
下载掌阅APP,畅读海量书库
立即打开



振动是汽车上常见的物理现象,大多时刻是不受欢迎的。例如它的存在使汽车精密仪器的灵敏度下降,各类机械结构之间发生碰撞,影响汽车零部件的正常运转,进而引发振动噪声,影响乘客的乘坐体验。但汽车的结构比较复杂,仅靠设计是难以彻底解决振动问题的,当汽车中某个系统出现不符合要求的振动时,就需要采取减振措施。研发人员在汽车减振方面做了大量研究,主要集中在隔振、阻尼消振和减振三个方面。
汽车在行驶过程中由于受到不平路面的冲击以及零部件自身动作的影响,会产生较大的振动。为了保证汽车的行驶性能和各部件的正常工作,需要进行振动隔离,简称隔振。隔振可分为两类:一类是主动隔振,即用隔振器将振动隔离开;另一类是被动隔振,即将需要保护的设备用隔振器隔离开。这里的隔振器通常是由弹簧和阻尼器组成的模型系统。在实际应用中隔振器通常选用合适的弹性材料和阻尼材料,如木材、橡胶、轮胎、沙子等。比如在汽车中通常将橡胶减振产品用于动力总成、车身、底盘等各类结构件之间的弹性连接和缓冲。图1-16所示是弹簧隔振器和汽车上的吸振器。
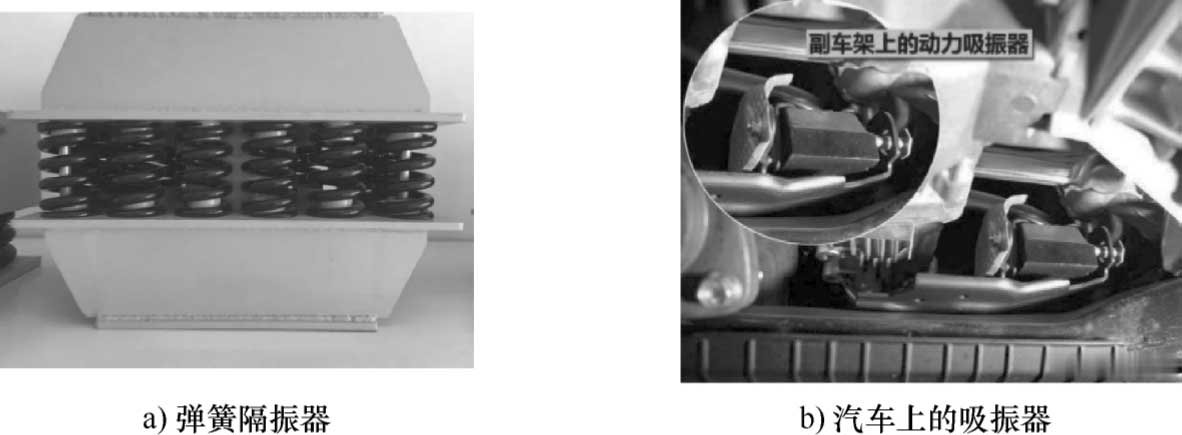
图1-16 隔振的应用
高架桥隔声墙是一个隔声设施,其目的是遮挡声源和接收者之间的直达声。在声源和接收者之间设置隔声墙,当噪声遇到隔声墙时就会发生反射、透射和绕射三种现象,通过阻止直达声和减弱透射声达到有效降噪的目的,减弱接收者所在的一定区域内的噪声影响。声屏障分为半封闭声屏障和全封闭声屏障,半封闭声屏障通过吸收和反射噪声波的原理来实现降噪,但是半封闭声屏障仍然会有部分直达声传到声屏障以外。全封闭声屏障能够把声波“封闭”起来,例如,如果将车辆包在声屏障内部,就能够阻挡所有到车内的直达声。大部分的噪声波都被声屏障吸收或者反射,降噪效果尤为明显。
阻尼消振(也称为阻尼减振)方法是指利用阻尼器或阻尼材料来吸收或减小结构振动的能量,以达到减小结构振动幅度和防止结构损伤的目的。阻尼减振技术能降低结构或系统在共振频率附近的动响应强度。阻尼减振有两种方式:一种是集中力阻尼器,如各种成型的阻尼器;另一种是分布式阻尼器,如各种黏弹性阻尼材料以及复合材料等,主要应用于薄板和薄壳等薄壁结构和不宜施加集中阻尼力的系统,例如汽车地板上的沥青阻尼片,如图1-17所示。
