
下载掌阅APP,畅读海量书库
立即打开




学校名称:大连理工大学
团队队员:崔俊涛、丁昌德、孙铭泽
指导老师:吴振宇、程春雨
摘要
本作品是基于海思Hi3861实现的一款智慧互联球形机器人——圆神。在局域网中,通过微信小程序可以连接本作品,用户可以在手机端对球体的姿态和外设进行控制。此外,用户也可以通过语音交互模块控制本作品,并与其进行交互。本作品具有无线充电与有线充电两种充电方式。
在控制方面,本作品通过九轴陀螺仪获取球体的姿态,使用串级PID算法实现球体姿态的快速稳定控制,通过GPS模块和陀螺仪的组合导航可以实时修正航向角,实现更加准确的户外场地定点巡航。
本作品采用独特的极坐标取模算法来控制球体顶部的LED,可在球体旋转的同时显示用户想要的图案和文字,并且可以通过速度的闭环控制实现类似时钟的时间显示效果。
在局域网中,可通过微信小程序连接本作品,在手机端对球体的姿态和外设进行控制。此外,也可以通过语音交互模块与本作品进行交互。本作品内部包含独特的旋转LED屏幕,可用于展示图案、文字,为使用者提供独特的视觉、听觉及交互体验。如果条件允许,还可以利用Hi3861的Wi-Fi模块实现多球互动,排布阵列,展示更加出彩的效果。
本作品支持无线充电和有线充电,将球体置于制作好的模具内即可进行无线充电,也可以使用球壳内部的柔性太阳能电池板进行充电。
由于本作品具有独特的球形结构,所以具有防水、不易伤人、转向方便、外观可爱等优点,适合作为陪伴孩童玩耍的可靠伙伴,解放家长双手。本作品内部独特的旋转LED屏幕可展示图案、文字,加上球体内部的语音交互模块,可以为使用者提供独特的视觉与听觉体验,不仅能够吸引孩童作为玩耍伙伴,也可以摆放在店铺门口吸引大众,起到广告、科普、吸引客流量的作用,还可以用于智能家居,作为一个炫彩时钟或者语音助手。
