
下载掌阅APP,畅读海量书库
立即打开



本书对激光SLAM和视觉SLAM技术进行了系统介绍,涉及基础理论、关键技术、应用实践及未来趋势,并探讨了它们与智能网联汽车的关系。既是想要在自动驾驶和智能汽车领域取得突破的从业者的阅读选择,也是追求SLAM技术深度与广度的专业人士的学习资料。
具体来说,本书从智能网联汽车的基本概念入手,详细介绍了SLAM技术的发展历程、架构设计、核心算法以及在自动驾驶等级中的应用现状和技术难点。不仅分析了多传感器融合技术的同步与标定方法、融合策略,还深入探讨了激光SLAM和视觉SLAM的点云处理、关键帧提取、后端优化等关键技术,并通过Cartographer、LOAM、LeGO-LOAM、LIO-SAM等算法的代码实战展示了SLAM技术的实际应用。此外,着重讲解了深度学习在SLAM中的应用,如相机重定位、特征点提取与匹配、视觉里程计、回环检测以及语义SLAM的最新进展。最后,展望了激光SLAM和视觉SLAM技术的未来发展趋势,提供了宝贵的行业洞察。
总的来说,本书适合自动驾驶、机器人技术、计算机视觉及相关领域的研究人员、工程师以及高等院校相关专业的师生阅读。通过本书,读者不仅能够获得SLAM技术的全面系统知识,还能深入理解其在智能网联汽车等领域的应用,为未来的研究与开发工作打下坚实的基础。
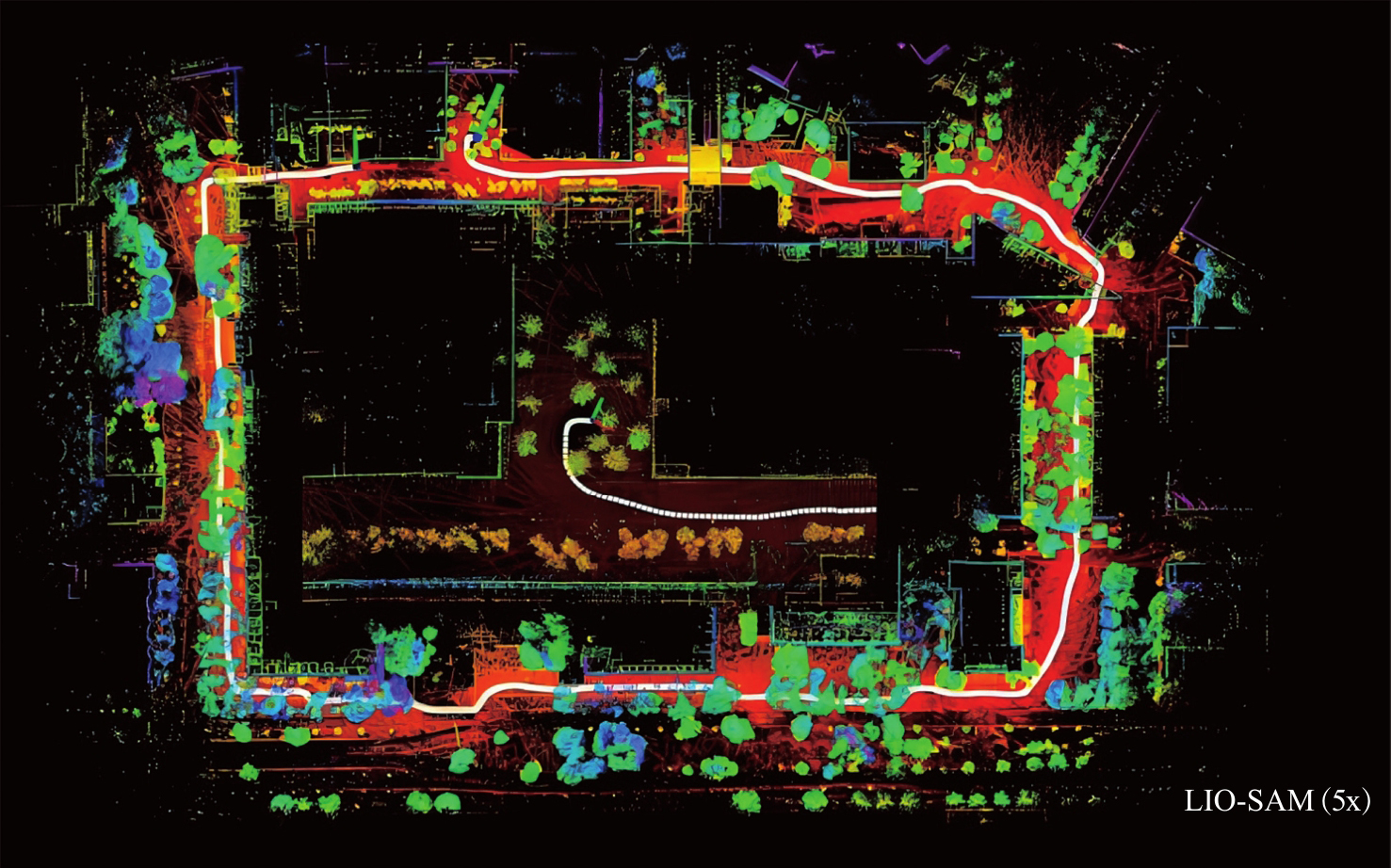
