
下载掌阅APP,畅读海量书库
立即打开



取
A 有不稳定特征值3、1、2、2,且( A , B )是可控的。
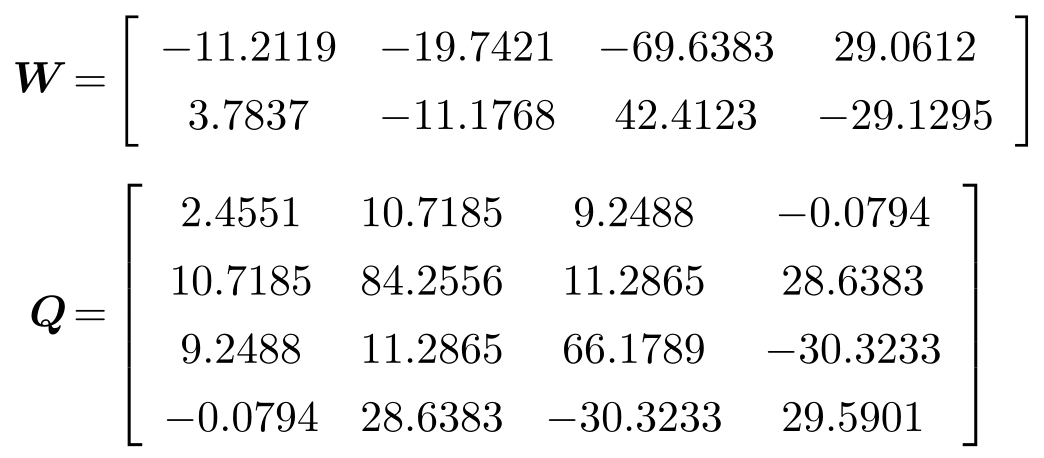
(1)求矩阵不等式(3-30),得到( W , Q )∈M为
(2)由定理3.2,可得( K , P )∈L,有
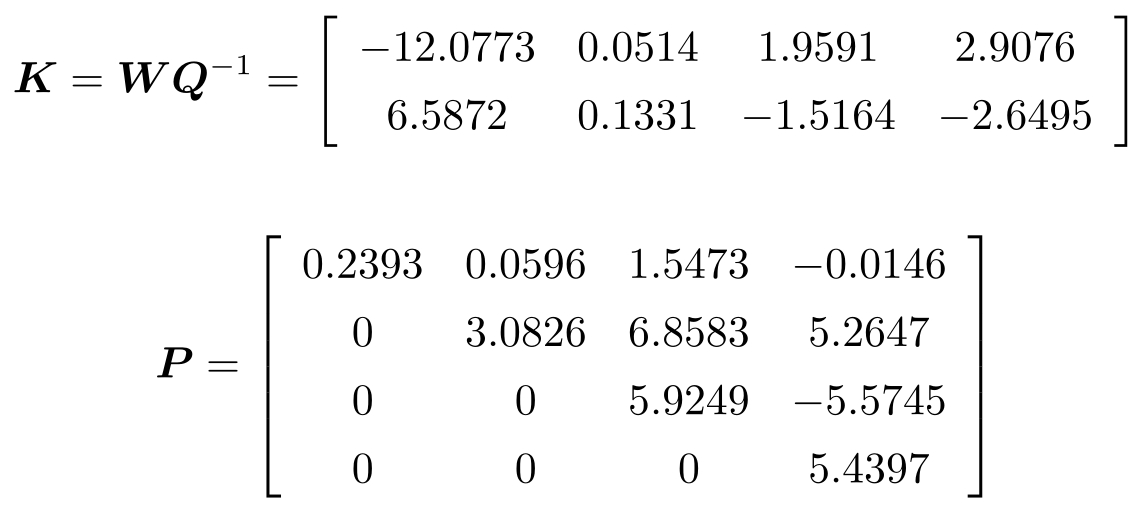
其中, P 利用Cholesky分解 Q = P P T 得到。
(3)注意到 ρ ( A + B K )=0.2261<1。尽管 A + B K 是Schur稳定的,它的最大奇异值,即谱范数为
δ ( A + B K )=20.9156>1
然而,有