本作品利用Hi3861及OpenHarmony操作系统的互联特性,通过手机可以对本作品的各个模块进行操作,并且可以控制球体的运动。此外,也可以通过语音识别与语音播报进行人机交互。在控制方面,本作品通过九轴陀螺仪获取球体的姿态,并且使用串级PID算法实现球体姿态的快速稳定控制。通过GPS模块和陀螺仪的组合导航可以实时修正航向角,实现更加准确的户外场地定点巡航。
本作品采用独特的极坐标取模算法控制球体顶部的LED,可以在旋转的同时展示用户想要的图案和文字,并且可以通过速度的闭环控制实现类似时钟的时间显示效果。
本作品的无线充电功能采用基于555定时器的振荡电路,通过两个大的电感线圈进行电能的无线传递。
(1)通信速率:本作品与微信小程序之间的快速通信可以保证球体的快速控制,防止意外发生。
(2)姿态控制速度:本作品的姿态控制速度越快,就可以完成更加灵活的运动轨迹。此外,如果球体受到外部冲击,快速的姿态控制可以保证球体内部工作平台维持在一个较好的工作状态,提升了本作品的整体稳定性。
(3)旋转LED屏幕显示稳定度:通过独创的圆形LED点阵算法,使旋转LED屏幕可以稳定地显示想要的文字或者图形。
(4)无线充电速度与效率:更快的无线充电速度可以让本作品更快地恢复动力,更高的效率可以增加无线充电插座的续航时间。此外,还可以使用柔性太阳能电池板进行充电。
(5)定点巡航准确度:更加合适的GPS滤波算法可以使定点巡航的规划路线与实际路线更加贴合。
(1)球形机器人的控制策略。本作品通过九轴陀螺仪获得球体的姿态,采用串级PID算法进行控制,可动态调整球体的重心,对横滚角和俯仰角进行快速准确的控制。
