
下载掌阅APP,畅读海量书库
立即打开



为了简化直流电机控制的讨论,忽略直流电机的电枢反应及励磁磁场的调节,以直流电机励磁磁场恒定(如永磁直流电机)为例进行分析,对于其他励磁形式的直流电机控制算法的设计,基本的控制思想是相同的。为了方便后续的讨论,可以重新定义永磁直流电机的反电动势常数和转矩常数为

则相应的反电动势和转矩公式可以简化为

根据直流电机的数学模型可知,其动态性能由两个惯性环节主导:电磁惯性和机械惯性。直流电机的电磁惯性是由电枢电感引起的,因为电能到磁场能的转换不能瞬间完成,所以电感电流具有连续性,不能发生突变。考虑到电路电阻的作用,可以认为电枢电流为电枢电压的一阶响应;同理,直流电机的机械惯性由转子的转动惯量引起,转子转速具有连续性,不能发生突变。考虑到转子受到的阻尼,直流电机转子的转速也可以认为是转矩的一阶响应。因为直流电机转矩与电流成正比,所以对直流电机转矩的控制体现了其电磁瞬态过程。因为电磁瞬态过程的时间常数远远小于机械瞬态过程的,且从式(3-11)可以看出,转矩是转速控制的基础,所以一般认为转矩控制是直流电机控制的基础。
为了更清晰地理解转矩控制的思想,首先把3.2节中的直流电机数学模型利用控制框图的形式表示,如图3-3所示。
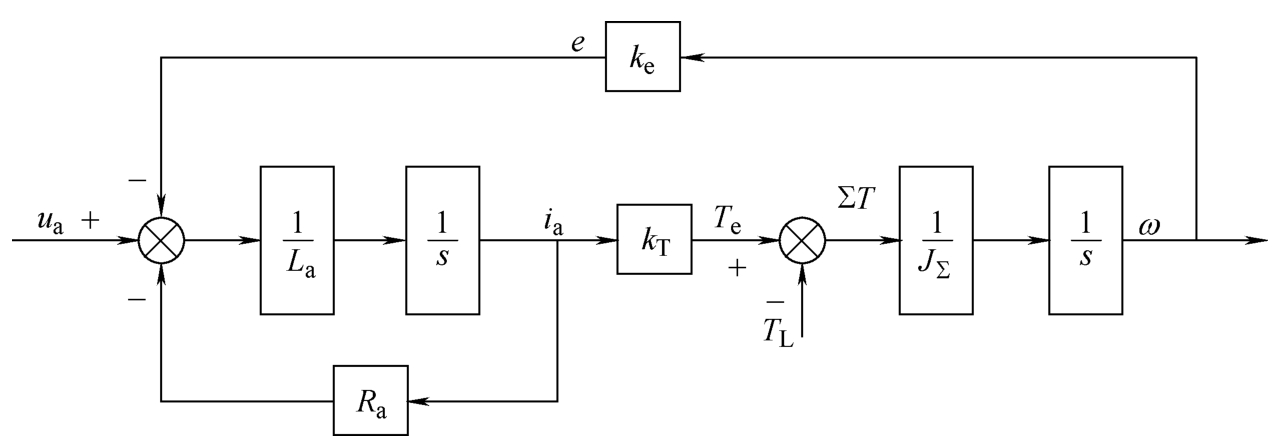
图3-3 永磁直流电机控制框图
控制框图中,电枢电压 u a 为直流电机输入,转子转速 ω 为直流电机输出,系统中的积分环节用频域中的1/ s 表示。因为永磁直流电机的转矩与电流成正比,所以转矩控制等效于电枢电流控制,而直流电机的电枢电流同时由电枢电压的前馈和电枢电阻压降、励磁磁场反电动势两个反馈环节共同决定。可以看到,图3-3中的框图表示与式(3-4)是完全一致的。
图3-3中,励磁磁场反电动势与转速成正比,直流电机转速会对电枢电流产生显著影响,从而影响直流电机转矩,所以在转矩控制中需要考虑如何消除这一影响。认为直流电机的转速可以实时测量,则反电动势的影响就可以实时估计并进行补偿。补偿的方法是:直接利用测得的转速计算反电动势,并将这部分反电动势计算在电枢电压中。因为转速的变化速度远远慢于电流的变化速度,在电流瞬态过程中可以认为转速不变,所以这种补偿方法一般认为是前馈而非反馈,这种方法也称为反电动势解耦控制或反电动势前馈。在假设反电动势影响完全被补偿的情况下,电枢电压与电枢电流的关系是典型的一阶线性关系,其传递函数可以表示为

