下载掌阅APP,畅读海量书库
立即打开



图像几何变换的实质就是改变像素的空间位置,并估算新空间位置上的像素灰度取值,使原始图像按照需要产生大小、形状和位置的变化,以改变图像中像素与像素之间的空间关系,从而重构图像的空间结构,达到处理图像的目的。从图像类型来分,有二维平面图像、三维立体图像的几何变换,由三维平面向二维平面投影变换等。从变换的性质分,有平移、镜像、缩放、转置、投影变换、旋转等基本变换及复合变换。
几何变换简单来说,就是建立变换前后像素之间的映射关系,通过这种映射关系能够知道原图像任意像素点在变换后的坐标位置,或者变换后的图像像素在原图像的坐标位置等。
数学公式如:
(4-1)
式中, x , y 分别表示输出图像像素的横、纵坐标; x 0 , y 0 分别表示输入图像像素的横、纵坐标;而 U , V 表示两种映射关系,通过输入的 x 0 和 y 0 来确定相应的 x 和 y 。
映射关系可能是线性关系,如:
(4-2)
映射关系也可能是非线性关系,如:

(4-3)
几何变换可以实现图像各像素点以坐标原点为中心的平移、缩放、镜像、旋转等各种变换。一般来说,变换后的点集矩阵=变换矩阵 T ×变换前的点集矩阵。
但是2×2变换矩阵 T 不能实现图像的平移以及绕任意点的缩放、镜像、旋转等变换。例如,令
则几何变换为
(4-4)
而平移公式为
(4-5)
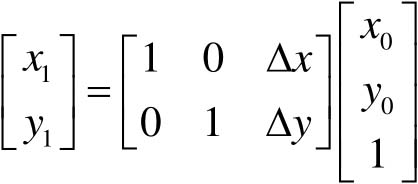
图像平移变换的矩阵形式:
(4-6)
该变换不能表示为变换矩阵 T ×变换前的点集矩阵的形式,由于矩阵 T 中没有引入平移常量,故无论 a 、 b 、 c 、 d 取什么值,都不能实现平移功能。为了用统一的矩阵线性变换形式表示和实现几何变换,将 T 矩阵扩展为如下2×3的变换矩阵:
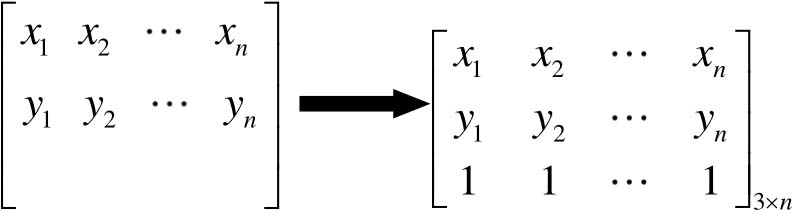
根据矩阵相乘的规律,在坐标列矩阵[ x y ]中引入第三个元素,扩展为3×1的列矩阵[ x y 1],可实现平移。
(4-7)
将2×3阶变换矩阵 T 进一步扩充为3×3方阵:
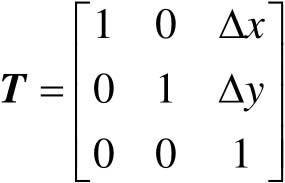
这样一来,以 n +1维向量表示 n 维向量的方法称为齐次坐标表示法。引入齐次坐标的目的主要是合并矩阵运算中的乘法和加法,可以实现上述各种几何变换的统一表示。齐次坐标的几何意义相当于点( x , y )投影在 xyz 三维立体空间的 z =1的平面上。
平移变换可以用如下形式表示:
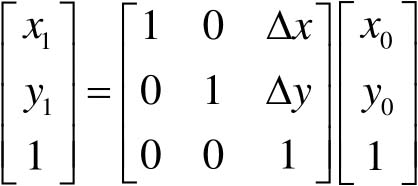
(4-8)
这里的几何变换全部采用统一的矩阵表示法,形式都如下:
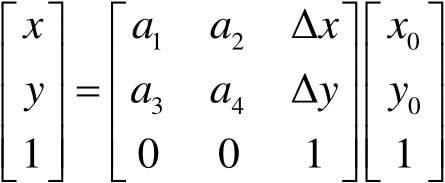
(4-9)
其中
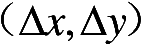 表示平移量,而参数
a
i
则反映了图像的旋转、缩放等变化。将这些参数计算出,即可得到两幅图像的坐标变换关系。
表示平移量,而参数
a
i
则反映了图像的旋转、缩放等变化。将这些参数计算出,即可得到两幅图像的坐标变换关系。
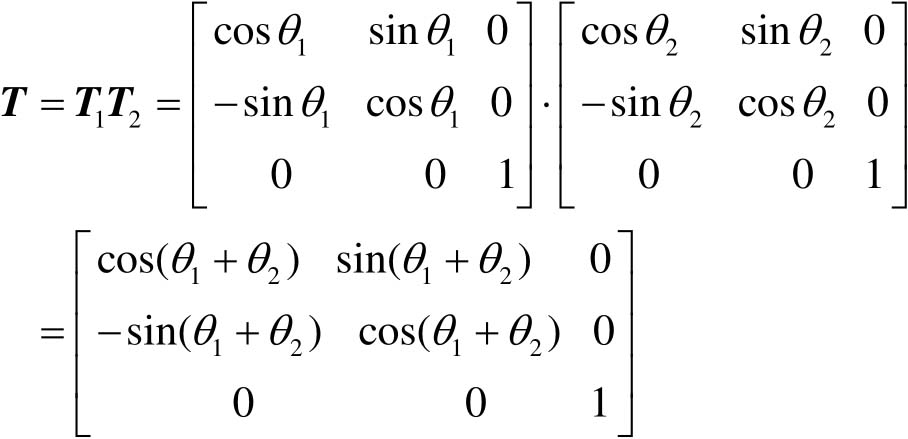
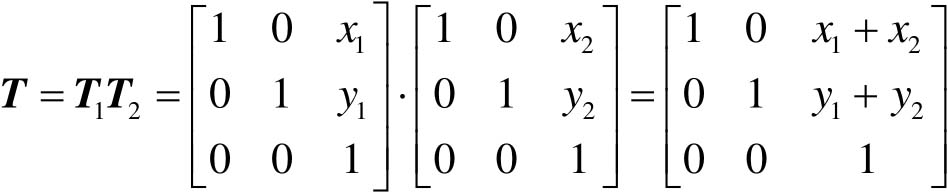
对给定的图像连续施行若干次的平移、镜像、缩放、旋转等基本变换 F 1 , F 2 ,…, F N 后,所完成的变换称为复合变换。复合变换的矩阵等于基本变换的矩阵按顺序相乘得到的组合矩阵,又叫级联变换。若干次基本变换仍可用3×3阶方阵表示。

复合平移:
复合缩放:

复合旋转: