
下载掌阅APP,畅读海量书库
立即打开



继电器是根据一定的信号(如电流、电压、时间和速度等物理量)的变化来接通或分断小电流电路和电器的自动控制电器。
继电器实质上是一种传递信号的电器,它根据特定形式的输入信号而动作,从而达到控制目的。它一般不用来直接控制主电路,而是通过接触器或其他电器来对主电路进行控制,因此同接触器相比较,继电器的触头通常接在控制电路中,触头断流容量较小,一般不需要灭弧装置,但对继电器动作的准确性则要求较高。
继电器一般由 3 个基本部分组成:检测机构、中间机构和执行机构。检测机构的作用是接受外界输入信号并将信号传递给中间机构;中间机构对信号的变化进行判断、物理量转换、放大等;当输入信号变化到一定值时,执行机构(一般是触头)动作,从而使其所控制的电路状态发生变化,接通或断开某部分电路,达到控制或保护的目的。
继电器种类很多,按输入信号可分为:电压继电器、电流继电器、功率继电器、速度继电器、压力继电器、温度继电器等;按工作原理可分为:电磁式继电器、感应式继电器、电动式继电器、电子式继电器、热继电器等;按用途可分为控制与保护继电器;按输出形式可分为有触点和无触点继电器。
电磁式继电器是依据电压、电流等电量,利用电磁原理使衔铁闭合动作,进而带动触头动作,使控制电路接通或断开,实现动作状态的改变。
电磁式继电器的结构和工作原理与电磁式接触器相似,也是由电磁机构、触点系统和释放弹簧等部分组成。电磁式继电器的典型结构如图1.28 所示。
1)电磁机构
直流继电器的电磁机构形式为U形拍合式。铁芯和衔铁均由电工软铁制成。为了增加闭合后的气隙,在衔铁的内侧面上装有非磁性垫片,铁芯铸在铝基座上。交流继电器的电磁机构形式有U形拍合式、E形直动式、空心或装甲螺管式等结构形式。U形拍合式和E形直动式的铁芯及衔铁均由硅钢片叠成,且在铁芯柱端上面装有分磁环。
