
下载掌阅APP,畅读海量书库
立即打开



环境感知作为自动驾驶汽车的基础环节,需要通过多种车载传感器来采集周围环境的基本信息。车载传感器就如同自动驾驶汽车的眼睛,例如摄像头和雷达系统的融合,可以提供动态物体的外形、速度和距离等信息。
目前应用于自动驾驶汽车的车载传感器主要有毫米波雷达、超声波雷达、视觉传感器/摄像头、激光雷达、惯性导航。用这些传感器的不同融合可实现驾驶辅助系统(ADAS),如前向碰撞预警系统、车道偏离预警系统、盲区监测系统、车道保持辅助系统、自动紧急制动系统、自适应巡航控制系统、自动泊车辅助系统、自适应前照明系统、夜视辅助系统、平视显示系统、全景泊车系统等,如图1.5所示。
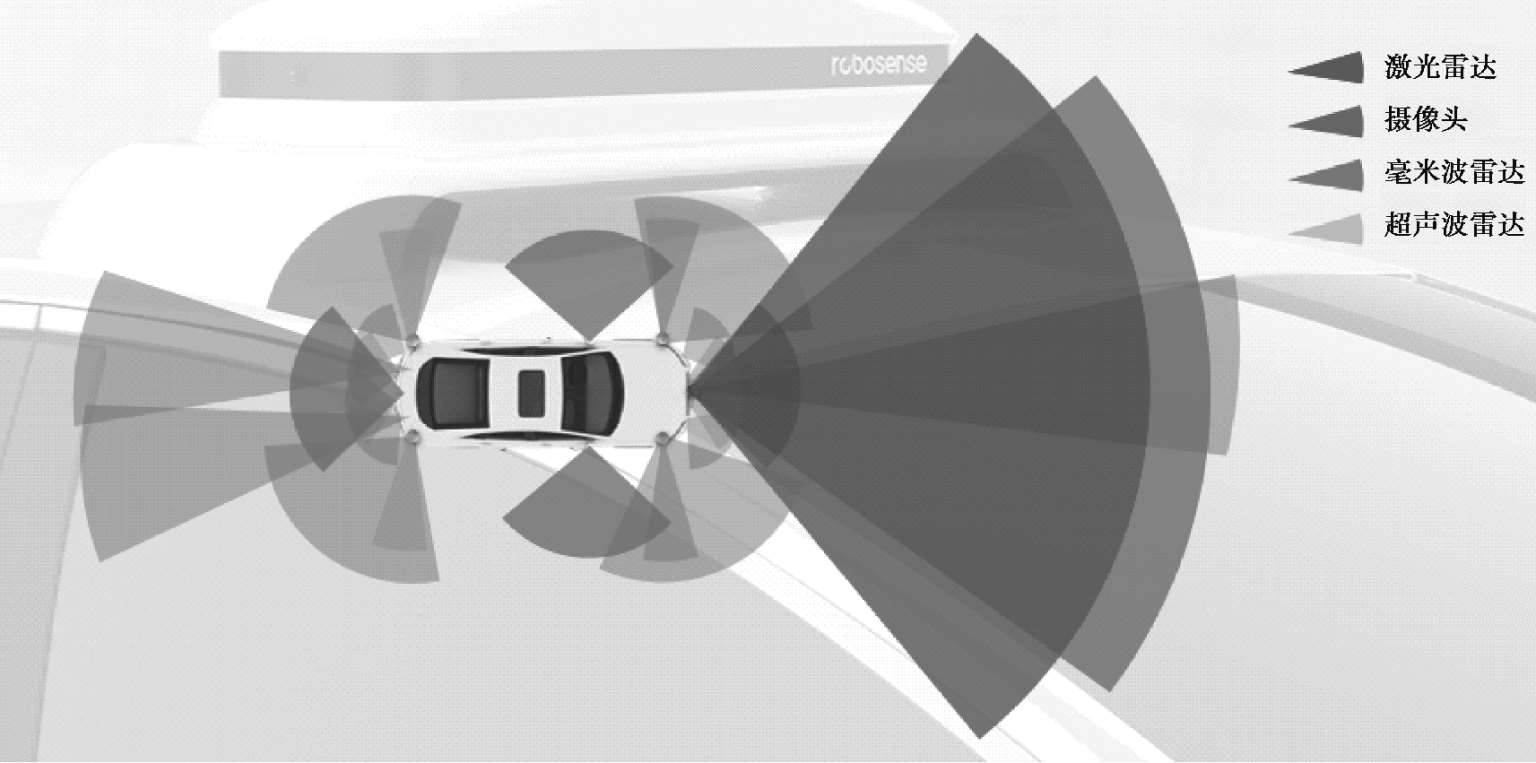
图1.5 汽车传感器配备图
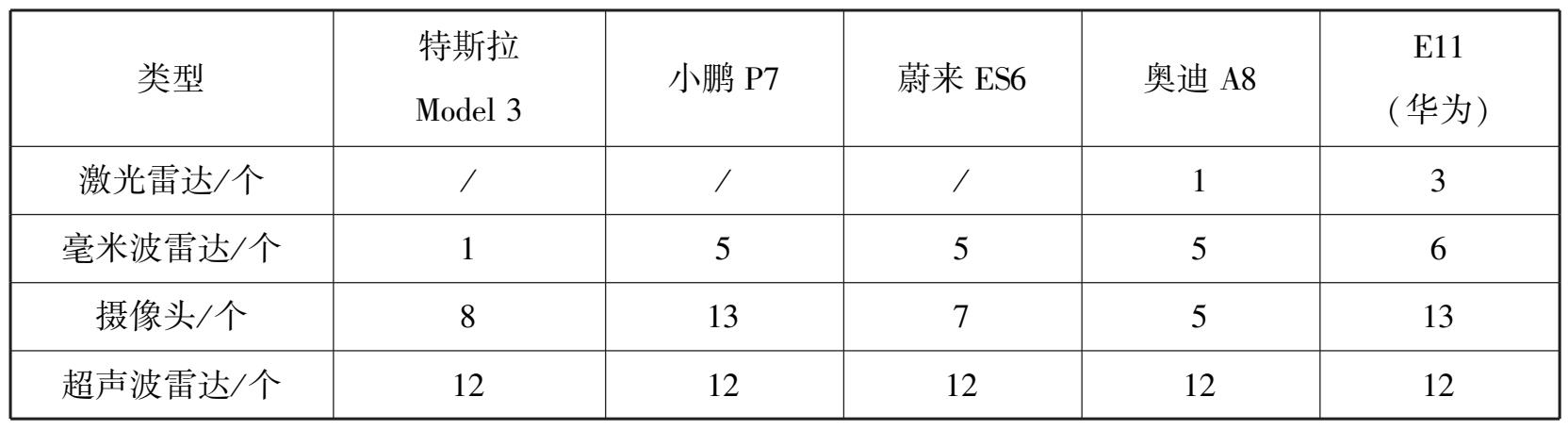