δ ( P -1 ( A + BK ) P )=0.5304<1
(4)注意到 δ ( P -1 BKP )=9.3098, δ ( P -1 AP )=9.3078。这样可取量化器的一组参数 N =65, a =0.018, M =175和 η =0.95满足式(3-6)和式(3-8)。最后由式(3-7),得到码率 R =30。
(5)系统的状态响应 X t 如图3-2所示。初始状态 X 0 =[0.1,-0.2,0.3,-0.1] T , r 0 =0.5>|| X 0 || 2 , L 0 = δ ( P -1 )· r 0 =2.2017。
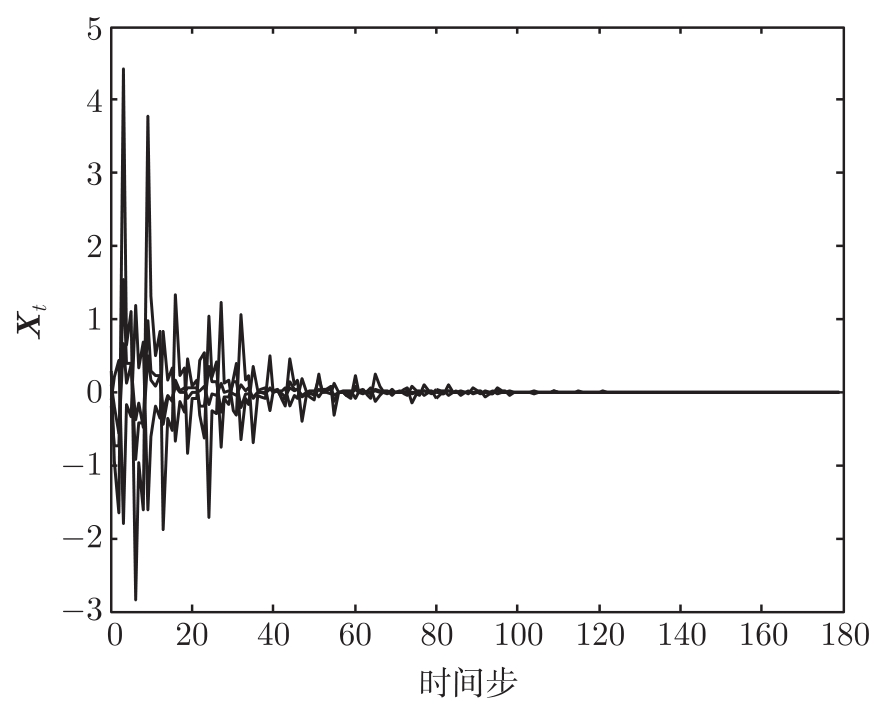
图3-2 系统状态 X t 的响应