(2)采用微信小程序或者语音进行控制。在接收到控制信号后本作品可以通过语音或者旋转LED屏幕进行反馈,可在不接触球体内部电路的情况下完成与本作品的交互,更加安全。
(3)利用Hi3861独特的互联能力,第一次使用本作品的用户可以很快通过微信小程序与本作品进行稳定的双向通信,进而控制球体姿态和运动轨迹。
(1)确定需求:明确本作品的功能和用途,它是用于娱乐与展示信息的。
(2)机械结构设计:确定本作品的外观和尺寸,选择合适的材料和组件。考虑到本作品需要自由滚动,因此机械结构通常包括一个内部驱动系统和外壳。
(3)控制系统设计:设计本作品的控制系统,包括传感器、执行器和控制算法。本作品使用惯性测量单元(IMU)、视觉传感器、距离传感器等来感知环境,然后根据传感器数据来控制本作品的运动和行为。
(4)软件开发:编写本作品的控制软件,包括运动控制、路径规划等。此外,根据本作品的功能需求,需要开发语音识别、图像处理、人机交互等功能模块。
(5)测试和迭代:对本作品进行测试,验证其功能和性能。根据测试结果进行优化和改进,不断迭代完善本作品的设计。
(6)上市和推广:将本作品推向市场,进行宣传和销售;与用户沟通反馈,持续改进和优化本作品。
本作品的外壳是亚克力透明球壳,内部中心为控制平台,通过控制内部的电机与舵机可控制球体重心位置,进而控制球体运动姿态。此外,球体内部还有语音交互模块、旋转LED屏幕等其他组成部分。本作品的实物图如图1.5-1所示。

图1.5-1 本作品的实物图
本作品包括2块Hi3861核心板,其中一块是主控板,负责控制本作品;另一块是副控板,负责旋转LED屏幕的显示。本作品的整体框架如图1.5-2所示。
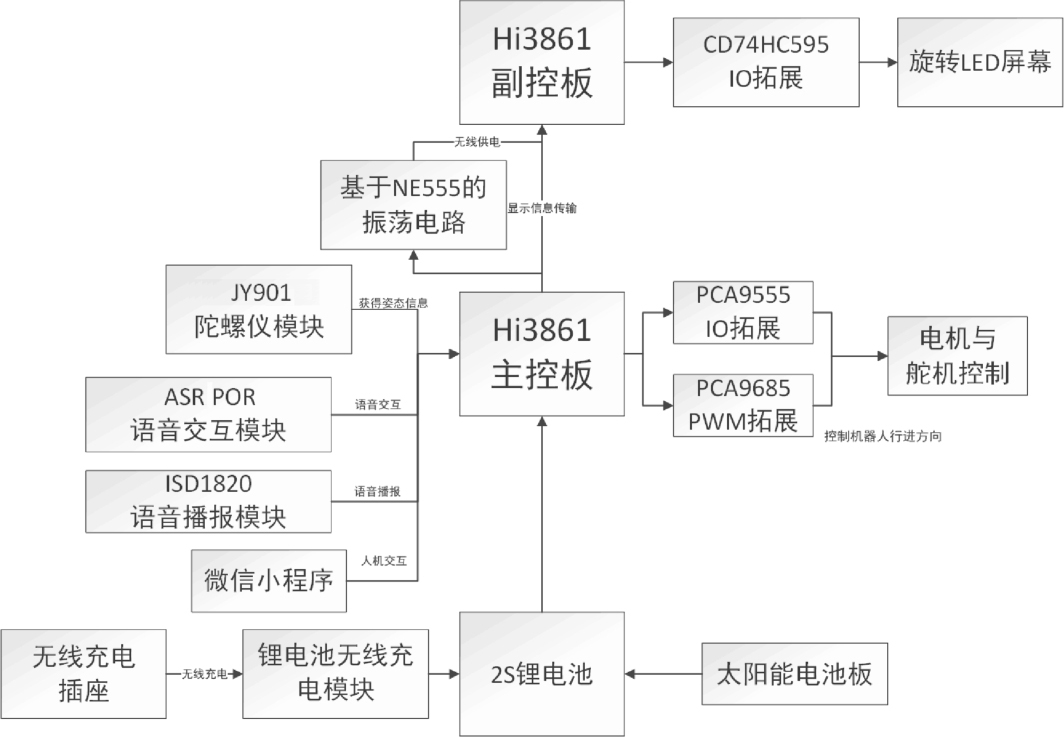
