
下载掌阅APP,畅读海量书库
立即打开



梳理我们对任何生物的理解的一个好办法是,想象“它”(如果你愿意,可以为这些生物安排一个假想中的“设计者”)面临一系列的问题或任务。首先,我们提出最初的问题,然后考虑可能有意义的解决方案,然后再看看这些生物到底是怎么做的。通常我们会注意到,这类动物将因此面临一个新问题,且这一模式将循环往复。我在《盲眼钟表匠》的第二章中叙述蝙蝠和它们复杂的回声测距技术时就是这样做的。在本章关于蜘蛛网的叙述中,我也将沿用同样的策略。请注意,一个问题导致另一个问题的进展过程不能被认为仅贯穿某只动物的一生。如果它是一个纯粹时间的进展,那其在时间尺度上是遵循演化的,但有时它可能不是一个时间的进展,而是一个逻辑的进展。
现在,我们的基本任务是找到一种有效捕虫以果腹的方法。一种解决方案可能是快速飞行。像猎物一样飞向天空,在快速飞行的过程中张开嘴,用敏锐的眼睛精确瞄准猎物后一口叼住。这种方法适用于雨燕和家燕,但需要在高速飞行、机动设备,以及高科技制导系统上进行代价高昂的投资。蝙蝠的解决方案也是如此,不过其在夜间使用回声代替光线来进行制导。
另一种完全不同的可能性来自“守株待兔”式的解决方案。螳螂、变色龙和某些蜥蜴在这方面经历了独立演化和趋同,它们解决这一问题的方式可以变色龙为例,即高度伪装,并以极具耐心的、缓慢隐蔽的方式移动,直到最后关头暴起,用前肢或舌头以迅雷不及掩耳之势捕获猎物。变色龙的舌头使它能够在与自身身长相当的半径范围内捕捉苍蝇。螳螂臂伸展后的可及范围若按身体比例而论,也与变色龙相仿。你可能会认为这种设计可以通过进一步延长捕获半径来加以改进,但是比身体长度长得多的舌头和前肢的构造成本和维护成本太高了:它们因改进而捕获的额外苍蝇不足以补偿对其加以改进而付出的代价。我们能否构想出一种更廉价的方式来扩大捕获“范围”或半径呢?
既然如此,为什么不织一张网呢?网的构建必然需要用到一些材料,而且不是凭空得来。但与变色龙的舌头不同的是,网不需要移动,所以不需要庞大的肌肉组织。它可以像游丝一样纤细,因此可以以低成本纺出并覆盖更大的区域。如果你将原本为构建肌肉发达的前肢或舌头而消耗的肉类蛋白质重新加工成丝,以此织就的网就可以延伸到很大的范围,比变色龙的舌头所及更远。蛛网的面积可以达到蜘蛛躯体的100倍,但只需相当经济地利用蜘蛛体内微小腺体的分泌物即可实现。
在节肢动物(动物界的主要分支,昆虫和蜘蛛均可被归入其中)中,丝被广泛使用。枯枝毛虫用一根细线把自己绑在树上。织叶蚁用幼虫吐出的丝将树叶缝在一起,幼虫就像活的梭子一样被工蚁夹在颚中(图2.1)。许多毛虫在羽化成有翅膀的成虫之前,都会把自己包裹在丝制茧里。天幕毛虫用丝结出的网幕可以把树闷死。一只家蚕结茧时能吐丝近一英里。不过,虽然蚕是人类丝绸工业的基础,但实际上,蜘蛛才是动物王国中技艺最为精湛的产丝动物,而令人惊讶的是,人类竟然没有更大规模地应用蜘蛛丝,它只被用来制作显微镜上精确的十字准线。动物学家兼艺术家乔纳森·金顿(Jonathan Kingdon)在他的佳作《自我塑造的人》( Self-Made Man )中推测,蜘蛛丝可能启发人类孩子发明了我们最重要的技术之一——绳子。连鸟类也认识到蜘蛛丝作为一种材料品质优良:已知165种鸟类(分属23个独立的科,这表明蜘蛛丝的用法已被多次独立发现)将蜘蛛丝纳入它们的巢穴构建材料中。典型的圆网蛛十字园蛛( Araneus diadematus ) [1] 可从它的尾部喷嘴中吐出6种不同的丝,这些丝是在它腹部的不同腺体中产生的,它会根据不同的目的在不同类型的丝之间切换。早在蜘蛛演化出织网能力之前,它们就已经在使用丝了。即使是从不结网的跳蛛,在跳向空中时也会系上一根丝制的安全线,就像登山者用绳子把自己拴在最近的安全立足点上一样。
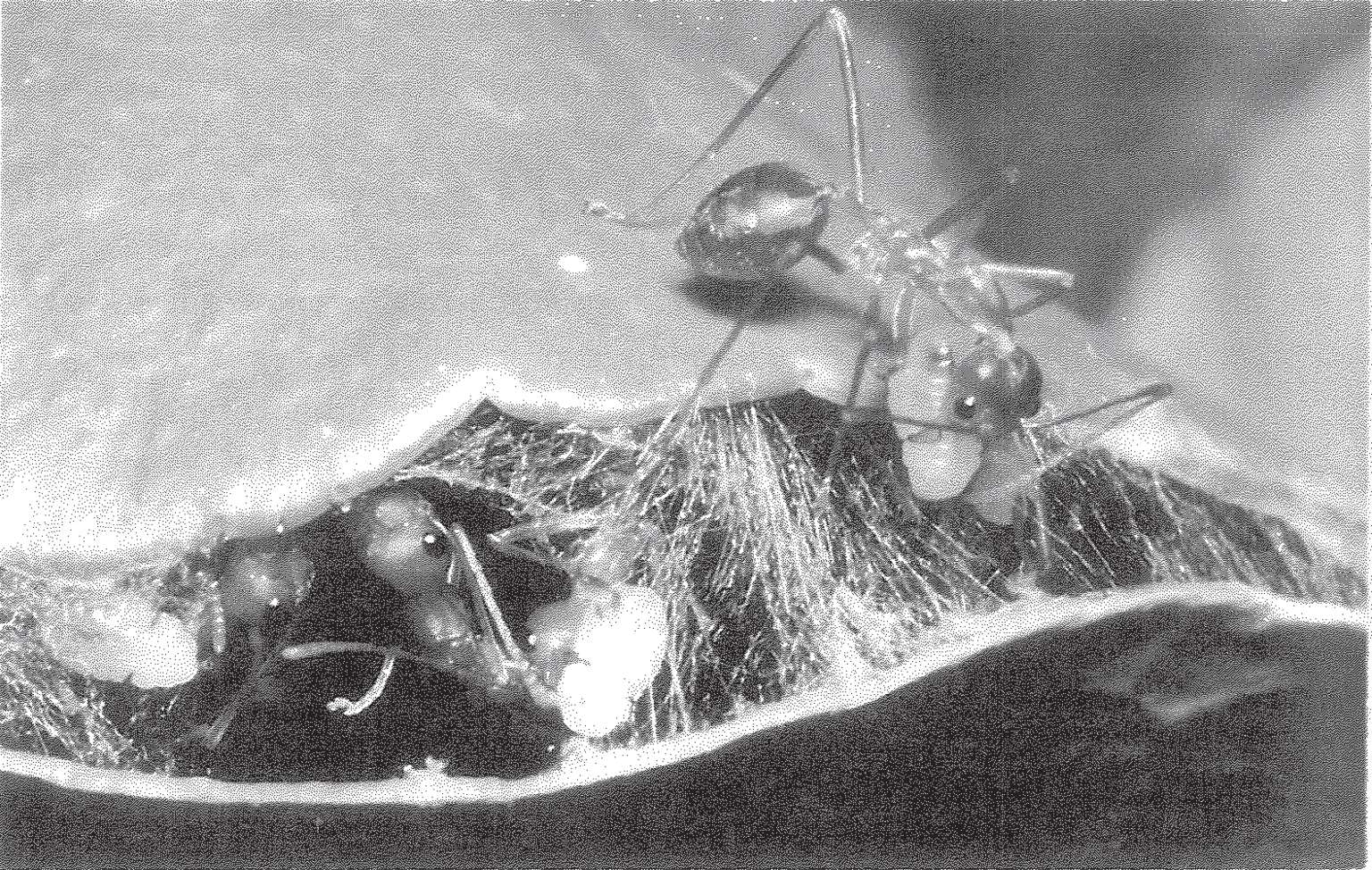
图2.1 大自然中的纺丝工。来自澳大利亚的一种织叶蚁,黄猄蚁( Oeco - phylla smaragdina ),它将幼虫用作活的织布梭。
所以说,在蜘蛛的“工具箱”中,丝线其实早已有之,而它特别适合编织捕虫网。我们可以把网想象成一种令蜘蛛即刻现身于多处的手段。就体型而言,我们可以把蜘蛛比作一只有着鲸口般大嘴的燕子,或者一只有着50英尺长的舌头的变色龙。蛛网极其经济。变色龙肌肉发达的舌头肯定占了其总体重的很大一部分,但蛛网中的丝的重量(一张网所用丝的总长度可达20米)还不到蜘蛛身体重量的千分之一。此外,蜘蛛在用完蛛丝后会吃掉这些蛛丝来循环利用,所以被浪费的蛛丝很少。但是,织网手段本身也带来了问题。
对于坐镇蛛网中的蜘蛛来说,一个重要的问题是确保猎物在冲进蛛网后被粘在那里。这个过程存在两种风险。这只昆虫可能轻易地撕破蛛网,然后直穿过去。这个问题可以通过让蛛丝变得非常有弹性来解决,但这又加剧了第二个风险:昆虫现在会像跳上蹦床一样,直接从蛛丝上弹回去。这种情况下,理想的丝,化学领域研究人员梦寐以求的纤维,应该可以有很强的延伸性,以吸收快速飞行的昆虫带来的冲击;但同时,为了避免蹦床效应,在回弹时应该有所缓冲。现任职于丹麦奥胡斯大学的弗里茨·沃尔拉特(Fritz Vollrath)教授在其任职于牛津大学期间,曾与同事一同阐明,由于蛛丝本身结构非常复杂,因此至少有一些蛛丝确实具备上述特性。图2.2和图2.3中放大的蛛丝实际上比看起来的要长得多,因为它大部分收卷在水滴状微珠中。它就像一条项链,串珠里还缠绕着多余的线。这种收卷是由一种尚未完全了解的机制完成的,但其结果是毋庸置疑的。蛛丝可以伸展到静止长度的10倍,而且其回弹速度也足够慢,不至于把猎物弹出蛛网。
为了防止猎物逃跑,蛛丝需要的另一个特征是黏性。在我们刚刚讨论的缫丝系统中,包裹在丝上的物质不仅仅是水。丝很黏,只要一碰,昆虫就很难逃脱。但并不是所有的蜘蛛都以同样的方式让蛛丝获得黏性。筛器类蜘蛛从一种叫作筛器(cribellum)的特殊吐丝器官中产生多股丝。然后,蜘蛛通过装于其腿节的特制梳子(栉器)将多股蛛丝梳理出来。以这种方式“纺出”的多股丝会在表面膨出一团乱麻的缠结效果(图2.4)。这种缠结小到肉眼不可见,但正好可以勾住昆虫的腿。这种经过梳理的“筛器”丝如同有黏性,只是获得黏性的方式不同。从某方面来看,筛器类蜘蛛有一个优势。它们的丝保持黏性的时间更长。那些不对丝进行梳理而是使用黏性“胶水”的蜘蛛每天早上都要重新编织它们的黏性网。诚然它们完成这个工作可能只需不到1个小时,速度之快几乎令人难以置信,但当你面对自然选择时,每一分钟都至关重要。