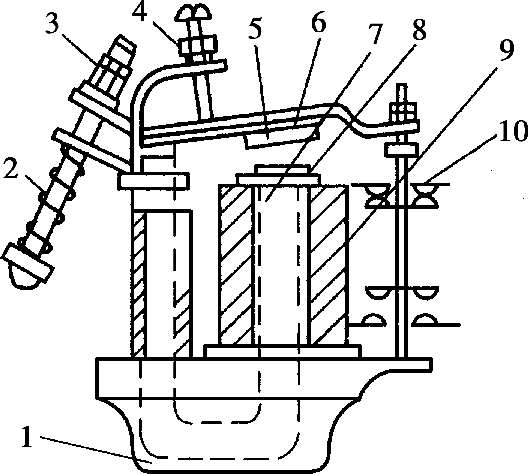
图1.28 电磁式继电器的典型结构
1—底座;2—反力弹簧;3,4—调节螺钉;5—非磁性垫片;6—衔铁;7—铁芯;8—极靴;9—电磁线圈;10—触点系统
2)触点系统
交、直流继电器的触点由于均接在控制电路上,且电流小,故不装设灭弧装置。其触点一般都为桥式触点,有常开和常闭两种形式。
另外,为了实现继电器动作参数的改变,继电器一般还具有改变释放弹簧松紧及改变衔铁打开气隙大小的调节装置,例如调节螺母。
继电器的主要特性是输入-输出特性,又称为继电器特性,当改变继电器输入量的大小时,对于输出量的触头只有“通”与“断”两个状态,如图1.29 所示。当继电器输入量 x 由零增至 x 2 以前,继电器输出量 y 为零。当继电器输入量 x 增至 x 2 时,继电器吸合,输出量为 y 1 ,如 x 再增大, y 1 值保持不变。当 x 减小到 x 1 时,继电器释放,输出量由 y 1 降到零, x 再减小, y 值均为零。 x 2 称为继电器吸合值,欲使继电器吸合,输入量必须等于或大于 x 2 ; x 1 为继电器的释放值,欲使继电器释放,输入量必须等于或小于 x 1 。
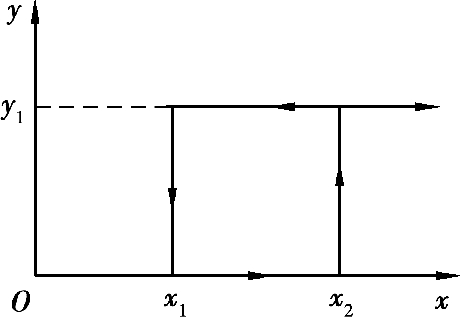
图1.29 继电器特性曲线
额定参数是指继电器的线圈和触头在正常工作时的电压或电流允许值。
动作参数是指衔铁产生动作时线圈的电压或电流值。对于电压继电器有吸合电压 U 2 和释放电压 U 1 ;对于电流继电器有吸合电流 I 2 和释放电流 I 1 。
整定值是指根据控制电路的要求,对继电器的继电器参数进行调整的数值。