图1.5-2 本作品的整体框架
(1)机械设计。本作品的机械结构如图1.5-3所示,可通过旋转实现亚克力球壳的开关。
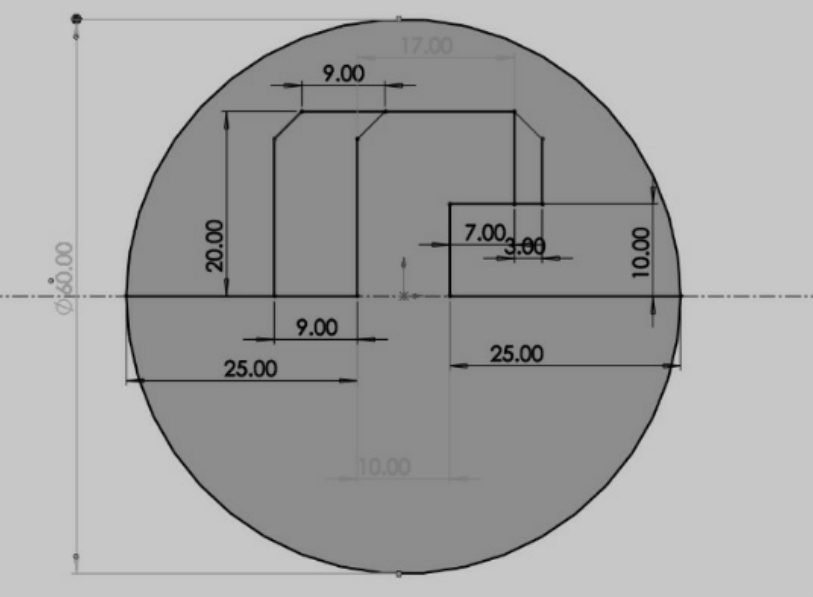
图1.5-3 本作品的机械结构(单位为mm)
(2)各电路模块简介如下。
①主控板。主控板的电路原理图如图1.5-4和图1.5-5所示。主控板主要用于和各个模块进行通信,以及产生用于无线充电的振荡波等,主控板通过UART与JY901和ASR PRO进行通信。由于Hi3861的IO接口数量较少,因此本作品使用PCA9555对IO接口进行了扩展,用于控制各种外设。此外,Hi3861不能生成频率小于1000 Hz的PWM信号,因此本作品使用PCA9555模块进行PWM信号拓展,用于控制舵机。
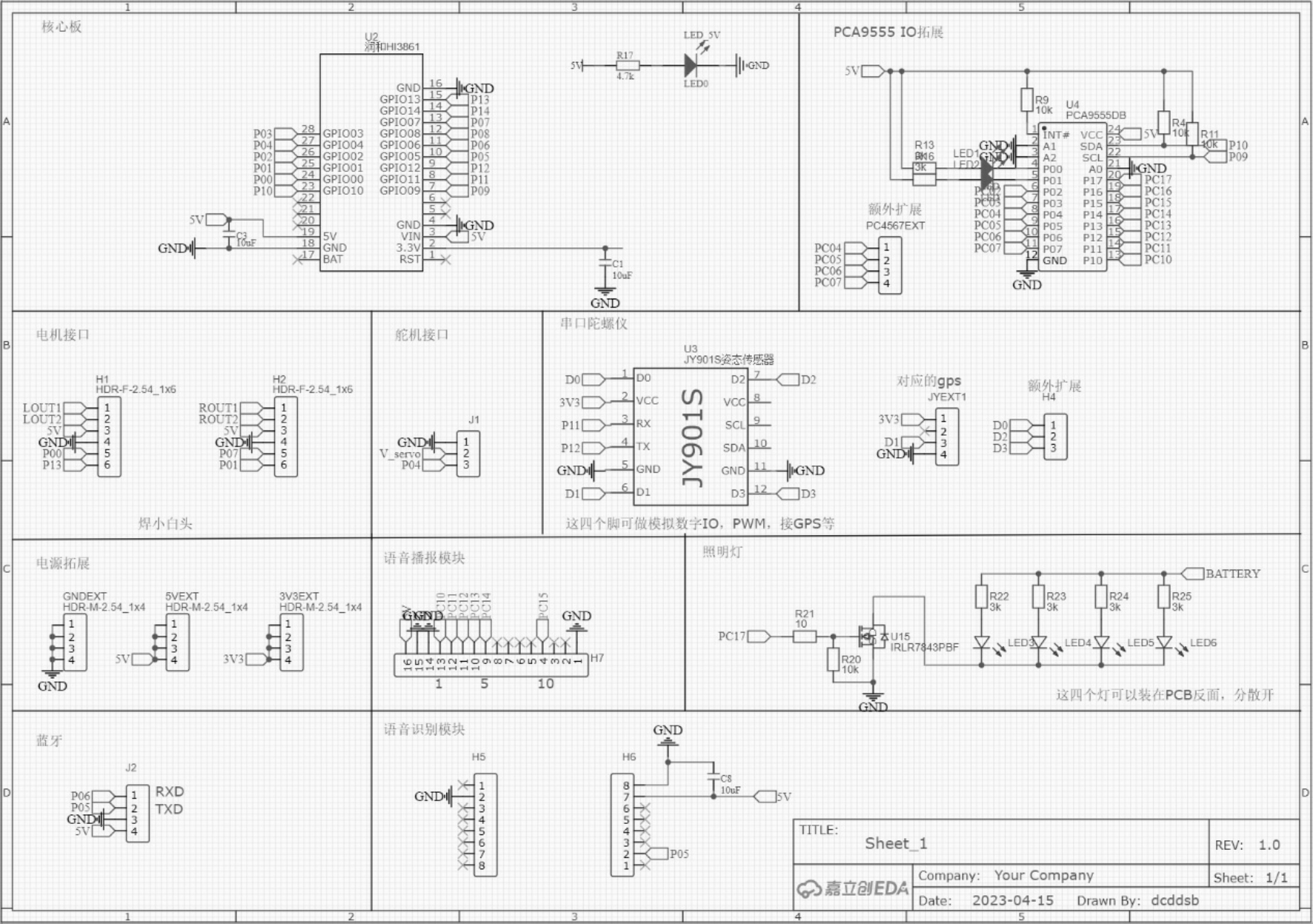
图1.5-4 主控板的电路原理图(一)
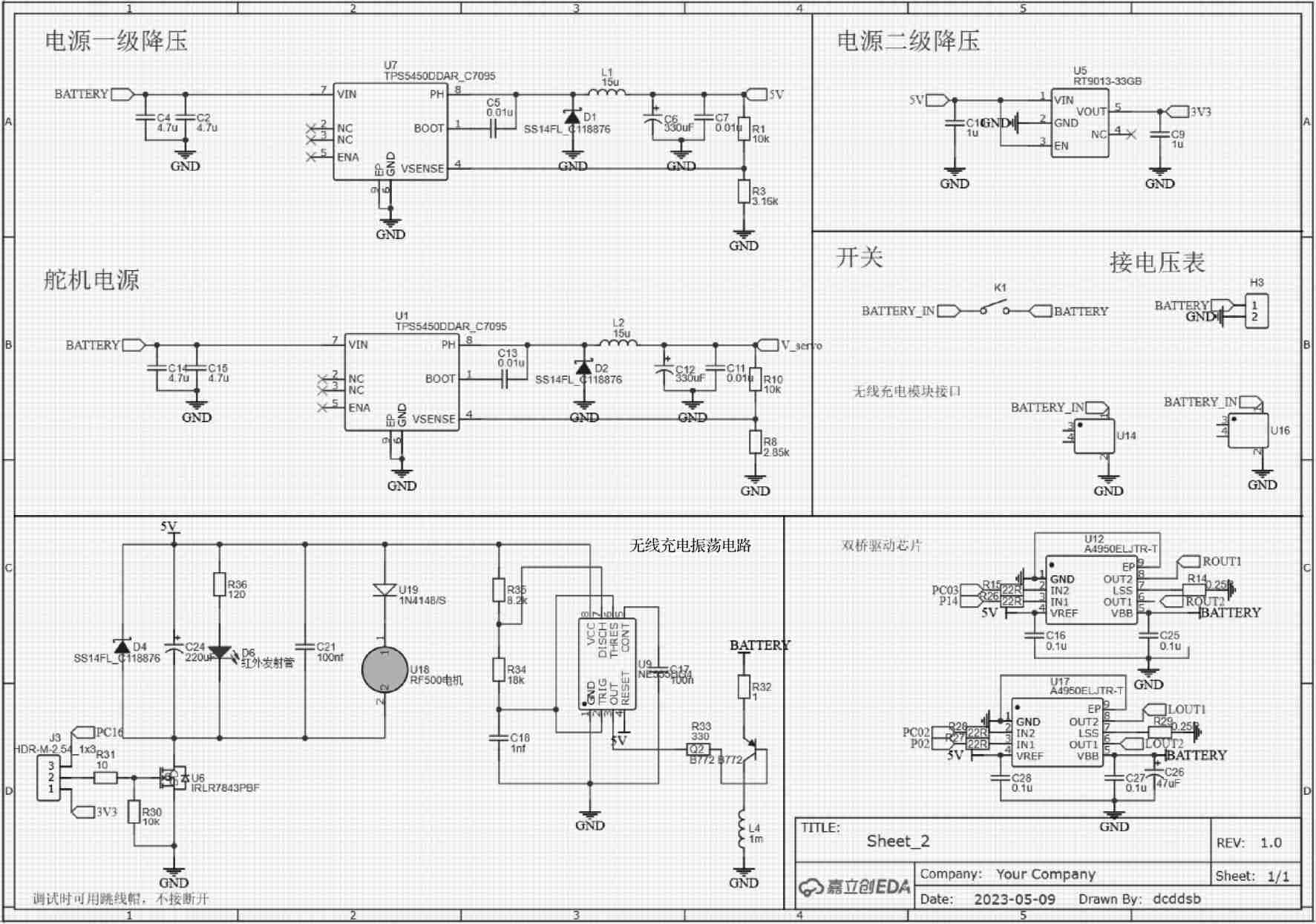
图1.5-5 主控板的电路原理图(二)
本作品的主控板的布线图如图1.5-6所示,主控板PCB如图1.5-7所示。
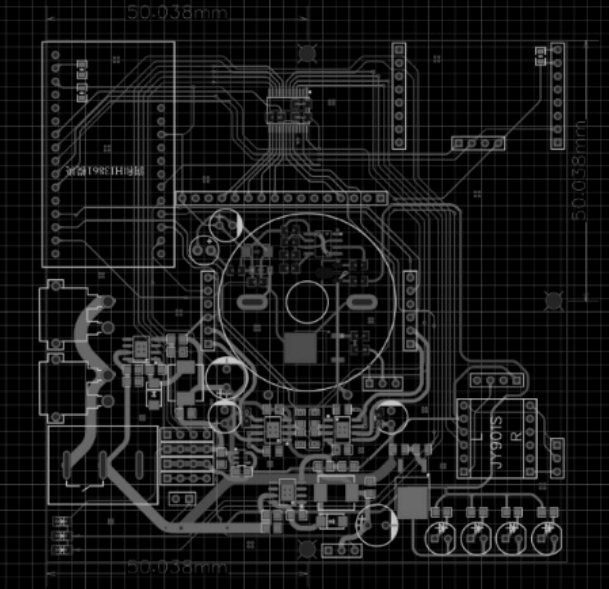
图1.5-6 主控板的布局布线图
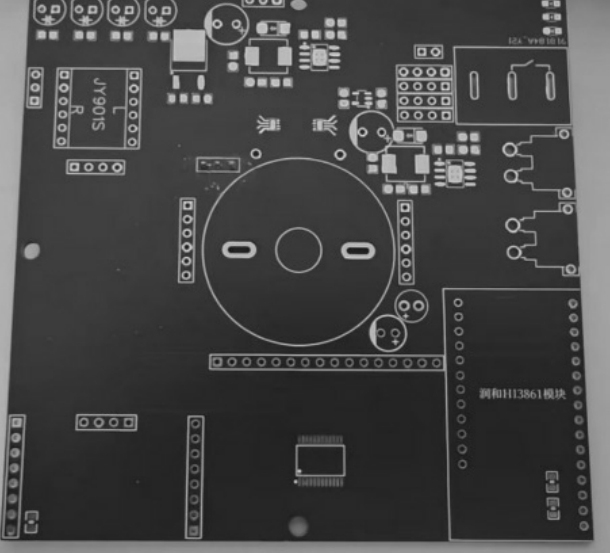
图1.5-7 主控板PCB
②副控板。副控板主要用于控制旋转LED屏幕的显示,使用CD74HC595移位寄存器对IO接口进行了扩展。副控板还带有无线供电接收电路与TP4056锂电池充电电路,用于给副控板上的锂电池进行充电。副控板的电路原理图如图1.5-8、图1.5-9和图1.5-10所示。
