
下载掌阅APP,畅读海量书库
立即打开



现在给出球极坐标量化器的一个重要性质,利用这个性质可以简化系统稳定性的分析。先给出一个引理。
引理2.1
[
r θ
1
θ
2
…
θ
d
-2
θ
d
-1
]
T
和
 分别表示
X
,
Y
∈R
d
的球极坐标,则有
分别表示
X
,
Y
∈R
d
的球极坐标,则有
这里‖·‖ 2 表示向量的2范数。
证明: 用 d -1个球极坐标
分别表示 d -1个点 Z 1 , Z 2 ,…, Z d -1 ∈R d ,则有
|| Y-X || 2 ≤|| Y-Z 1 || 2 +|| Z 1 -Z 2 || 2 +…+|| Z d -2 -Z d -1 || 2 +|| Z d -1 -X || 2
并且

为估计|| Z 1 -Z 2 || 2 ,考虑连接点 Z 1 和 Z 2 的弧 γ :
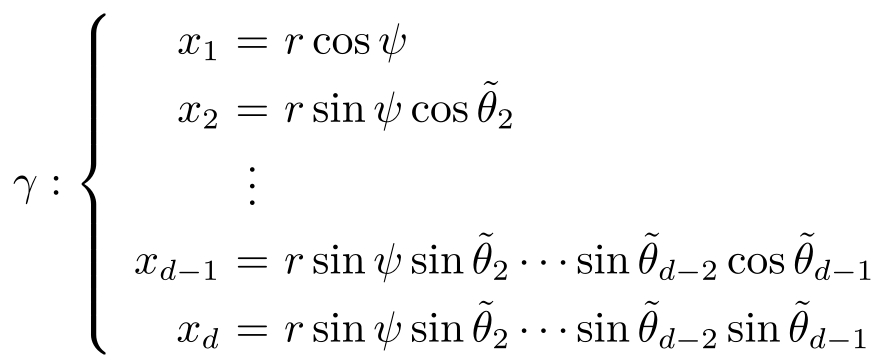
这里,参数
ψ
在
θ
1
和
 之间变化。显然
之间变化。显然
|| Z 1 -Z 2 || 2 ≤length( γ )
进一步注意到
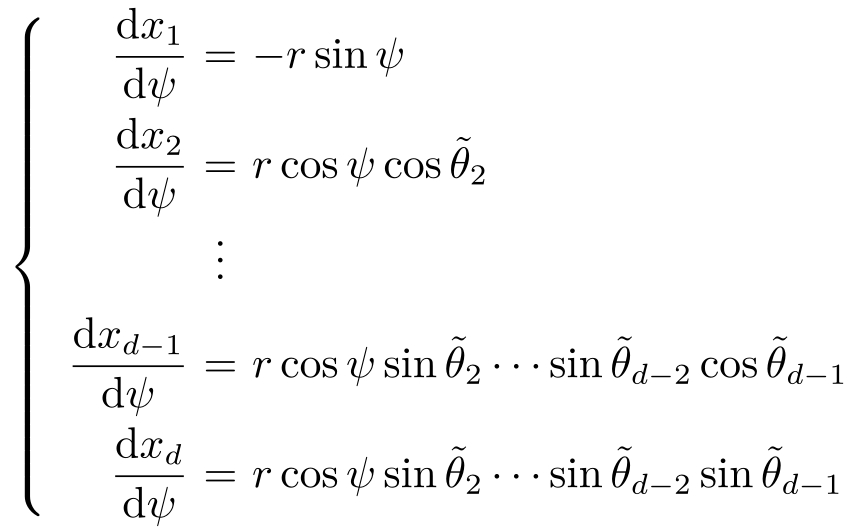
则有
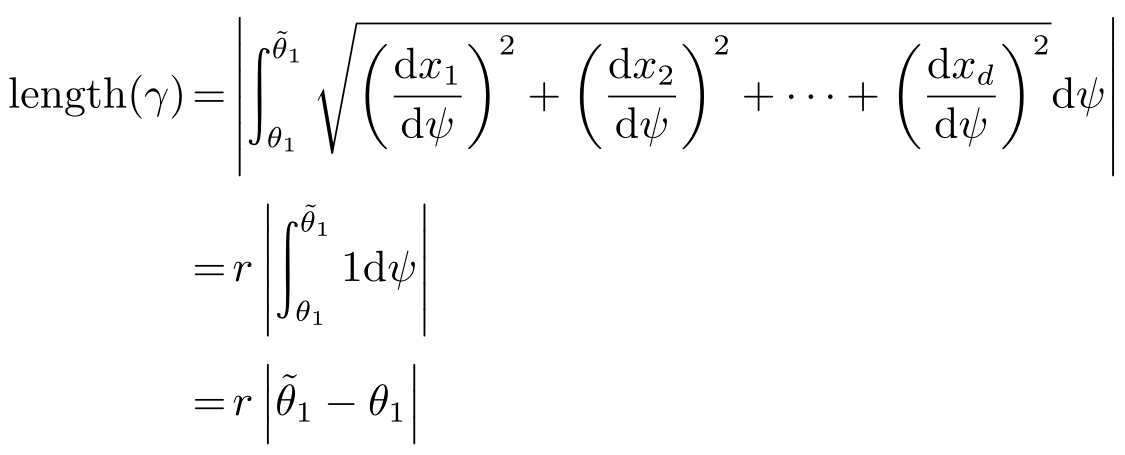
因此有