返回系数是指继电器的释放值与吸合值之比,以 K = x 1 /x 2 表示。对于电压继电器, x 1 为释放电压 U 1 , x 2 为吸合电压 U 2 ;对于电流继电器, x 1 为释放电流 I 1 , x 2 为吸合电流 I 2 。
不同的场合要求不同的 K 值,可以通过调节释放弹簧的松紧程度(拧紧时 K 增大,放松时 K 减小)或调整铁芯与衔铁之间非磁性垫片的厚度(增厚时 K 增大,减薄时 K 减小)来达到所要求的值。
吸合时间是指线圈接受电信号到衔铁完全吸合所需的时间;释放时间是指线圈失电到衔铁完全释放所需的时间。一般继电器的吸合时间与释放时间为 0.05~0.2 s,它的大小影响继电器的操作频率。
继电器线圈运行时消耗的功率,与其线圈匝数的二次方成正比。继电器的灵敏度越高,要求继电器的消耗功率越小。
触点动作与否与通过线圈的电流大小有关的继电器叫做电流继电器,主要用于电动机、发电机或其他负载的过载及短路保护、直流电动机磁场控制或失磁保护等。电流继电器的线圈串在被测量电路中,其线圈匝数少、导线粗、阻抗小。电流继电器除用于电流型保护的场合外,还经常用于按电流原则控制的场合。电流继电器有过电流和欠电流继电器两种。
过电流继电器在电路正常工作时,衔铁是释放的;一旦电路发生过载或短路故障时,衔铁才吸合,带动相应的触点动作,即常开触点闭合,常闭触点断开。
欠电流继电器在电路正常工作时,衔铁是吸合的,其常开触点闭合,常闭触点断开;一旦线圈中的电流降至额定电流的 10%~20%时,衔铁释放,发出信号,从而改变电路的状态。
触点的动作与加在线圈上的电压大小有关的继电器称为电压继电器,它用于电力拖动系统的电压保护和控制。电压继电器反映的是电压信号,它的线圈并联在被测电路的两端,所以匝数多、导线细、阻抗大。电压继电器按动作电压值的不同,分为过电压和欠电压继电器两种。
过电压继电器在电路电压正常时,衔铁释放,一旦电路电压升高至额定电压的 110%~115%时,衔铁吸合,带动相应的触点动作;欠电压继电器在电路电压正常时,衔铁吸合,一旦电路电压降至额定电压的 5%~25%时,衔铁释放,输出信号。
中间继电器实质也是一种电压继电器。只是它的触点对数较多,容量较大,动作灵敏。主要起扩展控制范围或传递信号的中间转换作用。
电磁式继电器型号的含义和电气符号如图1.30 所示。
在自动控制系统中,有时需要继电器得到信号后不立即动作,而是要顺延一段时间后再动作并输出控制信号,以达到按时间顺序进行控制的目的。时间继电器就可以满足这种要求。
时间继电器按工作原理不同可分为直流电磁式、空气阻尼式(气囊式)、晶体管式、电动式等几种;按延时方式不同可分为通电延时型和断电延时型。
空气阻尼式时间继电器利用空气通过小孔时产生阻尼的原理获得延时。其结构由电磁系统、延时结构和触头 3 部分组成,如图1.31 所示。电磁机构为双E直动式,触头系统为微动开关,延时机构采用气囊式阻尼器。
空气阻尼式时间继电器既有通电延时型,也有断电延时型。只要改变电磁机构的安装方向,便可实现不同的延时方式:当衔铁位于铁芯和延时机构之间时为通电延时,如图1.31(a)所示;当铁芯位于衔铁和延时机构之间时为断电延时,如图1.31(b)所示。
图1.31(a)为通电延时型时间继电器,当线圈 1 通电后,铁芯 2 将衔铁 3 吸合,活塞杆 6 在塔形弹簧的作用下带动活塞 12 及橡皮膜 10 向上移动,由于橡皮膜下方气室空气稀薄,形成负压,因此活塞杆 6 不能上移。当空气由气孔 14 进入时,活塞杆 6 才逐渐上移。移到最上端时,杠杆 7 才使微动开关动作。延时时间即为自电磁铁吸引线圈通电时刻起到微动开关动作时为止的这段时间。通过调节螺杆 13 调节进气口的大小,就可以调节延时时间。
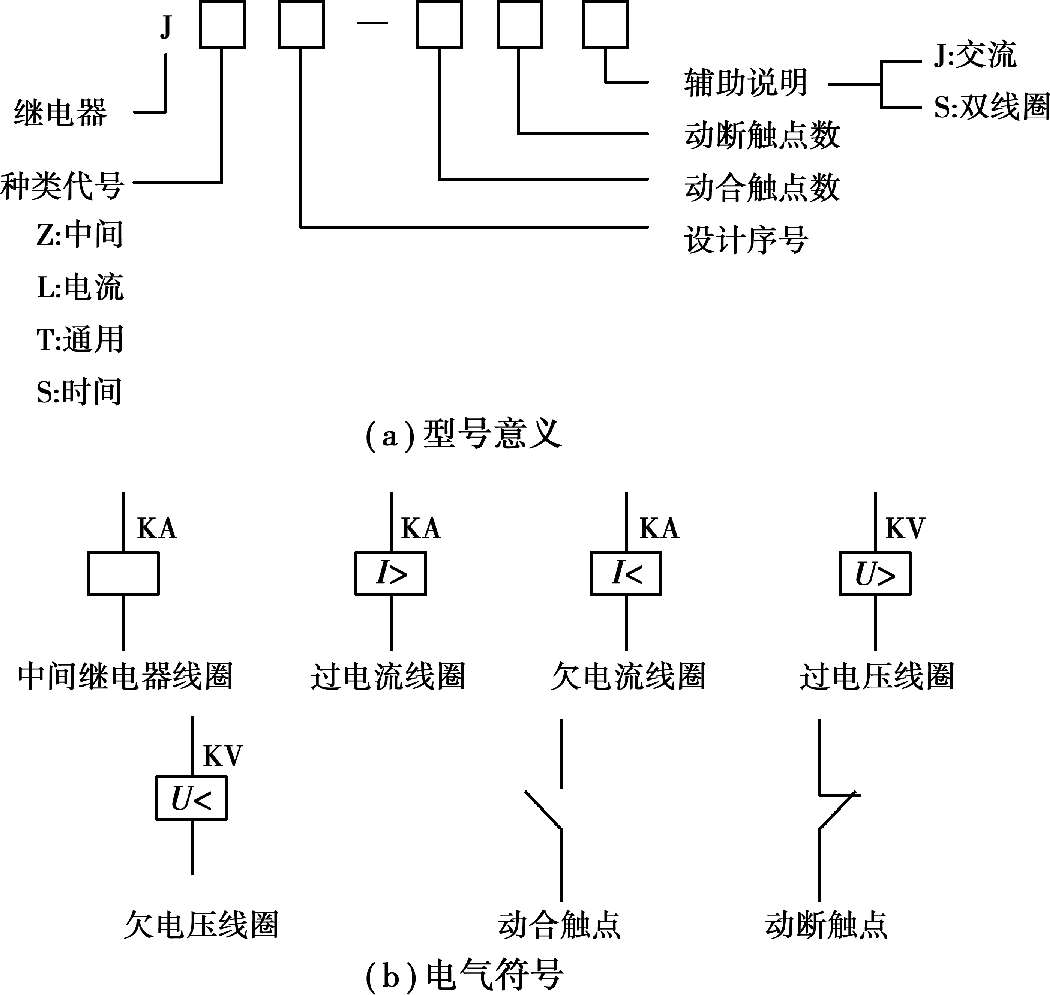
图1.30 电磁式继电器型号的含义和电气符号
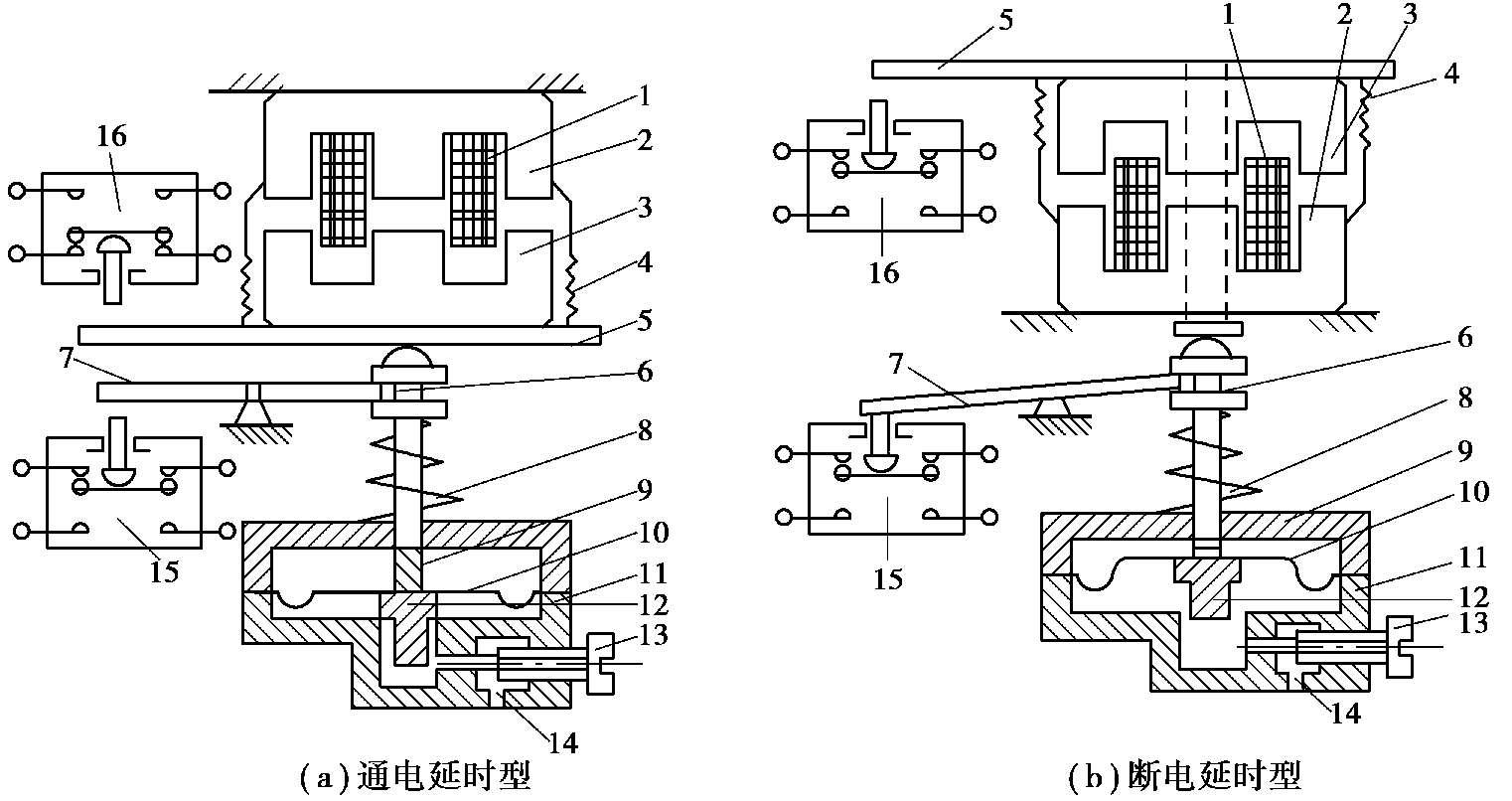
图1.31 空气阻尼式时间继电器的动作原理
1—线圈;2—铁芯;3—衔铁;4—恢复弹簧;5—推板;6—活塞杆;7—杠杆;8—塔形弹簧;9—弱弹簧;10—橡皮膜;11—气室;12—活塞;13—调节螺钉;14—进气孔;15,16—微动开关
当线圈 1 断电时,衔铁 3 在复位弹簧 4 的作用下将活塞 12 推向最下端。因活塞被往下推时,橡皮膜下方气孔内的空气都通过橡皮膜 10、弱弹簧 9 和活塞 12 肩部所形成的单向阀,经上气室缝隙顺利排掉,因此延时与不延时的微动开关 15 与 16 都迅速复位。
空气阻尼式时间继电器的优点是结构简单、寿命长、价格低廉。缺点是准确度低、延时误差大,在延时精度要求高的场合不宜采用。
晶体管式时间继电器常用的有阻容式时间继电器,它利用RC电路中电容电压不能跃变,只能按指数规律逐渐变化的原理——电阻尼特性获得延时的。所以,只要改变充电回路的时间常数即可改变延时时间。由于调节电容比调节电阻困难,因此多用调节电阻的方式来改变延时时间。其原理图如图1.32 所示。
晶体管式时间继电器具有延时范围广、体积小、精度高、使用方便及寿命长等优点。
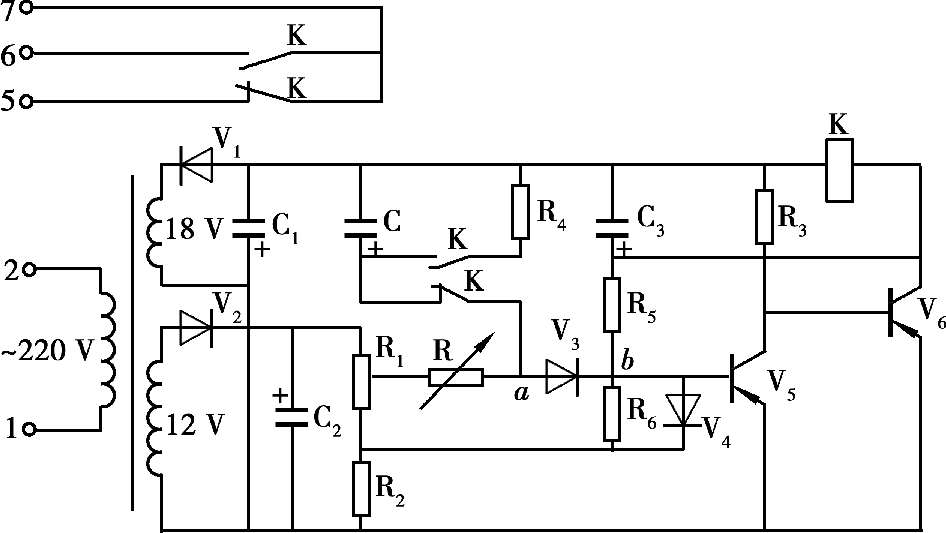
图1.32 晶体管式时间继电器原理图
时间继电器的图形符号及文字符号如图1.33 所示。
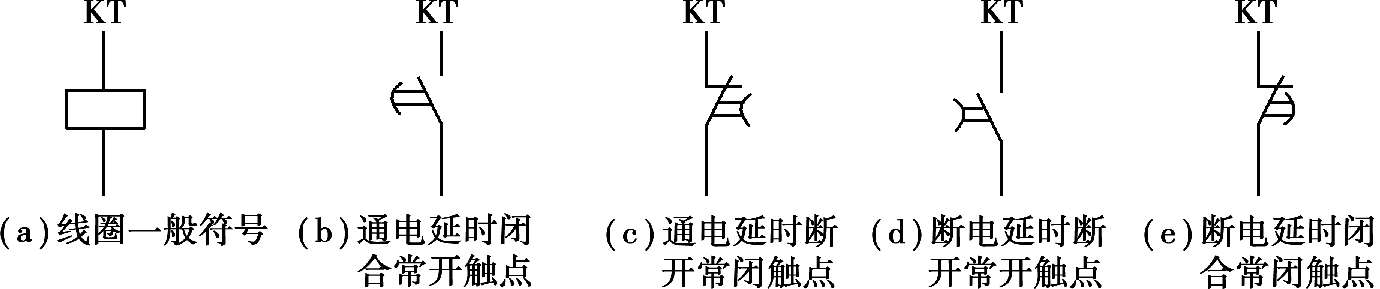
图1.33 时间继电器的图形符号及文字符号
对于通电延时时间继电器,当线圈得电时,其延时动合触点要延时一段时间才闭合,延时动断触点要延时一段时间才断开;当线圈失电时,其延时常开触点迅速断开,延时常闭触点迅速闭合。
对于断电延时时间继电器,当线圈得电时,其延时动合触点迅速闭合,延时动断触点迅速断开;当线圈失电时,其延时常开触点要延时一段时间再断开,延时常闭触点要延时一段时间再闭合。
热继电器是电流通过发热元件产生热量,使检测元件受热弯曲而推动机构动作的一种继电器。由于热继电器中发热元件的发热惯性,在电路中不能作瞬时过载保护和短路保护。它主要用于电动机的过载保护、断相保护和三相电流不平衡运行的保护。
热继电器的形式有多种,其中以双金属片最多。双金属片式热继电器主要由热元件、双金属片和触头三部分组成,如图1.34 所示。双金属片是热继电器的感测元件,由两种膨胀系数不同的金属片碾压而成。当串联在电动机定子绕组中的热元件有电流流过时,热元件产生的热量使双金属片伸长,由于膨胀系数不同,致使双金属片发生弯曲。电动机正常运行时,双金属片的弯曲程度不足以使热继电器动作。当电动机过载时,流过热元件的电流增大,加上时间效应,从而使双金属片的弯曲程度加大,最终使双金属片推动导板使热继电器的触头动作,切断电动机的控制电路。
热继电器由于热惯性,当电路短路时不能立即动作使电路断开,因此不能用作短路保护。同理,在电动机启动或短时过载时,热继电器也不会马上动作,从而避免电动机不必要的停车。
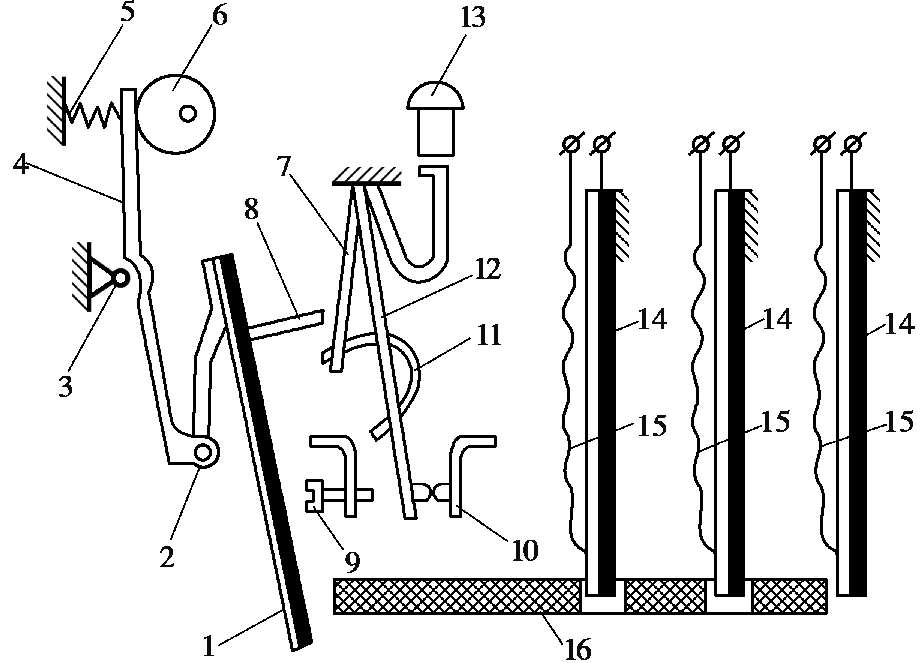
图1.34 热继电器的工作原理示意图