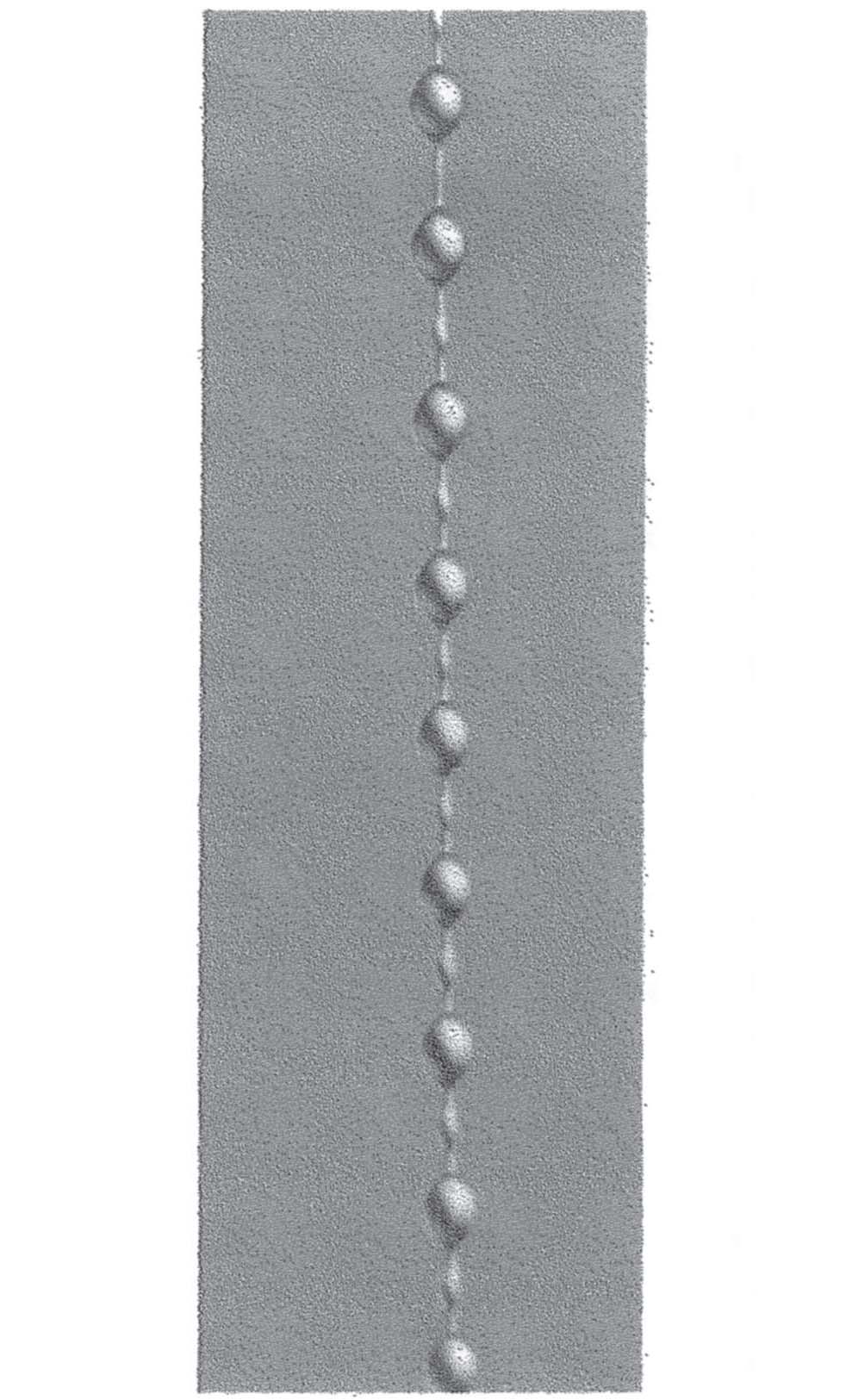
图2.2 沿着蛛网的丝线分布的微珠。
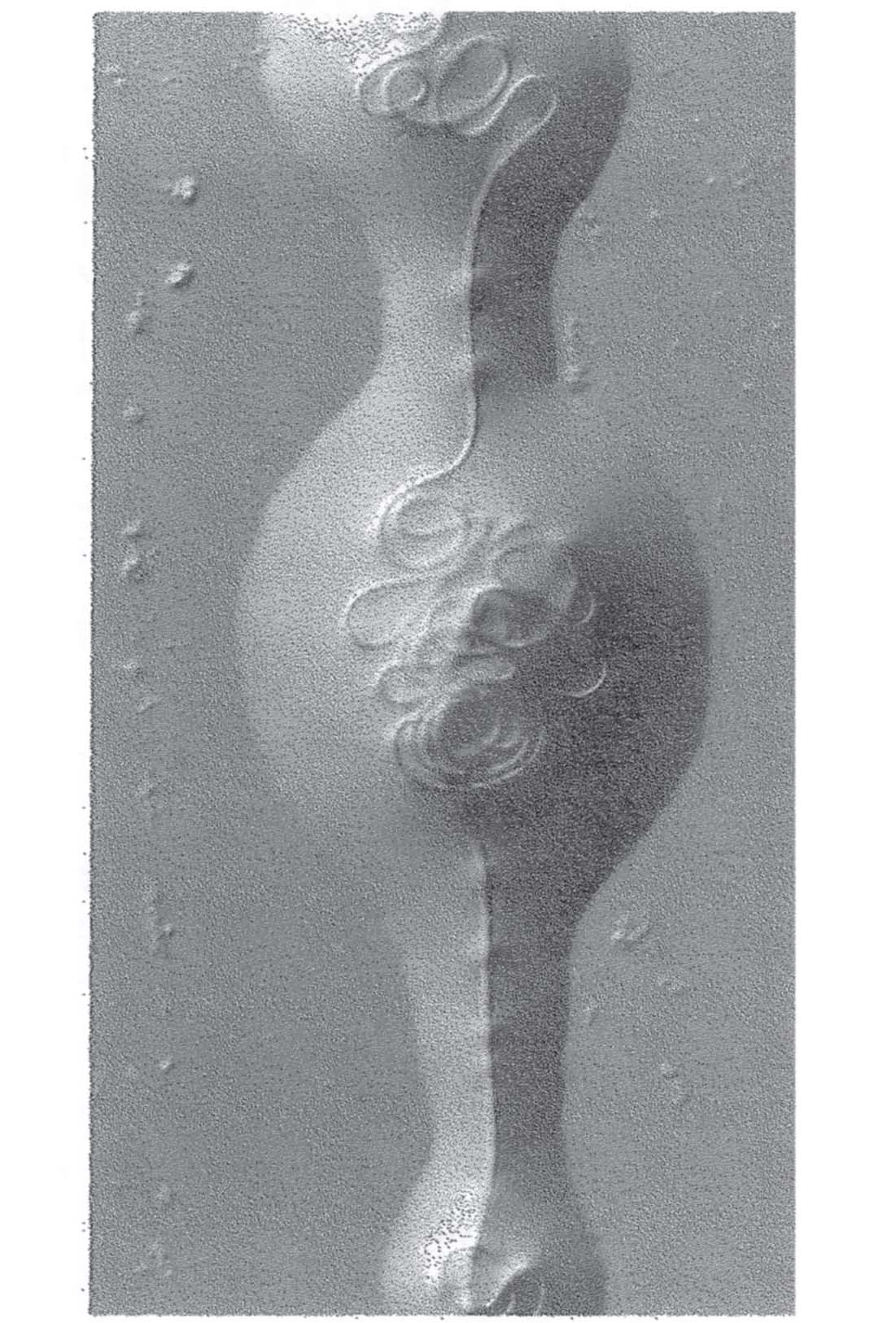
图2.3 其中一个微珠放大后可见内部盘绕着的丝线,就像一个“绞盘”。
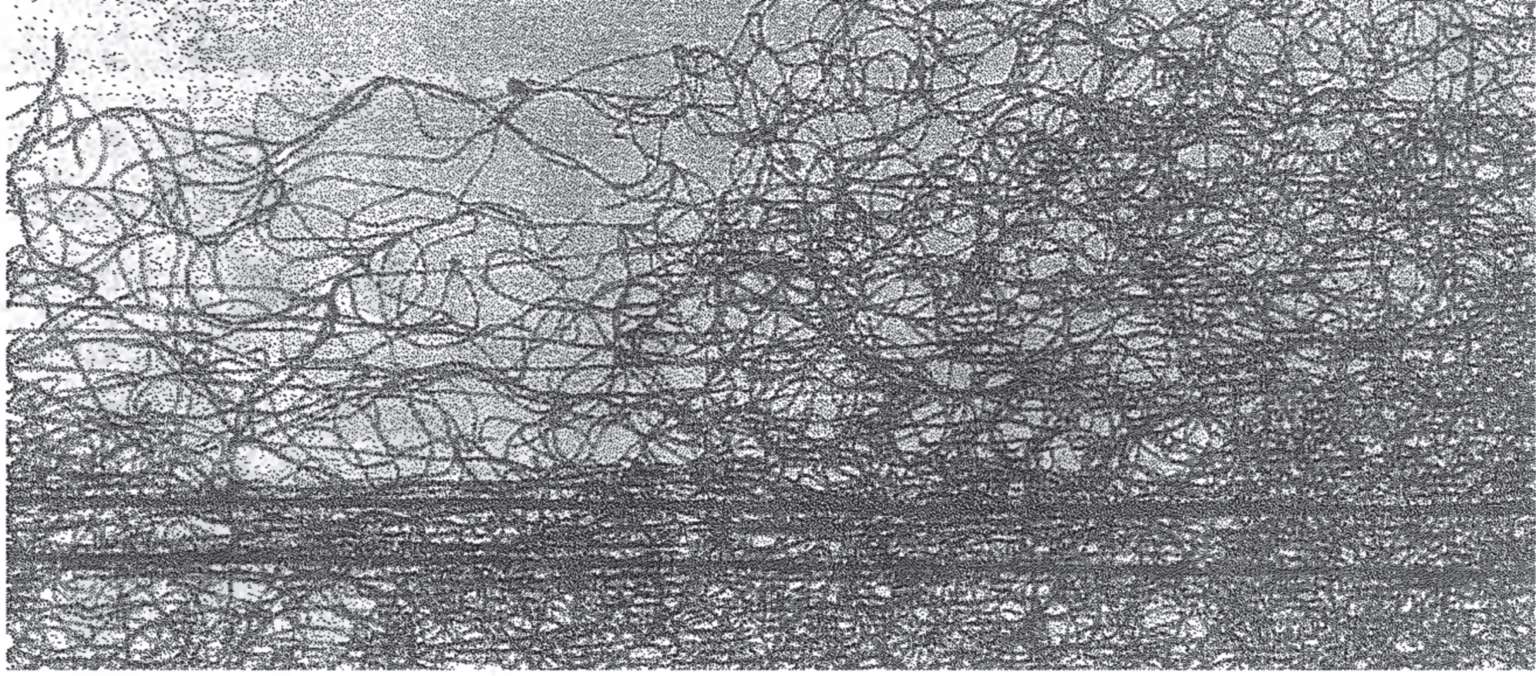
图2.4 另一种使网具有黏性的方法:筛器类蜘蛛“纺出”的丝。
但现在,黏性丝线带来了一个极具讽刺意味的新问题。无论是涂上“胶水”还是将其纺成一团,足以诱捕昆虫的黏性丝线对蜘蛛自己来说也会很棘手。蜘蛛并没有对这种黏性产生神奇的免疫力,但其已经借助演化手段给出了各种不完全有效但也多少有些效用的解决办法,以避免自己被自己的网粘住。那些使用“胶水网”的蜘蛛在自己的足上涂了一种特殊的油,以防止被粘住。我们已经通过将蜘蛛的足浸在乙醚中证明了这一点,乙醚会去掉油性保护层,令蜘蛛失去这种保护。蜘蛛采用的第二个解决方案是使一些丝——从网的中心向外辐射的主辐——不具黏性。蜘蛛自己只在这些主辐上来回走动,她用经过特别修饰的足末端的小爪抓住细丝。(雄性蜘蛛也结网。对这种叙述方式的解释,请参见第44页。)她会避开在这些辐条构筑的脚手架上绕来绕去的黏性螺旋状丝线。这很容易做到,因为她通常就端坐于蛛网的中心等待猎物落网,所以到网络上任何一点的最短距离都是沿着这些辐条前进。
现在,让我们来看看蜘蛛在织网时所面临的一系列问题。并不是所有的蜘蛛都遇到同样的问题,在这里,我将以我们熟悉的十字园蛛为代表。我们——或者说蜘蛛——最初遇到的问题是如何让第一根丝穿过网所要横跨的距离,比如一棵树和一块石头之间的缝隙。一旦至关重要的第一根丝成功跨越了这个缝隙,蜘蛛就可以将其作为桥梁来构建剩下的。但是如何建造第一座桥呢?有一种步行搭建方式是拖着一根丝向下爬,在地上绕一圈,然后再爬高到另一端。蜘蛛有时会这样做,但有没有更具想象力的解决方案呢?我们也许有过放风筝的经历,那为什么不利用蛛丝本身轻盈的特性呢?是的。如果有足够大的风,蜘蛛便会这样做。她放出一根蛛丝,顶端是一个扁平的丝制帆或“风筝”。它能兜住风并飘浮到空中。这个风筝是有黏性的,如果它碰巧落在缝隙另一边的坚硬表面上,它就会粘在上面。如果风筝没有触到对面,蜘蛛就会把风筝拖回来,吃掉珍贵的蛛丝,然后再试着换一个新的风筝。最后,缝隙之上便架起了一座可堪一用的桥,蜘蛛只需把自己所在的那一端固定住。于是这座桥现在可供其通行了。
第一座桥不太可能是紧绷的,因为丝的长度是随机的:它不是为特定的缝隙量身定做的。蜘蛛现在要么将这根蛛丝缩短,作为网的一条边,要么把它拖长,呈V形,形成蛛网的两根主要辐条。此处存在的问题是,尽管可以将这根丝向下拉成V形,但这条V形丝不太可能下探足以形成两根长的辐条的距离。蜘蛛自己对这个问题的解决方案是不改变这座桥本身,而是把它作为支撑,并用一根新的、更长的蛛丝来代替它。她是这样做的。她站在桥的一端,从她的尾部抽出一根新的蛛丝,并牢牢地固定好。然后,她把现有的桥咬断,用足抓住切断的一端。之后她凌空跨过缝隙,在身前提供拉力的是被她咬断的最初的桥的遗留部分,在身后拉住她的则是新抽出的蛛丝。她自己就是这座桥上活生生的一个衔接点,并在桥上稳步前行。至于她已经跨过的那部分旧桥,既然已经物尽其用,她便将其吃了。她以这种惊人的方式,一边沿着旧桥向前并将其吃掉,一边在身后造出一座从一端横跨另一端的新桥。此外,她后端尾部吐丝的速度比她吃丝的速度快。因此,在精心控制的情况下,新桥会比旧桥更长。现在这座桥的两端都牢牢地固定住了,它可以垂到合适的位置,拉成V形,形成蛛网的中心。
为了做到这一点,她移动到新桥的中心,用自己的重量把这根蛛丝从一条松弛下垂的弧线拉成紧绷的V形。V形丝线的两个臂的位置很好,形成了蛛网的两个主要辐条。下一根要构架的辐条的位置是显而易见的。从V形丝线的转折处拉一根垂线是一个好主意,这样可以从下方固定住蛛网中心的位置,即使蜘蛛自身的重量不在这一点上,也能保持这条V形丝线绷紧。蜘蛛把一根新的蛛丝固定在V形丝线的尖端,然后像一根铅垂线一样把自己吊到地面或其他合适的表面上,在那里把垂直的线固定住。这样一来,蛛网的三根主要辐条现在均整齐就位了,看起来像一个Y。
接下来的两个任务是把其余的辐条从中心向外辐射出去,并搭建外围框架的边缘。蜘蛛经常巧妙地将两个任务结合起来一起完成,她运用惊人的灵巧手段,操纵两根甚至三根蛛丝,然后在沿着现有的辐条行走时将它们一一分开固定。在本章的初稿中,我详细地解释了这种如同魔法般的翻花绳技巧,但这让我感到头晕目眩。我的一位编辑也抱怨说,读这篇文章让他头晕目眩,因此我不情愿地把这段话删掉了。这一阶段结束后,蜘蛛便构建出了一个完整的轮辐,有25~30根辐条(数量因物种而异,也因个体而异),蛛网的基本骨架已经就位。但此时的蛛网仍然像自行车轮一样,大部分空间是空的,苍蝇可以直接穿过。即使苍蝇碰到了其中一根蛛丝,也不会被缠住,因为它们并不黏。现在需要的是在这些径向辐条之间填补大量横丝。想要完成这个任务,编织方式多种多样。例如,蜘蛛可以依次处理每根辐条之间的间隙,她可以从蛛网的中心到边缘,在两根辐条之间不断走之字,然后再反方向填补下一个间隙,以此类推。但这种方式需进行无数次方向的改变,而改变方向会浪费能量和时间。一个更好的解决办法是绕着整张网螺旋式行进,这便是蜘蛛通常的做法,尽管蜘蛛偶尔也会折回。
但是,无论你是之字形行进还是螺旋式行进,都会有其他问题。铺设黏丝是为了捕捉昆虫,这是一个需要精确性的作业。丝线间的空隙必须恰到好处。与径向辐条的连接必须定位巧妙,使这些辐条不至于被拉成一团糟,留下可容猎物飞过的孔洞。如果蜘蛛试图在单靠辐条本身保持平衡的情况下实现这种微妙的定位,那么它自身的重量很可能会把辐条拉断,有黏性的螺旋线就会在错误的位置以错误的张力连接在一起。此外,在网的外缘附近,辐条之间的间隙往往大到蜘蛛靠自己的足无法跨越。这两个问题的解决之道就是从蛛网中心开始螺旋向外工作。中心附近的间隙很窄,辐条也不太容易被蜘蛛的重量扭曲,因为它们相互支撑。而当你螺旋行进逐渐向外时,辐条之间的间隙必然会扩大,但没关系,因为当你开始螺旋式铺设每一个环时,之前的内环便在不断扩大的间隙之间提供了桥式支架。但这个解决思路的问题在于,用于捕捉昆虫的丝非常细,而且很有弹性,它没有办法提供太多支撑。当整个螺旋架构最终完成时,蛛网会是相当坚固的,但在施工过程中,我们面对的是一张并不完整且较为脆弱的网。