类似地,得到其他的估计,这样就完成证明。
图2-4为引理2.1的图示。
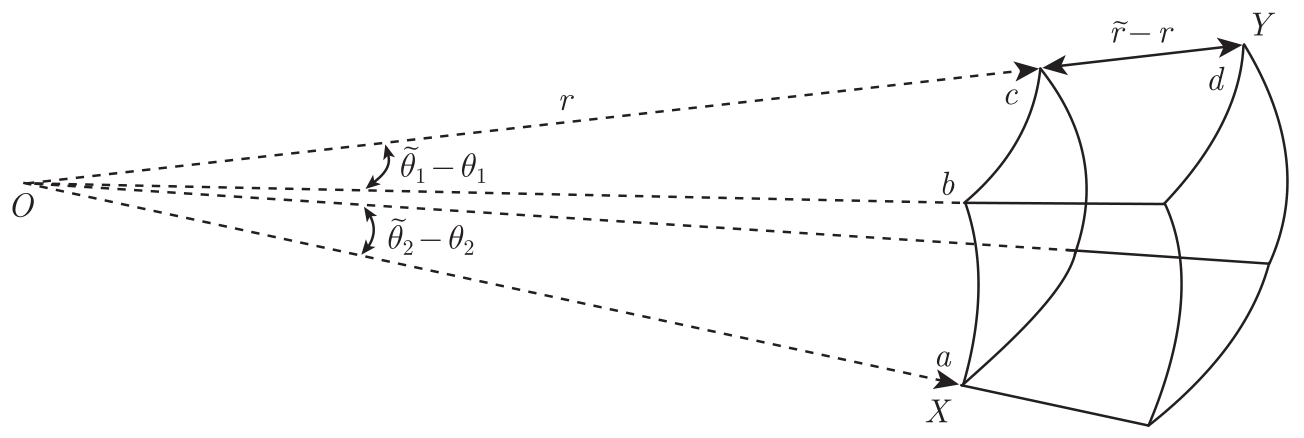
图2-4 引理2.1的图示
定理2.1 对于量化器( L,N,a,M )、编码映射 q 和解码映射 h ,任意的量化误差满足


证明:
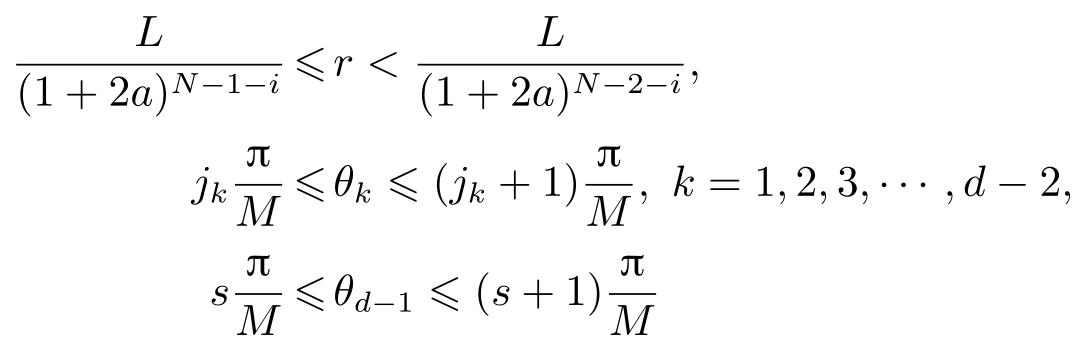
由于
 ,所以
X
位于由(
i,j
1
,
j
2
,…,
j
d
-2
,
s
)索引的量化块内(见定义2.1)。
X
的球极坐标[
r θ
1
θ
2
…
θ
d
-2
θ
d
-1
]
T
满足
,所以
X
位于由(
i,j
1
,
j
2
,…,
j
d
-2
,
s
)索引的量化块内(见定义2.1)。
X
的球极坐标[
r θ
1
θ
2
…
θ
d
-2
θ
d
-1
]
T
满足
则 X 的量化值 h ( q ( X ))为
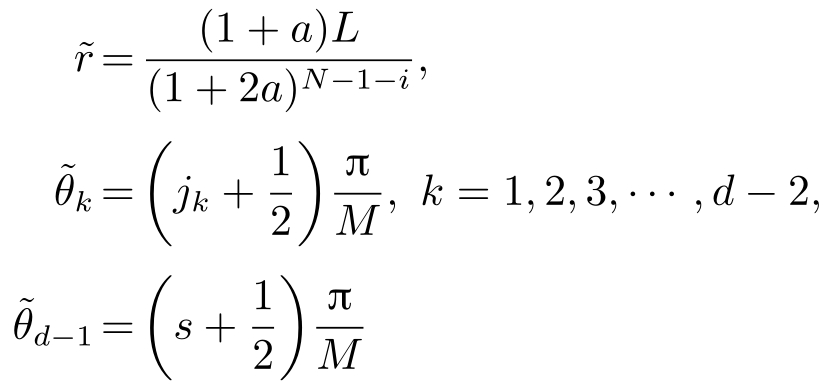
注意到 r =|| X || 2 ,由引理2.1可得
注解2.1
由定理2.1,在
 中被量化的数据
X
和对应的量化误差
h
(
q
(
X
))
-X
之间的关系很自然地反映了一个直觉概念:当||
X
||
2
趋于0时,量化器的分辨率变得精细;反之,当||
X
||
2
远离0时,量化器的分辨率变得粗糙。
中被量化的数据
X
和对应的量化误差
h
(
q
(
X
))
-X
之间的关系很自然地反映了一个直觉概念:当||
X
||
2
趋于0时,量化器的分辨率变得精细;反之,当||
X
||
2
远离0时,量化器的分辨率变得粗糙。
注解2.2 为获得有限码率,包含原点的最小球 S 1 ( k )被看作一个量化块,不再被分割。