
下载掌阅APP,畅读海量书库
立即打开



协同控制结构是指为了实现预定的目标而把无人机个体联系到一起,主要是研究如何组织和控制无人机个体来实现整个无人机系统所需实现的功能。因此,针对不同的协同作战任务,协同控制结构也是需要调整的。它的选择受到诸多因素的影响,例如,无人机本身、任务性质以及作战环境等,因此应当综合分析这些因素,确定系统的规模及无人机个体间的关系,从而选择合适的结构,充分发挥其优势。
由于无人机是一种自主飞行的飞行器,也是一种在空中飞行的机器人,因此其控制结构的设计方法可以类比多机器人的协同控制结构方法。在关于多机器人合作的多种方法中,基于多智能体(Multi-Agent)的方法正受到人们越来越多的关注,其要点是把系统中的每一个机器人看作独立的智能体。在研究多无人机协同作战控制结构时可以参考Multi-Agent的思想进行设计。
目前在移动机器人领域,借鉴多智能体思想设计出的体系结构已经有很多,比较具有代表性的有面向多机器人协作系统的分层控制式体系结构、基于行为的分布式结构、基于行为的混合分层式体系结构、面向多机器人系统任务级协作的机器人控制体系结构,以及基于并行处理的混合式体系结构。
在无人机协同作战系统中,同样可以借鉴多智能体思想进行体系结构设计,合理的体系结构可以使多无人机之间进行有效的合作。多无人机系统的体系结构也可以分为集中式、分散式、分层式三种。