阻尼具有消耗系统振动能量的特性,能使自由振动迅速衰减,能够降低强迫振动的共振振幅和避免例如发动机喷油阀产生的自激振动。阻尼越大,消耗振动的能量就越多,减振的效果越好。阻尼器的减振效果与运动件的速度和行程有关。运动越快,行程越长,它消耗的能量越多,减振效果越好,因此阻尼器一般都安装在与运动件相对运动最大之处,比如汽车底盘中的悬架系统。
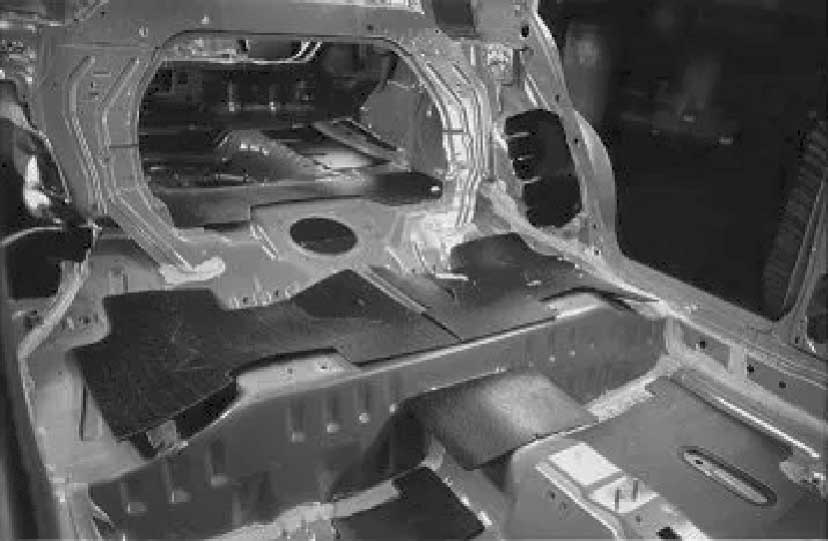
图1-17 铺在汽车地板上的沥青阻尼片
1940年7月1日,位于美国华盛顿州的悬索桥塔科马海峡大桥建成通车。可就在同年11月7日,刚刚建成通车的四个月后,大桥戏剧性地被一阵微风“摧毁”了(图1-18)。在大桥彻底倒塌前就已经发生过多次浮动,驾驶人在桥上行驶的感觉就像在水面上一样,因此,大桥被当地人起名为“舞动的格蒂”。而造成大桥倒塌的原因是采用了较薄的主梁,桥梁在风力的作用下形成了严重的卡门涡街效应,进而引起了桥梁共振。
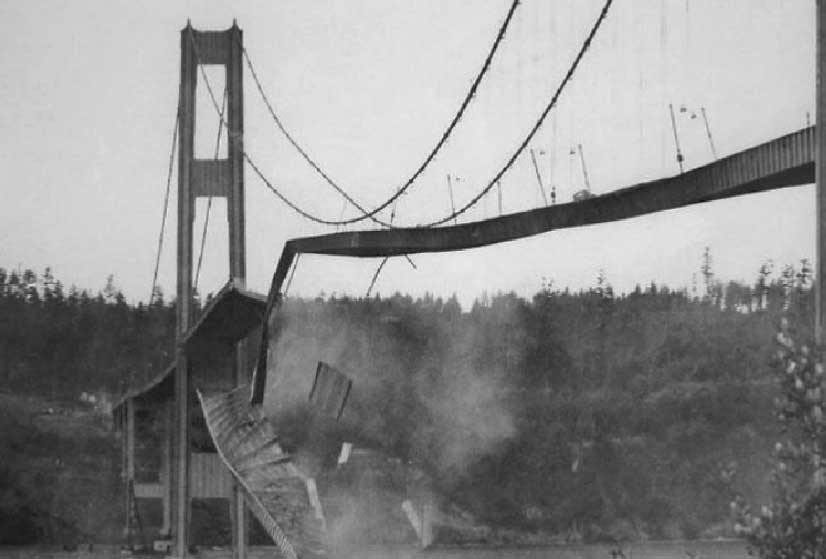
图1-18 塔科马海峡大桥坍塌现场
振动控制是一种减少机械结构振动的技术,它包括有源振动控制和无源振动控制两种方式。
有源振动控制是指利用外部控制系统向机械结构输送外部能量,并通过调节系统的频率、振幅、相位等参数来减少振动。振动有源控制可分为主动控制和半主动控制。
主动振动控制系统模型如图1-19所示。主动控制是指在机械结构振动发生之前,通过向机械结构施加力或力矩等外部调节信号来减少振动。主动控制需要一个能够产生预期输出的控制器,并且在适当时刻施加外部调节信号来补偿机械结构振动。主动控制器通常采用先进的电子技术和传感器来实时监测机械结构振动,并根据振动信息输出控制信号控制振动。这种控制需要消耗能量,而能量要靠能源来补充,通常有开环控制与闭环控制。闭环控制又称为反馈控制,是目前用得比较多的一种控制方法。主动式动力减振器有两种形式:一种是根据干扰力频率主动改变减振器的参数,如弹簧的刚度系数或阻尼器的阻尼系数,使减振器始终处于反共振状态,比如汽车上的半主动悬架系统;另一种是通过反馈主动减振器对需要减振的结构或系统产生最有利的振动抑制,比如汽车上的主动悬架系统。
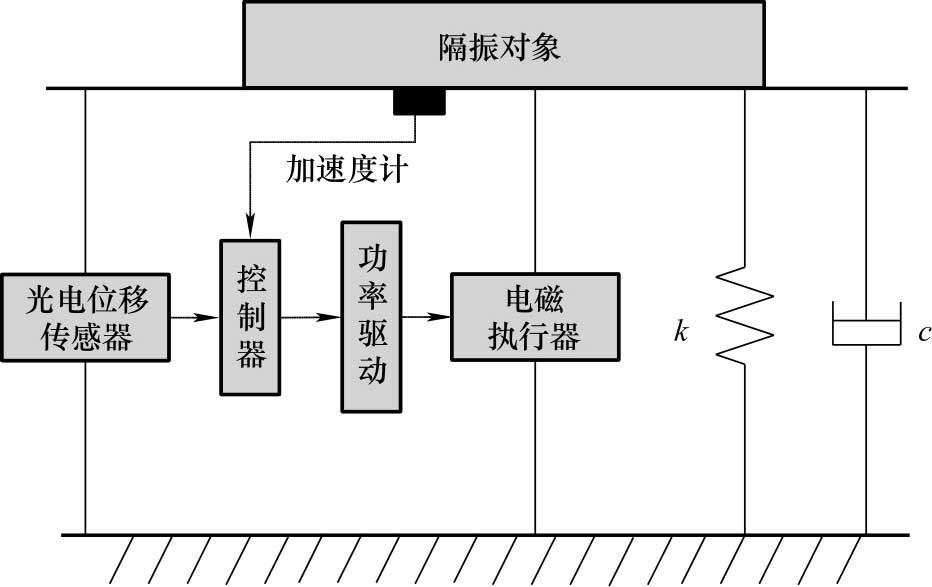
图1-19 主动振动控制系统模型
主动振动控制有很多优点:减振效果好,能适应不可预知的外界扰动以及结构参数的不确定性,对原结构改动不大,调整方便,既适用于干扰力频率变化较大的场合,也适用于低频区域的减振。
半主动控制是指通过一些“智能材料”,如压电材料、磁流变材料等,在机械振动发生后在材料上施加电场或者磁场,使其能够改变其自身特性来进行振动控制。半主动控制既可以减少机械结构振动,又能节约外部的能量输入,并且不需要外部控制器。
综合来看,有源振动控制可以有效地减少机械结构振动并提高机械结构的使用寿命。但是,有源振动控制的实施需要复杂的控制系统和先进的控制技术,需要依靠高精度的传感器和信号处理技术来实现实时控制,成本较高。因此,在实际应用中需要权衡其成本与效益,选择适合的振动控制方法。
无源振动控制是指在减少机械结构振动的过程中,不涉及外部能量输入,只利用机械本身的结构和物理特性进行控制,如图1-20所示。振动无源控制的方法包括调整机械结构的质量均衡、调整杆件的刚度、改变支撑方式等。
1)质量均衡是指调整机械结构内部质量的分布,使得机械结构减少振动。通常需要对机械结构进行精细的质量平衡调整,以便使机械结构的振动模态更加合理。
2)调整杆件的刚度是指利用机械结构的支撑杆件来调节机械结构的刚度,以减少振动。这种方法通常需要在机械结构中加入调节机构,以帮助机械结构实现精细的刚度调节。
3)改变支撑方式是指通过改变机械结构的支撑方式(如改变支撑点的位置、设置支座等)来改变机械结构的振动模态,从而减小振动幅度。
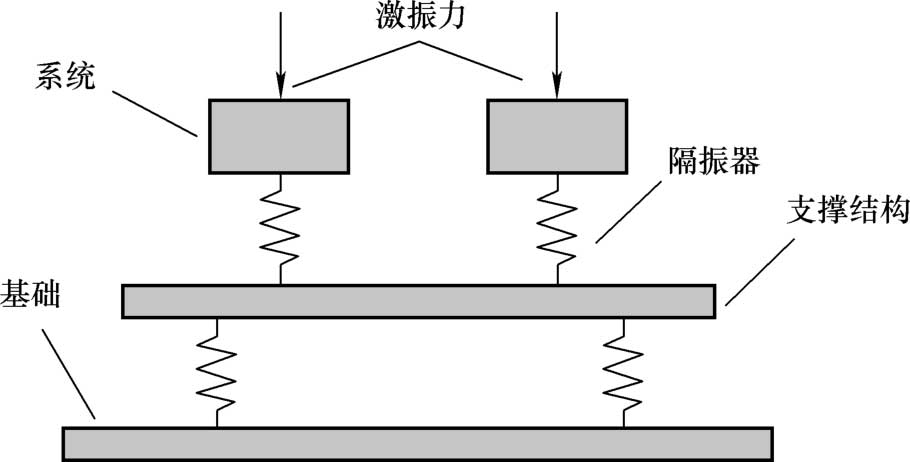
图1-20 无源振动控制模型
无源振动控制的特点是不需要外部能量输入,减少了控制系统的成本和复杂度,但其控制效果依赖于机械本身的特性,因此实施难度较大,需要进行复杂的工程设计和优化。在实际应用中,需要根据具体的机械结构和控制要求选择适当的振动无源控制方法。