极点位置位于

若不对其进行闭环反馈调节,则电流响应速度由电感、电阻决定,电感越小,电阻越大,其响应速度越快。若电枢电流可测,调节电枢电流的闭环反馈增益,可以改变原系统的动态响应特性,将传递函数极点配置在极点 p 以左实轴上的任意位置。若采用比例积分(PI)控制器进行电流闭环控制,则可通过零极点对消,将系统极点配置在负实轴上的任意位置。可见,直流电机的转矩控制问题可以直接利用经典控制的方法解决。
对于PI控制器的结构将在后文介绍,其原理及参数标定方法在本书中不进行详细的讨论。有兴趣的读者可以参看文献[15]。下面讨论如何利用直流电机原理解释以上控制算法的设计。若电枢电流可测,则类似利用实时测得的转速估计反电动势 e 并进行补偿的方法,可以对电枢电阻上的压降进行实时估计和补偿。假设反电动势与电阻压降都可以被精确估计并补偿,则此时电枢电压与电流的关系如图3-4所示。
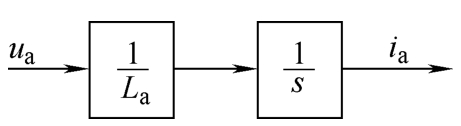
图3-4 直流电机电枢电压与电流的关系(假设反电动势及电枢电阻压降在控制中被实时估计并精确补偿)
这种情况下电枢电流不收敛,随着电枢电压的增加,电流将趋于无穷大。因为电路系统中的电流是依靠电阻收敛的,当电阻为零时,能量在电路中没有损耗,无法达到能量输入与输出之间的平衡,所以电流必然趋于无穷大。此时,可以考虑再次利用实时测得的电流值,构造一个虚拟电阻来帮助系统收敛。设估计得到的直流电机反电动势系数为
 ,电枢电阻为
,电枢电阻为
 ,而构造的虚拟电阻为
,而构造的虚拟电阻为
 ,则可以得到基于物理系统特性的直流电机转矩控制框图,如图3-5所示。从图3-5中可以看到,若
,则可以得到基于物理系统特性的直流电机转矩控制框图,如图3-5所示。从图3-5中可以看到,若
 ,
