
下载掌阅APP,畅读海量书库
立即打开



20世纪60年代,Kalman等人提出了一种经典的滤波方法,能够解决时域线性系统的滤波问题。这就是卡尔曼滤波方法,它能克服维纳滤波的局限性。卡尔曼滤波方法一经提出就得到了广泛应用,它可以用于估计信号过去的状态、当前的状态及将来的状态。最初的卡尔曼滤波方法被称为基本滤波方法,适用于线性高斯系统,能够解决离散随机动态系统的状态估计滤波问题。在实际应用系统中,可以将系统的运行过程视为一个状态转换过程。
2.1.1 线性系统介绍
考虑线性高斯系统,其状态方程和观测方程如下:
x ( k +1)= A ( k +1, k ) x ( k )+ w ( k )
(2.1.1)
y ( k +1)= H ( k +1) x ( k +1)+ v ( k +1)
(2.1.2)
其中, x ( k )∈ R n ×1 是系统的状态向量, A ( k +1, k )∈ R n × n 是系统的状态转移矩阵; y ( k +1)∈ R m×1 是状态 x ( k +1) 的观测向量, H ( k +1)∈ R m × n 是相应的观测矩阵; w ( k ) 和 v ( k +1) 是零均值的高斯白噪声过程,且满足如下条件:
(1) E { w ( k )}=0。
(2) E { w ( k ) w (j) T }= Q ( k +1, k ) δ kj 。
(3) E { v ( k +1)}=0。
(4) E { v ( k +1) v T ( j +1)}= R ( k +1) δ kj 。
(5) E { w ( k ) v T ( j )}=0。
其中
系统状态的初始值为一随机向量,满足如下关系:
(2.1.3)
基于初始条件的统计特征及观测信息,获得状态 x ( k ) 的估计值和相应的协方差矩阵:

下面给出卡尔曼滤波器的推导过程,即

(2.1.4)
2.1.2 基于正交定理的线性卡尔曼滤波器设计
(1)基于状态模型即式(2.1.1),计算状态变量 x ( k +1) 的一步传播预测值估计值:

(2.1.5)
预测估计误差:

(2.1.6)
预测估计误差协方差矩阵:
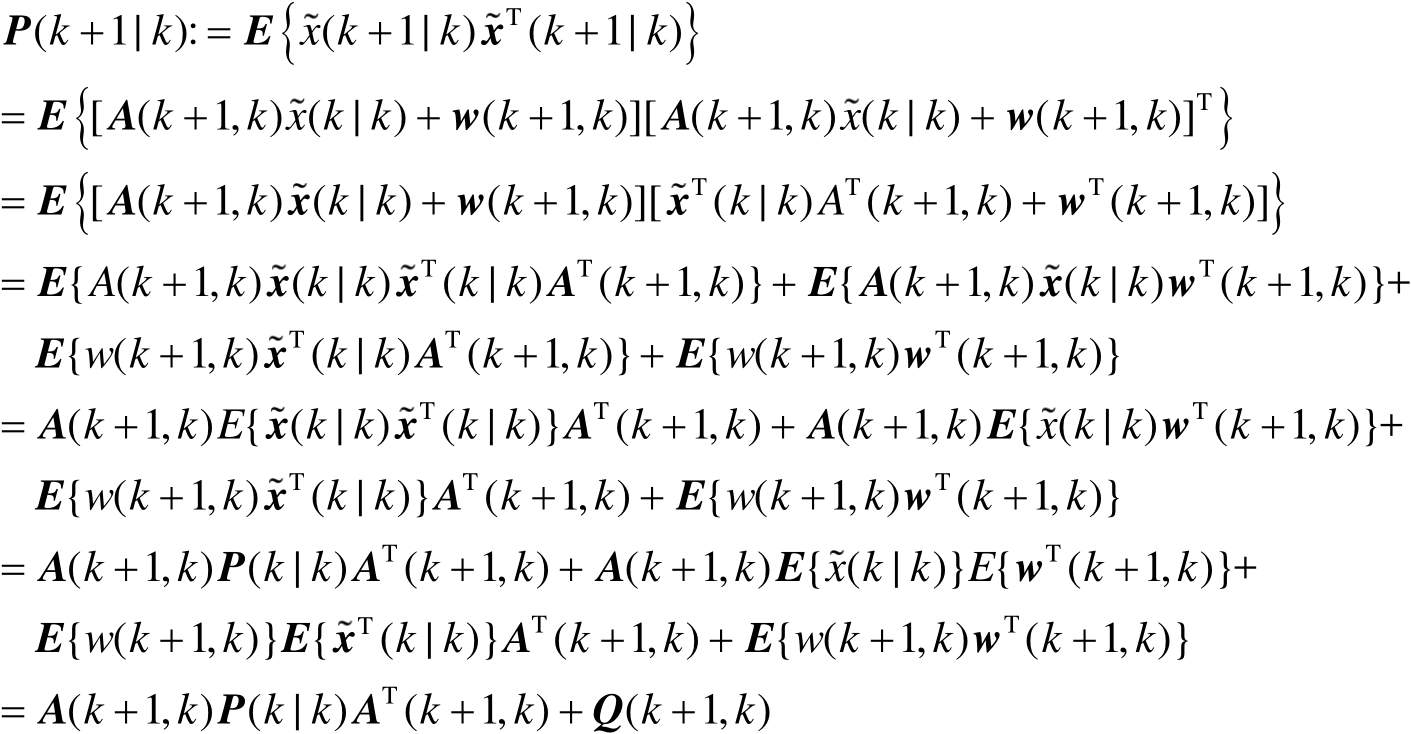
(2.1.7)
(2)基于观测模型即式(2.1.2),计算观测值 y ( k +1) 的一步传播预测估计值:

(2.1.8)
测量预测误差:
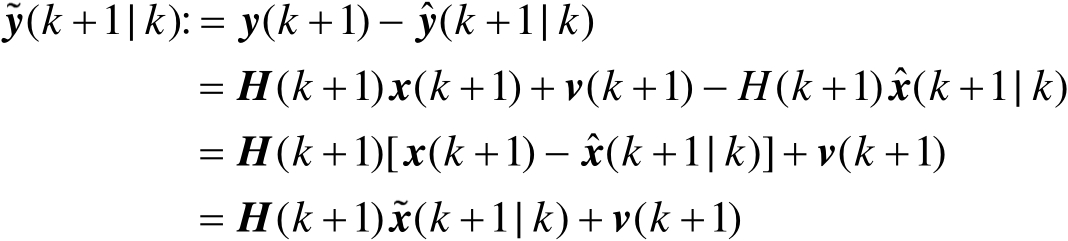
(2.1.9)
(3)设计估计状态变量 x ( k +1) 的线性卡尔曼滤波器:

(2.1.10)
其中, K ( k +1) 为待定的最优增益矩阵。
(4)利用正交定理求取最优增益矩阵 K ( k +1)。计算状态变量 x ( k +1) 的估计误差:

观测向量值 y ( k +1) 的正交分解表示:

由正交定理

(2.1.11)
有
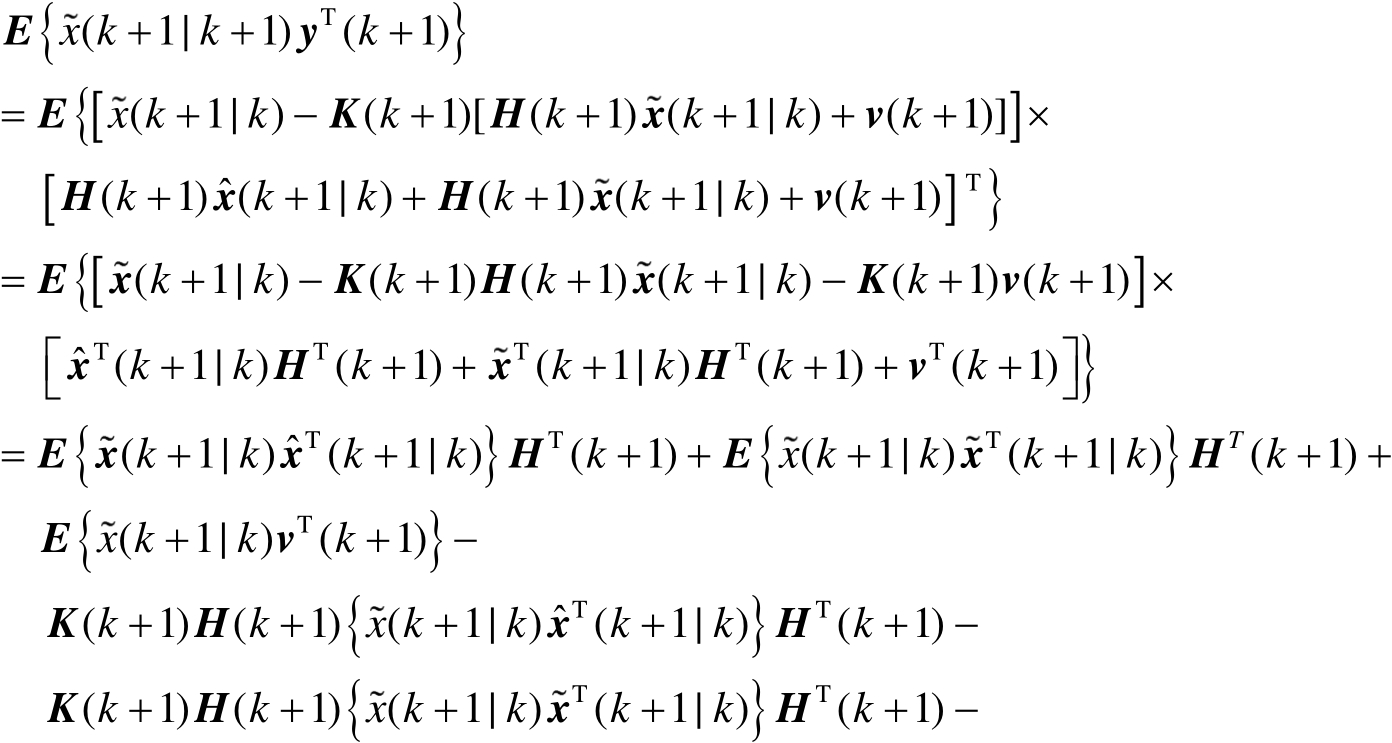
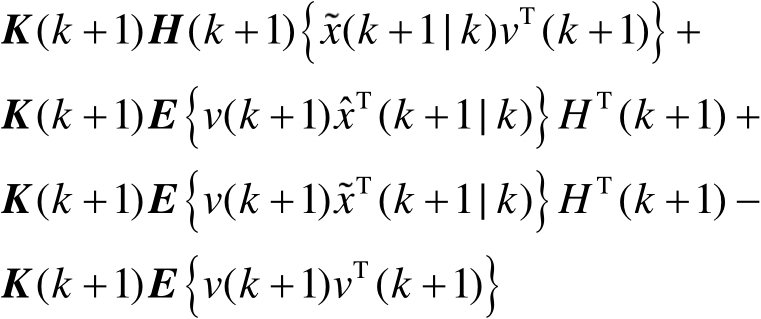
上式进一步可得