图3—10 传感器融合解决建图定位问题
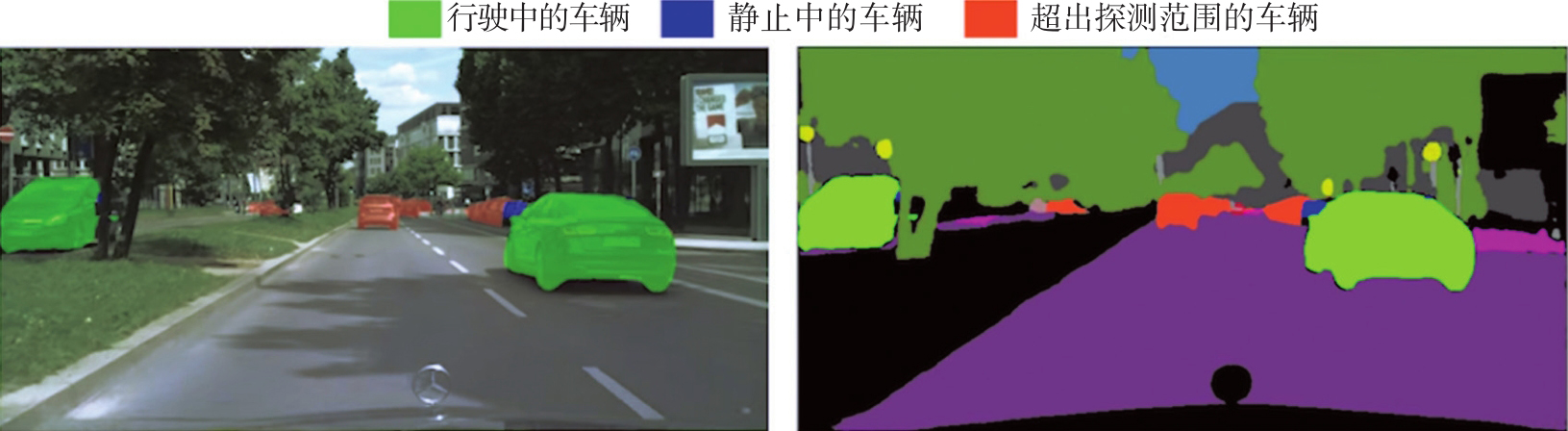
图3—11 传感器融合解决感知问题
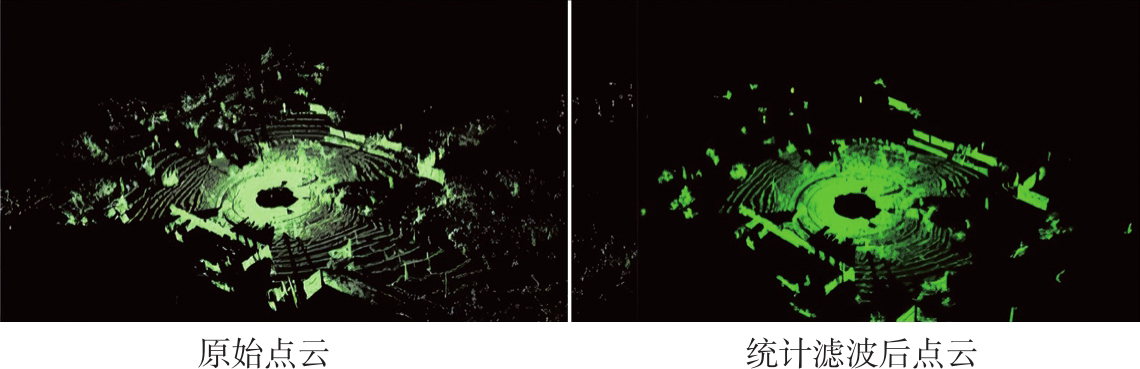
图4—2 统计滤波器
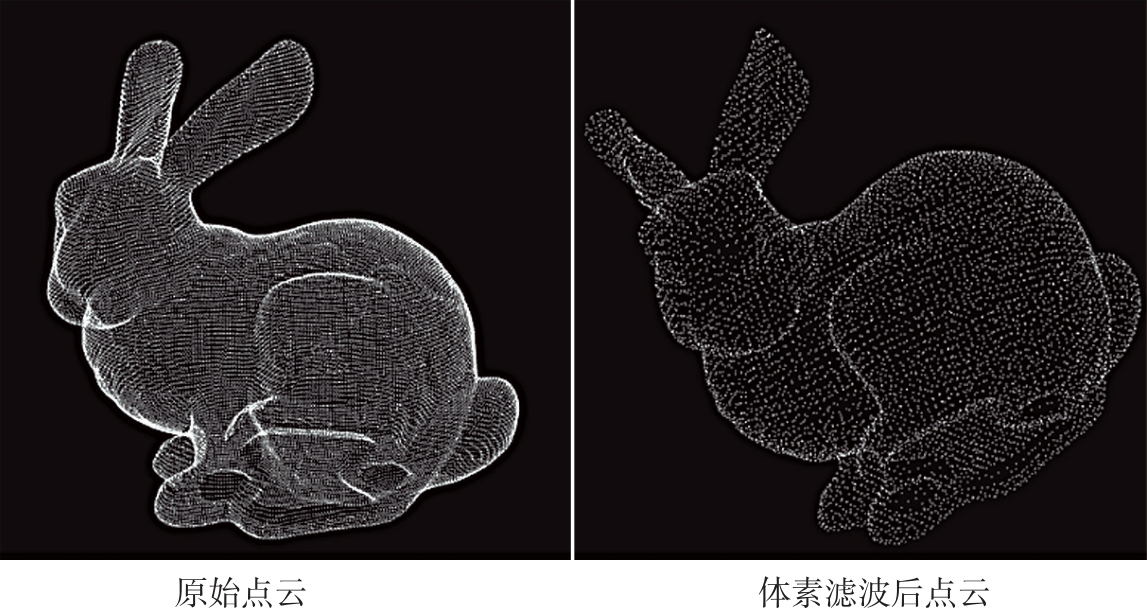