1—补偿双金属片;2—销子;3—支撑;4—杠杆;5—弹簧;6—凸轮;7,12—片簧;8—推杆;9—调节螺钉;10—触点;11—弓簧;13—复位按钮;15—发热元件;16—导板
热继电器按热元件数分为两相和三相结构。三相结构中又分为带断相保护和不带断相保护装置两种。
目前国内生产的热继电器品种很多,常用的有JR20、JRS1、JRS2、JRS5、JRl6B和T系列等。其中,JRS1 为引进法国TE公司的LR1-D系列,JRS2 为引进德国西门子公司的 3UA系列,JRS5 为引进日本三菱公司的TH-K系列,T系列为引进德国ABB公司的产品。
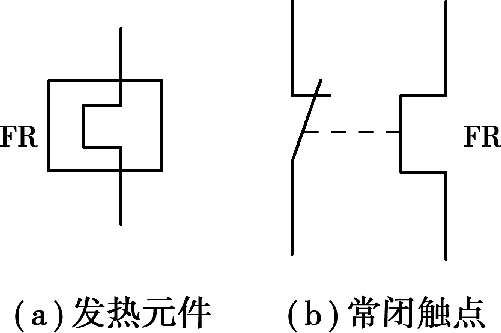
图1.35 热继电器的图形符号和文字符号
JR20 系列热继电器采用立体布置式结构,且系列动作机构通用。除具有过载保护、断相保护、温度补偿以及手动和自动复位功能外,还具有动作脱扣灵活、动作脱扣指示以及断开检验按钮等功能装置。
热继电器的图形符号和文字符号如图1.35 所示。
选用热继电器时,必须了解被保护对象的工作环境、启动情况、负载性质、工作制及电动机允许的过载能力。原则是热继电器的安秒特性位于电动机过载特性之下,并尽可能接近。
1)热继电器的类型选择
若用热继电器作电动机缺相保护,应考虑电动机的接法。对于星形接法的电动机,当某相断线时,其余未断相绕组的电流与流过热继电器电流的增加比例相同。一般的三相式热继电器,只要整定电流调节合理,是可以对星形接法的电动机实现断相保护的;对于三角形接法的电动机,某相断线时,流过未断相绕组的电流与流过热继电器的电流增加比例则不同。也就是说,流过热继电器的电流不能反映断相后绕组的过载电流。因此,一般的热继电器,即使是三相式,也不能为三角形接法的三相异步电动机的断相运行提供充分保护。此时,应选用三相带断相保护的热继电器。带断相保护的热继电器的型号后面有D、T或 3UA字样。