集中式结构又包括两种结构,如图2-1所示,一种结构是存在一个中心处理控制器,即领航无人机,掌握全部环境信息以及每架无人机的信息,经过信息处理后对每架无人机发布命令,如图2-1(a)所示,这种结构需要选择一架无人机兼任领航无人机,这使领航无人机的工作量与其他无人机相比增加很多。另一种结构则是以控制站作为协同控制中心,无人机直接与之联系,各无人机之间则互相不通信。集中式结构的优点在于理论背景清晰,协调效率比较高,实现起来比较直观。但也有许多缺点,如灵活性、容错性和适应性差,以及大规模的全局寻优问题难以解决,容易只达到局部最优而导致全局意外等,同时受通信带宽的瓶颈限制,如图2-1(b)所示。
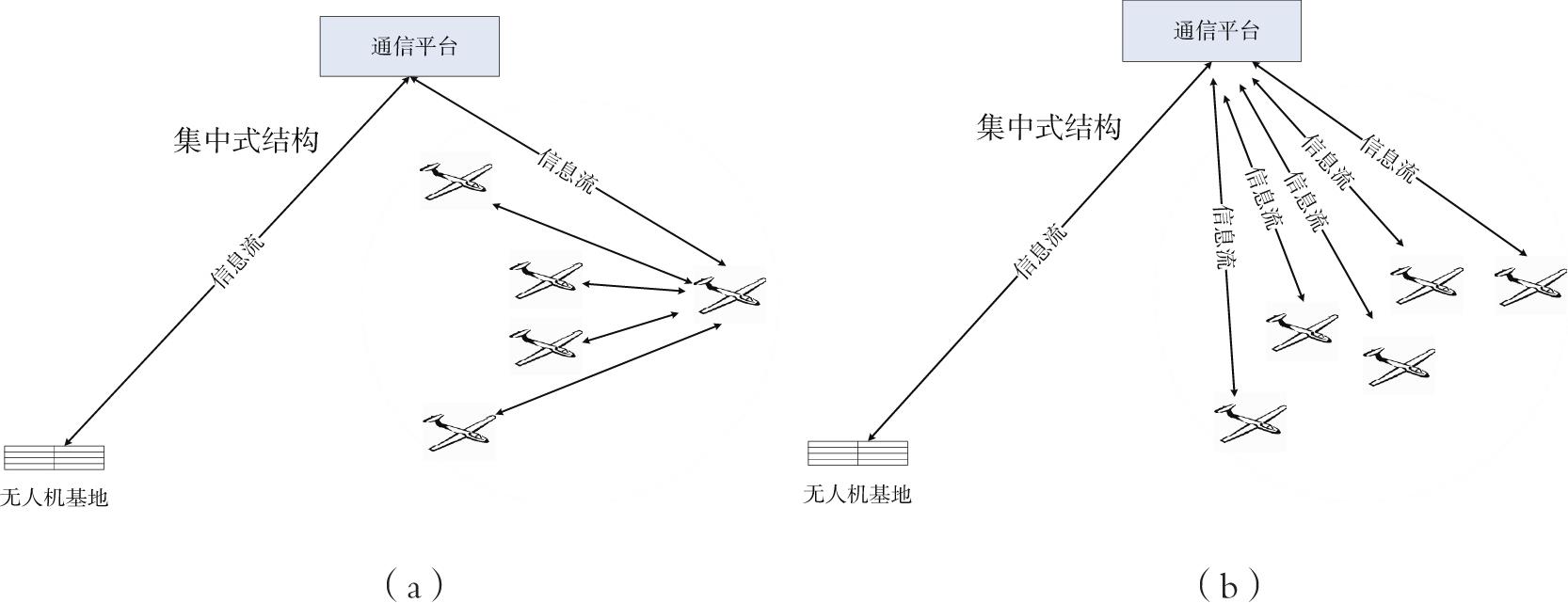
图2-1 集中式结构
相对于集中式结构来说,分散式结构则有较好的鲁棒性、故障冗余以及可靠性等优点。如图2-2(a)所示,分散式结构没有领航无人机,各无人机之间的关系是平等的。但是分散式结构也有一定的缺点,使用这种结构容易使无人机个体无法了解编队系统的整体情况,无法保证一定能得到全局最优解。而且多边协商的效率是很低的,因为个体容易强调自我任务的重要性,从而导致编队完成任务的效率低下。特别是在不确定的环境中遇到突发事件时,无人机个体间很难建立较好的协作关系,难以充分发挥群体的优势,于是就出现了分层式结构。