对上式求解,可得

(2.1.12)
(5)计算状态变量 x ( k +1) 的估计误差协方差矩阵:
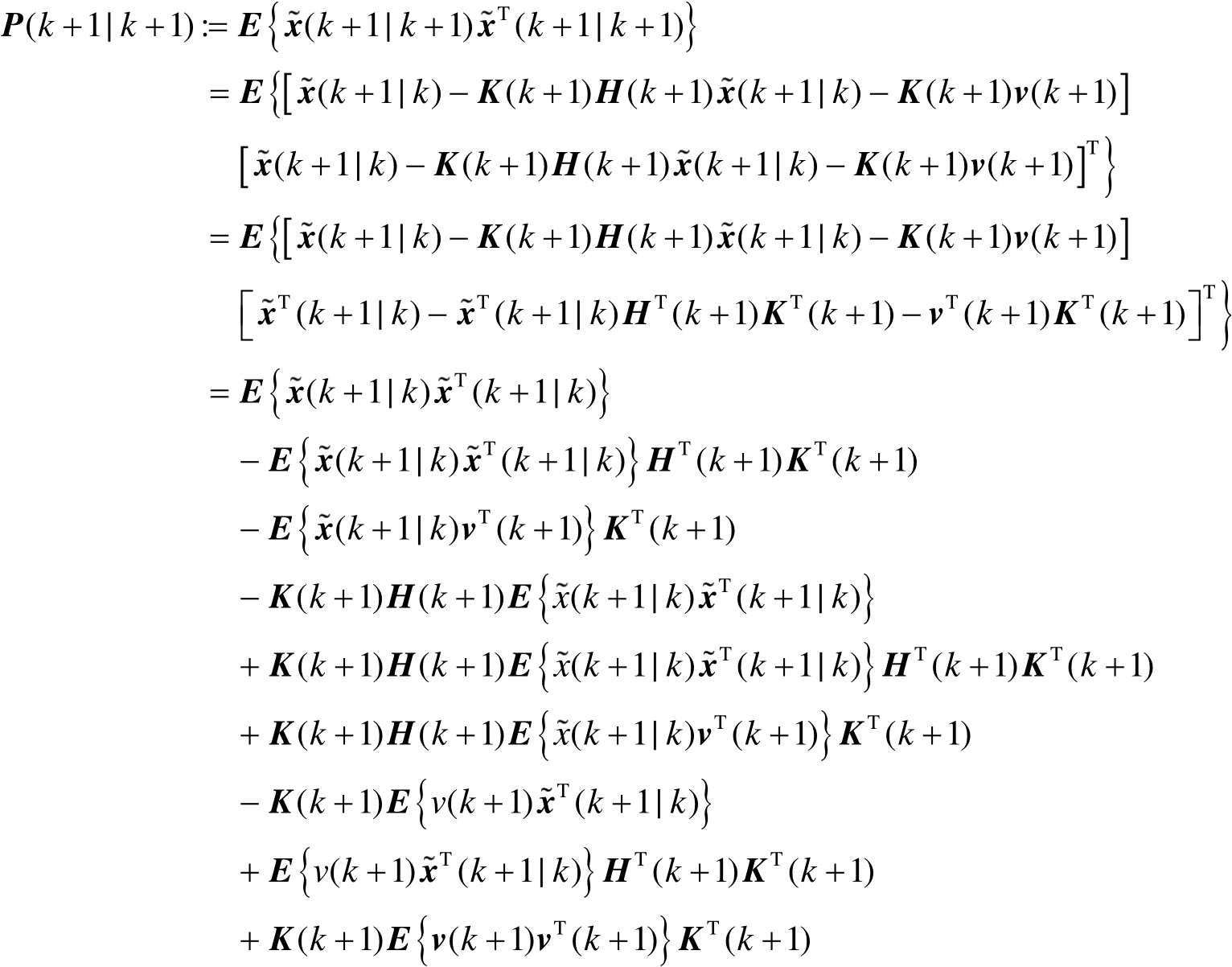
上式进一步可得
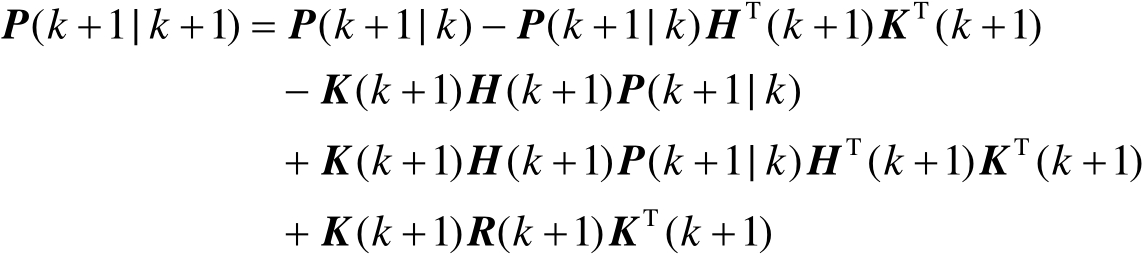
再进一步,可以得到状态变量 x ( k +1) 估计误差协方差矩阵的简化形式:
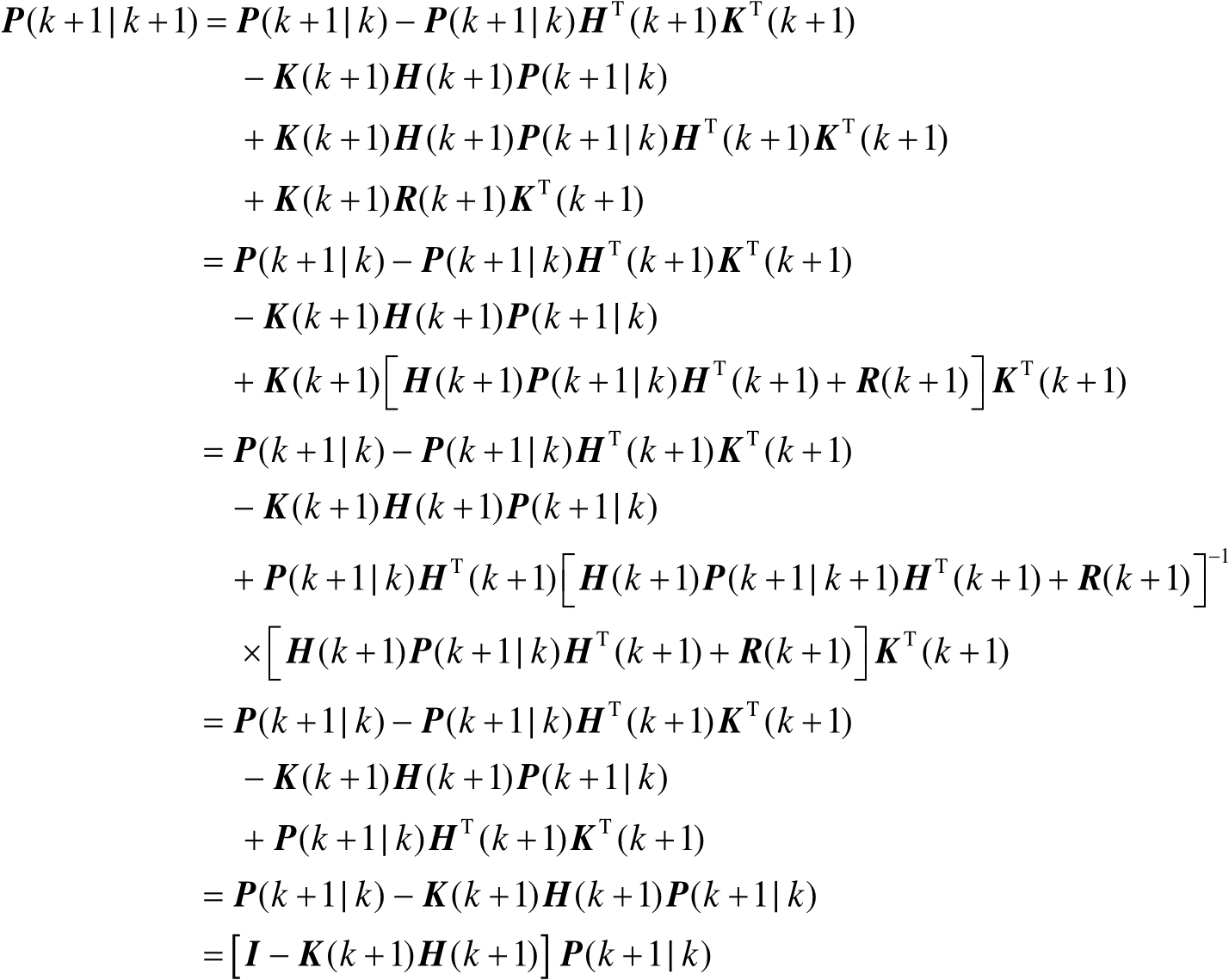
(2.1.13)
2.1.3 误差协方差及最优增益矩阵的几种变形计算公式
前面已经给出了最优增益矩阵和误差协方差的递推关系。然而,在讨论卡尔曼滤波的特殊问题时,有时还需要用到 K ( k ) 和 P ( k | k ) 的其他表示形式。下面给出几个比较常用的基本形式。

(2.1.14)



2.1.4 基于转移概率的线性卡尔曼滤波器设计
下面给出基于转移概率的线性卡尔曼滤波器设计方法。
(1)计算观测预测误差的协方差矩阵。
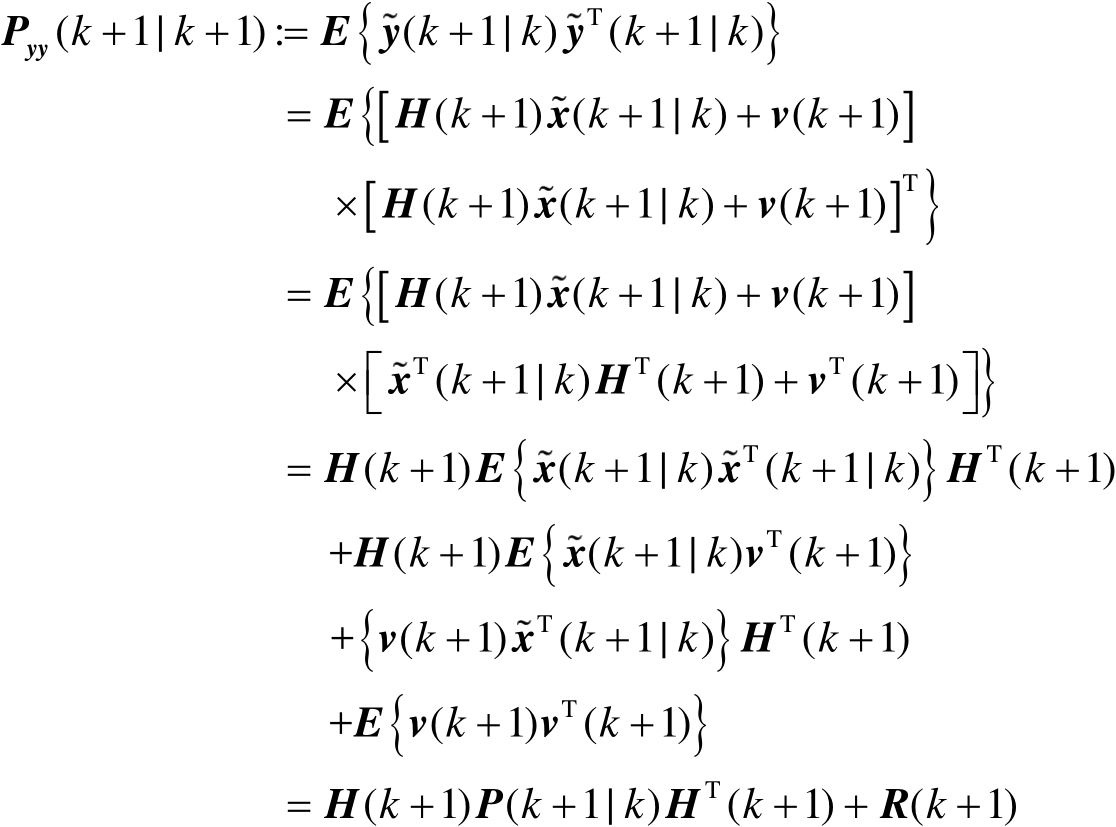
(2.1.15)
(2)计算状态预测误差与观测预测误差之间的交叉协方差矩阵。
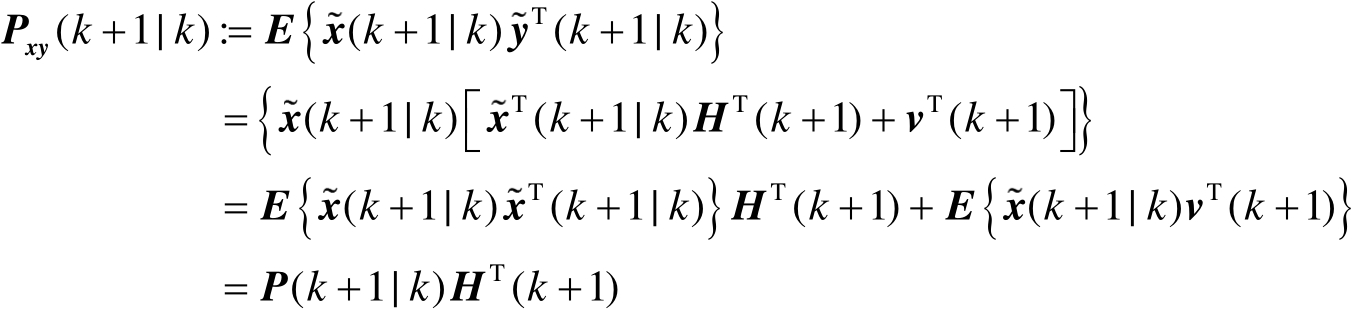
(2.1.16)
(3)设计基于转移概率的线性卡尔曼滤波器。

(2.1.17)
其中,滤波器增益矩阵 K ( k +1) 为

(2.1.18)
(4)计算状态变量 x ( k +1) 的估计误差协方差矩阵。
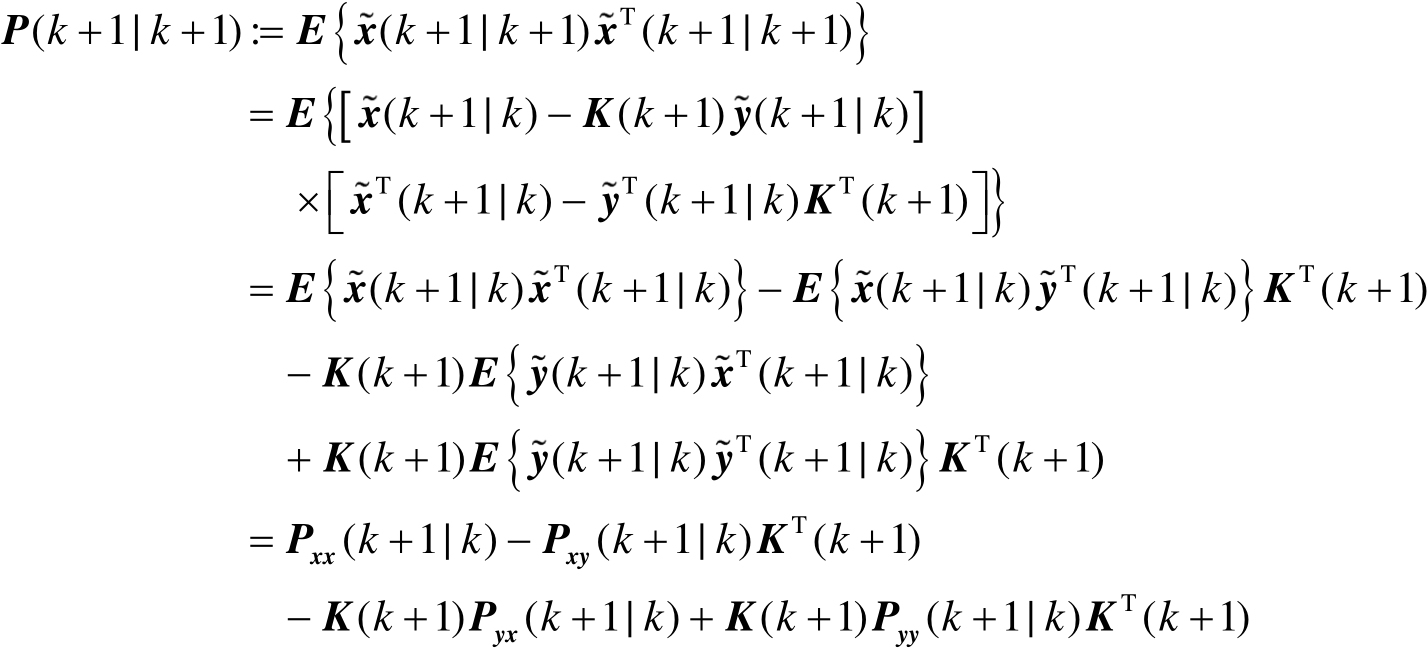
(2.1.19)
进一步,可以得到状态变量 x ( k +1) 估计误差协方差矩阵的简化形式:
(2.1.20)
卡尔曼滤波方法包括两个主要过程:预测与校正。预测主要利用状态转移方程获取当前状态的先验估计值,并得出当前状态变量和误差协方差估计值,以便为下一时刻的状态构造先验估计值;校正过程是一个反馈的过程,利用观测方程在预测过程的先验估计值及在当前测量值的基础上获得对当前状态的估计值。卡尔曼滤波是一种最优化自回归数据处理方法,在民事领域和军事领域得到广泛应用 [2-5] 。