,
 ,则电枢电流的响应速度由
,则电枢电流的响应速度由
 决定,
决定,
 越大,相当于阻感系统即式(3-18)的电阻值越大,由式(3-19)可知,系统响应就越快。
越大,相当于阻感系统即式(3-18)的电阻值越大,由式(3-19)可知,系统响应就越快。
从另一角度,
 和
和
 在数学计算上与反馈增益没有区别,相当于电流环采用了
在数学计算上与反馈增益没有区别,相当于电流环采用了
 的负反馈增益。对于一阶线性系统,根据根轨迹图,反馈增益
的负反馈增益。对于一阶线性系统,根据根轨迹图,反馈增益
 越大,系统极点越远离原点,系统响应越快。所以,对于控制理论,在工程应用中是可以找到其相应的物理背景和规律的,这对于控制系统的设计和控制参数的标定非常重要。所以上述讨论的主要目的也是在阐述电流闭环控制中反馈增益的电阻物理特性,以期让读者更为清晰地理解和设计直流电机的电流闭环控制算法。以上讨论的这种反馈控制方法也称为主动阻尼控制。
越大,系统极点越远离原点,系统响应越快。所以,对于控制理论,在工程应用中是可以找到其相应的物理背景和规律的,这对于控制系统的设计和控制参数的标定非常重要。所以上述讨论的主要目的也是在阐述电流闭环控制中反馈增益的电阻物理特性,以期让读者更为清晰地理解和设计直流电机的电流闭环控制算法。以上讨论的这种反馈控制方法也称为主动阻尼控制。
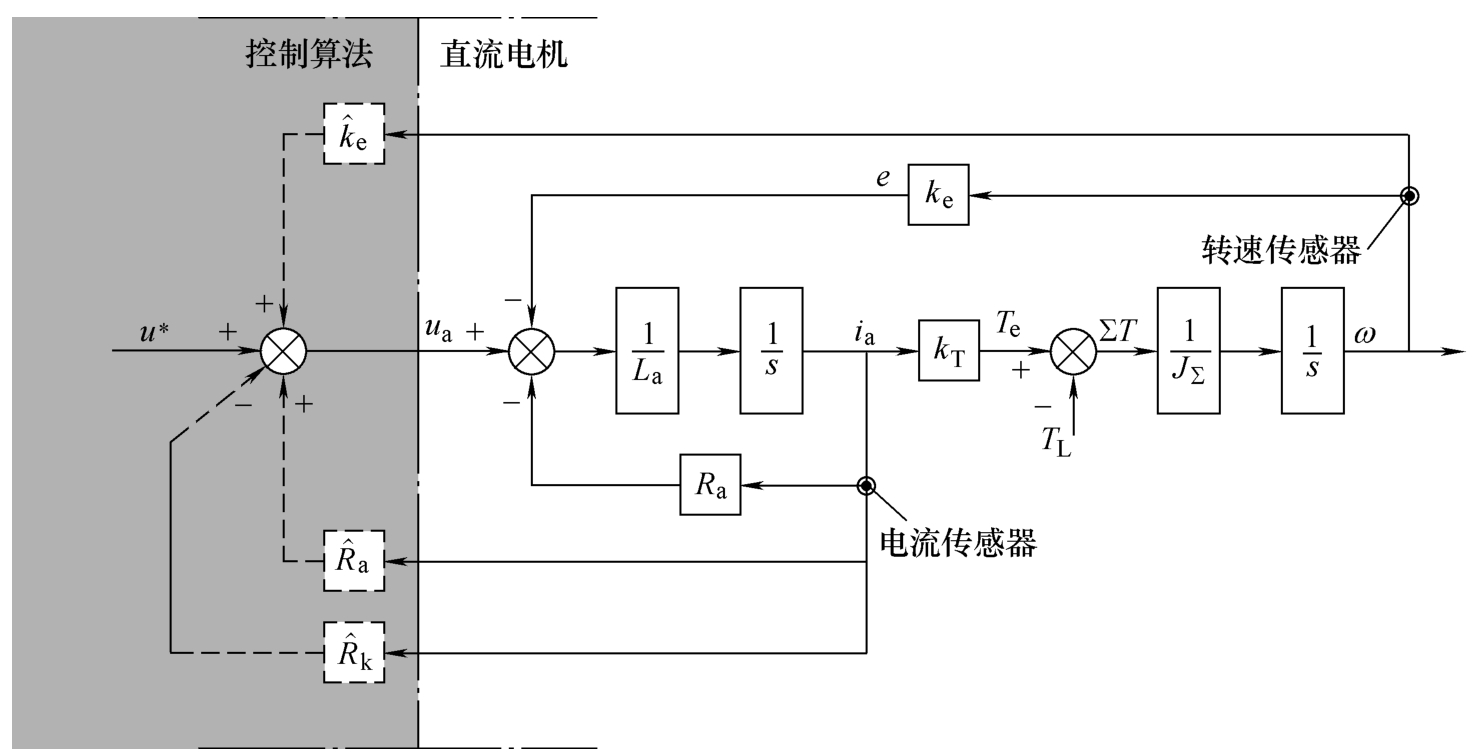
图3-5 直流电机转矩控制框图
在实际直流电机系统中,反电动势系数的估计值
 与电枢电阻的估计值
与电枢电阻的估计值
 不可能完全准确,但这并不意味着以上讨论的控制算法是无效的,设二者的估计误差表示为
不可能完全准确,但这并不意味着以上讨论的控制算法是无效的,设二者的估计误差表示为