图4—3 体素滤波器
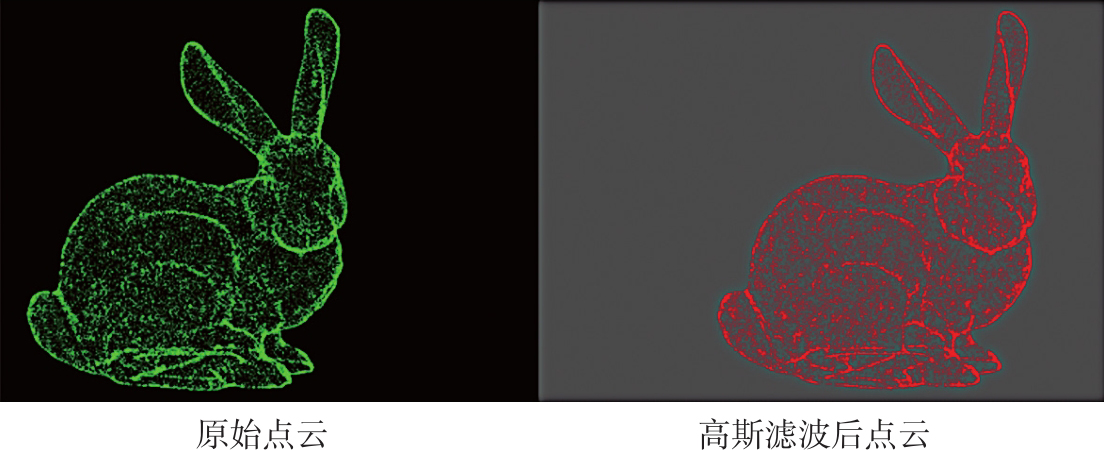
图4—4 高斯滤波器
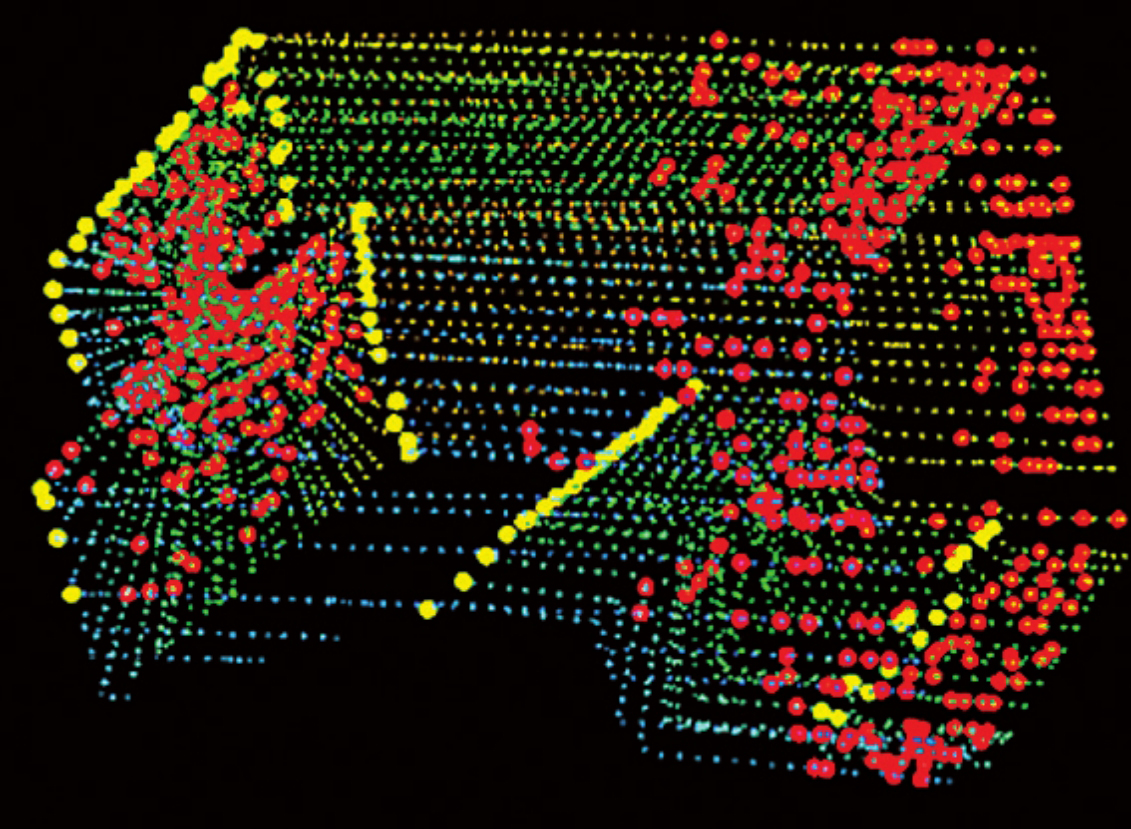
图4—17 提取的平面点和边缘点
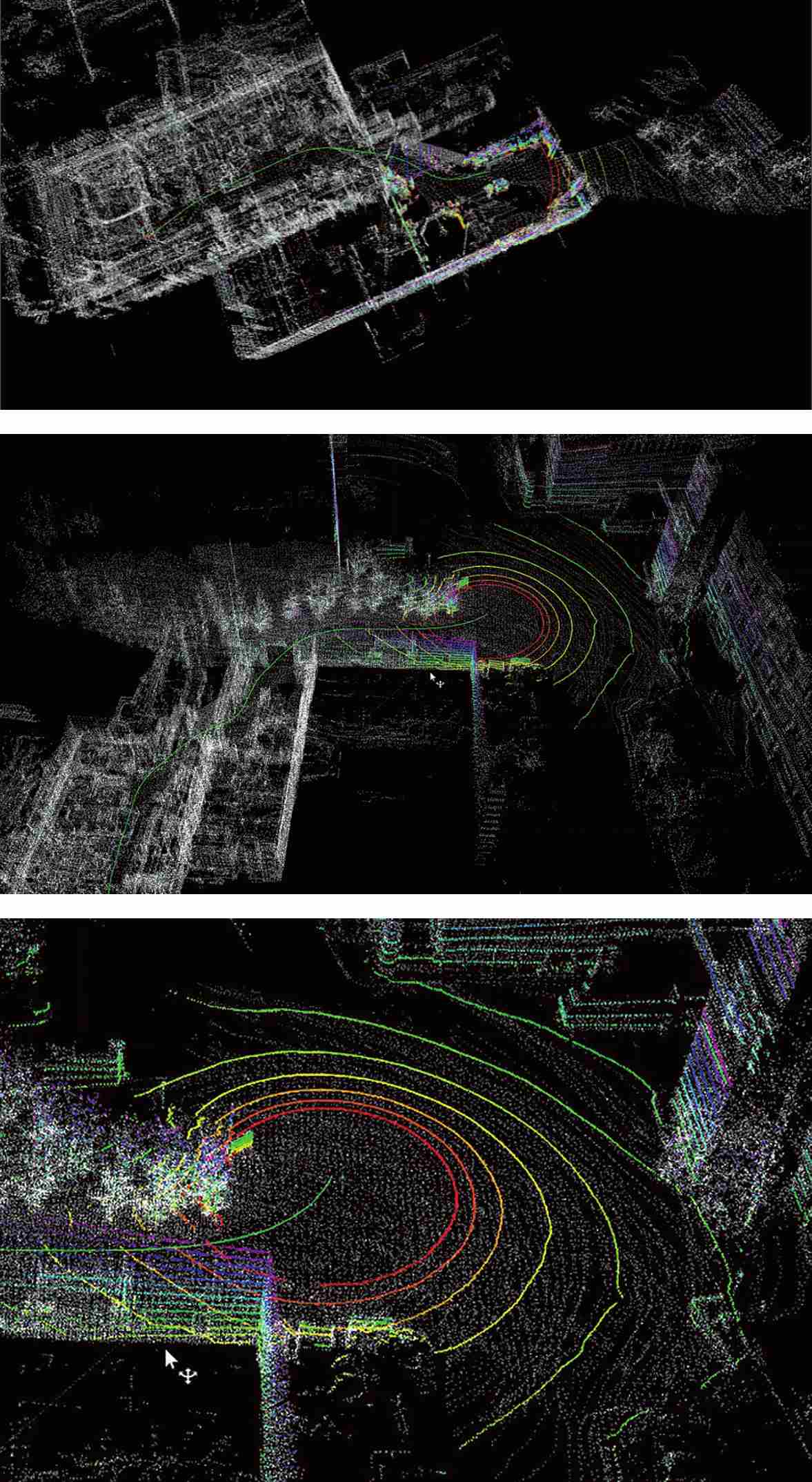