这是蜘蛛在铺设精细的捕虫用螺旋结构时会遭遇的主要问题,但不是唯一的问题。请记住,尽管向外辐射的辐条没有黏性,而且蜘蛛踩上去也没什么问题,但我们现在已经开始讨论针对猎物的黏丝的铺设。如我们先前所见,蜘蛛并不是完全不受自己网的黏性的影响。就算它们不受影响,在建造下一圈螺旋结构时,把先前的一圈当作桥梁可能会部分削弱它宝贵的黏性。因此,虽然从中心向外构建黏性螺旋结构看起来是个不错的主意,但当蜘蛛在前一圈黏性环上行走时,可能会遇到字面意义和隐含意义上的“绊子”。
这些困难难不倒蜘蛛。她的解决方案是人类建筑师可能也会想到的:临时脚手架。她确实从蛛网中心向外铺设了一个螺旋结构,但并不是用最终用于捕虫的黏丝。她首先铺设一个特殊的一次性“辅助”螺旋结构,以帮助她随后搭建黏性螺旋结构。辅助螺旋不具有黏性,它的间距比最终的黏性螺旋大得多。它不适合捕虫,但它比黏性螺旋结构更强韧。它使蛛网变得更为坚固并提供支撑,当蜘蛛最终开始构架真正的黏性螺旋结构时,它能让蜘蛛在辐条之间安然通行。辅助螺旋结构只需要绕网转七到八圈就能从中心到达边缘。完成后,蜘蛛便关闭了它那产生不黏蛛丝的腺体,亮出真家伙:专门分泌致命黏丝的腺体。她沿着从边缘到中心的螺旋路径反方向编织,比由内向外移动时的步幅更紧密、更均匀。这时,辅助螺旋结构不仅被用作脚手架和支撑,而且也可作为视觉(实际上是触觉)指引。铺设黏性螺旋结构的时候,她会在每个阶段完成后切断相应的辅助螺旋结构。随着她跨过每根辐条,更细致且带有黏性的新螺旋结构便被小心翼翼地连接,通常这种连接十分巧妙,让人联想起铁丝网或渔网。顺便说一下,临时搭建的脚手架并不会浪费蛛丝,因为这些蛛丝仍然附着在辐条上,以后会被蜘蛛吃掉。当蜘蛛最终拆除蛛网时,剩下的蛛丝也会被吃掉。她不会在铺设黏性螺旋结构时立即吃掉这些辅助丝,大概是因为从辐条上找出单根断丝会浪费时间。
当蜘蛛螺旋式行进到蛛网中心时,网就完成了。此时还需要对网的张力进行一些调整:这是一项需要熟练技术和精确性的工作,就像给弦乐器调音一样。蜘蛛会立于网的中心,用足轻轻地拉动蛛网,感受蛛网的张力,做一些必要的加长或缩短工作,然后转身从另一个角度重复这个动作。有些蜘蛛会在蛛网中心周围编织复杂的纹路,可能这便是用来微调张力的。
提到弦乐器,我得顺便解释一下为什么这支弦乐队有点缺乏阳刚之气。在这个故事中,我将蜘蛛称为“她”,不是因为雄性蜘蛛不会织网——其会织网,甚至新生的蜘蛛也能织成微型的网——而是因为雌性蜘蛛更大更显眼。雌性蜘蛛体型较大,再加上任何年龄或性别的蜘蛛都倾向于吃掉任何比自己小的移动物体,这确实给雄性蜘蛛带来了一些问题。蜘蛛是甲虫、蚂蚁、蜈蚣、蟾蜍、蜥蜴、鼩鼱和许多鸟类的食物。有一大类群的黄蜂专门捕捉蜘蛛,并将它们喂给自己的幼虫。但蜘蛛最主要的捕食者可能是其他蜘蛛,它们并不顾忌物种的界限。任何冒险爬上比自己更大的蜘蛛所编织出的蛛网的蜘蛛都会有致命危险,但这是雄性蜘蛛必须面对的危险,如果他想要完成他必须完成的任务——交配——的话。
雄蛛如何应对这个问题会因物种而异。在某些情况下,他会将苍蝇包裹在一个丝制包裹里,然后将它送给雌蛛。等到她完全沉浸于这顿苍蝇大餐之后,他才过去进行交配。没有苍蝇包裹的雄蛛可能会被吃掉。另一方面,雄蛛有时会给雌蛛一个空包裹,或者在交配完成后从她的嘴里抢走食物并潜逃,也许是为了将这些食物送给另一只雌蛛。在另一些物种中,雄蛛则仰仗一个事实:在蜘蛛蜕皮之后,新壳变硬之前,她或多或少是没有防御能力的。而此时正是雄蛛寻求交配的最佳时机,而且有几种蜘蛛的唯一交配时机就是在雌蛛蜕皮后,此时雌蛛较为柔软、顺从,或者至少是解除了武装。
其他蜘蛛物种使用一种更引人入胜的手段,为此我得离题多说两句。结网蜘蛛生活在一个充满张力的世界里。其蛛丝就像额外的肢体、探索的触角,几乎相当于眼睛和耳朵。它通过一种包含紧张和放松、伸展和松弛的改变张力平衡的语言来感知事件。雌蛛的心弦便如同绷紧的顺滑蛛丝一样。如果雄蛛想向雌蛛求爱,并避免或至少推迟被后者吃掉,他最好学会拨弄那些丝线。即使是俄耳甫斯,恐怕也没有比这更好的奏乐理由。在某些情况下,雄蛛会站在雌蛛的蛛网边缘,像拨动竖琴琴弦一样拨动网(图2.5)。这种有节奏的拨弦声是任何昆虫猎物都不会发出的,似乎是为了安抚雌蛛。在许多物种中,雄蛛还通过将自己的一根特殊的“交配丝”附着在雌蛛的网上来拉开他与雌蛛蛛网的距离。他拨动这根特殊的弦,就像爵士乐手拨动单弦茶箱贝斯。振动沿着交配丝传播,并在雌蛛蛛网的周围产生共鸣。
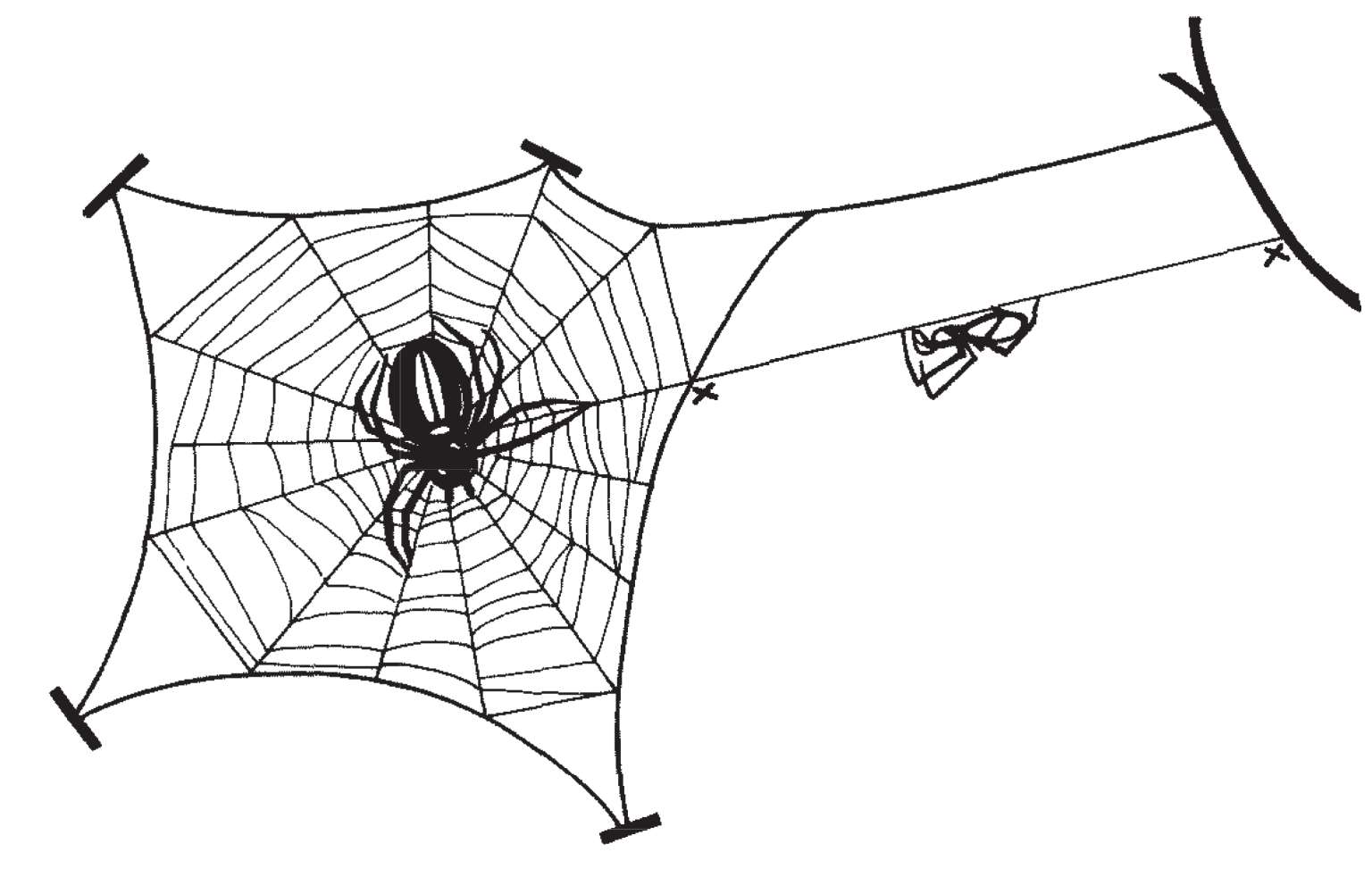
图2.5 慎之又慎:雄蛛将交配丝系在雌蛛的网上。
这种共鸣抑制或延迟了雌蛛正常的进食冲动,并诱使雌蛛沿着交配丝走向拨弦声的来源,并在那里完成交配。这个故事的结局对雄蛛那速朽的肉体来说未必总是幸事,但他不朽的基因现在已经安全地潜入了雌蛛的体内。世界上有很多蜘蛛的雄性祖先在交配后死亡。但如果雄性祖先在一开始因为爱惜己身而不曾交配,那这世界上便将没有蜘蛛。
在结束这场对性与蛛丝的讨论之前,不妨再看看下面的故事。有些蜘蛛物种,其雄蛛在与雌蛛交配之前,会将雌蛛像格列佛在小人国遭遇的那样用蛛丝绑住(图2.6)。人们很容易猜测,他是利用雌蛛的性冲动暂时抑制了她的捕食本能,从而把她绑住,这样当她的进食欲望又占据上风时,他就能安然逃走了。但我所听到的版本是:雌蛛在交配后,毫不费力地挣脱束缚,独自阔步而去。也许这种仪式上的束缚是其祖先真正的束缚行为的象征性残余。也有可能,雌蛛被困的时间只要足够雄蛛抢先一步溜之大吉便可。毕竟,他不希望她永远被束缚在那儿:她必须重获自由以便产卵,否则这一连串危险动作在遗传上都只会是徒劳无功。
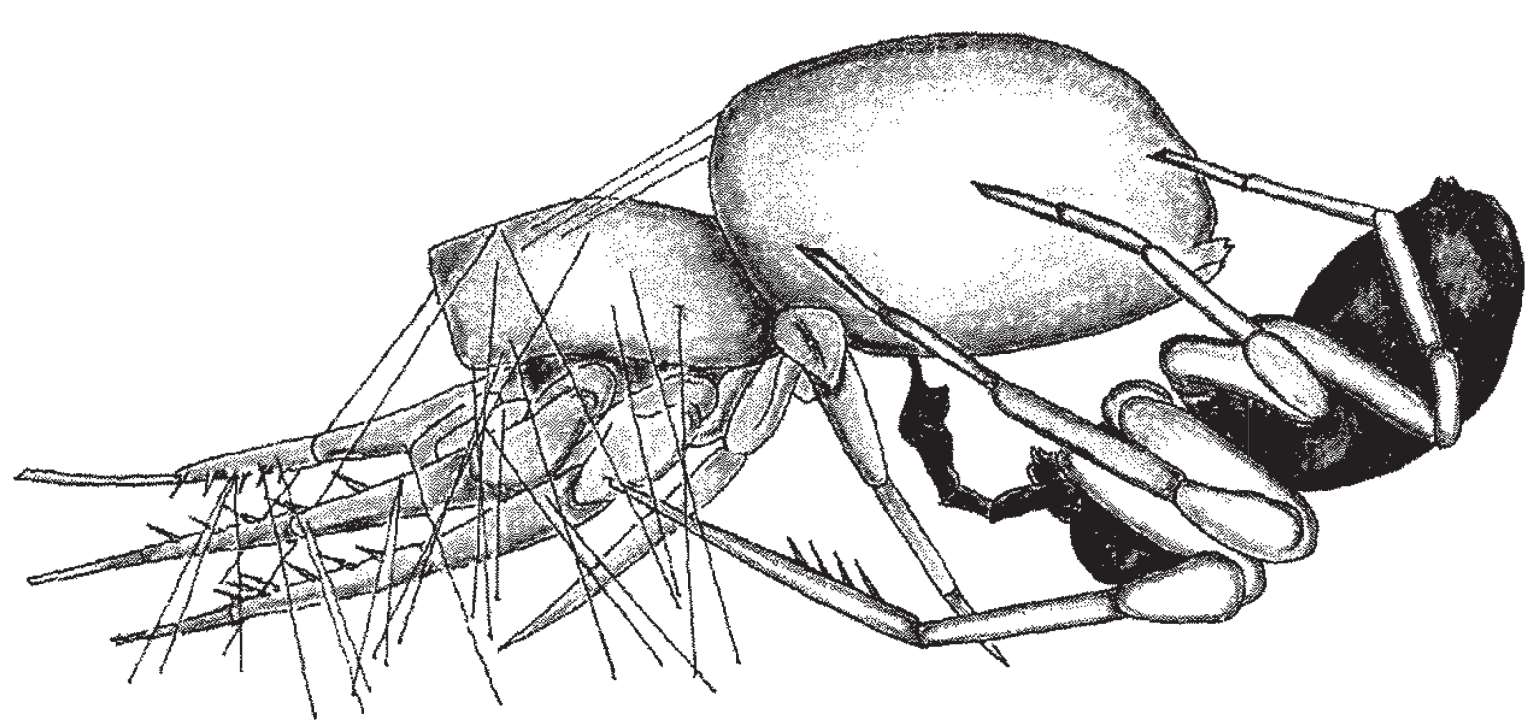
图2.6 雄蛛用蛛丝绑住体型较大的雌蛛。
现在让我们回到关于圆蛛网及其如何构建和使用的主题上。让我们暂且假设,在织网过程结束时,织网的蜘蛛会位于网的中央,专注于微调。然后我们继续罗列问题和解决方案。一张网眼足够细的网可以捕捉昆虫,但网眼太细了,会使蜘蛛自己也无法从网的一面穿行到另一面。只需简单设置“自由区”通常便可避免迂回绕行蛛网边缘的漫长路程。这往往是一圈围绕蛛网中心的无黏性螺旋蛛丝区域。在某些蜘蛛中,例如楚蛛属( Zygiella )蜘蛛,其蛛网有单个扇形区域是空的。虽然我在介绍这部分的时候,是将其当作从蛛网的一面快速行进到另一面的通道,但它的重要性可能没有你想象的那么大,因为楚蛛不像许多蜘蛛那样坐镇蛛网的中心。她踞于一个离蛛网边缘有点距离的管状藏身处,个中原因我会在探讨下一个相关问题时提及。
正如我们所见,蜘蛛本身面对其捕食者时并非无懈可击,比如它会被鸟吞食。除了在某些角度的光线下,或者在其缀满闪烁的露珠的时候,蜘蛛网本身是很难被看到的,因为蛛丝太细了。而它的建造者,雷打不动地坐在蛛网中央的蜘蛛,通常是蛛网最显眼的特征。而当你又胖又惹鸟类注目的时候,离网而栖就是一个不错的选择。但另一方面,蜘蛛的捕猎天性决定了她会长时间坐等猎物自投罗网,而蛛网中心显然是最适合坐等之处,因为它是所有不黏丝架设的主干道的交会处。这样的两难困境会导致妥协,不同的物种会选择各自的妥协方式。我们的雌性楚蛛可能会立足于蛛网外,但她也不会与蛛网中心断开连接。她通过一条特殊的信号丝保持联系,这条蛛丝从她的藏身之处一直延伸到蛛网中心。信号丝处于紧张状态,它会将振动即刻传递给在旁等待的蜘蛛。只要一有响动,她就会沿着信号丝爬到蛛网中心,然后在那里沿着任意一根主辐前往正在不断挣扎的目标的所在之处。这根信号丝位于我之前已提到过的“空白”部分的中间。让我们重新来探究一下,为什么蛛网要空开这部分呢?也许,如果这部分铺设了黏丝,就会阻碍她以迅雷不及掩耳之势冲到蛛网中心。或者,信号丝如果被与其交叉的横丝干扰,也许其传递振动信息的效率便会降低。
完全离开蛛网是楚蛛选择的妥协方式,毫无疑问,当猎物在蛛网中挣扎时,它付出的代价是到位速度多少慢了一点(如果你想知道为什么速度很重要,我们很快就会谈到这一点)。另一个折中办法是仍然让自己踞于网中心,但尽量看起来不显眼。一些蜘蛛经常会在蛛网中心铺上一层更密实的丝垫,它们可以躲在这块垫子后面,或者将自己伪装起来。有些蜘蛛网上有一条或几条特别密集的锯齿状丝带,可能会转移猎食者对潜伏在蛛网中心的蜘蛛本身的注意力(但也有人认为,这样的条纹实际上是蜘蛛微调蛛网张力所用装置的一部分)。有些蜘蛛会在网上织出额外的丝制装饰品,看起来有点像“假蜘蛛”,有人认为它们的作用是让鸟啄偏。然而,也有人提出了另一种截然不同的作用原理。这些饰品会反射紫外光(我们看不见),以至于在昆虫的眼睛里,它们可能看起来像一片蓝天,换句话说,就是一个洞。
我刚刚提到过,蜘蛛需要在昆虫被蛛网缠住时立即赶到现场。这又是何苦呢?为什么不坐等昆虫停止挣扎呢?答案是,昆虫的殊死挣扎往往是有效的。它们有时会设法挣脱蛛网,尤其是像黄蜂这样大而强壮的昆虫。即使它们没有挣脱,也会在如此尝试的过程中破坏蛛网。如何防止昆虫在被蛛网捕获后拼命挣扎,是蜘蛛要面对的下一个问题。
对此,基本的解决方案非常简单。只需根据昆虫挣扎时产生的颤动,立即冲到昆虫落网之处,将它咬死即可。如果在你寻找这只昆虫的时候,它有段时间不怎么挣扎,你可以试着通过拉扯径向的蛛丝,并根据不同蛛丝呈现的张力来感觉哪一条丝上缠住了昆虫,从而确定其位置。一旦抓到猎物,蜘蛛就会尝试对其注射致命的或麻痹性的神经毒素。大多数蜘蛛都有锋利中空的毒牙和毒腺(少数蜘蛛,比如著名的黑寡妇,对我们人类来说都是危险的,但大多数普通蜘蛛的毒牙不能穿透我们的皮肤,即使能穿透,她们也没有足够的毒素来伤害我们这样的大型动物)。一旦蜘蛛将毒牙插入猎物体内,她通常会在猎物身上停留几分钟,等待猎物停止挣扎。
我将分泌毒液的噬咬描述为制服不停挣扎的受害者的基本方法,但它不是唯一的方法。其他的制服方式都涉及蛛丝的使用——这也符合我们对蜘蛛的预期。在咬住猎物之前,即使受害者的肢体已经缠绕了蛛丝,大多数结网蜘蛛也会在受害者身上缠绕一些额外的丝。如果猎物像黄蜂一样危险,蜘蛛通常会把它裹在丝里,一圈一圈裹得严严实实,最后用毒牙刺穿这条白色的裹尸布,给它注入毒液。
蝴蝶和飞蛾有着巨大的、带鳞片的翅膀,这带来了一个特殊的问题。鳞片很容易脱落,如果我们触碰到一只飞蛾,我们的手指就会沾上一层由鳞片构成的细粉末。脱落的鳞片有助于飞蛾逃离蛛网,因为这些粉末似乎可以中和蛛丝的黏性。飞蛾遇到危险时,通常会折叠翅膀,落到地上。无论是出于这个原因,还是仅仅因为它们的翅膀仍然有一部分被黏住而无法飞行,当飞蛾从网中逃脱后,它通常会落向地面。这就为蜘蛛开辟了一条新的机遇之路,而一些蜘蛛已经抓住了这一机遇。
华盛顿国家动物园园长迈克尔·罗宾逊(Michael Robinson)和他的妻子芭芭拉在新几内亚的丛林里发现了一张堪称非凡的蛛网(图2.7a)。这种新几内亚的长梯蛛网本质上就是一张普通的圆蛛网,但网的下端延展成了长达1码(1码约合0.91米)的垂直条状网。蜘蛛坐镇于靠近顶端的蛛网中心。当飞蛾碰到圆蛛网时,它很有可能垂直下落。但新几内亚的梯网蜘蛛却能织出具有足够“纵深”的网,飞蛾会在上面翻滚而无法脱离。让其在蛛网上持续挣扎有助于消耗飞蛾的鳞状粉末,增加了飞蛾被留在网上的时间和概率,这足以使蜘蛛有余裕沿这个梯子爬下去,并对准猎物的要害给出致命一击。罗宾逊在新几内亚发现这一蛛网后不久,其同事威廉·埃伯哈德(William Eberhard)在哥伦比亚也发现了新大陆的对等物(图2.7b)。这架梯子是独立于新几内亚的长梯蛛网演化出来的,这一点可以从两者细节上的不同得到证明:哥伦比亚长梯蛛网的中心位于梯子的底部而不是顶部。但两者的工作方式和产生原因显然是一样的:这两个物种都专以飞蛾为食。
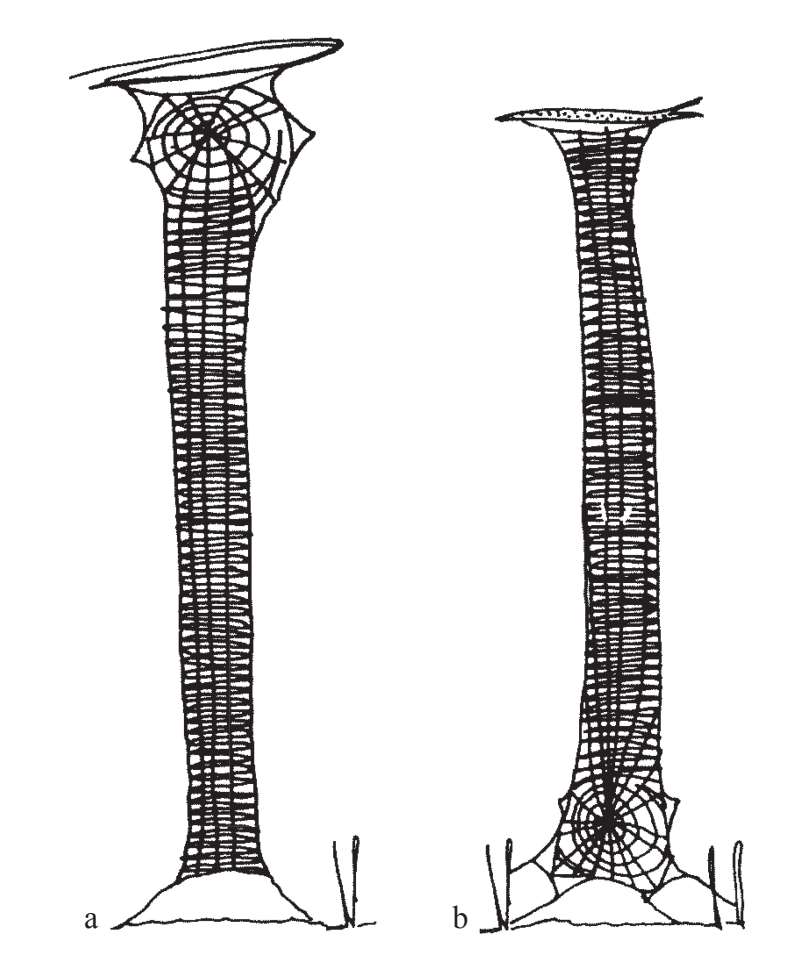
图2.7 两种各自独立演化出的长梯蛛网:(a)发现于新几内亚,(b)发现于哥伦比亚。
因此,长梯蛛网是阻止猎物逃跑的一种方法,它对飞蛾特别有效。而一些种类的蜘蛛有另一种手段——弹力陷阱。扇妩蛛属( Hyptiotes )蜘蛛的网不是完整的圆形,而是只有四根辐条的扇形。在扇形的顶点上有一根额外附加的丝,使整张网保持紧绷。但是这条重要的牵绳却不是直接连接在一个坚固物体的表面上,而是由蜘蛛抓在手中的。事实上,这只蜘蛛自己在附着于一个坚固物体的表面的过程中构成了一个活的环节。她用前足将蛛丝拉紧,然后用她的第三对足抓住身后一圈富余的蛛丝。她以危险的姿势一动不动地悬在那里静静等待着。当一只昆虫误入蛛网时,蜘蛛会立即做出反应。她松开陷阱,陷阱在昆虫身上坍塌,同时将蜘蛛拉向猎物。她还可以进一步分两到三个阶段启动陷阱,比如在身后准备更多富余的蛛丝,并在启动陷阱时松开。这只昆虫现在无可救药地被困在坍塌的网里了。蜘蛛用更多的丝将受害者包裹起来,将其像厚包裹一样带走。直到那时,她才终于咬住这个可怜的生物,注入消化液,然后沿着这个丝制包裹的壁慢慢地吸食猎物被液化的遗体。这张扇形网现在已不适合再次使用,必须从头搭建。
据推测,扇妩蛛试图以此解决一个问题,即构建张力适当的网。虽然张力强的网很适合捕捉昆虫,但在后者的激烈挣扎之下网很容易受损,昆虫可能因此逃脱。如果你是一只被黏糊糊的丝线缠住的昆虫,如果这些丝线是紧绷着的,那么相比它们的松弛状态,你会更容易借力挣脱出来。而如果这些丝线本身松松垮垮的,你就没有东西可以借力了,如此一来你就会陷在黏糊糊的丝里。就像超声速飞机起飞时的最佳机翼形态不同于快速飞行时的一样,蛛网捕捉猎物时的最佳张力也不同于将猎物缠入网中时的最佳张力。一些飞机通过对机翼形状做折中处理来解决双重最优问题:使自己在两项任务中都不会表现太差。而另一些飞机——可变翼战斗机——则通过改变机翼的几何形状得到了两全其美的效果,但这要付出构建复杂变形机制的代价。而扇妩蛛构建的是一张张力可变的网。
普通的织圆蛛网的蜘蛛似乎倾向于保持蛛网的高张力,这是最适合捕获猎物的,但猎物撞网后就得靠蜘蛛自己的速度——在猎物逃脱之前将其擒住。其他蜘蛛似乎采取了相反的解决方案,它们首先用松散的蛛丝织网(图2.8)。菱腹蛛( Pasilobus )织的也是扇形网,并用一根蛛丝将其主角平分。用于捕获的黏丝数量被大幅减少,只剩下几根松散悬吊着的挂环。这些松散挂环状丝的精妙之处在于——这是迈克尔·罗宾逊和芭芭拉·罗宾逊夫妇在新几内亚的另一个绝妙发现——它们的一端特别容易脱落。一种昆虫,如飞蛾,一旦碰到一根蛛丝并黏在上面,很快就会在特定的低剪力连接处将蛛丝弄断,但却仍然被系在蛛丝的另一端。受害者现在像一架拴在绳子上的玩具飞机一样只能绕着圈飞。对蜘蛛来说,拉住线将猎物拖上来并杀死小菜一碟。这种布局的优势可能部分在于昆虫不能自由地挣扎,因为一切都是如此松散,它无法得到一个坚实的支点。或者说,快速断开蛛丝的主要优点可能是它有助于解决我们之前列出的那个问题:如何让蛛网吸收快速飞行的昆虫对蛛网的冲击,而不会像蹦床一样将其反弹。和其他扇形网一样,菱腹蛛的网似乎很可能是一个完整的圆蛛网的缩小版衍生物。另有双刺蛛属( Poecilopachys )蜘蛛在一个完整的圆蛛网中使用相同的快速断线原理。而在这个例子中,与大多数圆蛛网不同的是,双刺蛛的网是水平的,而不是垂直的。
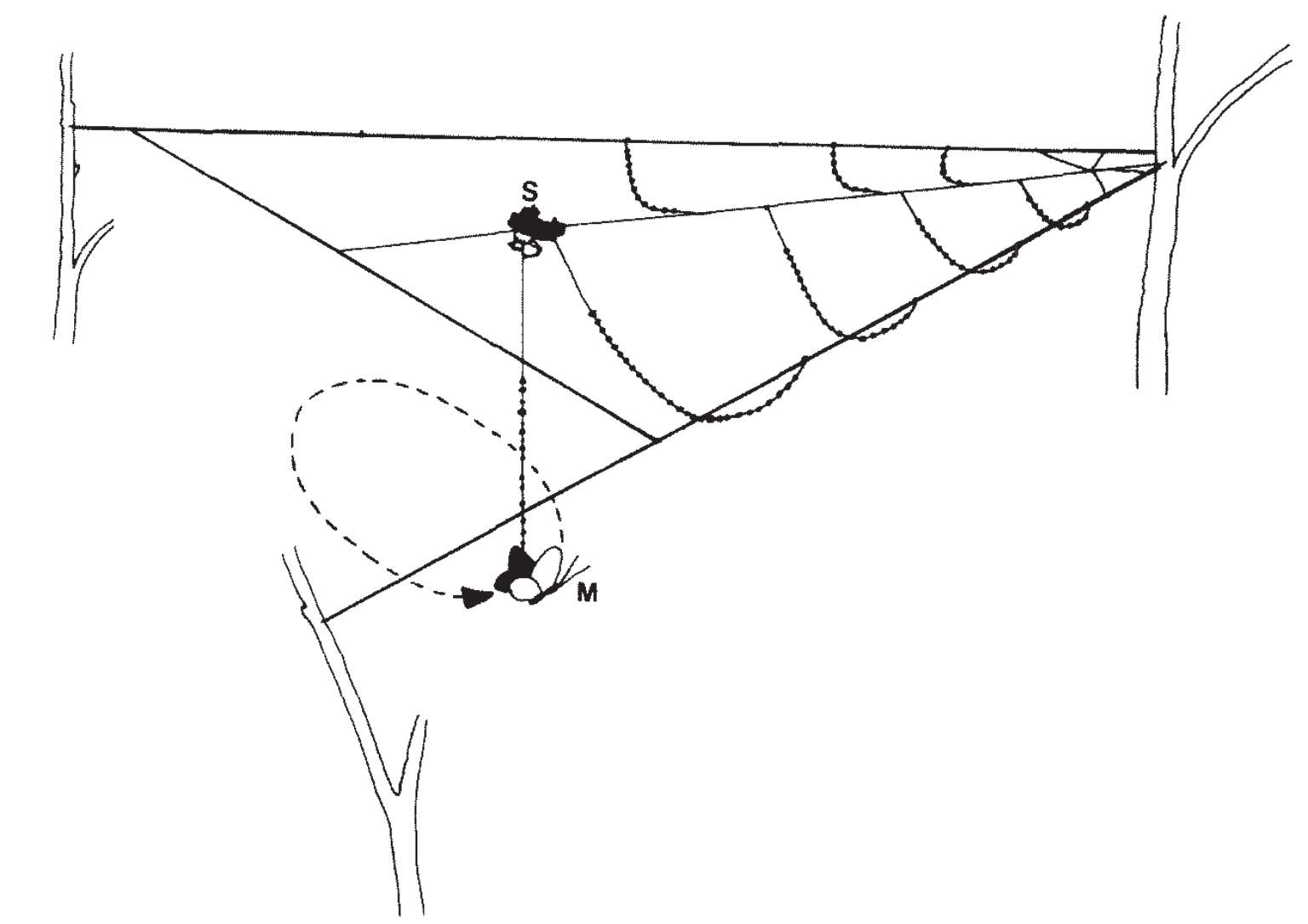
图2.8 具有可快速断开的蛛丝的菱腹蛛的扇形网。
如果我们将菱腹蛛的扇形网看作双刺蛛的圆蛛网的简化版本,那么在同一简化方向上,最终版本便是流星锤蛛( Mastophora )的单根蛛丝(图2.9)。此处的“流星锤”(bolas,或bola)指的是一种最初由南美原住民发明的武器,至今仍被高乔人用来捕猎,猎物包括潘帕斯草原上的大型不飞鸟美洲鸵。它由一根绳子及其两端的重物,比如一对球状物或石头组成。高乔人捕猎时将其抛向猎物,以缠住猎物的腿,将猎物拽倒。查尔斯·达尔文年轻时曾在马背上试用过这东西,结果套住了自己的马——这让高乔人忍俊不禁,但马就未必开心了。流星锤蛛的猎物始终是夜蛾科的雄蛾,这是有原因的。夜行性的雌蛾通过释放一种独特的“香水”引诱远处的雄蛾。而流星锤蛛通过合成一种与之非常相似的“香水”来引诱雄蛾赴死。这种蜘蛛的“流星锤”是末端有一个沉重坠子的蛛丝。蜘蛛会用一足握住,然后不断挥舞着这个流星锤,直到流星锤缠住一只飞蛾,最后蜘蛛把猎物拖向自己。总的来说,这个坠子比高乔人那简单的石头袋更富有技术含量。它实际上是一根紧密收卷在一个水滴中的蛛丝,就像圆蛛网上的一颗黏珠一样。当蜘蛛抛出它时,蛛丝就会自动散开,就像垂钓者抛饵时鱼线会自动散开一样。如果飞蛾被流星锤击中,它就会被黏住并绕着圈子飞。故事的其余部分与先前那些利用易断蛛丝织网的蜘蛛所为大致相同:飞蛾被蛛丝包裹起来,蜘蛛用尖牙对飞蛾注入毒液。流星锤蛛生活在南美洲,对此我不禁突发奇想,也许美洲原住民正是通过观察它的行动而得到了制作流星锤的灵感。

图2.9 流星锤蛛。
到目前为止,我们一直在审视各种标准圆蛛网的变体和简化版本。现在是时候回到圆蛛网本身了。在前一章的末尾,我们提出了一个问题,即如何将生物形程序这样的人工选择计算机模型转化为自然选择模型,用盲目的“自然之眼”而不是人类的眼睛来做选择。我们一致认为,生物形面临的障碍在于,它们没有一个与真实的物质世界相对应的环境,让它们可以在其中生存并检验成功与否。我们可以想象一些生物形表现得像捕食者;也许可以想象它们追逐其他生物形,就像追逐猎物一样。但是,似乎没有一种自然而不做作的方法来决定生物形的哪些特征会让它们在捕捉猎物或逃避捕食者方面表现得好或不好。我们人类的眼睛可能会看到某个生物形的一端有一对可用以捕食的尖牙(图1.16)。不管这些尖牙厉爪在我们的想象中有多么可怕,却都不能在实践中证明自己,因为它们不会动,它们并不存在于一个真正的物理世界中,一个让利齿可以咬穿真正猎物的外壳或皮肉的世界。这些尖牙和硬皮只是二维荧光屏上的像素图案。锐度和韧性,脆弱性和毒性,这些数值在计算机屏幕上没有任何意义,程序员可将任意数字定义为某种经过设计的意义。你可以制作让这些数值彼此对抗的计算机游戏,但给这些数值披上图形的外表只是装点门面的花架子而已。游戏玩家可以毫不在意这些“武断”和“做作”,但我们不行。而这正是在上一章的末尾,我们如释重负地将蜘蛛网视为救星的原因:它是一种可以用非人为方式模拟的自然。
现实生活中的圆蛛网主要在二维平面上展开。如果网眼太大,苍蝇就会直接穿过。而如果网眼太小,竞争对手(其他蜘蛛)就会以更少的成本获得几乎相同的收益,因此会留下更多的后代来继承它们在经济方面更吝啬的基因。自然选择找到了有效的妥协。在计算机屏幕上绘制的网具有与在同一屏幕上绘制的苍蝇相互作用的属性,且这种互动方式绝非随心所欲。网眼的大小是一个在计算机屏幕上真正有意义的量,与计算机中“苍蝇”的大小相关。线的总数量(“蛛丝成本”)是另一个这样的量。两者之间定义效率的比率可以在人为的较小允许范围内进行衡量。我们甚至可以将一些更复杂的物理规律引入这个计算机模型中,弗里茨·沃尔拉特(很多我在本章中所写的内容就是从他那里学到的)及其物理学家同事洛兰·林(Lorraine Lin)和唐纳德·埃德蒙兹(Donald Edmonds)已经开了个好头。模拟计算机“蛛丝”的弹性和断裂张力要比模拟“躲避计算机捕食者”时的“敏捷性”或“发现”捕食者时的“警觉性”更容易。但在本章中,我们将更多地关注织网行为模型本身。
在为计算机蜘蛛编写模拟规则时,程序员可以对真实蜘蛛实际遵循的规则以及打断蜘蛛行为流的决策点进行大量详细研究。沃尔拉特教授及其国际蜘蛛研究小组的成员处于这一研究领域的前沿,因此他们很出色地将相关知识赋予了计算机程序。事实上,编写计算机程序是一种总结任何规则的很好的方法。山姆·乔克(Sam Zschokke)是这个小组的成员,他的任务是以计算机能理解的形式总结蜘蛛织网活动相关的描述性信息。他开发的程序被称为“活动观察”(Move Watch)。彼得·富克斯(Peter Fuchs)和蒂埃莫·克林克(Thiemo Krink)则以尼克·格茨(Nick Gotts)和阿伦·阿普·里西亚特(Alun ap Rhisiart)的工作为基础,专注于计算机蜘蛛“捕捉计算机苍蝇”的逆向编程任务。他们的程序叫作“织网者”(NetSpinner)。
图2.10为“活动观察”程序呈现的蜘蛛织网时的动作图。请注意,这些不是真实蛛网的图片,尽管它们看似如此。我们现在看到的是蜘蛛运动时段的叠加生成图。它是通过拍摄蜘蛛织网的过程制作的。蜘蛛在连续时点的位置以网格坐标的形式被输入计算机,然后计算机在这些连续的位置之间画线。例如“黏性螺旋”线(图2.10e)代表了蜘蛛在构建黏性螺旋结构时的运动轨迹。它们并不代表任何蛛丝的确切位置,否则它们会分布得更均匀。事实上,这些图聚焦于位置的“波动”,其反映了蜘蛛在构建黏性螺旋结构时使用临时辅助螺旋结构作为支撑的事实(图2.10d)。
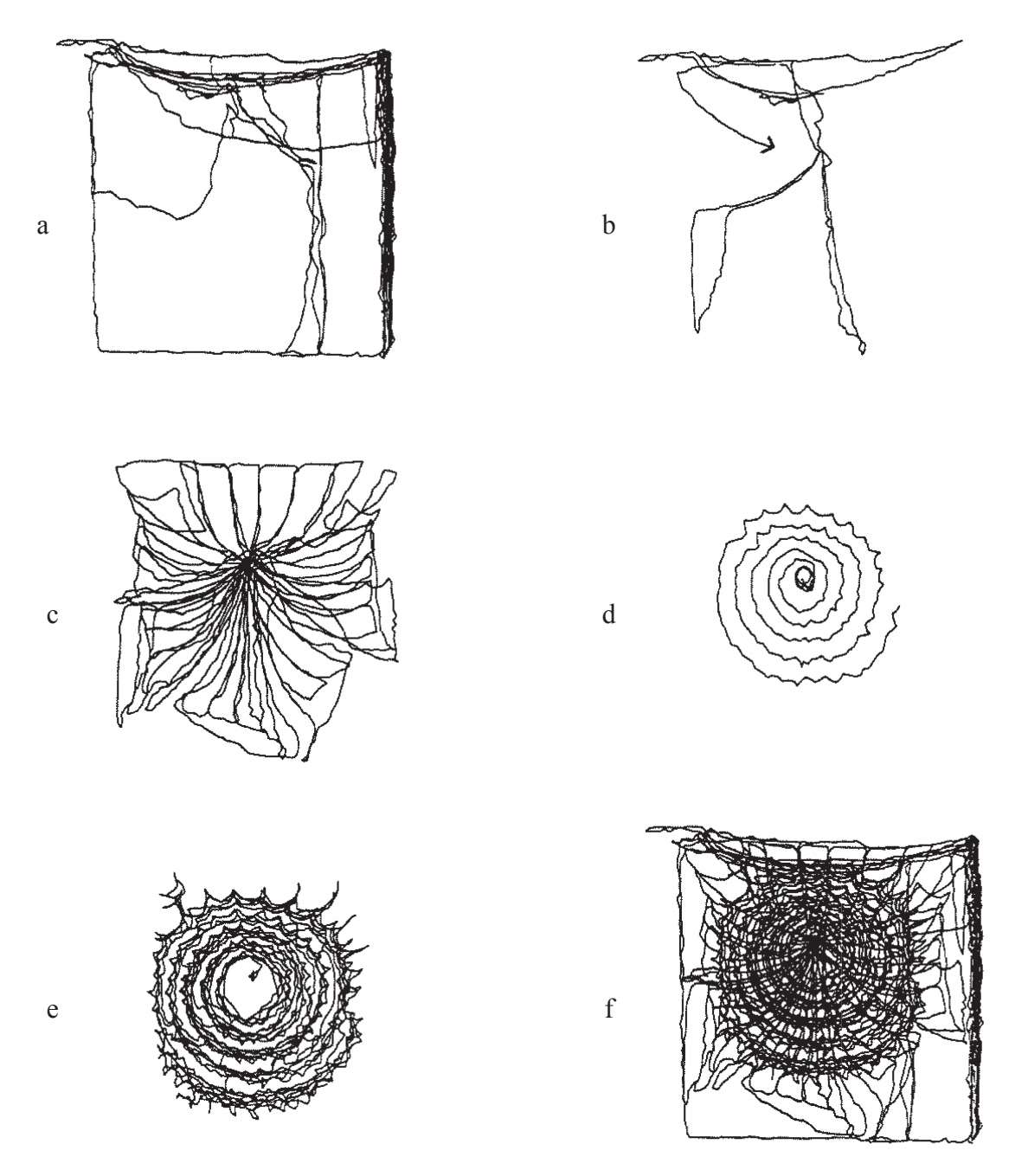
图2.10 对某种具体蜘蛛(十字园蛛)织网时所在位置进行的计算机追踪,由山姆·乔克编写的“活动观察”程序实施:(a)(b)预备阶段;(c)径向辐条;(d)辅助螺旋结构;(e)黏性螺旋结构;(f)所有轨迹重叠。
这些图并不代表计算机蜘蛛的行为模型。相反,它们是真实蜘蛛行为的计算机描述。现在我们转向“织网者”,这是一个互补程序,它的行为就像一种理想化的、理论化的蜘蛛。我们可以让它表现得像任何一种理论上存在的蜘蛛。“织网者”程序会模拟人造蜘蛛的行为,就像生物形程序模拟类昆虫生物的组成结构一样。它利用行为规则在计算机屏幕上构建“蛛网”,这些行为规则的细节在“基因”的影响下有所不同。就像在生物形中一样,这里的基因只是计算机内存中的数字,它们也会代代相传。在每一代中,这些基因都会影响人造蜘蛛的“行为”,从而影响“蛛网”的形状。例如,一个基因可能控制径向辐条之间的角度:该基因的突变将通过对计算机蜘蛛的行为规则进行数值调整来改变辐条的数量。就像生物形程序一样,基因可以随着世代的更替而随机地改变它们的值。这些突变表现为蛛网形状的变化,并因此受到选择的影响。
你可以将图2.11中的6张网视为生物形(暂时忽略图上的那些点)。左上角的网是亲代,另外5张则是突变的子代。当然,在现实生活中,网不会生网,而是(织网的)蜘蛛生蜘蛛。但这种设置实际上有一个很重要的意义,我先前说过,蛛网也可以被认为是蜘蛛躯体的一部分。(塑造人类亲代的)基因产生(塑造人类子代的)基因。而在计算机模型中,构建左上角亲代网的基因(通过它们对一只我们在屏幕上无从得见的“假想蜘蛛”的行为的影响)发生突变,从而产生了构建其他5个子代网的基因。
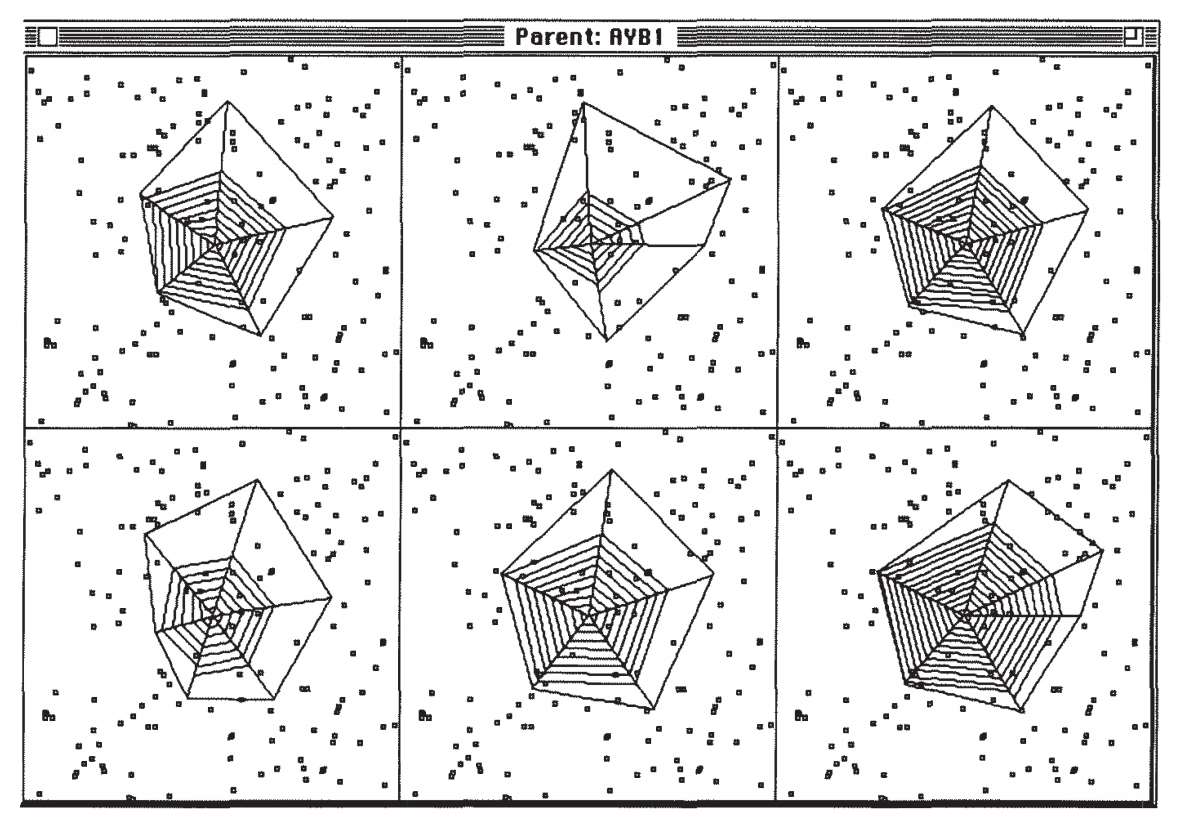
图2.11 计算机生成的蛛网,被计算机苍蝇不断扑上。“织网者”程序由彼得·富克斯和蒂埃莫·克林克编写。
当然,就像我们选择一种生物形进行繁殖一样,我们可以打量6张网并从中选择一张进行繁殖。这意味着它的基因将被选择并传递给下一代(可能会发生突变),但这种做法是人择。我们从生物形转向蜘蛛网的全部意义在于,我们由此窥见了一个模拟自然选择的机会:通过测量网捕捉“苍蝇”的效率进行选择,而不是通过人类审美的一时兴起进行选择。
现在让我们看看图片上的点。这些“苍蝇”是计算机随机向蛛网发射的。如果仔细观察,你会注意到射向所有6张蛛网的苍蝇采用的是同一组随机定位。这是计算机一如既往的特点,恰与现实生活相反,除非你特意告诉它不要这样做,否则它就会重复实施。在这个例子中,这种重复无关紧要,甚至可以简化蛛网之间的比较。这种比较在一定程度上意味着计算机可以计算出6张网中每一张网“捕获”的苍蝇的数量。如果这就是全部规则,那右下角的蛛网无疑将拔得头筹,因为它的黏性螺旋结构囊括了最多数量的苍蝇。但是苍蝇的数量并不是唯一重要的变量,还有蛛丝成本。上排中间的蛛网用了最少的蛛丝,所以如果这是唯一的标准,它便会赢得比赛。而真正的赢家是捕到苍蝇的数量,减去根据蛛丝长度计算出的成本后所得数值最高的蛛网。通过这种更为复杂的计算,下排中间的蛛网力压其他对手。于是它被选择繁殖并将构建它的基因传递给下一代。正如在生物形程序中一样,这种优胜者代代繁殖的过程形成了一种渐进的演化趋势。但是,在生物形中,这种趋势的方向完全是由人类的心血来潮所引导的,而在“织网者”程序中,选择是自动朝着提高效率的方向进行的。这正如我们所愿:一个模拟自然选择,而非人工选择的计算机程序。在这些条件下会发生什么呢?运行了一整夜、传递了40代后出现的蛛网竟是如此逼真,这确实相当令人满意(图2.12)。
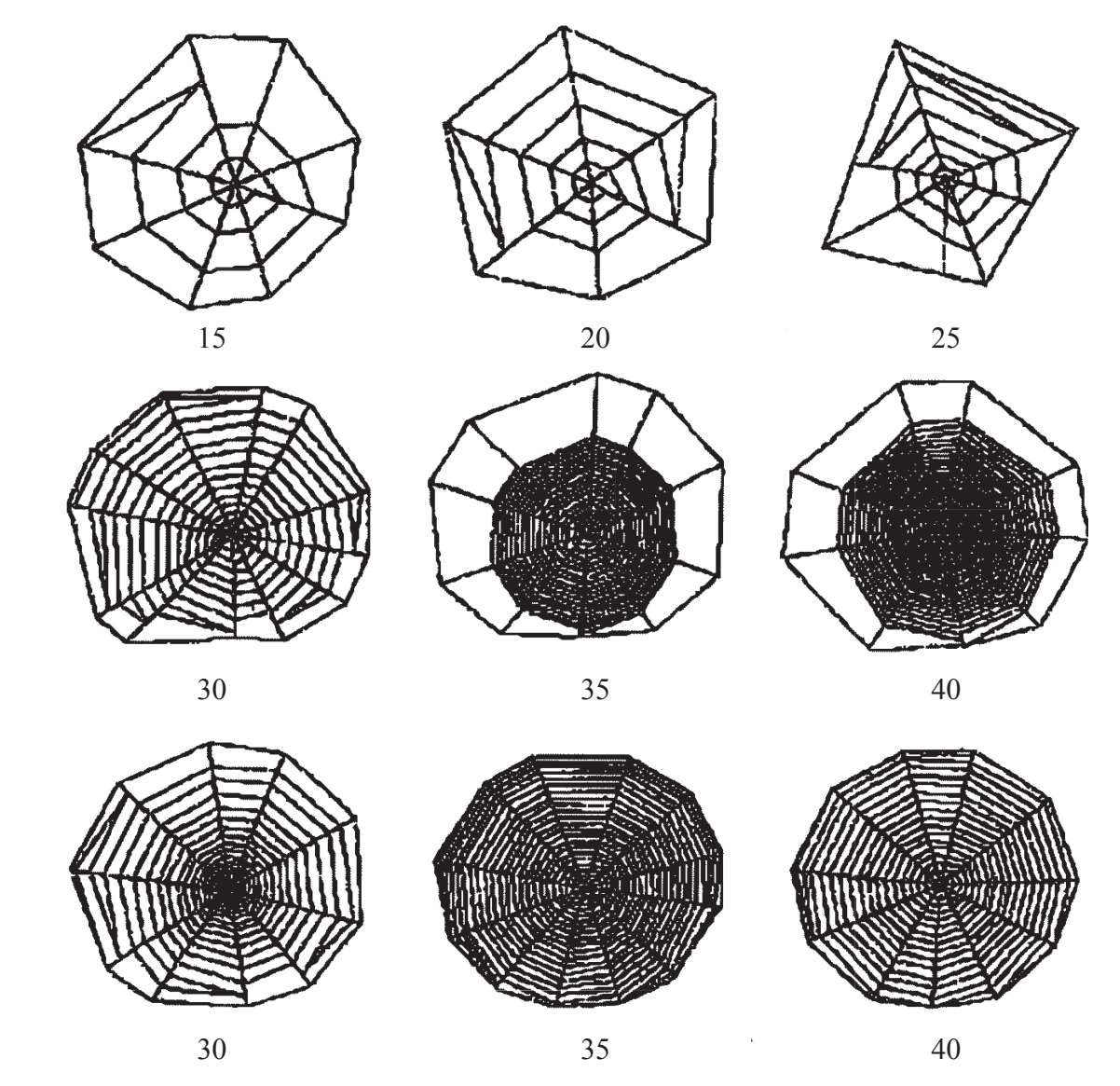
图2.12 “织网者”程序呈现的蛛网的一夜演化过程,图中数字代表繁殖的代数。
到目前为止,我所展示的图片是由“织网者Ⅱ代”制作的,它主要是由彼得·富克斯编写的(“织网者Ⅰ代”是一个初级版本,我就不在此讨论了)。后续的“织网者”程序版本由蒂埃莫·克林克重写,在生物形的另一个重要方面实现了进一步突破。“织网者Ⅲ代”纳入了有性生殖,而生物形程序和“织网者Ⅱ代”均只能实现无性生殖。计算机蜘蛛的有性生殖有何意味?你不会真的在屏幕上看到蜘蛛交配,尽管毫无疑问这是可以做到的,还可以偶尔呈现同类相食的高潮部分,但并无必要。这个程序所做的是实施有性生殖特有的基因交流,将亲代一方的一半基因与另一方的一半基因重新组合。
以下是它的工作原理。每一代都有一个由6只蜘蛛组成的种群,或称“同类群”(deme),其中每只蜘蛛都会织网。蜘蛛网的形状是由“染色体”或一串基因决定的。正如我们在上面看到的,每个基因都通过影响特定的蛛网构建“规则”发挥作用,然后蛛网就会经受“苍蝇”的狂轰滥炸。蛛网“优秀度”的计算方法和以前一样,用捕获的苍蝇数减去所用“蛛丝”的成本得出。每一代都会有固定比例的蜘蛛死亡,而且死亡的都是结网效率最低的蜘蛛。剩下的蜘蛛则随机地相互交配,产生新一代的蜘蛛。“交配”意味着两只蜘蛛的染色体“排成一行”并交换一部分染色体。这听起来似乎有点古怪且做作,不过你只要想想这正是我们和蜘蛛的真正染色体在有性生殖中的表现,便会释然了。
随着这个过程的继续,种群经历了一代又一代的演变,但程序编写者还做了进一步的改进。我们拥有的不是一个由6只蜘蛛组成的同类群,而是拥有(比如说)3个彼此“半分隔”的同类群(图2.13)。除了不时有一个个体带着自己的基因“迁徙”到另一个同类群外,这3个同类群中的每一个大体都是独立演化的。我们将在第4章讨论这背后的理论。目前,我们可以简单地说,这3个同类群都朝着不断改进的蛛网——更经济地捕捉苍蝇的蛛网——这一方向演化。有些同类群可能会走上演化的死路。迁徙蜘蛛的基因可以被认为是另一个种群的新鲜“理念”。这就像一个成功的亚种群向一个不太成功的亚种群发出基因,以“建议”使用更好的方法来解决织网问题。
在第一代,所有3个同类群中都出现了各种各样的网形,大多数不是特别高效。和在图2.12的无性生殖例子中观察到的一样,随着世代更替,变异逐渐收窄,蛛网朝着更好、更高效的形状发展。但是现在有性生殖使得织网“理念”在同类群内部共享,所以每个同类群的不同成员彼此间非常相似。另一方面,它们在基因上与其他同类群基本隔绝,因此同类群之间存在明显差异。在第11代的某一时刻,两个蛛网的基因从同类群3迁徙到同类群2,从而用同类群3的“理念”感染了同类群2。到了第50代——实际上在有些例子中不需要这么久——这些蛛网已经演化成优良、稳定、高效的捕蝇工具。
因此,像自然选择这样的机制可以在计算机中运作,并产生比最初的网更有效的人工网来捕捉苍蝇。这仍然不是真正的自然选择,但它比生物形的纯粹人工选择更接近自然选择。但即使是“织网者”程序,也不是真正的自然选择。“织网者”必须进行计算,以决定哪些蛛网适合繁殖,哪些不适合。程序员必须决定多少给定长度的“蛛丝”的价值与一只“苍蝇”的价值相同。程序员可以随意改变两者的转换率。比如说,他可以把蛛丝的“价格”提高一倍,这可能会降低更大或更密集的网的繁殖成功率,因为为了多捕几只苍蝇,这些网在蛛丝的使用上有点奢侈。程序员必须自行决定这种转换率,他可以随意选择数值。这只是在幕后进行的许多此类转换中的一种而已。苍蝇“肉”转化成小蜘蛛的速度也由程序员决定,它可以有所不同。蜘蛛死于其他与蛛网质量无关的原因的可能性,也由程序员暗中决定。这些决定是任意为之的,不同的决定可能产生不同的演化结果。
但在现实生活中,这些决定都不是任意为之的。它们甚至都不是一个真正的决定,也没有计算机被用来进行决策。它们只是发生了,自然而然,波澜不惊。蜘蛛吞食的苍蝇会转换为构成蜘蛛子代的蛋白质,其中的转换因数也同样顺其自然而已。面对大自然,我们仅能事后再来对其进行计算,并不能事前干预这类因数。而不管是否有人用某种数学上的经济术语来描述它,这种转换都会自然发生。昆虫肉被转化为蛛丝也是如此。实际上,“织网者”程序假定所有苍蝇都是相同的。在现实生活中,这些猎物的细节可能会有令人生畏的复杂性,但程序对这些复杂性的处理也同样简单而直接。除了一些昆虫比其他昆虫大这一事实外,不同昆虫还可能存在细微的质的差异。假设为了制造蛛丝,一种特定的氨基酸是必需的,而这种氨基酸在蜘蛛体内是短缺的。不同种类的昆虫在这种特定氨基酸的含量上各不相同。因此,要真正计算昆虫的价值,就必须考虑到它是什么种类的昆虫,以及它的体型有多大。“织网者”可以计算,但这将是另一种人为、武断的计算。而在现实中,它就这样自然而然地发生了,并无任何精心计算。这是另一种复杂性。据推测,在一只蜘蛛几乎已吃饱的时候,一只额外苍蝇的价值要比她饿着肚子时捕获苍蝇的价值少。“织网者”程序忽略了这一点,但现实不会。“织网者”可以进行人为计算,以考虑到蜘蛛饱腹程度带来的复杂性。而在现实生活中,不管你愿不愿意,它都会发生,无需明确的计算。
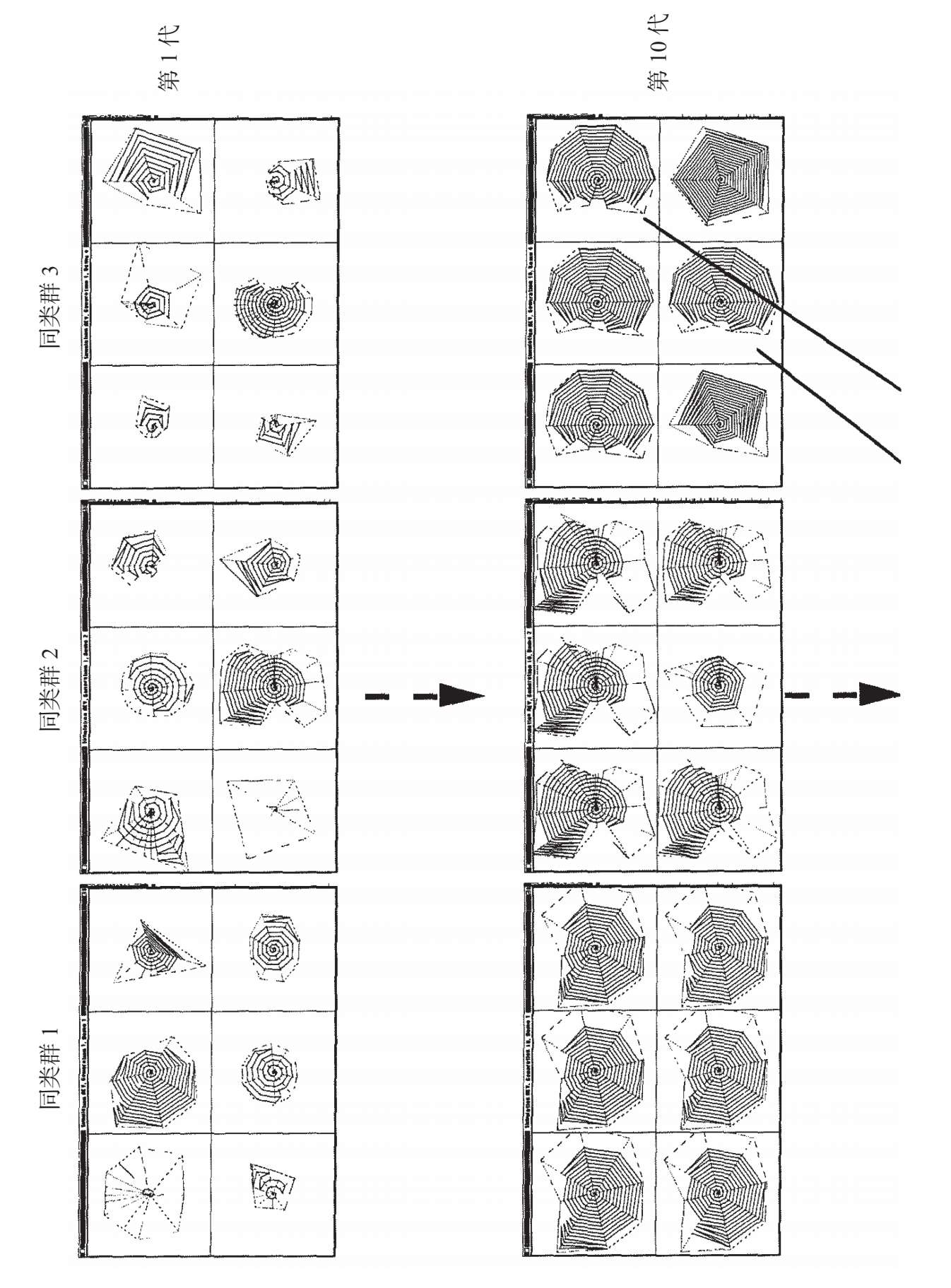
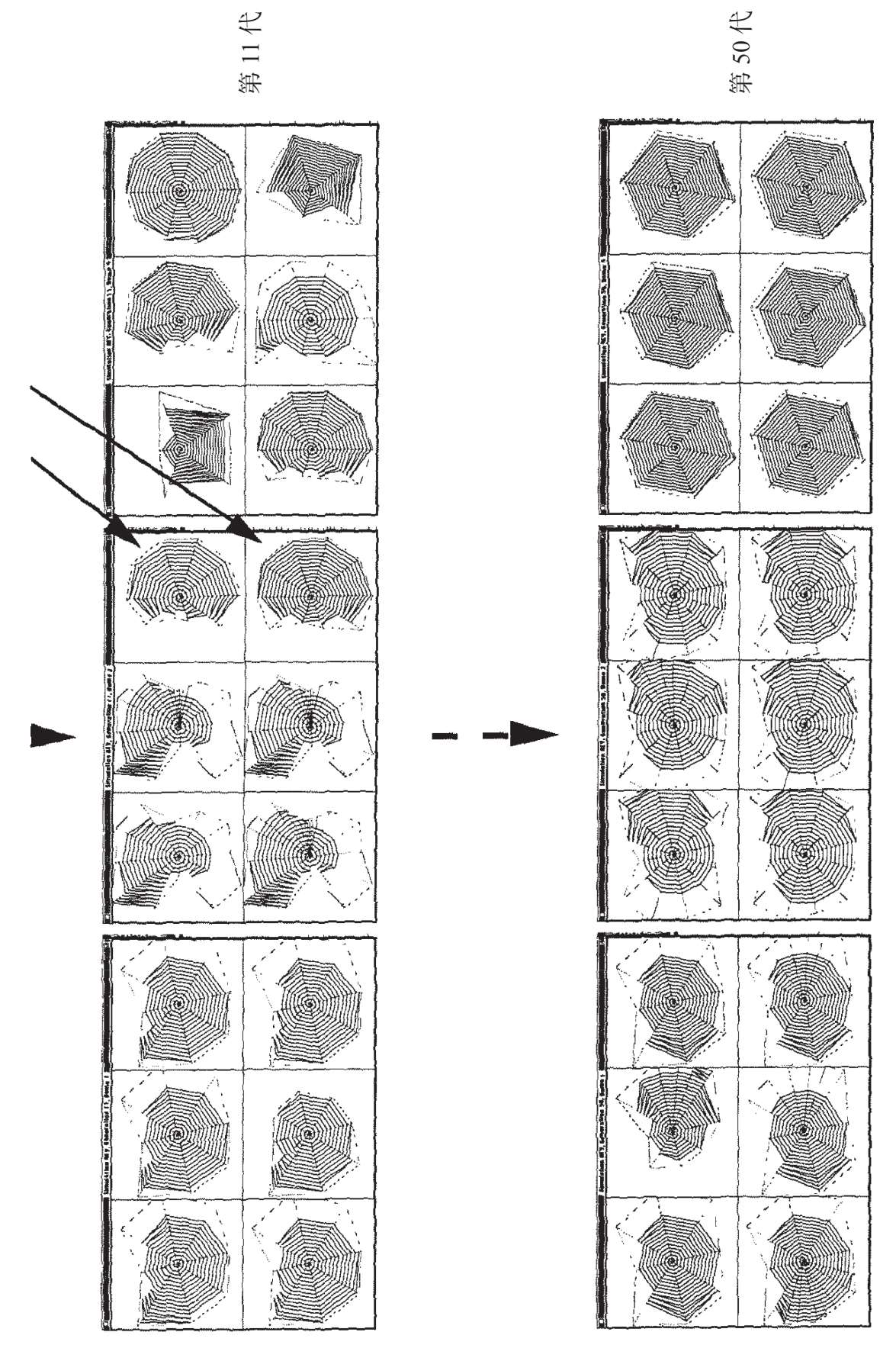
图2.13 “织网者”程序通过“自然”选择繁殖的3个有性生殖计算机蛛网同类群的50代演化。在第11代,来自同类群3的两个蛛网基因型迁徙到同类群2并进行杂交(如图中实箭头所示)。
我想表达的观点是显而易见的,几乎不言自明,但又重要到必须言明。每次在“织网者”程序中加入一个额外的和复杂的细节时,就必须由一个熟练的人类程序员费力编写数页计算机代码。然而相比之下,在现实中,这种显式计算却是明显缺位的。苍蝇蛋白和蛛丝蛋白之间的转换因数是自然存在的。一只苍蝇对一只空腹蜘蛛而言,比对一只饱腹蜘蛛更有价值,这一事实不需要导入任何计算即可证明。如果食物对一只空腹蜘蛛来说不是更有价值的话,那才是咄咄怪事呢。我们习惯于将计算机模型看作现实世界的简化。但从某种意义上说,自然选择的计算机模型并不是对现实世界的简化,而是对现实世界的复杂化。
从某种意义上说,自然选择是一个极其简单的过程,几乎不需要设置什么机制就能使其运行。当然,自然选择的影响和结果是极端复杂的。但是,为了让自然选择在一个真实的星球上进行,全部所需便只是遗传信息。为了在计算机中设置一个自然选择的模拟模型,你当然需要遗传信息的等效物,但除此之外你还需要很多其他的因素。你需要精密的机器来计算大量的成本和收益,还要设置对这些因素进行转换所需的假定“通货”。
此外,你还需要建立一个完整的人工物理环境。我们之所以选择蜘蛛网作为例子,是因为在自然界的所有构造手段中,它们是最容易翻译成计算机语言的手段之一。原则上,我们可以为翅膀、椎骨、爪牙、鳍和羽毛的构造建立计算机模型,计算机可以通过编程来判断其各种形态的效率。但这将是一项极其复杂的编程任务。除非将翅膀、鳍或羽毛置于具有阻力、弹性和湍流等具体特性的物理介质中——如空气或水——否则就无法显示其性能究竟如何。而这些介质很难模拟。除非将椎骨或肢骨置于一个存在压力、杠杆力和摩擦力的物理体系中,否则无法明确其品质如何。硬度、脆性、弯曲和压缩弹性——所有这些参数都必须在计算机中呈现。要模拟大量骨骼之间的动态相互作用——这些骨骼以不同的角度互相支撑,并由韧带和肌腱连接在一起——是一项艰巨的计算任务,动辄需要做出武断决策。模拟机翼周围的气流和湍流是一个如此棘手的难题,以至于航空工程师经常求助于风洞模型,而不是试图在计算机上进行模拟。