此时对反电动势和电阻压降的补偿结果误差可以表示为

将以上两项分别看作系统的干扰,可以得到系统控制框图,如图3-6所示。
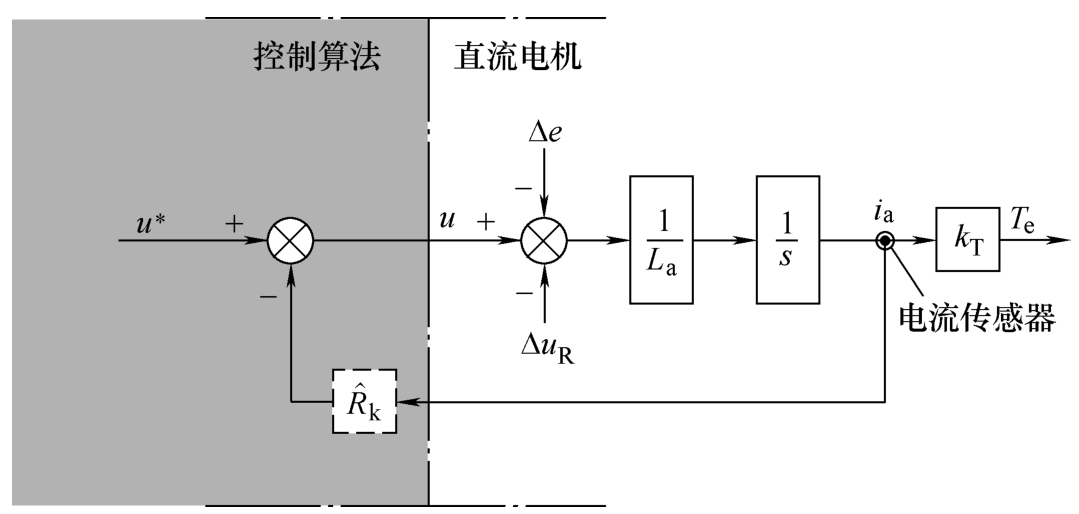
图3-6 反电动势与电枢电阻估计误差对转矩控制的影响
从图3-6中可以看出,即使反电动势系数与电枢电阻估计不准确,其影响也可以等效为电枢电压上的干扰。通过控制理论的推导可以发现,这些干扰在闭环控制中是可以有效抑制的,而且由于干扰幅度较小,对瞬态控制性能的影响也较小。所以,即使存在系统参数估计不准确或参数变动的情况,以上讨论的控制思想依然是有效的。
为了尽可能抑制系统中由不同因素(系统参数估计不准确,执行器、传感器特性等因素)引起的干扰,控制系统必须具备抑制干扰的能力。固定比例的闭环增益往往无法实现对干扰的抑制,因为增益越高,对干扰的抑制能力越强,但高频稳定性越差。这一矛盾决定了需要在控制器中加入低频高增益、高频低增益的环节,最典型的实现方式就是积分器。积分器的稳态增益无穷大,且增益随着频率的升高线性衰减,所以可以在保证系统稳定的前提下消除系统的稳态误差。综合直流电机转矩控制电流闭环高频快速响应和低频抑制干扰的需求,将主动阻尼和积分器相结合,就组成了工程上最为常用的PI控制器,如图3-7所示。
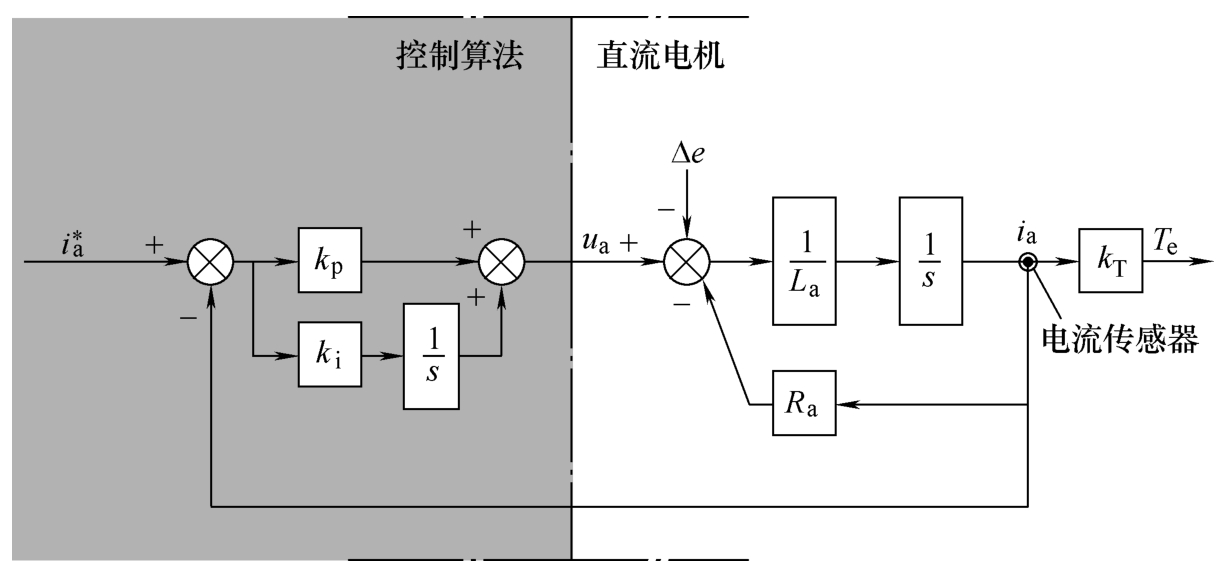
图3-7 采用PI控制器的转矩控制框图
图3-7中,
k
p
为比例系数;
k
i
为积分系数。比例系数
k
p
与图3-5中的反馈增益
 是没有本质区别的。考虑到电流瞬态响应过程,此时忽略积分项
k
i
的影响,若二者计算得到的电枢电压相等,则
是没有本质区别的。考虑到电流瞬态响应过程,此时忽略积分项
k
i
的影响,若二者计算得到的电枢电压相等,则