目前,汽车悬架已进入到利用微处理器进行控制的时代,运用较优的控制方法得到高性能的减振效果,且使能耗尽可能低是汽车悬架控制发展的主要方向。汽车悬架振动控制系统大多由传感器获取车身绝对速度、车身对车轮的相对速度、车身的加速度等信号,经计算机处理并发出指令进行控制,由电液控制阀或步进电机等执行机构调节减振器的阻尼系数或控制力。
常用的控制方法有经典PID控制、LQR控制、自适应控制、最优控制和模糊控制。
经典PID控制无须知道被控对象的有关数学模型,只要按照经验实时调整调节器参数就可以获得比较满意的结果,但是这种方法对于被控对象参数的变动非常敏感。
如果所研究的系统是线性的,且性能指标为状态变量和控制变量的二次型函数,则最优控制问题称为线性二次型问题。而线性二次型调节器(Linear Quadratic Regulator,LQR),是求解线性二次型问题常用的求解方法。其控制对象是现代控制理论中以状态空间形式给出的线性系统,而目标函数为对象状态和控制输入的二次型函数。LQR理论是现代控制理论中发展最早也最为成熟的一种状态空间设计法。特别可贵的是,LQR可得到状态线性反馈的最优控制规律,易于构成闭环最优控制。
自适应控制策略的基本控制方法是LQG(Linear Quadratic Gaussian)控制,对车辆参数以及路面输入的变化进行了综合考虑,从而实时调整反馈参数。汽车悬架控制系统中应用的自适应控制方法有两种控制策略:自校正控制和模型参考自适应控制。自校正控制就是把控制器参数整定和受控对象参数在线识别相结合。模型参考自适应控制就是指在车辆自身参数状态或者外界激励条件出现变化的时候,被控车辆的振动输出还可以跟踪所选定参考模型。
最优控制是首先确定一个明确的目标函数,通过一定的数学方法计算出使该函数取极值时的控制输入。一般情况下,目标函数的确定要靠经验,最优控制的解只有在极少数情况下才能得出解析解,有的可以通过计算机得到数值解。在汽车悬架系统上应用的最优控制方法较多,常用的有线性最优控制、鲁棒最优控制和最优预见控制等。
模糊控制是一种非线性控制,使用模糊推理构造主动以及半主动悬架的控制规则,通过计算机模拟的方法来分析并控制车身的俯仰和垂直运动。半主动悬架控制系统中模糊控制方法的应用还无法从理论层面对其进行判定,只可以通过系统实测来对其进行判定。