为了在旋转LED屏幕旋转时保持球体的平衡,本作品采用了中心对称的设计。
本作品的副控板的布线图如图1.5-11所示,副控板PCB如图1.5-12所示。
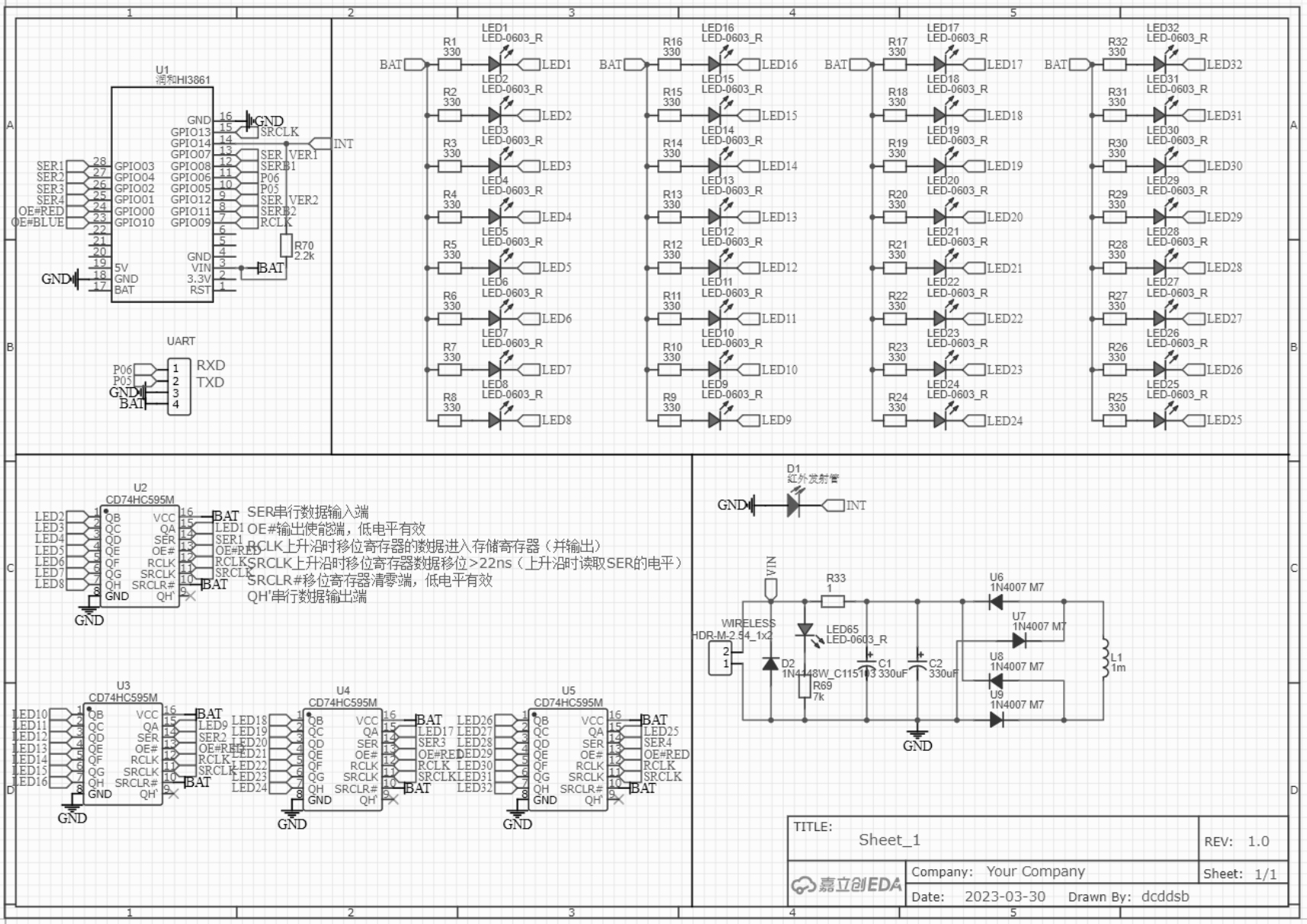
图1.5-8 副控板的电路原理图(一)
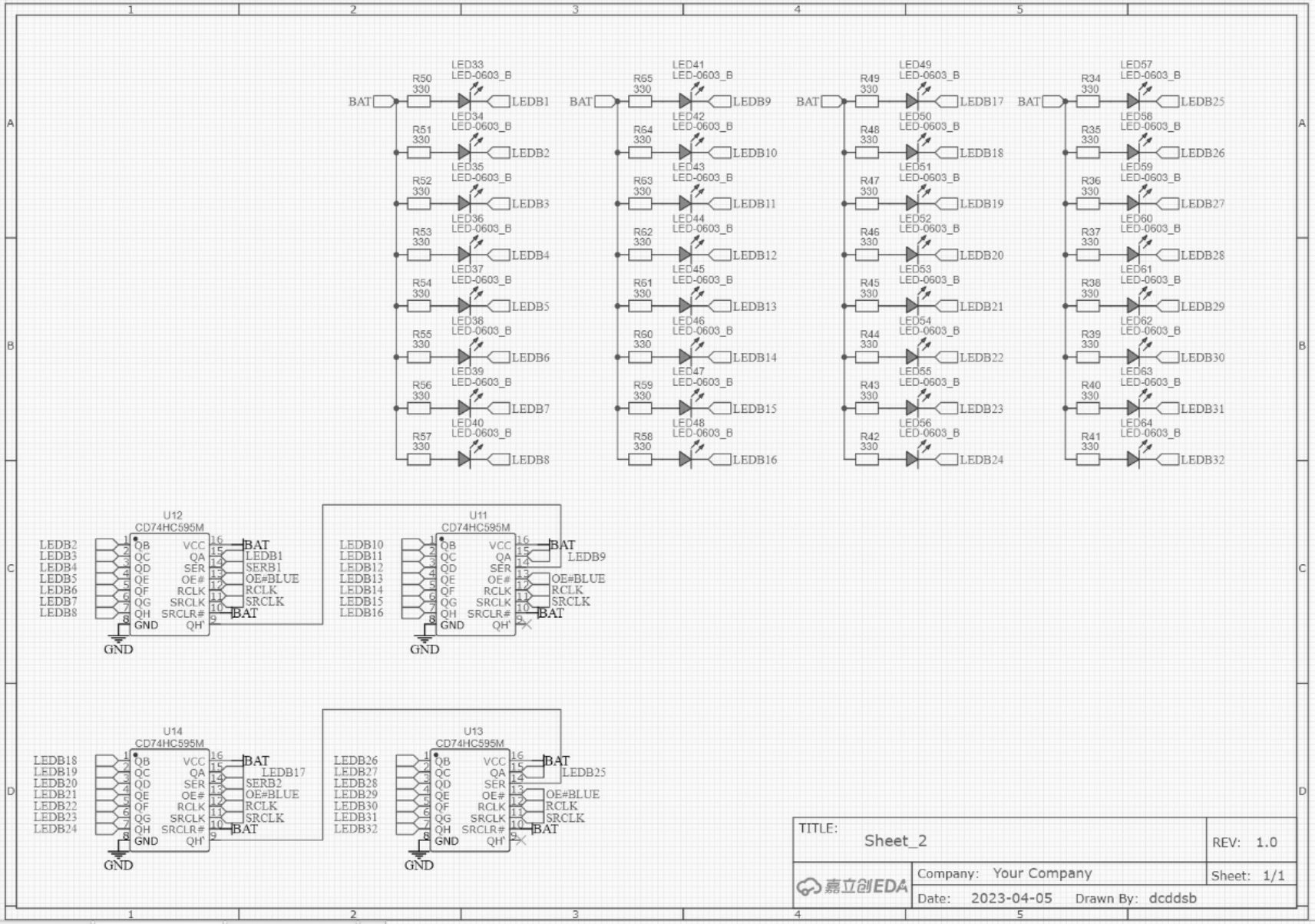
图1.5-9 副控板的电路原理图(二)
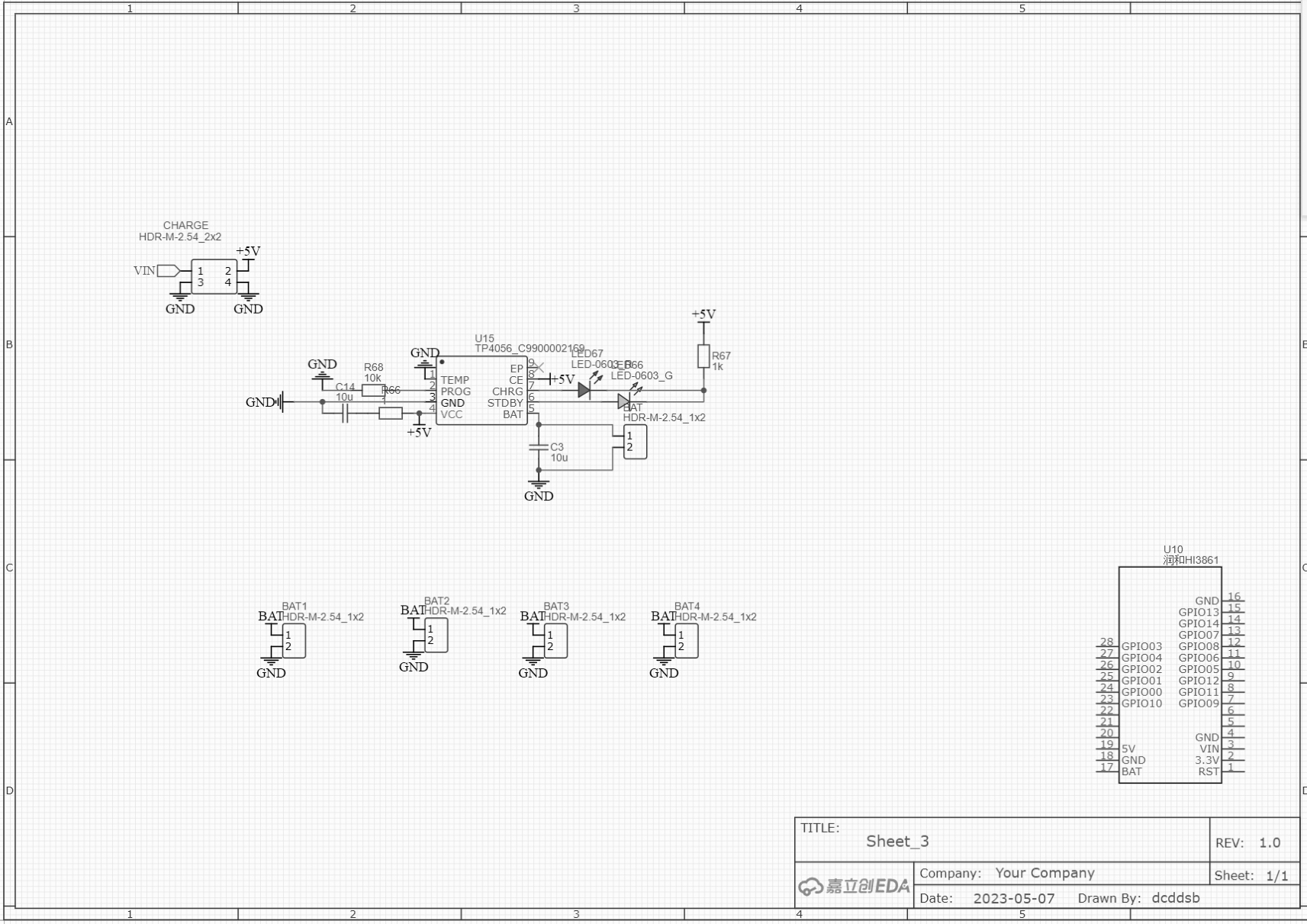
图1.5-10 副控板的电路原理图(三)
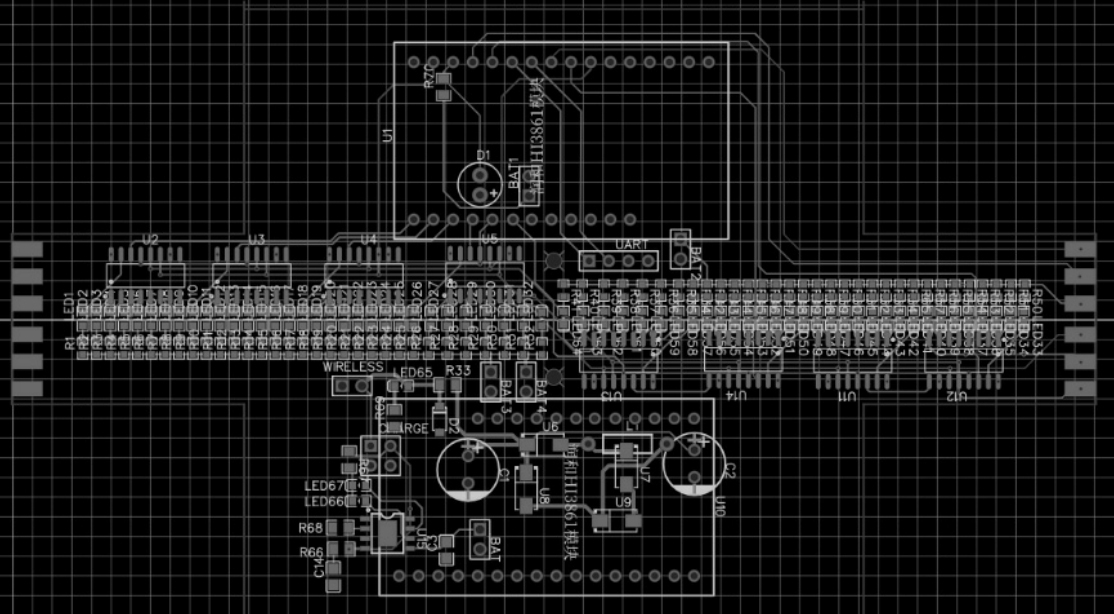
图1.5-11 副控板的布局布线图
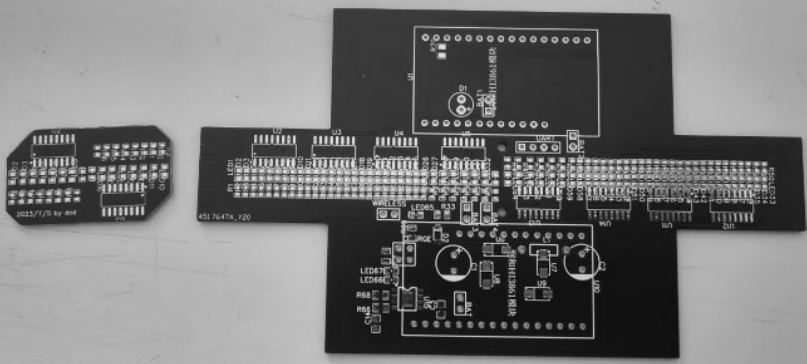
图1.5-12 副控板PCB
③无线充电模块。本作品采用TP5100锂电池充电模块对2S锂电池进行充电,TP5100模块的电能来自无线充电插座上的无线充电模块,该模块可采用DC 12 V的电源进行充电,或者使用3S锂电池进行充电。无线充电模块如图1.5-13所示。
④PCA9555模块。本作品采用PCA9555模块对IO接口进行了扩展,用来触发旋转LED屏幕、语音交互模块,控制电机驱动方向等。PCA9555模块的布局布线图如图1.5-14所示。
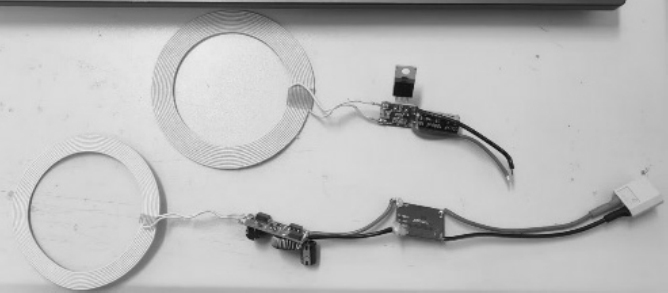
图1.5-13 无线充电模块
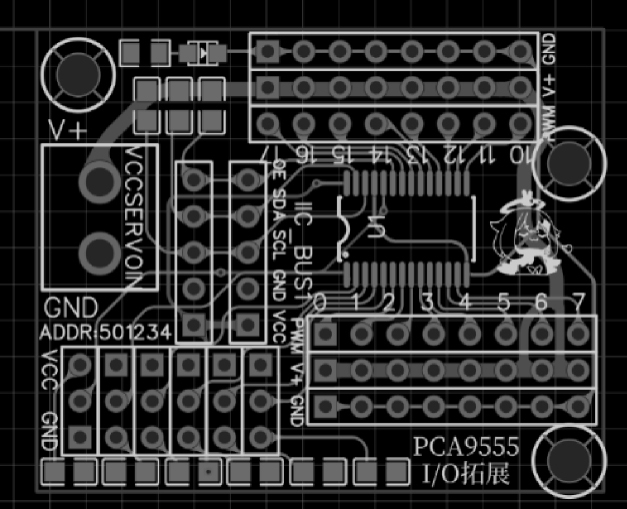
图1.5-14 PCA9555模块的布局布线图
本作品的主函数代码如图1.5-15所示。
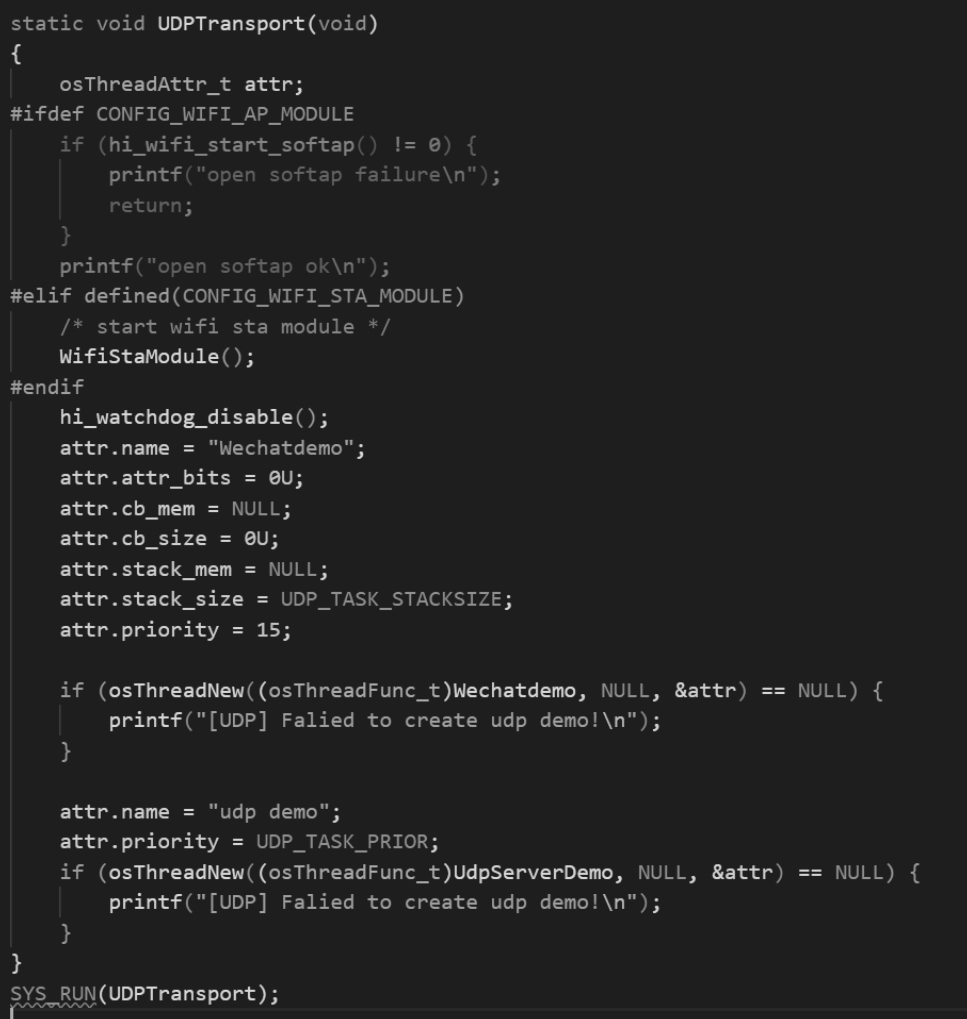