可见两种表达形式的闭环增益是完全相同的,即都为独立的闭环增益。若要求二者数值相等,则有

但由于目标值不同,所以在前馈回路上表达式略有区别,即

可以看到,式(3-26)就是欧姆定律的形式,所以控制算法的物理意义也是非常清晰的。
积分系数 k i 主导系统的低频响应。当系统稳定时,积分环节的增益无穷大,即积分环节的输入为零,可得

从而实现电流控制的稳态误差为零,其传递函数推导的结果为

当
s
=0时,可得与式(3-27)相同的结论。同时,传递函数分母一次项系数(
k
p
+
R
a
)也与前述虚拟电阻
 在式(3-25)中的表达式是一致的。同理,推导电枢电流
i
a
对干扰Δ
e
和Δ
u
R
的响应传递函数,可得
在式(3-25)中的表达式是一致的。同理,推导电枢电流
i
a
对干扰Δ
e
和Δ
u
R
的响应传递函数,可得

当 s =0时,电枢电流对干扰的响应为零,即该系统在稳态时可以完全抑制模型参数及反电动势等因素对电枢电流控制造成的影响。
本节中介绍的转矩控制算法同时需要转速传感器和电流传感器,系统结构相对复杂,但物理概念清晰,转矩响应速度可以精确控制。利用反电动势补偿,可以实现转矩和转速动态性能的解耦控制。
从实际应用的角度,单独采用电流传感器也可以进行转矩控制,只不过此时反电动势的影响需作为干扰处理,但由于PI控制器要通过反馈消除该项干扰,所以相应的电流响应速度会受到一定的影响。近年来兴起的无速度传感器技术可以在只有电流传感器的情况下,利用直流电机模型,估计直流电机转子转速,利用该项估计的转速,同样可以实现反电动势补偿。
如果只采用转速传感器,除非负载模型精确,否则一般很难做到精确的转矩控制。因为反电动势的大小决定了直流电机电能与机械能转换的效率,为了提高效率,一般直流电机的反电动势远远大于电枢电阻压降,所以利用转速(反电动势)信息估计电流信息相当困难。但是,由于直流电机系统的机械惯性环节往往远大于电磁惯性环节,此时转矩控制的瞬态过程是可以忽略的。所以,如果只关注直流电机的转速控制,且对转矩响应要求较低,则一些应用中可以不采用电流闭环控制。
直流电机的非线性因素同样会在一定程度上影响直流电机的转矩控制性能,包括电枢绕组发热引起的电枢电阻阻值变化、电枢反应引起的转矩系数下降等。考虑到这些非线性因素,要获得准确的直流电机转矩输出,还需要根据实际的物理背景,设计更为复杂的补偿算法。