
下载掌阅APP,畅读海量书库
立即打开



实话说,我从没想过会写一本控制课程的入门书籍。在我的教学生涯中,我曾用Ogata
[1]
、Kuo
[2]
、Franklin等
[3]
以及Phillips和Parr
[4]
的教科书授课,并从Qiu和Zhou
[5]
以及Goodwin
[6]
的书中节选了讲义。在这些教材中,我获得了很多好的想法
 。但是,这些书中的建模部分只是简单陈述了模型,并没有使用物理学原理进行推导,我有些失望。为了解决这个问题,我编写了刚体动力学(第5章)、直流电动机(第6章)以及倒立摆和磁悬浮系统(第13章)的讲义。但我意识到书中翔实的建模过程对很多人来说是“缺点”,而不是“特点”。因为学生认为这很难并且减少了他们学习控制部分的时间。然而,正如我的一位同事所说,当学生了解了动态模型的来源以及获得这些模型中使用的线性、近似或简化的方法时,他们就会提升自己的理解能力。
。但是,这些书中的建模部分只是简单陈述了模型,并没有使用物理学原理进行推导,我有些失望。为了解决这个问题,我编写了刚体动力学(第5章)、直流电动机(第6章)以及倒立摆和磁悬浮系统(第13章)的讲义。但我意识到书中翔实的建模过程对很多人来说是“缺点”,而不是“特点”。因为学生认为这很难并且减少了他们学习控制部分的时间。然而,正如我的一位同事所说,当学生了解了动态模型的来源以及获得这些模型中使用的线性、近似或简化的方法时,他们就会提升自己的理解能力。
在职业生涯的早期,我觉得讲授控制系统入门课程的时候,似乎应该更多地阐述其中的技术,例如框图化简、根轨迹的绘制、伯德图和奈奎斯特图的绘制、做劳斯-赫尔维茨检验等。但是,我后来认为这门课程应该是让一些物理系统实现你设计的功能,例如让一个末端夹持重物的机器臂旋转30°,或者确保磁性轴承在承受各种载荷的情况下保持气隙,保持摆杆笔直向上等。我记得有位同事在他的一次授课中发表了自己的评论,他阐述了标准的单位反馈控制器框图,如图1所示,并告诉全体学生,控制器 G c ( s )的设计应确保 C ( s )≈ R ( s )。然后一个学生问:为什么不直接去掉这些方框,直接设置 C ( s )= R ( s )。似乎在控制系统入门课程的教学中,我们频繁而简单地化简框图,以至于学生很容易迷失在抽象概念中,无法理解它们所代表的真实含义。
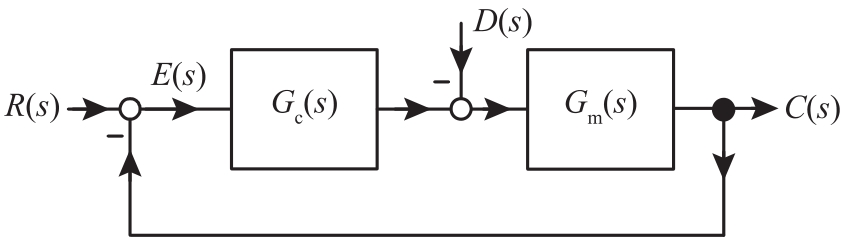
图1 标准框图形式的控制系统
图2是为了帮助学生理解框图代表的含义。
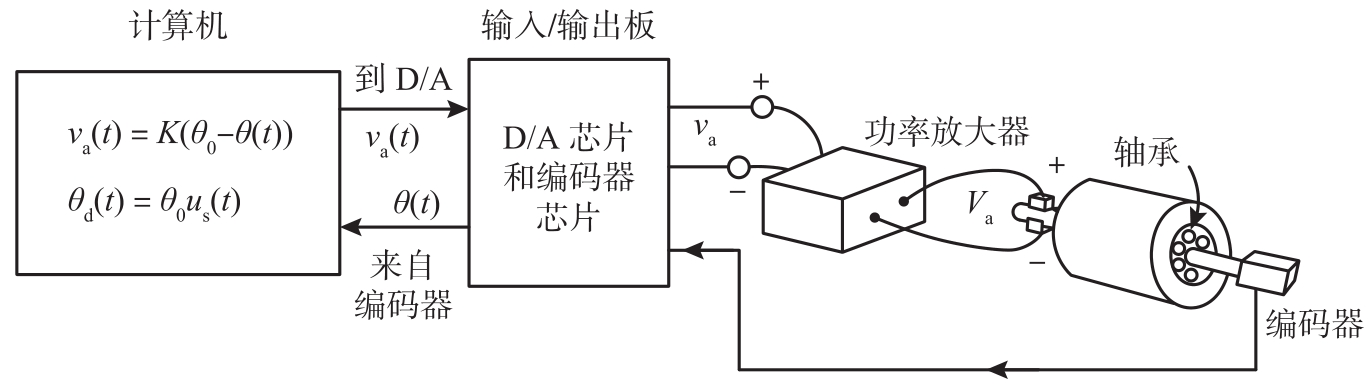
图2 直流电动机的位置控制
在授课时,我们需要花时间对一些模型进行详细推导,这有助于学生理解并记住传递函数模型表示的意义。在干扰的建模中也出现了类似的问题,当干扰在框图模型中出现时,通常将其作为物理系统的输入。例如,一个电动机上可能有负载转矩,但在框图中,这个干扰 D ( s )是作为电动机输入的电压来建模的。我解释了如何将该负载转矩建模为等效电压干扰,电压干扰对转子位置/速度的影响与实际负载转矩相同。在将微分方程模型转换为框图模型的标准步骤中,这种理解似乎没有出现。当然,一些好的物理实验也能帮助学生清晰地理解这些想法。
第1章对飞机、四旋翼无人机、倒立摆和磁悬浮钢球的运行进行了定性描述,用来提出对建模和控制的需求。
第2章是关于拉普拉斯变换理论的标准介绍,强调将部分分式法作为将时域与拉普拉斯域(复频域)关联的一种方式。
第3章讨论微分方程,通过特别关注终值定理(Final Value Theorem, FVT)来引入稳定性。这很重要,因为它通过FVT lim s →0 sE ( s )=0显示误差 e ( t )→0来影响渐近跟踪或阶跃输入的干扰抑制。本章还解释了如何使用劳斯-赫尔维茨检验来检查微分方程的稳定性。
第4~6章讨论建模。第4章介绍了质量-弹簧-阻尼系统,并使用它们来引入Simulink仿真。第5章介绍了应用于齿轮和滚动运动的刚体动力学。关于直流电动机的第6章使用物理学的第一原理来推导方程,用于直流电动机建模并解释光学编码器和转速表的工作原理。
第7章讨论框图,需要强调的是,框图只是物理系统的各种(拉普拉斯变换)变量之间关系的图形表示。本章中框图重新排列和化简的方法,为本书中所有框图化简提供了一种简单明了的方法。
第8章关于系统响应的内容也采用了相当标准的讲述方式,这章的目标是建立 s 域和时域之间的联系。
第9章使用内部模型原理对PID控制进行解释。解释了为什么控制器必须有一个积分器来抑制恒定干扰,其中P和D部分(通常)需要用来使闭环系统稳定。重要的是让学生理解为什么PID控制被应用在如此多的应用中。
在学习第1~9章之后,在学期结束之前,我们通常还会学习根轨迹法、伯德图和奈奎斯特图。学生似乎很好地理解了根轨迹,但这种方法在设计控制器时似乎没有那么有用。也就是说,我们必须为控制器提出某种形式(似乎无中生有),然后改变单个增益,看看闭环极点是否可以移动到能产生良好响应的位置。一个典型的例子是有一个形式为
 的开环模型,提出一个
的开环模型,提出一个
 形式的控制器,然后做一个根轨迹来选择增益
K
,这样闭环系统的两个“主导”极点会产生期望的响应。然而,使用这个控制器,实际上可以任意配置三个闭环极点。根轨迹法之后通常接着讲授伯德图、奈奎斯特图和奈奎斯特稳定性。根据我的经验,奈奎斯特的理论对学生来说总是比较难掌握的。在努力理解奈奎斯特理论后,使用伯德图(超前、滞后、超前-滞后等)来设计控制器以获得期望的增益和相位裕度仍然是一种试错方法。此外,增益和相位裕度与系统性能(调节时间、超调量等)之间没有直接的联系。这使得学生无法直接设计控制器。
形式的控制器,然后做一个根轨迹来选择增益
K
,这样闭环系统的两个“主导”极点会产生期望的响应。然而,使用这个控制器,实际上可以任意配置三个闭环极点。根轨迹法之后通常接着讲授伯德图、奈奎斯特图和奈奎斯特稳定性。根据我的经验,奈奎斯特的理论对学生来说总是比较难掌握的。在努力理解奈奎斯特理论后,使用伯德图(超前、滞后、超前-滞后等)来设计控制器以获得期望的增益和相位裕度仍然是一种试错方法。此外,增益和相位裕度与系统性能(调节时间、超调量等)之间没有直接的联系。这使得学生无法直接设计控制器。
在PID控制之后,我不是直接进行根轨迹法、伯德图和奈奎斯特图的讲授,而是首先学习第10章,介绍输出极点配置和二自由度(2DOF)控制器。从传递函数模型开始,这些方法提供了一种直接且系统的方法来设计输出反馈控制器,以实现跟踪和干扰抑制目标,同时通常还能够消除阶跃响应中的超调。
在我增加第10章(极点配置和二自由度控制器)之前,第一学期的课程结束于伯德图和奈奎斯特图(第11章)与根轨迹法(第12章)。在学习完第10章之后,通常一个学期内没有足够的时间来同时学习第11章和第12章。因此,我在第二学期开头讲授第11章。奈奎斯特理论是理解控制系统鲁棒性和灵敏度的基础。使用第10章中设计的单位输出反馈倒立摆控制器,奈奎斯特分析表明由此产生的稳定裕度在实际工作时对该系统来说太小。这里的重点是要表明,控制不仅仅是使闭环系统稳定。第17章阐述了这些观点。
第12章是关于根轨迹法的标准介绍。最后通过例题设计一个陷波滤波器,该滤波器抵消了靠近j ω 轴的稳定开环极点,并且对这些极点位置的小扰动具有鲁棒性。
第13章利用物理学第一原理推导了倒立摆、磁悬浮钢球和轨道上的小车的微分方程模型。介绍了如何获得倒立摆和磁悬浮钢球的线性模型,以及如何使用第9章和第10章的方法对它们进行控制。
第14章与状态变量有关,给出了第15章状态反馈理论所需的基本线性(矩阵)代数的背景知识。
第15章讨论状态反馈,首先详细推导了轨道系统中小车的状态轨迹跟踪控制器。这遵循线性状态空间模型的状态反馈的一般方法,包括开发状态空间极点配置算法。此外,基于内部模型原理,详细介绍了伺服系统(直流电动机)的干扰抑制状态空间控制器。这里的一个重要目标是展示通过轨迹生成、极点配置和状态估计实现的轨迹跟踪(第16章),为在状态空间中设计反馈控制器提供了一个系统程序。这将与在第10章中给出的拉普拉斯域极点配置的系统程序进行比较。
第16章讨论状态和参数估计。当没有完整的状态测量时,状态估计(状态观测器)被表示为“要做什么”。这一章提出了一种观测器,该观测器使用光学编码器的输出提供电动机速度的平滑估计,并与编码器输出得到的噪声估计进行比较。通过对直流电动机模型参数的详细估计,解释如何使用最小二乘法进行参数估计。
第17章讨论鲁棒性和灵敏度。利用奈奎斯特理论和伯德灵敏度积分,使读者了解开环模型具有右半平面极点的控制系统的基本问题。具体考虑四种不同的倒立摆稳定控制器的鲁棒性和灵敏度:1)小车位置的输出反馈;2)小车位置和摆杆角度的线性组合的输出反馈;3)全状态反馈;4)小车位置输出反馈后的状态估计和状态反馈。
教学辅助配套材料
本书每章均配有一套教学PPT,同时针对每章的习题都有习题解答手册。此外,还提供一套完整的MATLAB/Simulink文件,配套应用于书中相关的示例和习题。这些教辅材料都可以从Wiley提供的配套网站www.wiley.com/go/chiasson/anintroductiontosystemmodelingandcontrol上找到。
预备知识及章节相关性
本书的基础是初等微分方程、拉普拉斯变换和(基于微积分的)大学一年级/二年级物理课程。第14~16章假设读者了解矩阵代数(矩阵乘法、行列式、逆运算等)。
通常第一学期的课程包含以下内容:
● 第1章:所有章节
● 第2章:所有章节
● 第3章:除3.5.1节和3.5.2节的所有章节
● 第4章:所有章节
● 第5章:5.1~5.3节
● 第6章:6.1~6.4节
● 第7章:所有章节
● 第8章:所有章节
● 第9章:9.1~9.4节
● 第10章:10.1~10.3节
第二学期可能学习的内容如下:
● 第11章:所有章节
● 第12章:所有章节
● 第13章:13.1节、13.2节,以及13.3节或13.4节
● 第14章:14.1~14.4节
● 第15章:15.1~15.8节
● 第16章:16.1节
● 第17章:17.1~17.3节
各章的逻辑相关性如图3所示。
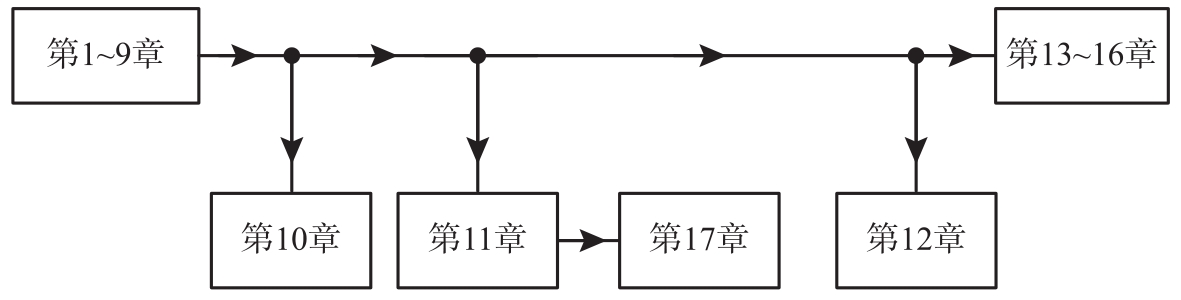
图3 各章的逻辑相关性
致谢
我想借此机会感谢Uri Rogers博士为改进初稿提出了一些宝贵的建议,并指出了早期版本中的错误。我还要感谢Marc Bodson博士富有帮助的评论,并向我介绍了电机工作中的参数识别。在我职业生涯的早期,Edward Kamen教授非常支持我讲授控制入门课程,对此我非常感激。感谢已故的Bruce Francis教授的评论和对本书早期版本的批注。我还要感谢Aykut Satici博士在这项工作的最后阶段提供了至关重要的帮助。感谢匿名审稿人对稿件提供了许多建设性的意见。感谢约翰·威立出版公司(John Wiley & Sons)允许我重复使用我的 Modeling and High-Performance Control of Electric Machines 一书第1章中的材料 [7] 。Wiley出版社的编辑Brett Kurzman以及他的制作团队成员Sarah Lemore和Devi Ignasi将我的文稿变成了一本书,非常感谢他们。最后,我要感谢许多我教过的学生,他们忍受了这本书的各种早期版本。
我非常欢迎所有的评论、批评和更正,这些意见可以发送至邮箱chiasson@ieee.org。
约翰·基亚松