分层式结构在平等的无人机个体进行水平交互的同时加上了垂直控制,以有效地解决冲突,完成协调,如图2-2(b)所示。监控层(即地面控制站)发布命令给领航无人机,而各无人机具有一定的自主性,这是一种介于集中式和分散式之间的结构。
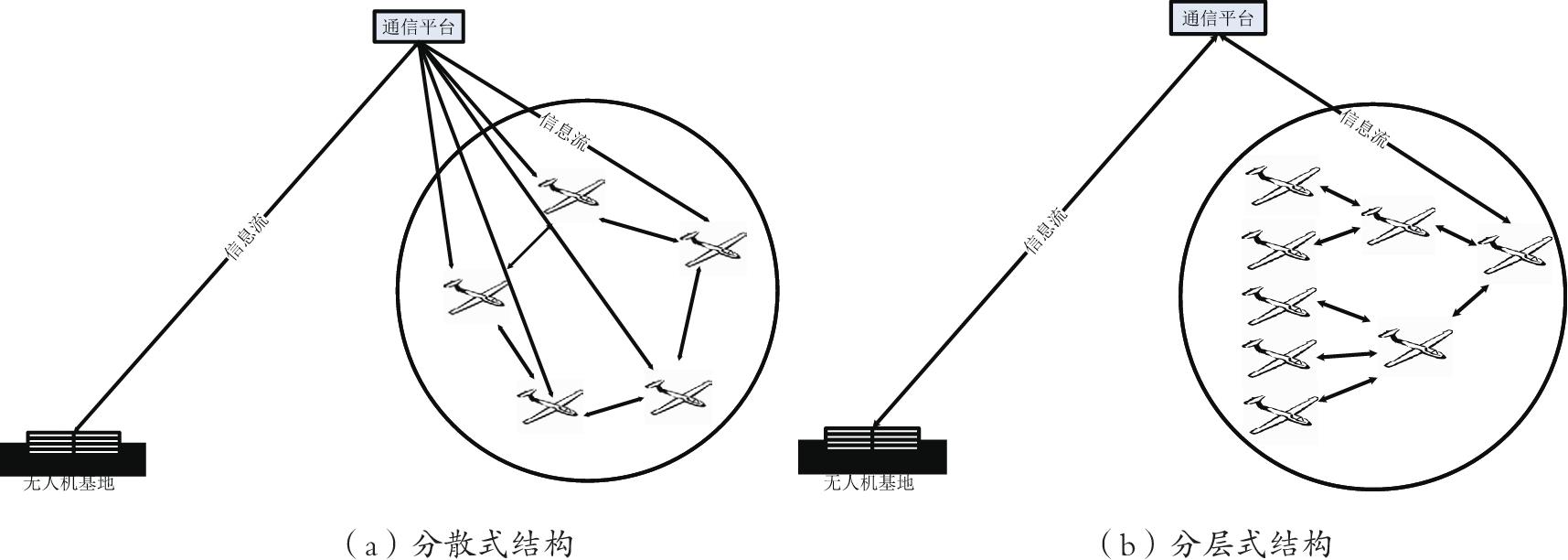
图2-2 分散式和分层式结构
通过上面的分析可以发现,集中式、分散式、分层式结构各有优势和缺陷,并没有一种普适的方法可以用于无人机协同控制结构的设计。因此,有必要在上述结构设计思路的基础上,提出一种有效的方法来进行多无人机协同作战任务的飞行控制结构设计。
由于分层式结构逻辑清晰,便于控制器的设计,因此可以以分层式结构为基础,针对其缺陷提出一种相对参考点确定规则,并考虑协同作战任务需求,提出合适的多机协同控制结构。具体的设计思路如图2-3所示:先通过基于Agent的方法,在考虑单架无人机飞行控制的基础上进行无人机个体控制结构设计,然后进行两架无人机协同编队飞行控制结构设计,并采用MAS分层式体系结构思想,利用领航无人机选取规则,同时考虑多无人机协同作战任务需求,采用相应的方法扩展到多架无人机。
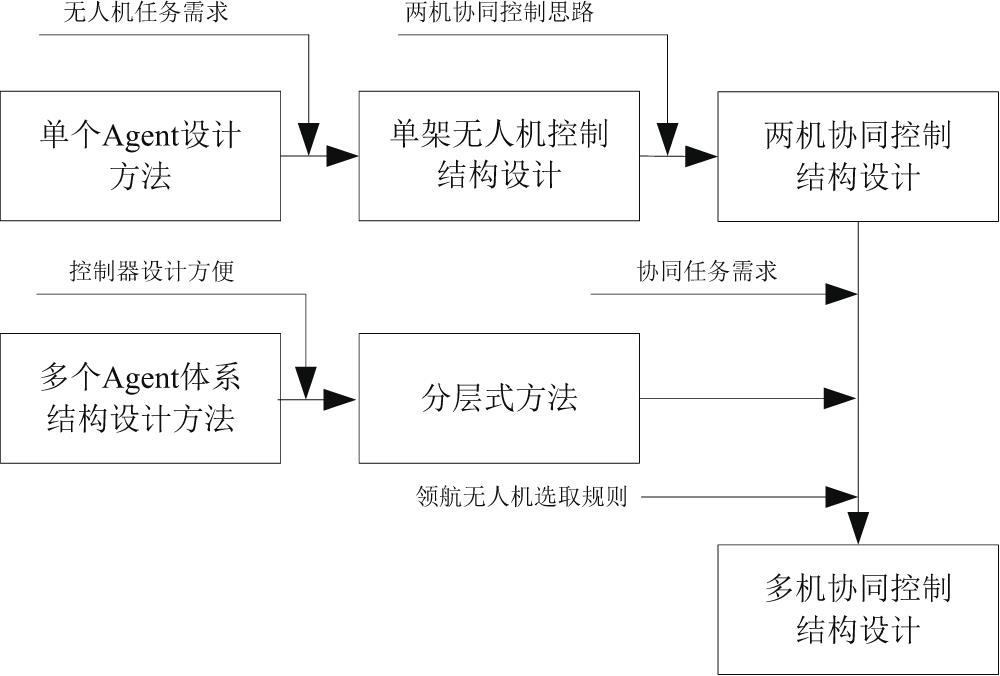
图2-3 无人机协同控制结构设计思路