自动驾驶汽车环境感知核心技术在传感器。当前主流车企自动驾驶环境感知方案为1个前视摄像头+4个环视摄像头+12个超声波雷达+3 ~ 5个毫米波雷达。随着激光雷达优势显现,部分车型开始配备激光雷达。车企常配备的车载传感器类型见表1.4。
表1.4 各类传感器配备情况
如小鹏P7,各类传感器位置如图1.6所示。它通过配备的车载传感器可对远、中、近三个区域进行感知。车辆通过传感器获取周边环境的几何信息与语义信息,准确“认识”车道线、车辆类型、交通标识、其他道路使用者以及车位线等信息,给车辆“大脑”送去更全面可靠的信息。

图1.6 小鹏P7传感器配备图
图1.7所示的奥迪A8,能实现自动驾驶级别L3,为此配备了4个鱼眼摄像头、12个超声波雷达、4个中程毫米波雷达、1个远程毫米波雷达、1个激光雷达、1个前视摄像头。其中,4个鱼眼摄像头用于360°环视系统,12个超声波雷达用于自动泊车系统。
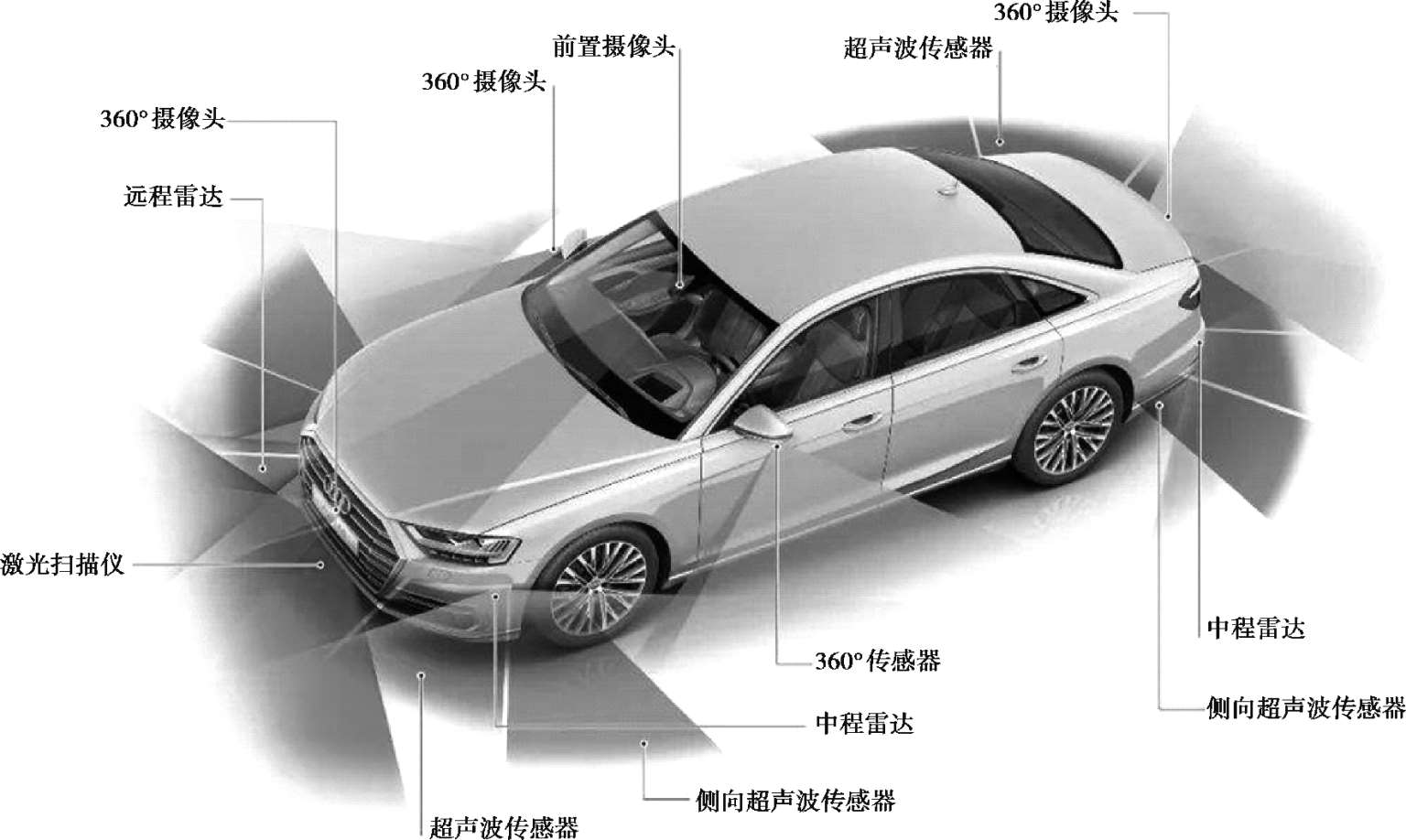
图1.7 奥迪A8配备的车载传感器
毫米波雷达因其能够准确地测量自动驾驶汽车与周边车辆之间的距离,所以应用于诸多辅助驾驶系统。毫米波雷达频率目前主要包括24 GHz和77 GHz两种,如图1.8所示。24 GHz探测距离在60 m以内,又称近远距离雷达(SRR);77 GHz探测距离为100 ~ 250 m,又称远距离雷达(LRR)。
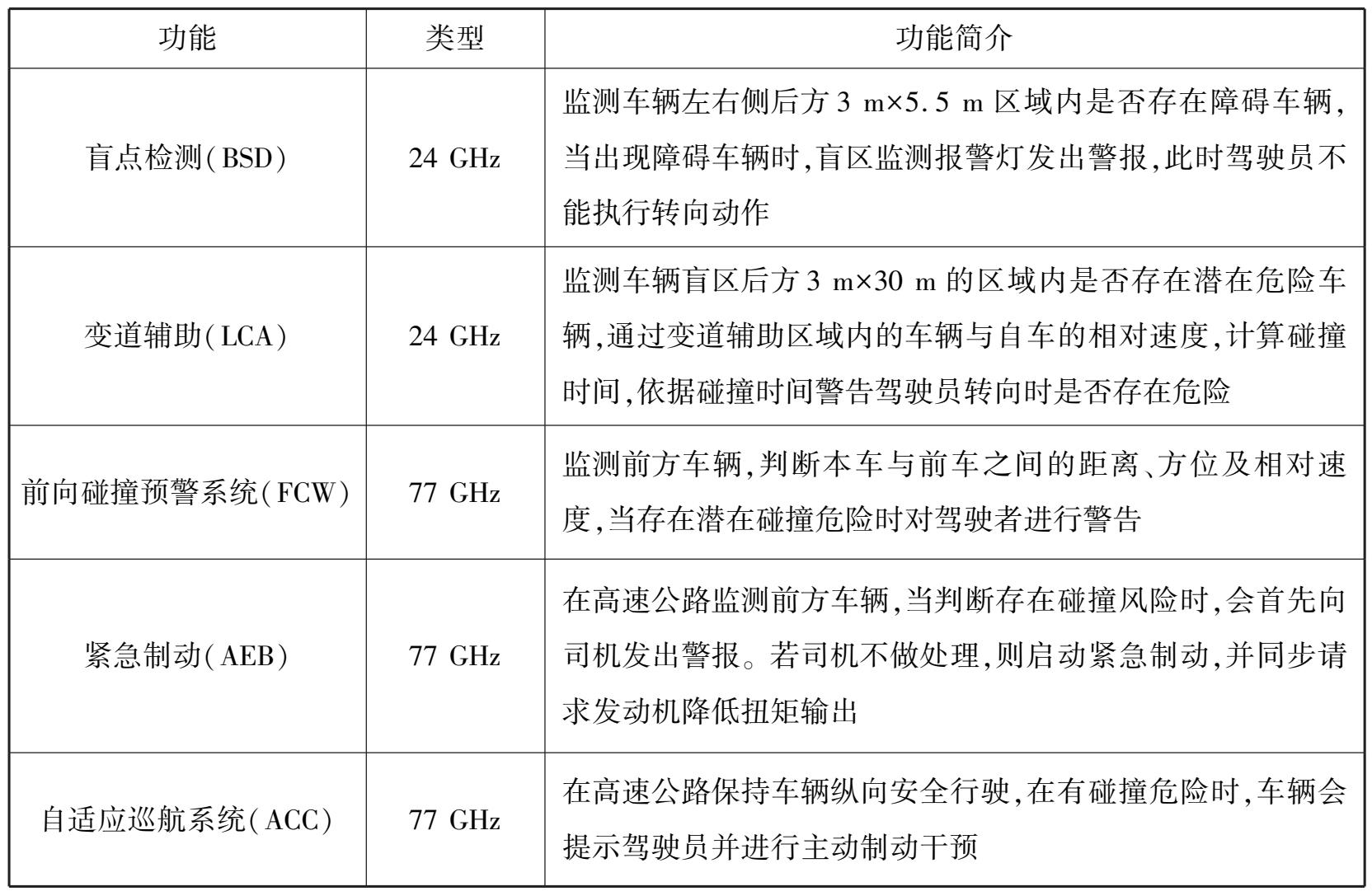
毫米波雷达在自动驾驶中的应用见表1.5。

图1.8 24 GHz(左)和77 GHz(右)毫米波雷达产品
表1.5 毫米波雷达应用
无论是中国车企还是外国车企,都在其中高端车型上都配备了毫米波雷达。如图1.9所示,奔驰S级配备7个毫米波雷达:1个LRR(远距离雷达)和6个SRR(近距离雷达)。作为自动驾驶系统的核心传感器,毫米波雷达逐步成为各个车型的标配。
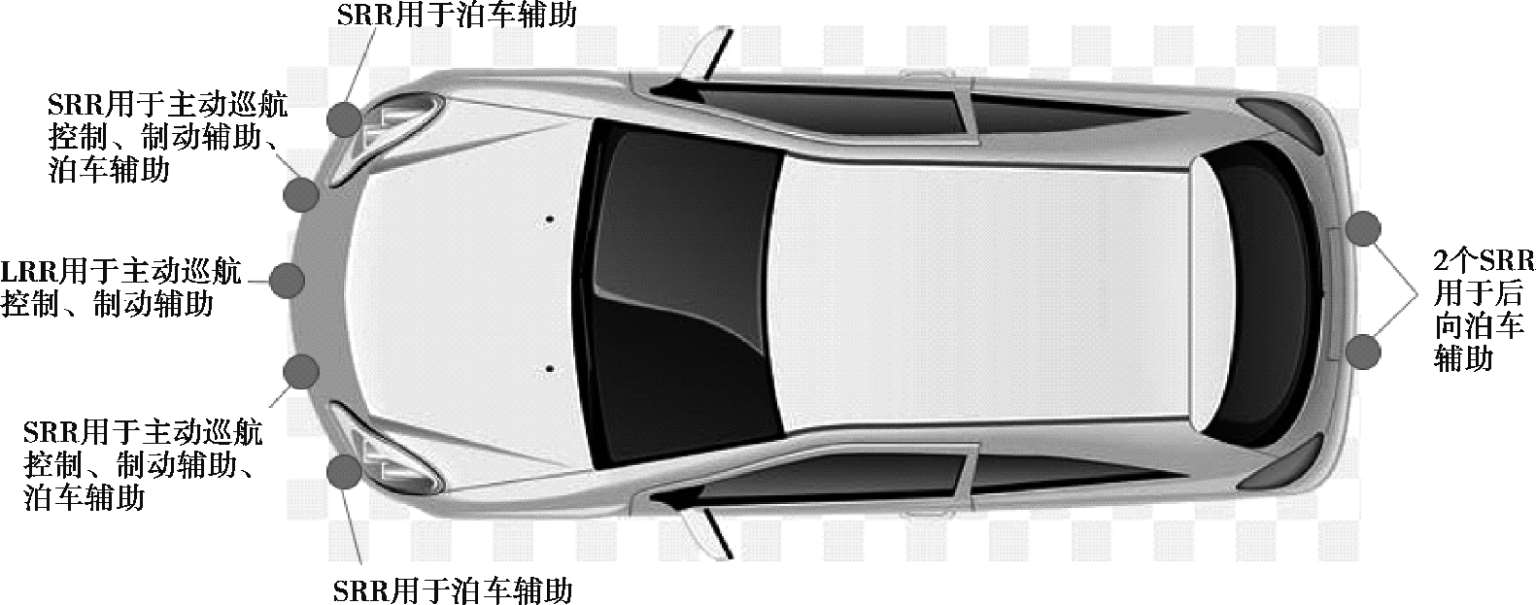
图1.9 奔驰S级毫米波雷达配备
超声波雷达因其特性能测算0.15 ~ 5 m内障碍物的距离。常见的超声波有两种:第一种是安装在汽车前后保险杠上,用于测量汽车前后障碍物的倒车雷达,称为超声波驻车辅助传感器(UPA),探测距离为0.15 ~ 2.5 m;第二种是安装在汽车侧面,用于测量侧方障碍物距离的超声波雷达,称为自动泊车辅助传感器(APA),探测距离为0.3 ~ 5 m。
超声波雷达如图1.10所示。
一套倒车雷达系统需要在汽车后保险杠内配备4个UPA超声波传感器。自动泊车系统需要在倒车雷达系统基础上增加4个UPA、4个APA超声波传感器,构成前4(UPA)、侧4(APA)、后4(UPA)的布置格局,如图1.11所示。

图1.10 超声波雷达产品示意图
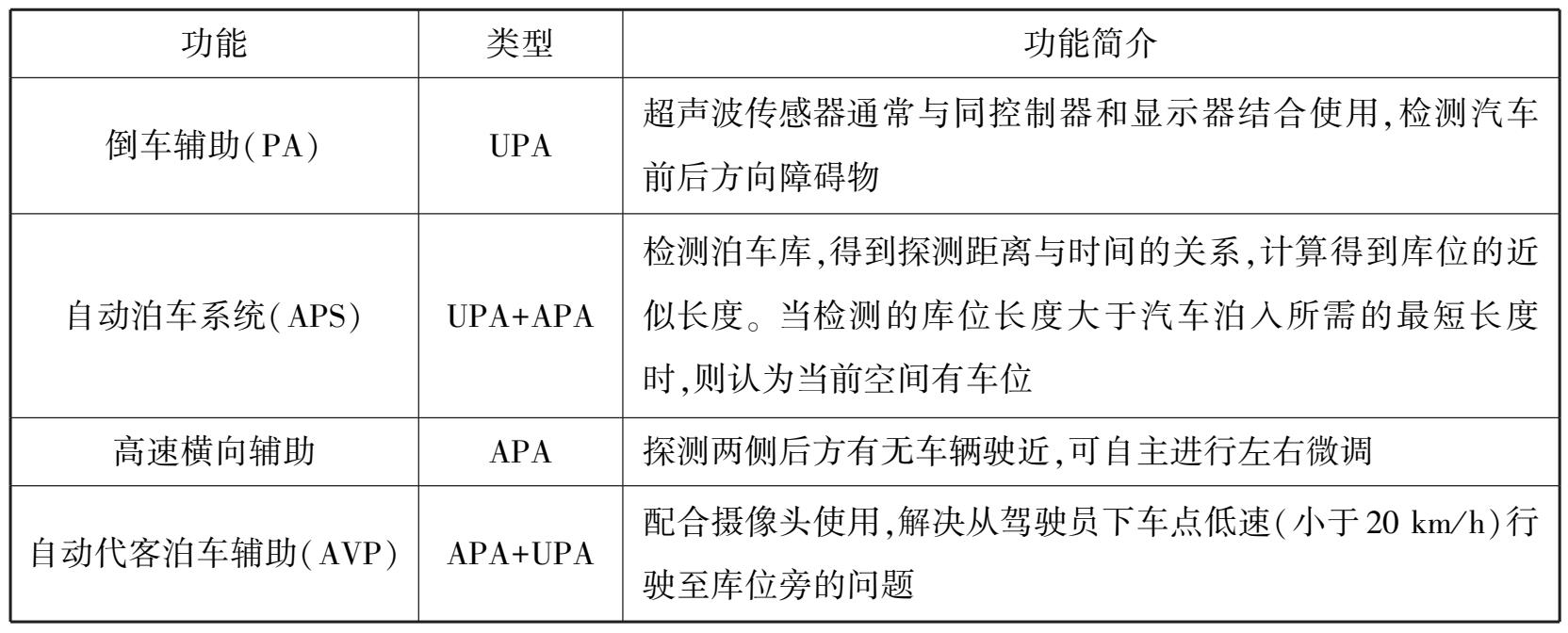
超声波雷达在自动驾驶中的应用见表1.6。
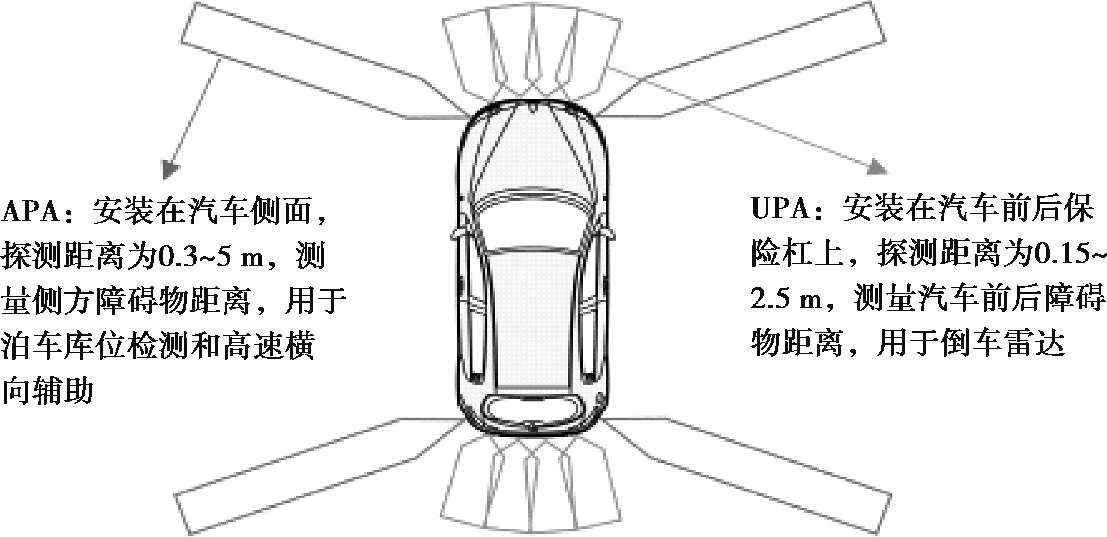
图1.11 超声波雷达安装示意图
表1.6 超声波雷达在自动驾驶中的应用
视觉传感器主要有单目摄像头、双目摄像头、三目摄像头和环视摄像头,主要通过镜头和图像传感器实现图像信息的采集功能。
单目摄像头仍是主流。伴随着360°全景停车和环视系统的发展,未来单辆车载摄像头预期达到6个以上,包括1个前视摄像头、1个后视摄像头和4个环视摄像头。
摄像头按位置不同可分为前视、侧视、后视及内置摄像头,如图1.12所示。

图1.12 摄像头按位置分类
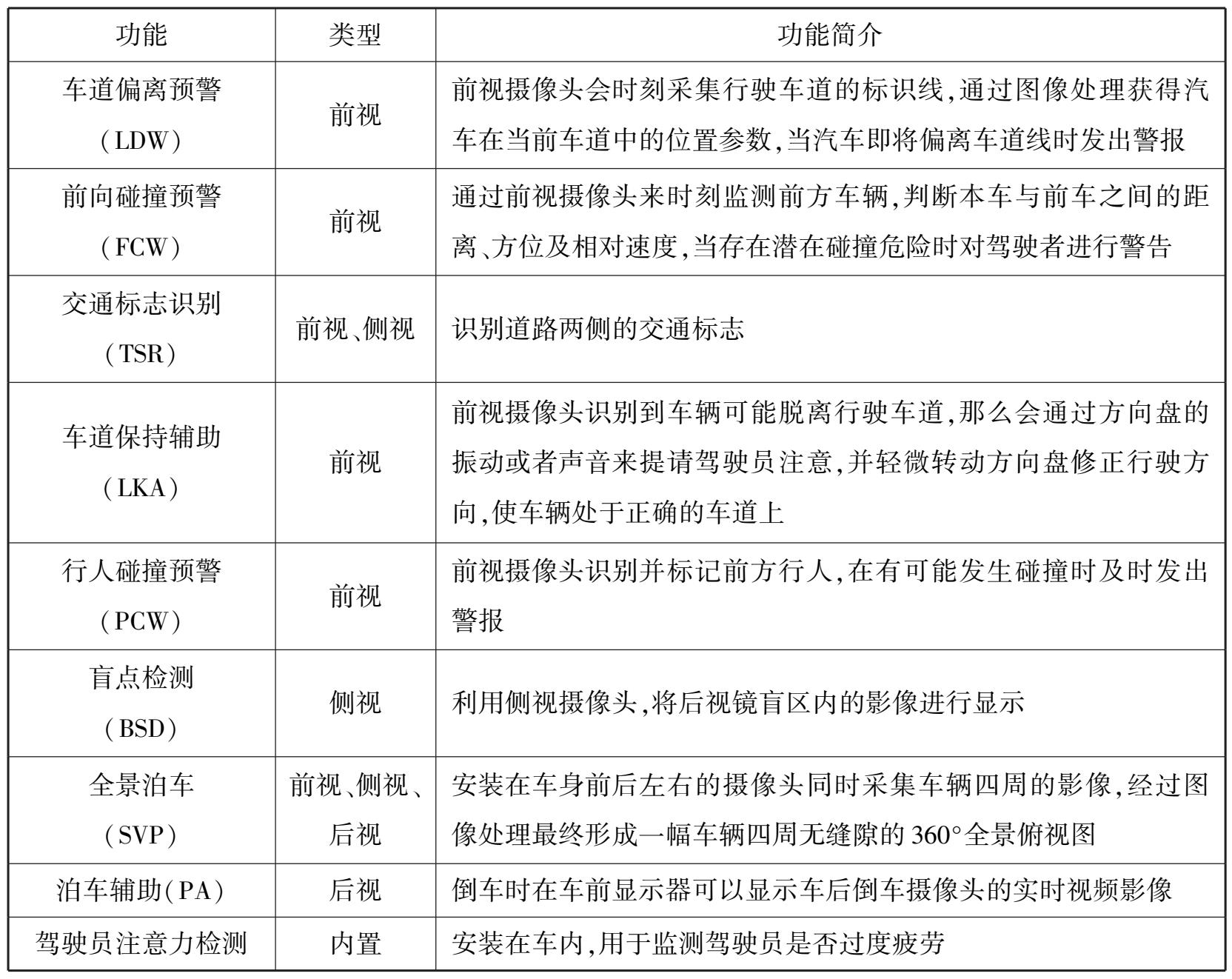
摄像头在自动驾驶中的应用见表1.7。
表1.7 摄像头在自动驾驶中的应用
在5G+AI趋势下,激光雷达作为“机器设备之眼”,将适应3D感知和交互需求大幅提升的趋势,迎来快速成长。尤其在自动驾驶领域,车载激光雷达将成为感知层的核心,从技术上,激光雷达将推动L3+自动驾驶的实现。
激光雷达按照扫描方式有无机械转动部件可分为三类:机械式、混合固态以及固态,如图1.13所示。混合固态分为MEMS、转镜,纯固态分为相控阵OPA、Flash。
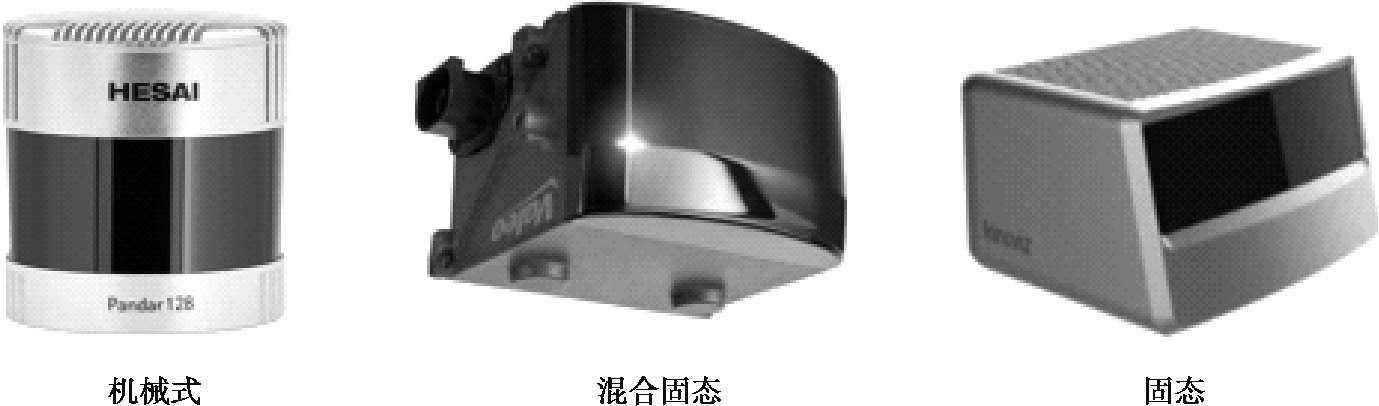
图1.13 激光雷达产品示意图
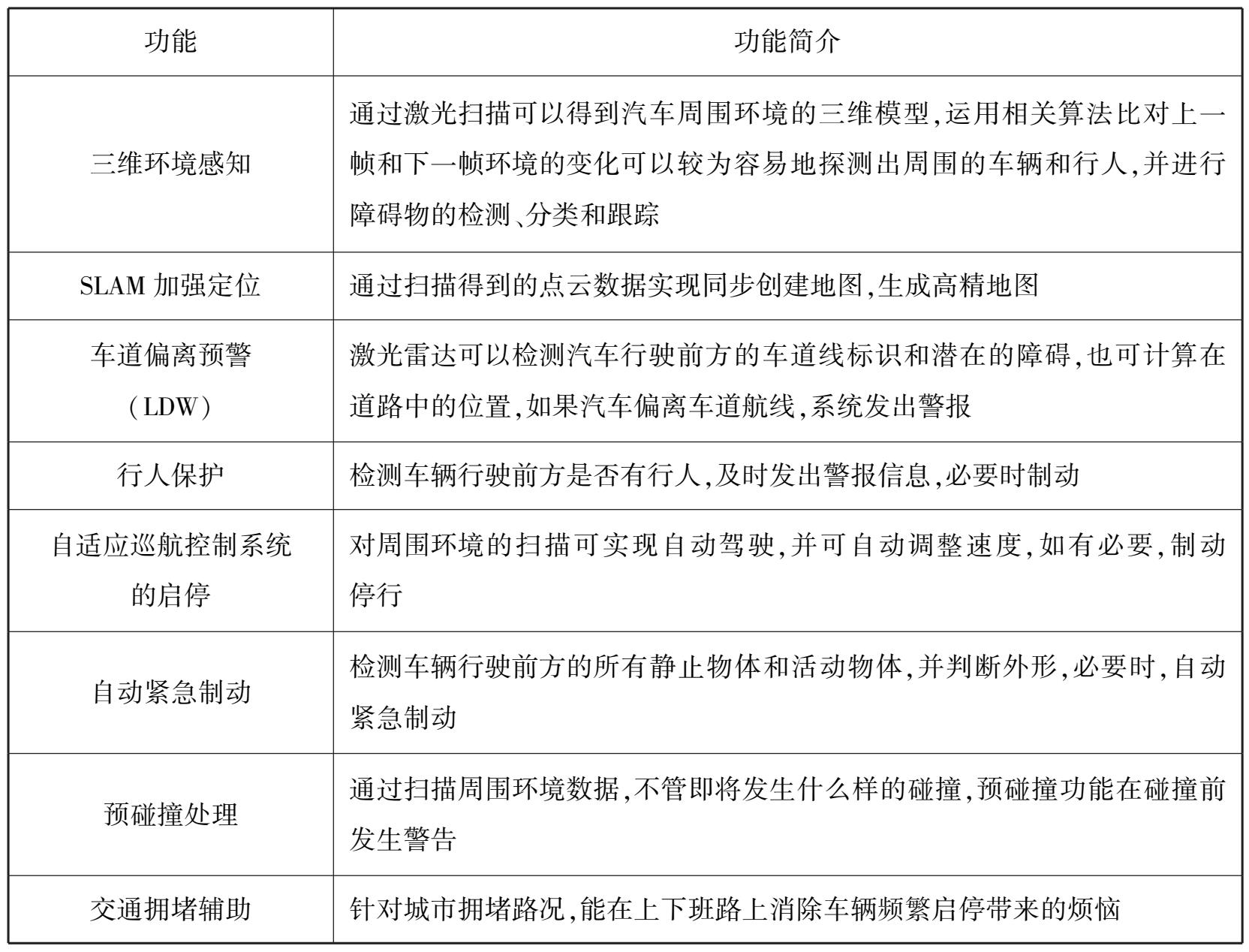
激光雷达因其3D传感性能优越,在自动驾驶中的应用见表1.8。
表1.8 激光雷达在自动驾驶中的应用
惯性导航是一种不依赖于外部信息,也不向外辐射能量的自主式导航系统,是以陀螺仪和加速度计为敏感件的导航参数解算系统。该系统通过陀螺仪的输出建立导航坐标系,根据加速度计解算出运载体在导航坐标系中的速度和位置。
在自动驾驶技术中,高精地图、全球卫星导航系统和惯性导航系统相互配合、相辅而成,共同确定车辆的绝对位置。其中,全球卫星导航系统依赖卫星信号可以提供全局的定位信息,惯性导航不依赖外界信息提供相对的局部信息。将全球卫星导航系统和惯性导航系统的联合信息与本地的高精度地图进行比对,即可得到当前车辆在该高精地图中的绝对位置,从而为后续的感知、决策和执行模块提供数据基础。
位置信息是自动驾驶实现的关键要素。以位置信息的获取方式为分类依据,目前自动驾驶主要的技术路径分为三种方案:一是以特斯拉为代表的纯视觉方案;二是多数车企/科技公司采用的多传感器融合方案;三是车路协同方案。上述技术路径在硬件(传感器)方面,主要采用GNSS、IMU、车载摄像头与车载雷达。从技术对比来看,各类传感器都均有自身局限,但GNSS+IMU组合导航能够实现优势互补,其重要性近年来越来越受到重视,已在多款乘用车、商用车中得到应用。展望未来,除纯视觉方案的技术路径外,卫惯组合导航有望成为自动驾驶车辆的标配硬件。
位置信息具体有两层含义:一是得到车与周围环境之间的相对位置,即相对定位;二是得到车的精确经纬度,即绝对定位。
位置信息获取的主要技术方案包括:
①基于卫星信号的定位:以全球导航卫星系统GNSS为主,结合RTK(实时差分定位)实现厘米级定位;
②惯性定位:依靠惯性传感器获得加速度和角速度信息,通过推算获得当前位置和方位的定位技术;
③环境特征匹配:利用车载摄像头、激光雷达等传感器,感知周边环境(相对定位),用观测到的特征和数据库里的语义地图或特征地图进行匹配,得到车辆的位置和姿态(绝对定位)。
各类导航技术的对比见表1.9。
表1.9 各类导航技术的对比

从表1.9中可以看出,卫惯组合系统的优势主要表现在IMU对GNSS定位结果的修正和信号丢失情况下的定位保证。通过组合系统,卫导和惯导能够实现优势互补,在定位精度和稳定性上都有较好保证。
GNSS+RTK方案是最常用、最成熟的高精度定位方法。IMU全称为inertial measurement unit,即惯性测量单元,是自动驾驶定位系统的最后一道防线。IMU对相对和绝对位置的推演没有任何外部依赖,是一个类似于黑匣子的完备系统。
IMU对GNSS的修正示意图如图1.14所示。
由于IMU提供的是一个相对的定位信息,它的作用是测量相对于起点物体所运动的路线,所以它并不能提供你所在的具体位置的信息。因此,IMU和GNSS一起使用时,当在某些卫星信号微弱的地方,IMU可以让汽车继续获得绝对位置的信息,不至于“迷路”。
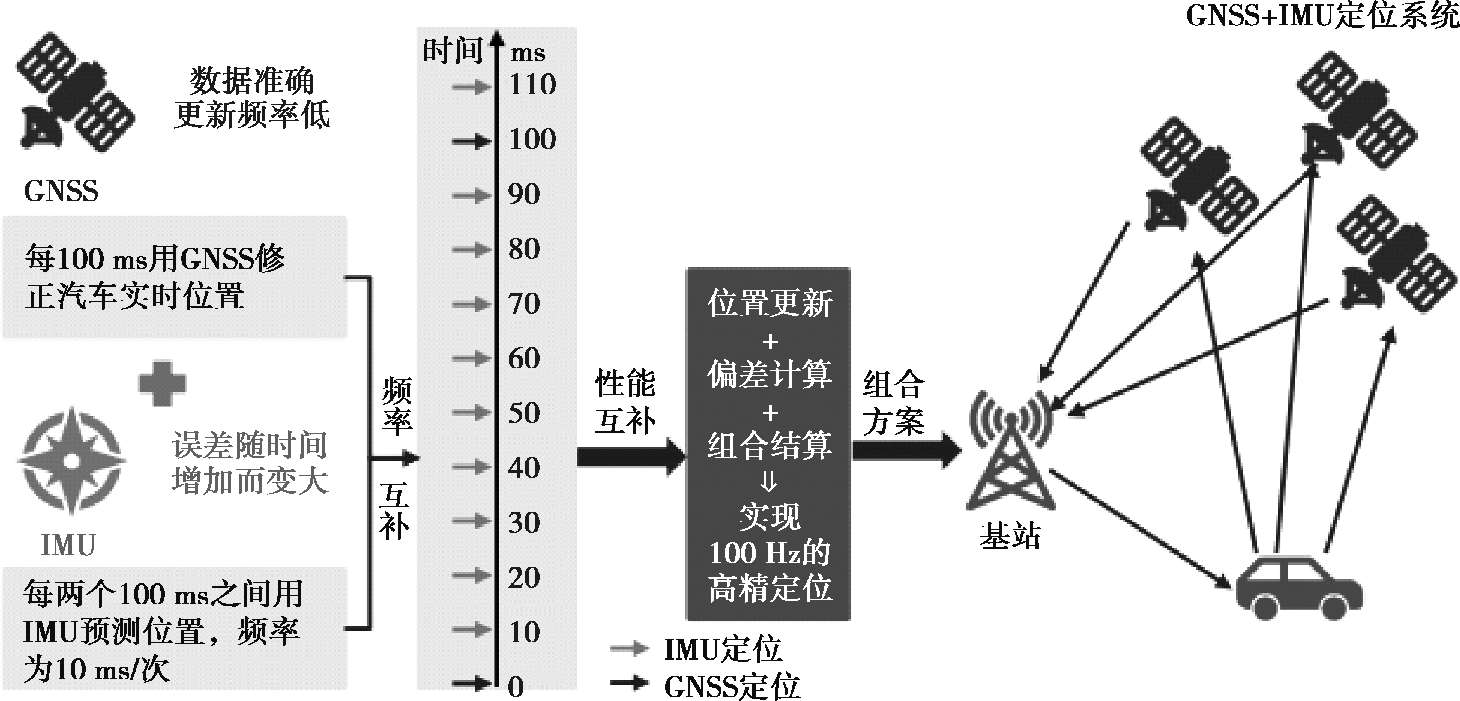
图1.14 IMU对GNSS的修正示意图