
下载掌阅APP,畅读海量书库
立即打开



反馈是被动的,即在校正起作用之前必须先有误差。但是,在有些场合,可以在干扰对系统产生影响之前对其进行测量,利用测得的干扰信息来产生校正作用。因此,通过测量干扰并产生一个抵消干扰的控制信号,就可以减小干扰的影响,这种方法叫作 前馈 (feedforward)。由于命令信号作为控制系统的外部输入总是确定的,因此在对命令信号的响应进行整形时,前馈特别有用。由于前馈试图匹配命令和输出这两个信号,因此它要求有良好的过程模型;否则,校正作用的程度或时间可能出现错误。
图1.3所示为反馈系统和前馈系统的对比。这两个图中都有参考信号 r (描述了过程 P 的期望输出)以及外部干扰信号 v 。在反馈系统中,测量的是系统的输出 y ,控制器 C 则调整过程的输入,试图使过程的输出保持为期望的参考值。在前馈系统中,测量的则是参考信号 r 和干扰 v ,并算出一个过程输入,以产生期望的输出。请注意,反馈系统不直接测量干扰信号 v ,前馈系统则不直接测量系统的输出 y 。
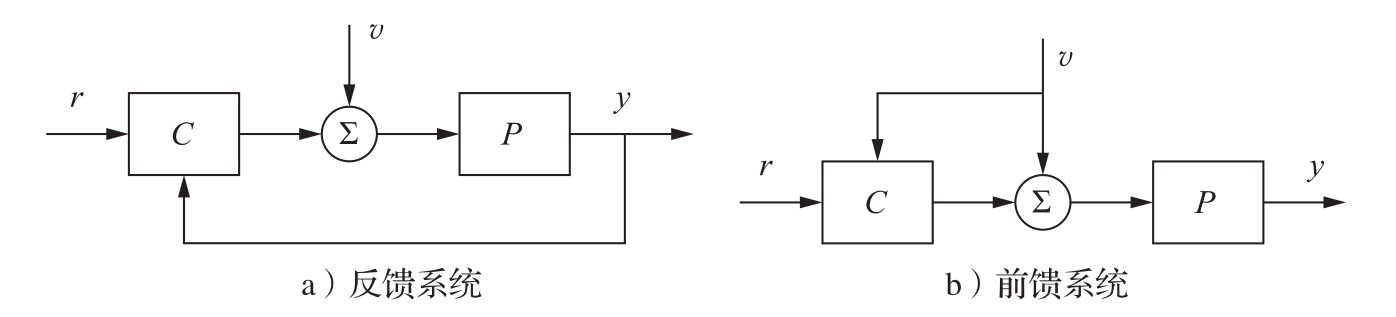
图1.3 反馈系统和前馈系统的对比。两个系统中都有过程 P 和控制器 C 。在图a的反馈系统中,通过测量输出 y 来确定干扰 v 的影响,而在图b的前馈系统中,却是直接测量干扰,不直接测量过程的输出
反馈和前馈的应用领域非常广泛。在经济学中,反馈和前馈对应于市场经济和计划经济。在商业中,基于广泛的战略规划来经营公司的做法属于前馈策略,而基于反应式方法来经营公司则属于反馈策略。在生物学中,当人们接受运动协调性训练时,前馈被认为是人体运动控制的一个基本要素。经验表明,将反馈和前馈结合起来往往是有益的,二者间的合理平衡则有赖于人们对它们各自特性的洞察和理解。表1.1总结了反馈和前馈的特性。
表1.1 反馈和前馈的特性
