
下载掌阅APP,畅读海量书库
立即打开



灵巧手是机器人末端执行器的一种,是直接执行任务的装置,对提高机器人的柔顺性和操作性有着重要的作用。在灵巧手取书应用中,如何在不同环境下稳定地抓取书本一直是灵巧手领域的研究难点,这对灵巧手的结构设计提出了较高的要求。然而,现有的通用机器人手无法完成书本的抓取任务,现有的取书机器人手存在抓取不稳定及应用场景受限的问题。因此,本课题基于抓取平铺在桌面上的书本和紧密排列的书本这两种应用场景,提出了一种可重构的欠驱动三指灵巧手,完成了灵巧手机电系统搭建,并根据人手取书的特点提出了灵巧手的抓取规划。
现有的取书机器人手大多为两只夹持器,只能进行书架上书本的抓取任务,应用场景非常单一。本课题受人手取书过程的启发,在灵巧手的结构上进行创新。针对紧密排列的书本和桌面上的书本这两种常见的书本状态,提出了灵巧手的基本功能模块:
(1)平行夹取功能模块:书本是一种形状规则的薄物体,其上下表面互相平行,平行夹取可以保证手指与书本表面有较大的接触面积,降低了接触力要求,能够提高抓取稳定性。
(2)主动表面功能模块:灵巧手在接触书本时,由于结构限制,多数情况下手指只能接触书本较边缘的位置,这导致抓取后书本重心在手指外侧,不利于抓取稳定性。手指的主动表面可以在抓取过程中使书本的重心更靠近手掌,提高稳定性和抓取成功率。
(3)可重构功能模块:本课题设计的灵巧手需要抓取平放在桌面上的书本及紧密排列的书本,结构较为固定的灵巧手难以完成不同环境下书本的抓取任务,因此引入可重构功能模块,可以根据不同应用需求改变手指的构型,满足不同环境中的抓取任务。
基于这些功能模块,完成了灵巧手的结构设计,进行欠驱动手指运动学分析,并结合灵巧手的抓取任务,确定了主要结构参数,得到了灵巧手的工作空间及平行夹取范围,以验证结构的合理性。搭建了灵巧手的机电系统,上位机能够对灵巧手进行实时控制。最终,基于UR5e机械臂平台进行灵巧手的取书试验,实现了对不同环境下书本的稳定抓取。
针对本课题提出的功能模块,进行灵巧手模块化结构设计,整体结构包含三大模块:欠驱动手指模块、主动表面拇指模块、底座模块。
欠驱动手指的运动由丝杆螺母结构实现,并通过曲柄滑块结构,将直线运动转化为旋转运动。手指含有上下两节指骨,下端指骨与连杆、基座组成平行四连杆结构,主要起到传动作用,实现平行夹取功能。上端指骨与书本直接接触,设计了一个滑块结构,可以根据不同接触条件给书本提供不同摩擦程度的接触面。此外上端指骨与下端指骨通过弹簧连接,形成欠驱动关节,使灵巧手具自适应能力。
主动表面拇指的主动面是一根同步带,在抓取过程中,同步带运动带动书本在手指上移动,这个过程结束后,书本的重心更加靠近手掌,能够实现更加稳定的抓取。
灵巧手的驱动器(直流电机)和齿轮传动机构集成在底座中,底座中的电机可以通过上下两层齿轮组,实现手指的重构功能和开合动作。灵巧手共 3 个主动自由度,两个欠驱动手指的运动同步,但手指的重构功能和开合动作独立分离。