(6)定义
这里
Y
t
=
P
-1
X
t
是系统式(3-14)的状态。函数
g
(
t
)表示
Y
t
落入支撑球的哪个区域。图3-3显示状态
 在区域
在区域
 和
和
 之间频繁切换。尽管
频繁地出入区域
之间频繁切换。尽管
频繁地出入区域
 ,但由于
,但由于
 ≤
≤
 并且
→0,因此
是收敛的,如图3-4所示。
并且
→0,因此
是收敛的,如图3-4所示。
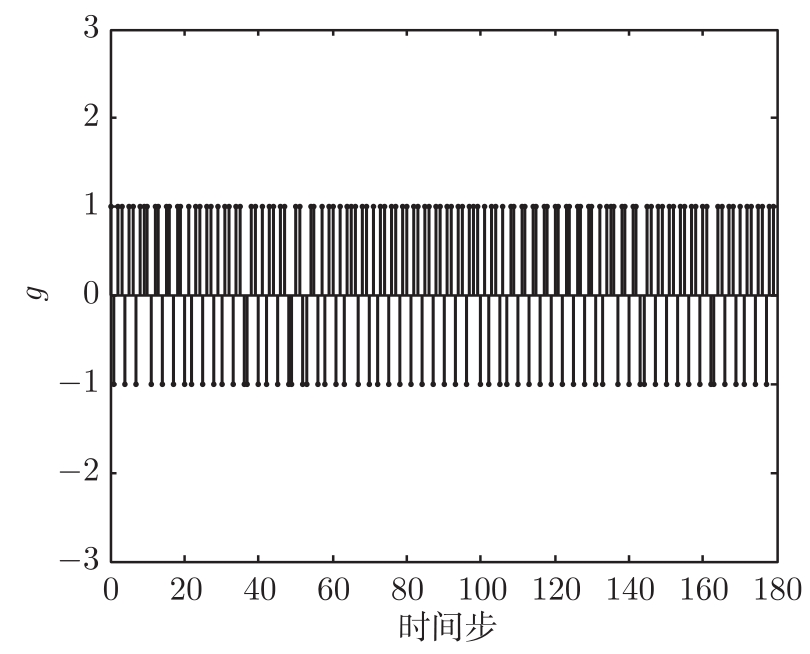
图3-3 系统式(3-14)的状态 Y t 所处的区域
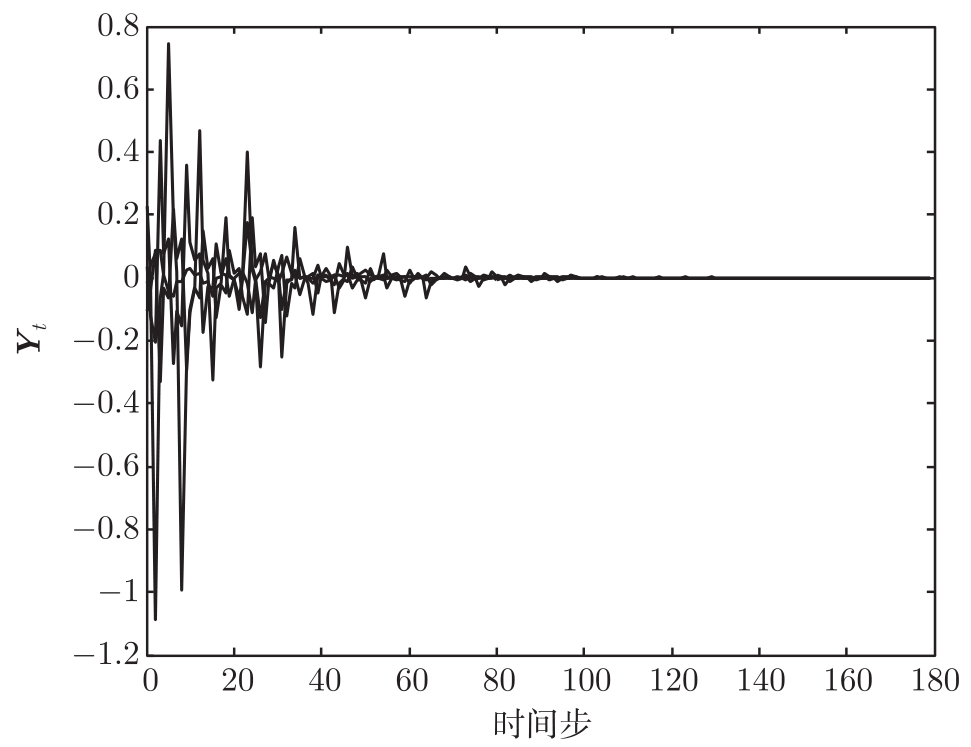
图3-4 系统式(3-14)的状态 Y t 的响应