图1.5-15 主函数代码
在主函数代码中,创建了两个线程,一个负责控制球体姿态和外设通信,另一个负责与微信小程序连接并进行控制。本作品的软件功能比较简单,主要完成以下功能:
 通过串口获取陀螺仪采集的姿态角;
通过串口获取陀螺仪采集的姿态角;
根据姿态角的信息,通过串级PID算法输出控制舵机与电机的PWM信号;
与语音交互模块进行通信;
与IO拓展模块和PWM拓展模块通过I2C总线进行通信;
控制旋转LED屏幕的灯光顺序;
与微信小程序进行通信。
本作品完成了预期设计的所有功能,运行中的实物如图1.5-16所示。
(1)机械成果。本作品的机械成果如图1.5-17所示。
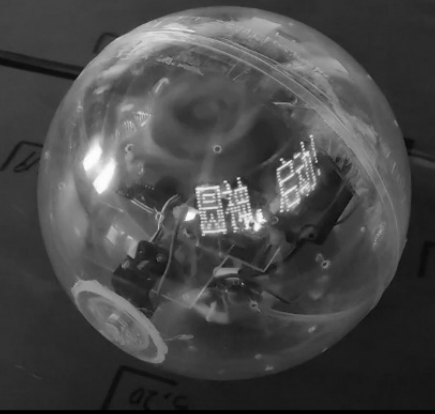
图1.5-16 运行中的实物

图1.5-17 本作品的机械成果
(2)电路成果。本作品的电路成果如图1.5-18所示。
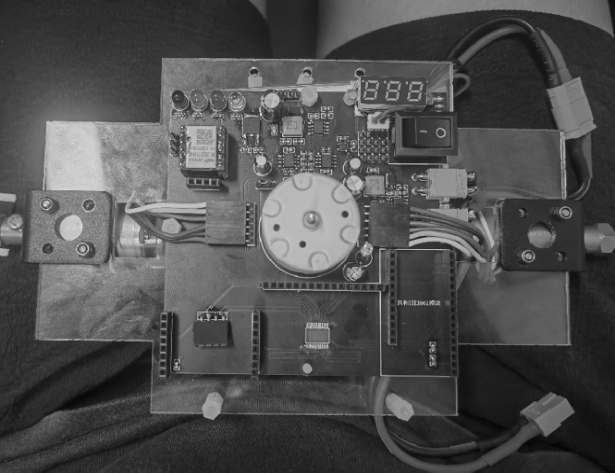
图1.5-18 本作品的电路成果
(3)软件成果。本作品的软件界面如图1.5-19所示。
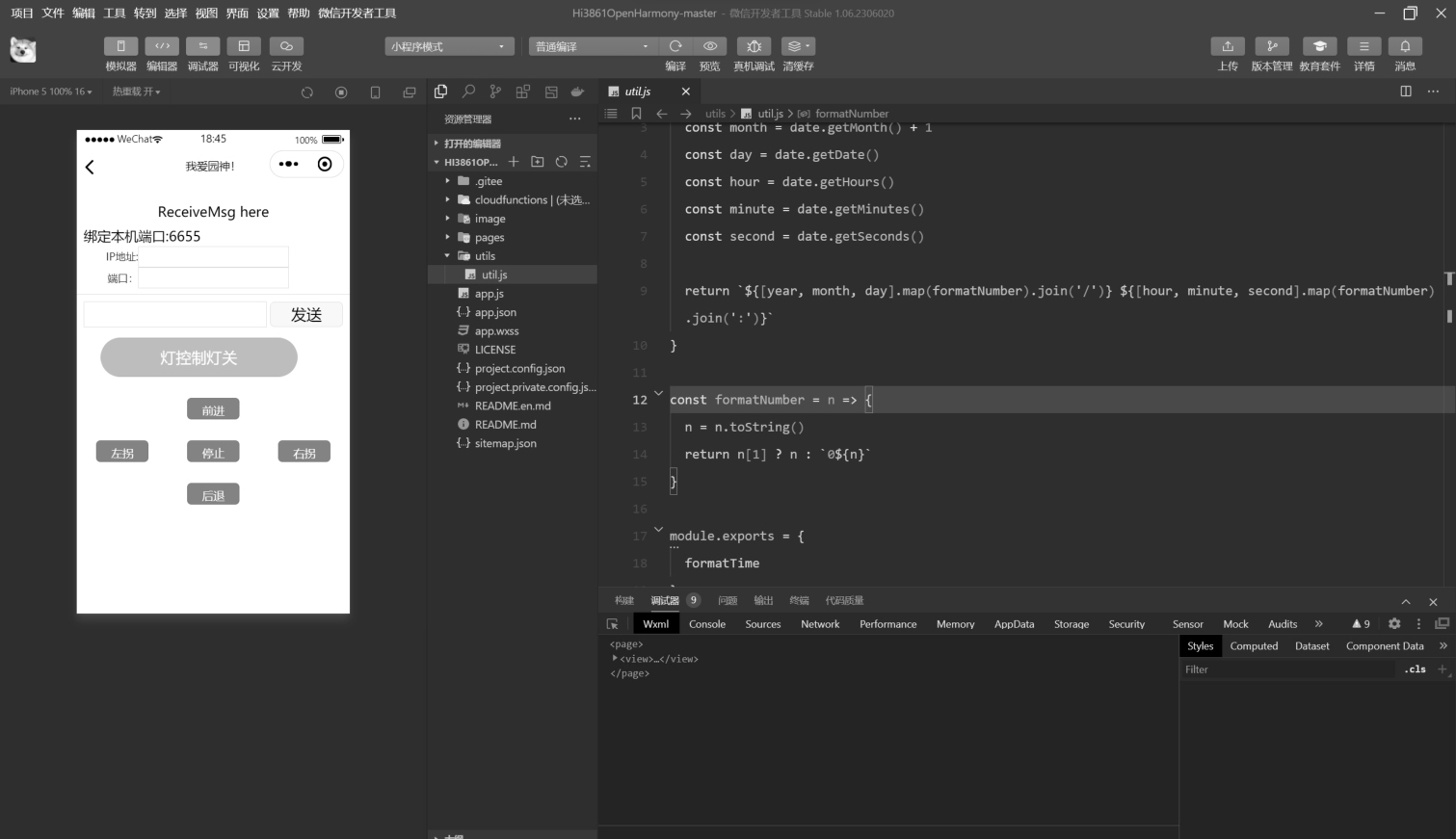
图1.5-19 本作品的软件界面
(1)通过自制的无线充电底座进行充电,如图1.5-20所示。
(2)通过语音交互模块控制本作品在室内定向巡航,如图1.5-21所示。
图1.5-20 充电工作图

图1.5-21 通过语音交互模块控制本作品在室内定向巡航
(1)进一步完善微信小程序UI,可优化得更加精美一些。
(2)可尝试采用胶粒外壳,减少运行时的磨损。