图4—21 NSH数据集运行效果
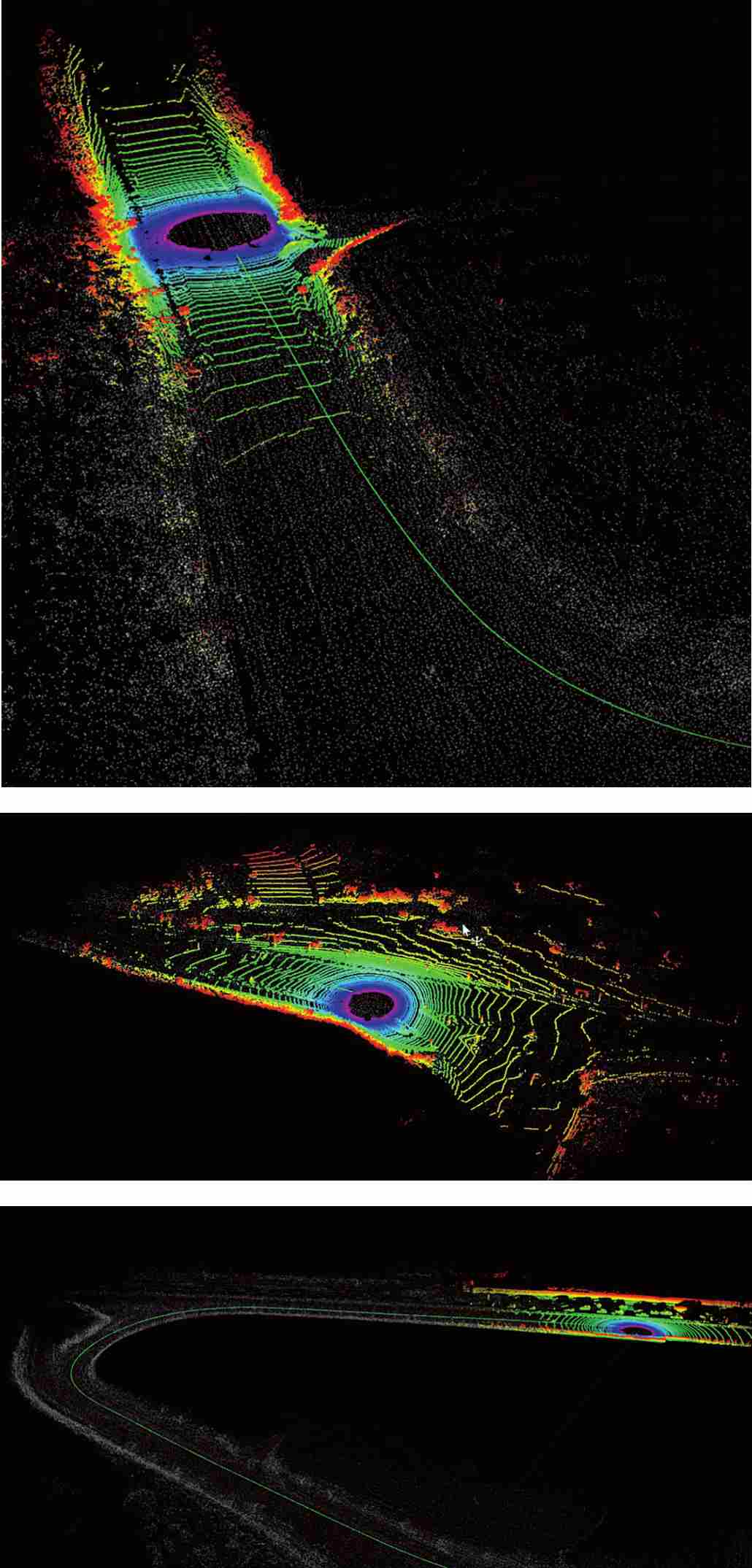
图4—22 KITTI数据集运行效果
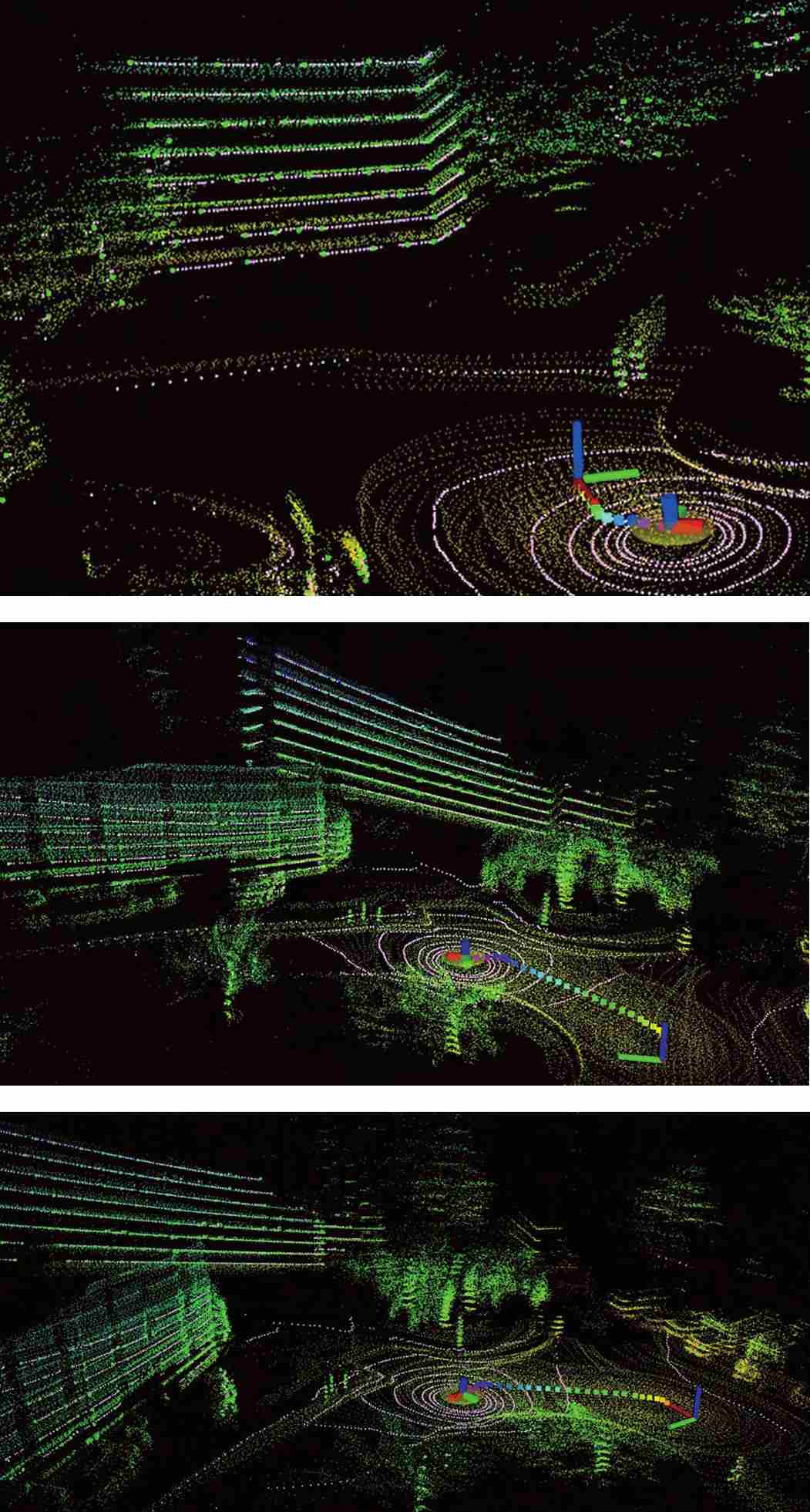
图4—25 LeGO-LOAM的运行效果