灵巧手的欠驱动手指分为两个部分:曲柄滑块机构、RRP型连杆机构。分别对这两个机构进行运动学分析,得到欠驱动手指的运动学模型。结合运动学模型与灵巧手的性能指标,确定了灵巧手的结构参数。所设计的灵巧手整体尺寸为120 mm×90 mm×210 mm,拇指长115 mm,欠驱动手指上端指骨长 50 mm,下端指骨长 60 mm。
根据所确定的参数,在MATLAB Robotics toolbox工具箱中利用蒙特卡洛方法求解灵巧手工作空间,并得到平行夹取范围。结果表明灵巧手具有较大的工作空间及平行夹取范围,满足性能要求,能进行复杂环境下的抓取任务。
本课题利用 3D打印工艺完成了灵巧手样机的制作,整体质量约为 0.8 kg。此外,搭建了灵巧手控制系统,定义了一种指令包格式,并编写了下位机的指令解析程序,上位机能对灵巧手进行实时控制。
最终基于UR5e机械臂平台进行灵巧手取书试验。首先根据人手取书的特点,本课题分别提出了针对桌面上书本和紧密排列书本的抓取规划,结合所设计的灵巧手的结构优势,简化了人手取书过程的一些步骤,使取书过程更加简单可靠。试验结果表明,灵巧手在抓取桌面上的书本时能够有效地将书本下表面与桌面分离,主动表面拇指能够使书本重心向内移动,实现更稳定的抓取;灵巧手在抓取紧密排列的书本时能够将目标书本与周围书本有效分离,抓出目标书本的同时不影响周围书本的排列。在抓取对象方面,灵巧手最小能够抓取 0.1 mm厚度的A4 纸,最大能抓取 300 mm×200 mm×20 mm的书本。灵巧手的抓取稳定性和环境适应性优于现有的取书机器人手。
(1)本课题进行灵巧手结构上的创新,提出了一种具有可重构功能的欠驱动三指灵巧手。提出的灵巧手共 3 个主动自由度,能平行抓取书本,并能根据不同的场景重构欠驱动手指,完成所需的抓取动作。
(2)对灵巧手进行运动学分析,建立单根欠驱动手指的运动学模型。根据性能指标确定结构参数,并得到灵巧手工作空间和平行夹取范围,验证了所设计结构的合理性。
(3)完成灵巧手机电系统搭建,基于UR5e机械臂平台进行取书试验,能分别对桌面上书本和紧密排列书本进行稳定抓取,抓取对象涵盖 0.1 mm厚度的A4 纸到 20 mm厚度的书本,试验结果优于现有的取书机器人手。
(1)通过连杆欠驱机构与基于滑块与同步带的主动表面结构,构建一种能够抓取薄状物体的灵巧手。
(2)基于可重构机构手掌,使灵巧手具有多种变形模式,实现多种抓取任务。
(3)通过模仿人类抓取薄物体的动作,提出灵巧手抓取薄状物体规划方法。
灵巧手三维图与实物图如图 1 所示,桌面书本抓取效果图如图 2 所示,紧密排列书本抓取效果图如图 3 所示。
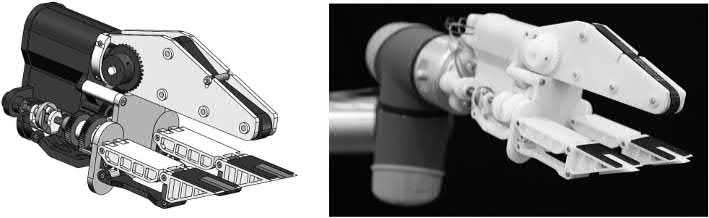
图 1 灵巧手三维图与实物图
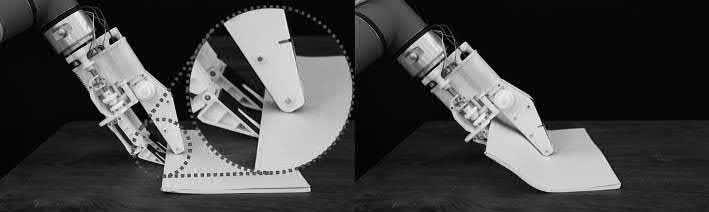
图 2 桌面书本抓取效果图
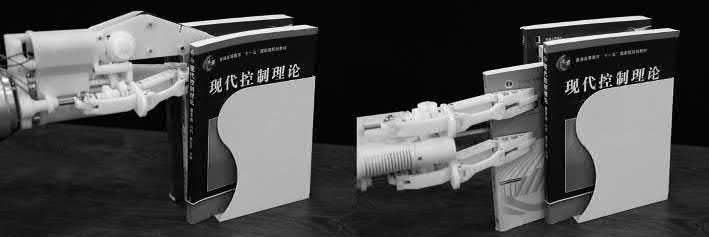
图 3 紧密排列书本抓取效果图
高校指导教师:董会旭;企业指导教师:翁敬砚