本作品是基于Hi3861实现的智慧互联球形机器人,在局域网中可以通过微信小程序连接本作品,在手机端对球体的姿态和外设进行控制。此外,也可以通过语音交互模块控制本作品,并与其进行交互。本作品内部包含独特的旋转LED屏幕,可用于展示图案、文字,为使用者提供独特的视觉、听觉及交互体验。如果条件允许,还可以利用Hi3861的Wi-Fi模块互传特点,实现多球互动、排布阵列,展示更加出彩的效果。
本作品设计了无线充电电路与有线充电插座,将球体置于制作好的模具内即可进行无线充电,也可以使用球壳内部的柔性太阳能电池板进行充电。
由于本作品具有独特的球形结构,所以具有防水、不易伤人、转向方便、外观可爱等优点,适合作为陪伴孩童玩耍的可靠伙伴,解放家长双手。其内部独特的旋转LED屏幕可以展示图案、文字,加上球体内部的语音交互模块,可以为使用者提供独特的视觉与听觉体验,不仅能够吸引孩童作为玩耍伙伴,也可以摆放在店铺门口吸引大众,起到广告、科普、吸引客流量的作用,也可以用于智能家居,作为一个炫彩时钟或者语音助手。
[1] 杨皓明,赵唯.基于串级PID控制的两轮自平衡车控制系统设计[J].电脑知识与技术,2019,15(16):288-289,292.
[2] 吴晗,徐开芸,朱昊,等.基于单片机的球形机器人控制系统设计[J].机械设计与制造工程,2018,47(11):53-57.
[3] 赵伟.面向月球应用的球形机器人的越障能力分析与研究[D].北京:北京邮电大学,2014.
[4] 郑华辉,曹建树,王魏.球形机器人自平衡运动控制算法设计与研究[J].机床与液压,2020,48(09):35-39.
[5] LIN R,LIU M,HUO J,et al.Research on modeling and motion control of a pendulous spherical robot[C].33rd Chinese Control and Decision Conference(CCDC),Kunming,China,2021.
[6] 马龙,孙汉旭,李明刚,等.质心径向可变球形机器人的设计与运动分析[J].机械工程学报,2022,58(5):44-56.
[7] LEE S,PARK S,SON H. Multi-DOFs motion platform based on spherical wheels for unmanned systems[C].13rd International Conference on Ubiquitous Robots and Ambient Intelligence(URAI),Xi'an,China,2016.
[8] SADEGHIAN R,ZAREI M,SHAHIN S,et al.Vision based control and simulation of a spherical rolling robot based on ROS and Gazebo[C].IEEE 4th International Conference on Knowledge-Based Engineering and Innovation(KBEI),Tehran,Iran,2017.
本作品采用2块海思Hi3861,结合了语音交互模块、陀螺仪模块,实现了智慧互联球形机器人,具有语音交互与播报、姿态矫正、微信小程序控制等功能。本作品的结构独特,具有很强的可玩性和可扩展性,在儿童玩具、店铺广告、智能家居等方面有很好的应用场景。本作品后续可以增加AI视觉功能,实现商业孵化,成为智能家居智能管家圆形机器人的雏形。