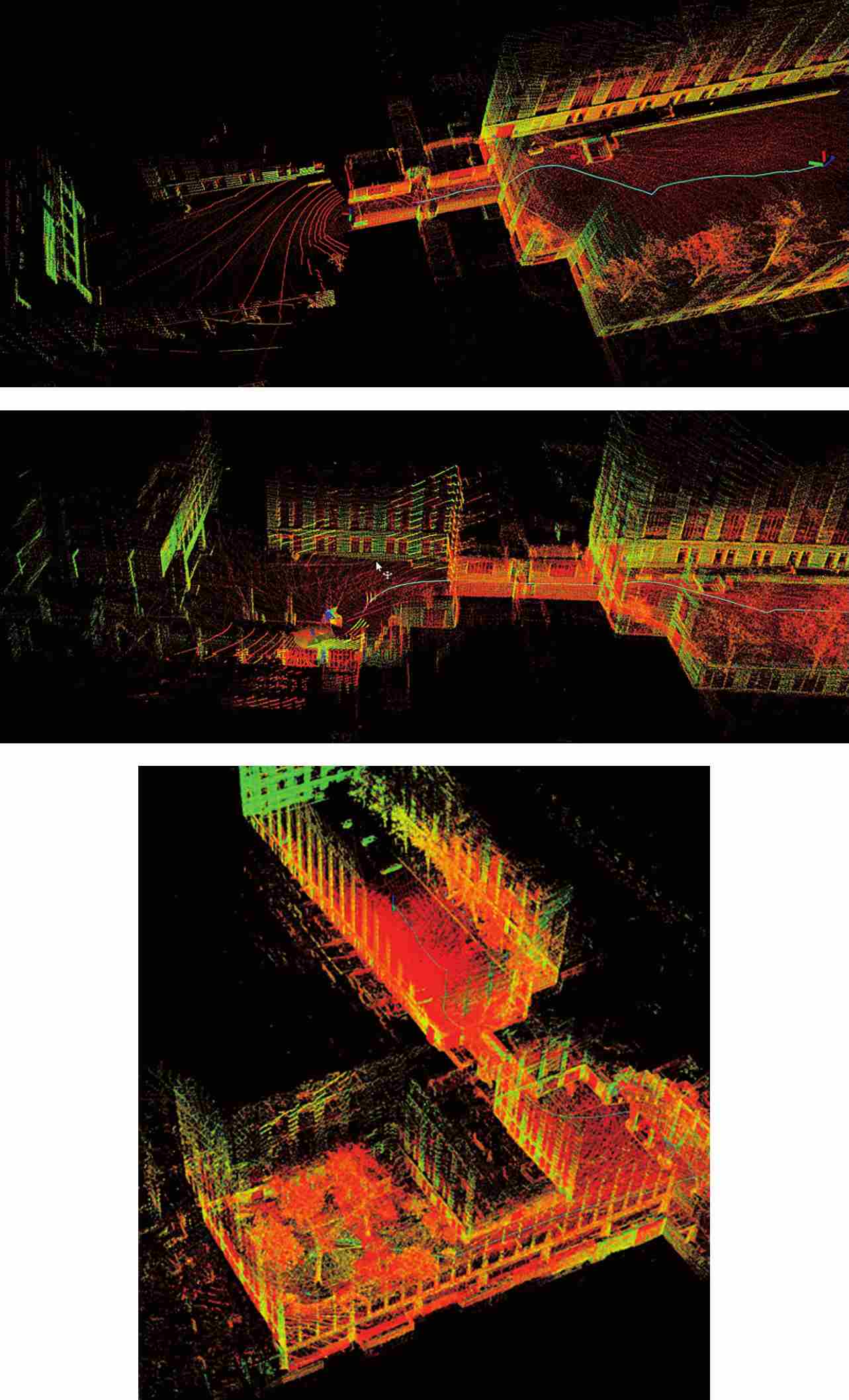
图4—28 LIO-SAM的运行效果

图6—16 针对单目SLAM的语义地图重建示例
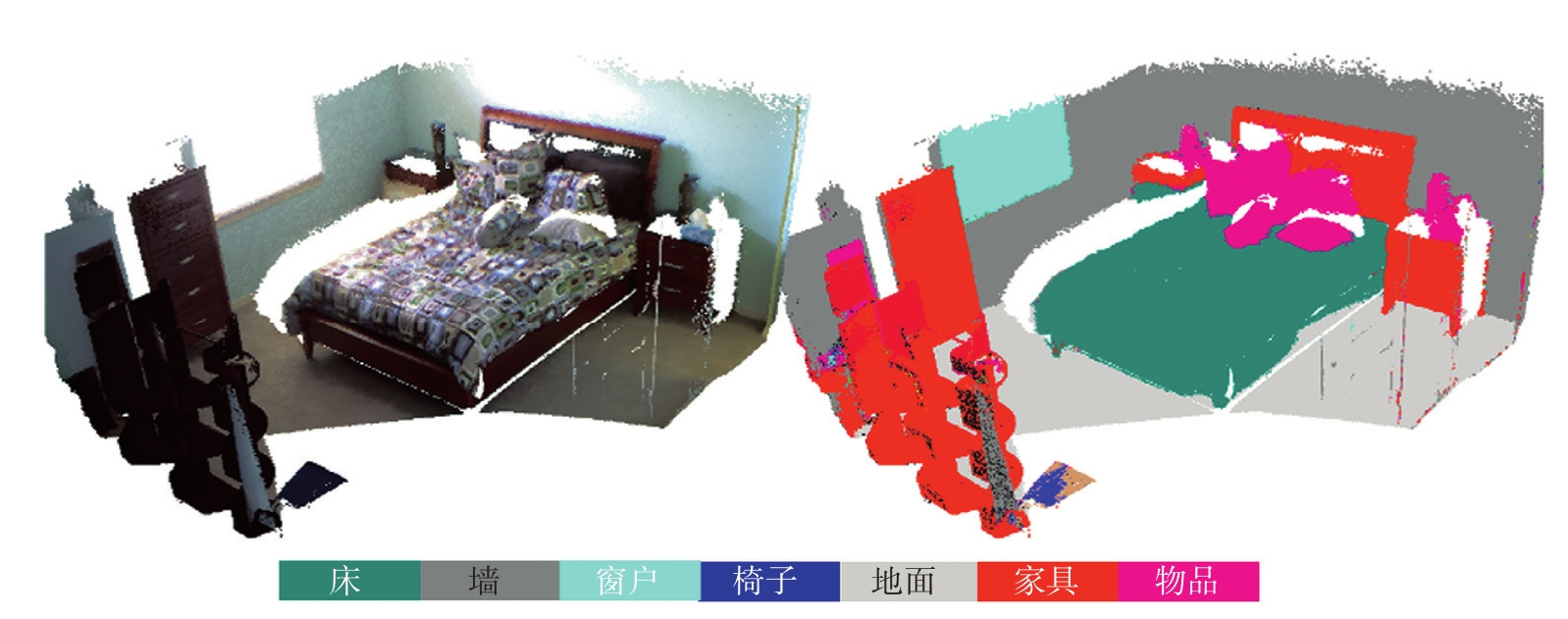
图6—17 稠密三维CNN语义建图在NYUv2上测试的结果