然而,我绝对不会低估计算机建模师的工作。“人工生命”(Artificial Life)这门学科于1987年得到命名,我很荣幸被邀请参加在洛斯阿拉莫斯举行的命名仪式,这里曾经诞生过原子弹,现在则转向更具建设性的目标。克里斯托弗·兰顿(Christopher Langton)是1987年第一次会议及后续会议的灵魂人物和召集人,现在他创办了一份关于人工生命的期刊,创刊号刚刚出版。这份期刊中的文章有助于缓解我在上一段表达的悲观情绪。例如,三位北美科学家杰梅特里·特佐普洛斯(Demetri Terzopoulos)、涂晓媛(Xiaoyuan Tu)和拉杰克·格泽茨丘克(Radek Grzeszczuk)编写程序,生成了令人叹为观止的模拟计算机鱼,它们的行为像真正的鱼,并在模拟的计算机水体中互动。这些鱼所畅游的计算机世界有自己的模拟物理规律,基于水的真实物理特性而构建。大部分的编程工作都是为了模拟一条鱼,让它表现出恰当行为。然后,这条合格的计算机鱼被复制了很多次,并有了变体,它们都被释放到“水”里,在那里它们会“注意”到彼此,并进行互动。例如,它们会避免彼此“碰撞”,并在“鱼群”里彼此交流。
每条计算机鱼都有一个由23个节点组成的解剖结构,排列在模拟的三维空间中,这些节点通过91根“弹簧”与相邻节点连接(图2.14)。其中12根“弹簧”能够收缩,它们是人工鱼的“肌肉”,通过“肌肉”传递的可控收缩波可模拟真正鱼类弯曲身体的游泳动作,包括转弯。这些鱼可以从经验中学习,改善肌肉收缩的顺序,以便实现直线游泳、转弯和跟随目标。鱼有三种“心理状态变量”,分别是“饥饿”、“性欲”和“恐惧”,它们共同作用产生了“意图”。意图包括“进食”、“交配”、“闲逛”、“离开”和“避免碰撞”。计算机鱼有两个感觉器官,一个用来测量水的“温度”,另一个就像一只粗糙的“眼睛”,探测其所在世界中物体的位置、颜色和大小。为求美观,节点和弹簧组成的骨架被包裹在一个貌似坚固的鱼皮状外壳中。不同种类的鱼,例如捕食者和猎物,不仅可通过计算机渲染出的不同外观来区分,而且还可通过行为差异来区分(图2.15)。捕食者与猎物的不同,不仅在于它们的大小,还在于它们的行为倾向、三种心理状态变量的权重以及不同的“意图”。顺便说一下,即使使用今天运行速度飞快的计算机,这种模拟也是极其耗时,以至于一个包含许多条彼此互动的鱼的人工世界无法提供实时的拟真视觉呈现。这些鱼在一个比现实世界更慢的时间尺度上游弋,相互追逐、逃离和求爱,如果我们想要以现实生活中的速度来观赏它们,就不得不求助于类似延时摄影的技术。不过,这只是一些细枝末节,在理论上并不重要:这个问题将随着性能更强大的计算机的出现而解决。
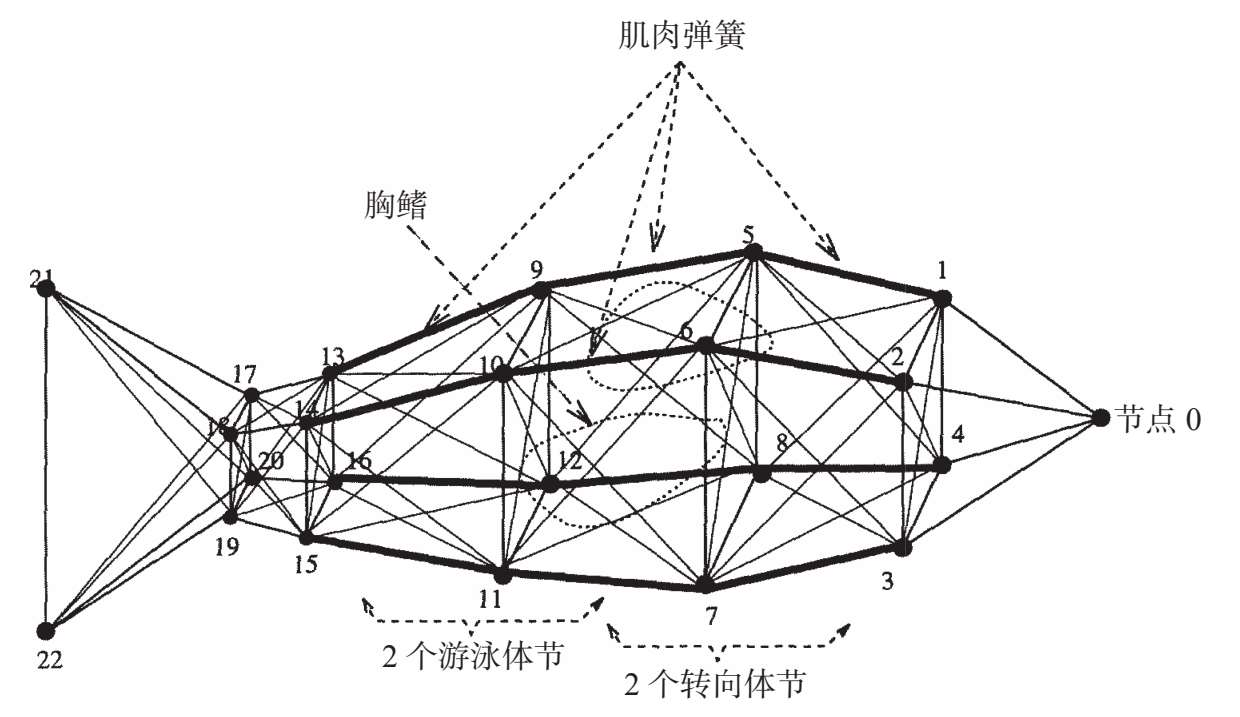
图2.14 人工鱼(计算机鱼)有着弹簧构成的骨架。
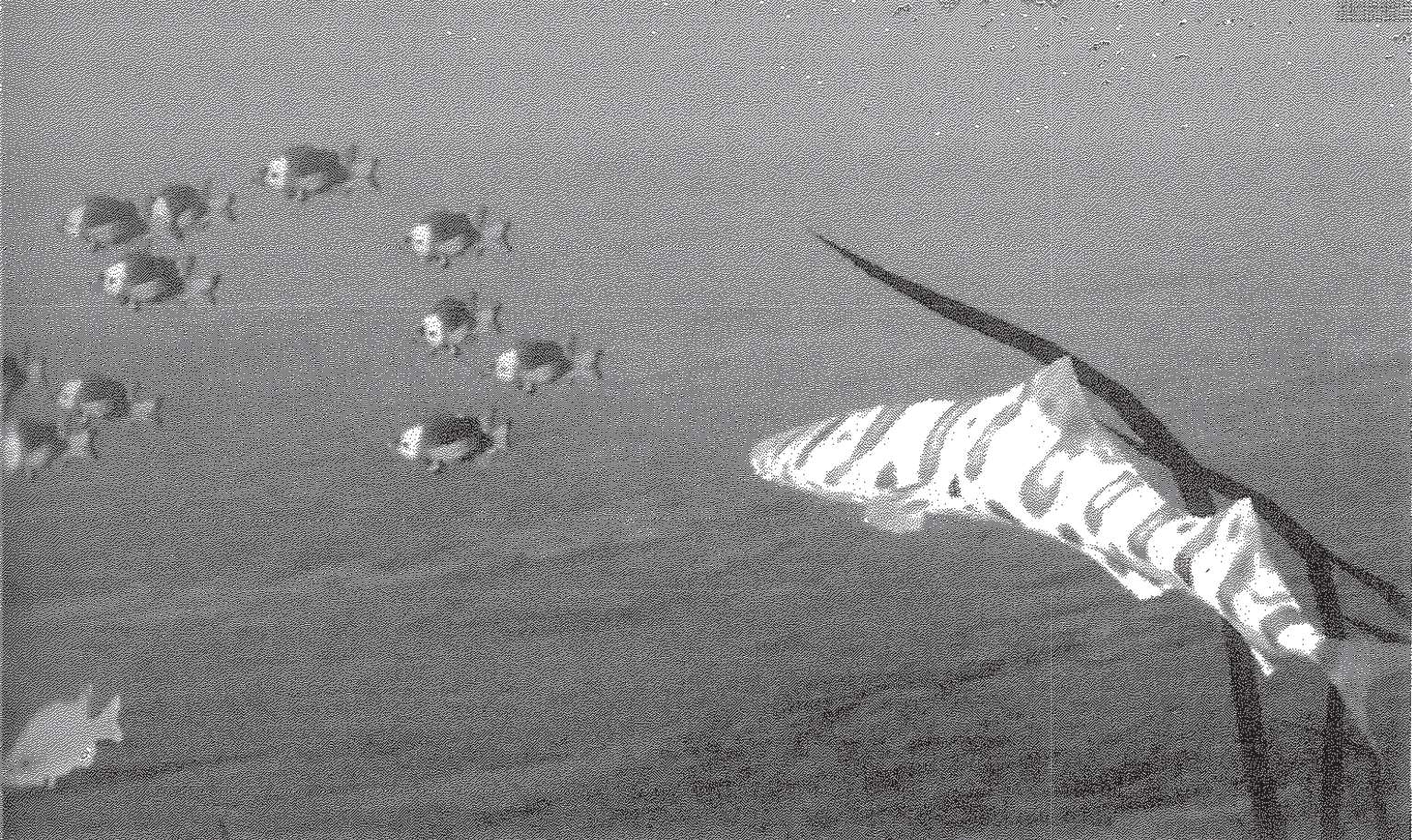
图2.15 人工鲨鱼跟踪一群猎物。
特佐普洛斯、涂晓媛和格泽茨丘克在计算机水体中构建的人工鱼世界可谓丰富多彩,足以成为演化模拟的一个上佳候选对象。目前,尽管他们的鱼也交配,但仅限于求偶行为,它们实际上并不繁殖。该篇文章的作者很清楚,下一步的方向显然是为控制肌肉弹簧的各种行为变量建立定量权重的“基因”,并在更高的层次上设置精神状态变量和意图。交配的雄性和雌性可以重新组合它们的基因,偶尔发生突变,产生基因结构不同的新一代。随之而来的便会是自然选择下的演化,尽管其终究是在计算机模拟的人工环境中进行的。也许没有必要事先定义分别作为捕食者和猎物的鱼。你可以从两个物种开始模拟,它们只在体型和交配相容性上存在差异,而并非在习性上不同,自然选择可能会自然而然地导致体型较大的物种在许多代之后演化出捕食较小物种的习性。谁知道届时在我们眼前会呈现出何等奇妙怪诞的人工自然史呢?
我预见这将是一个蓬勃发展的研究领域,并对此充满期待。人们可能会给它起一个自相矛盾的名称:人工自然选择。然而,从某种意义上说,对现实世界中自然选择的最简单“模拟”就来自现实世界本身。不同的骨头在断裂张力、压缩弹性、硬度、力线和钙消耗方面确实有所不同。如果你愿意,你可以计算这些细节,但不管你是否计算,事实都是有些骨头会断裂,而有些则不会;有些骨头会消耗大量珍贵的钙,而另一些还能让身体留下多余的钙并进入乳汁中。从这个意义上说,现实生活非常简单。有些动物比其他动物更容易死亡。美国目前性能最强的计算机可能要花费一年的时间来计算相关细节。但在自然界,残酷的事实就是,有些生物会死,有些则不会,如此而已。
如果你愿意的话,你可以想象世界上所有种群的基因共同构成一台巨型计算机,不停计算着成本、收益和转换率,基因频率的变化模式所发挥的作用就如同电子数据处理器中来回穿梭的1和0。这是一个非常有启发性的见解,我们将在本书的最后再提及这一点。而现在,是时候阐明书名的含义了。什么是“不可能之山”?我们能从中学到些什么?
[1] 我将使用物种的拉丁学名,我希望大家能原谅我在有关这些名称的惯例上做了一个学究式的脚注,因为有大量受过教育者(也许就是那些把达尔文的杰作称为《物种起源》的人)会把它们搞错。拉丁学名由两部分组成:一个属名[例如,人属( Homo )是一个属],后面跟着一个种名[例如,智人( sapiens )是唯一幸存的人属物种],都用斜体或加下划线书写。更高级别的分类单位的名称不用斜体。人属归于人科(Hominidae)。属名是独一无二的:只有一个人属( Homo ),也只有一个胡峰属( Vespa )。物种经常与其他属的物种共享一个种名,但由于属名的独特性,不会造成混淆:大胡峰( Vespa vulgaris )是一种胡蜂,不会被误认为是普通章鱼( Octopus vulgaris )。属名总是以大写字母开头,而种名则从不如此(现在是这样。最初的惯例是可以从专有名称派生出来。但即使是“达尔文氏”这个种名,现在也会被写成“ darwinii ”,而非“ Darwinii ”)。如果你曾经看到过(你常会看到)“ Homo Sapiens ”或“ homo sapiens ”的写法,那都是错误的。顺便说一下,请注意“种”(species)这个词既是单数也是复数,而“属”(genus)的复数形式是“genera”。——作者注