
下载掌阅APP,畅读海量书库
立即打开



当我们检查代码时,可以在描述的顶部添加一个<robot>标签。通过这种方式来通知系统我们正在可视化一个标记语言文件。这还允许文本编辑器突出显示文件的关键字:

<robot>标签定义了我们将要创建的机器人的名称。在这里,我们将机器人命名为pan_tilt。
如果我们查看<robot>标签定义之后的部分,可以看到pan-and-tilt机械结构中连杆和关节的定义:
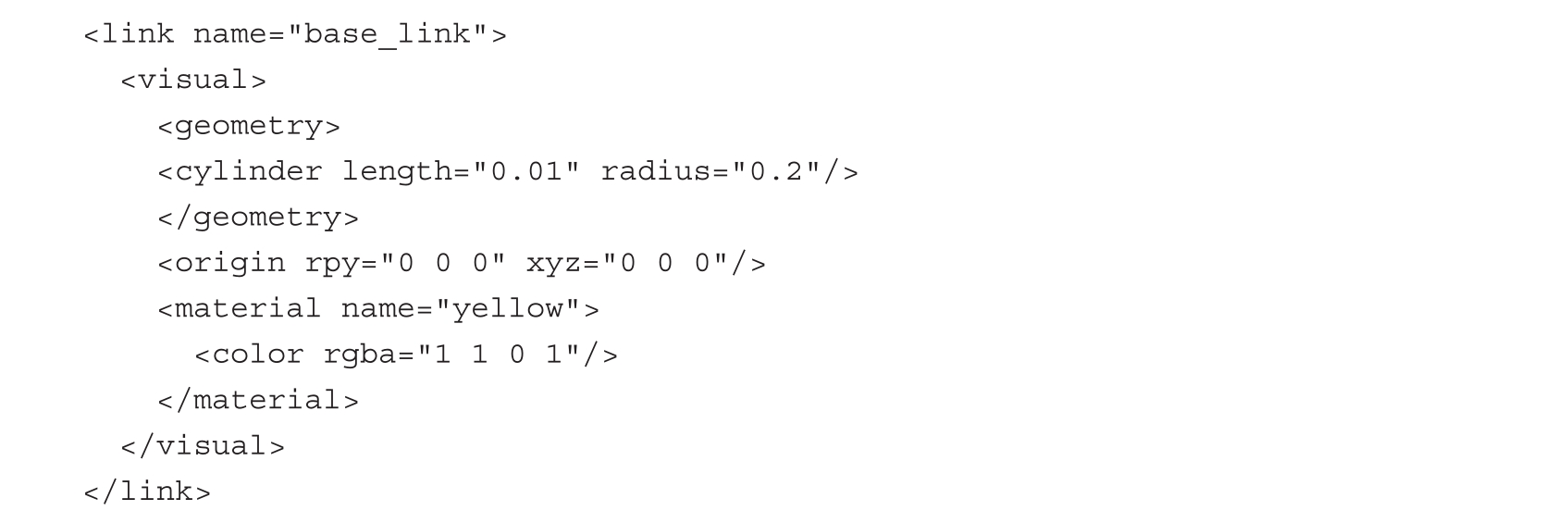
前面的这段代码是pan-and-tilt机械结构的base_link的定义。<visual>标签描述了连杆的可见外观,它将在机器人仿真中显示出来。我们可以用这个标签来定义连杆的几何形状(圆柱、立方体、球体或网格模型)以及连杆的材质(颜色和纹理):

在前面的代码片段中,我们定义了一个具有唯一名称和关节类型的关节。这里我们使用的关节类型是旋转关节(revolute),父连杆和子连杆分别是base_link和pan_link。在此标签内还指定了关节原点。
将前面的URDF代码保存为pan_tilt.urdf,并使用以下命令检查urdf是否包含错误:

要使用此命令,必须安装liburdfdom-tools软件包。读者可以使用以下命令来安装它:

check_urdf命令将解析urdf标签并显示错误(如果有的话)。如果一切正常,它将输出如下内容:

如果我们想以图形化的方式查看机器人连杆和关节的结构,我们可以使用一个名为urdf_to_graphiz的命令行工具:

这个命令将生成两个文件:pan_tilt.gv和pan_tilt.pdf。我们可以使用以下命令来查看此机器人的结构:

我们将得到如图3.5所示的输出。
利用图形可视化可以帮助我们了解机器人每个关节的位置和关系。同时,在3D浏览器中可视化设计的模型也非常有用。要做到这一点,我们可以使用RViz,详见下一节。
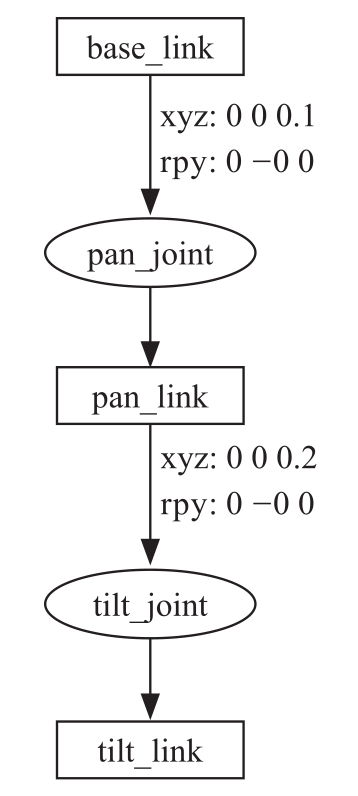
图3.5 pan-and-tilt机械结构中的关节和连杆图