2)热元件的额定电流选择
应按照被保护电动机额定电流的 1.1~1.15 倍选取热元件的额定电流。
3)热元件的整定电流选择
一般将热继电器的整定电流调整到等于电动机的额定电流;对过载能力差的电动机,可将热元件的整定值调整到电动机额定电流的 0.6~0.8 倍;对启动时间较长、拖动冲击性负载或不允许停车的电动机,热元件的整定电流应调整到电动机额定电流的 1.1~1.15 倍。
速度继电器是利用转轴的一定转速来切换电路的自动电器,主要用作鼠笼式异步电动机的反接制动控制中,故称为反接制动继电器。
速度继电器如图1.36 所示,主要由转子、定子和触头三部分组成。
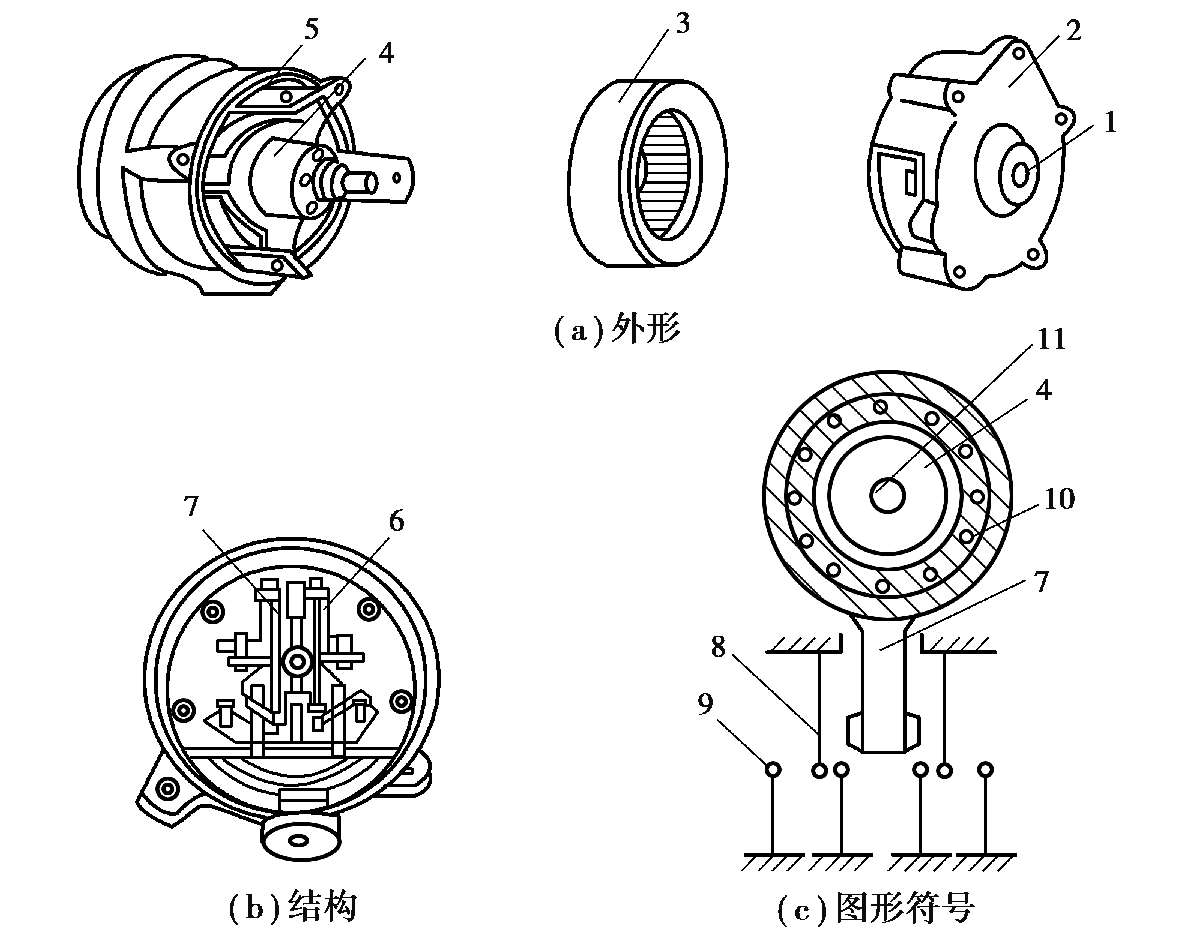
图1.36 速度继电器
1—连接头;2—端盖;3—定子;4—转子;5—可动支架;6—触点;7—胶木摆杆;8—簧片;9—静触头;10—绕组;11—轴
转子是一个圆柱形永久磁铁;定子是一个笼型空心圆环,由硅钢片叠成,并装有笼型的绕组。速度继电器与电动机同轴相连,当电动机旋转时,速度继电器的转子随之转动,在空间产生旋转磁场,切割定子绕组,在定子绕组中感应出电流。此电流又在旋转的转子磁场作用下产生转矩,使定子随转子转动方向而旋转,和定子装在一起的摆锤推动动触头动作,使常开触点闭合、常闭触点断开。当电动机速度低于某一值时,动作产生的转矩减小,动触头复位。
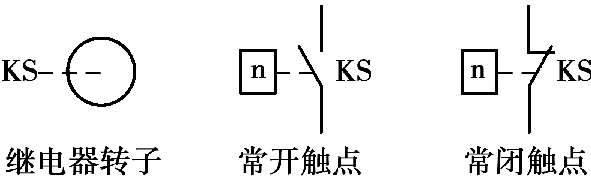
图1.37 速度继电器的电气符号
常用的速度继电器有YJ1 和JFZ0-2 型。
速度继电器的电气符号如图1.37 所示。