
下载掌阅APP,畅读海量书库
立即打开



双机械臂机器人协作控制技术是通过将两个机械臂机器人协调起来进行协作控制来共同完成某项任务的技术,以其特有的高灵活性、高负载性以及处理复杂环境中任务的能力越来越受到学术界和工业界的广泛关注。目前,学术界和工业界在双臂机器人协作技术上已经有很多成熟的技术以及产品,不少已经在生产车间、医疗手术和服务业中得到广泛应用。然而,目前业界较为成熟的技术与机械臂实物绑定过深,同时很多是预先设定好的死程序,难以满足更高程度的实时性需求,简单而言,学术界和工业界尚缺乏一套成熟的能适应不同种类机械臂(或者不依赖于协作采取的机械臂种类)且能够实时响应的双机械臂机器人协作控制系统。而满足这样需求的控制系统对医疗手术(如生物修复材料打印手术)、智能制造柔性产线以及面向复杂场景的服务机器人又十分必要,因此具有较大的研究价值与商业价值。
本课题着眼于利用点云环境感知与层次长短程安全控制框架,开发一套适应不同种类机器人且能够实时响应的安全协作控制系统。
本课题着眼于借助点云环境感知以及层次长短程安全框架来实现双机械臂机器人协作控制系统,具体来说包括四部分工作,点云环境感知算法的设计与实现是第一部分,针对层次长短程安全控制框架有三部分工作,该框架是将一个控制问题分解为三部分——针对长程任务的长程规划(提供安全轨迹参考)、针对短程实时避让的短程规划以及长短程协同调度算法,需要针对本课题面对的具体问题分别进行设计。
点云环境感知算法不仅要求感知正确的环境信息,即将噪声与机械臂本体从点云信息中分割出来,同时也要满足较高的实时性要求,否则机械臂无法得到实时信息而进行避让。为了得到更高的实时性,采取了基于机器学习的聚类算法以及匈牙利匹配算法对点云目标进行分割与识别,并根据这一基本思路设计了相应的点云预处理算法,得到方便进行点云聚类与识别的点云信息,最终获取带有标记的点云信息,将标记为噪声以及机械臂的信息滤除即可得到环境信息。
长程任务规划不仅要求能够在复杂非凸的环境下成功进行路径规划,同时由于其在控制过程中可能被触发,对其规划效率也有一定的要求。本课题对此进行了专门的调研,提出将点云环境信息以八叉图的形式注入规划环境中以加速碰撞检测,采取RRT-Connect算法高效地在复杂非凸环境下找到离散轨迹点,并对轨迹点进行优化和插值处理得到需要的等频安全参考轨迹。
短程任务规划需要对当前的轨迹进行实时修正,因此对其实时性要求很高,同时其修正结果应当具有良好的避开实时环境障碍的能力。本课题提出了基于优化的轨迹实时修正算法,通过将短程避让问题转化为优化问题并给出解析解,可以高效地(对计算机而言几乎不消耗时间)给出修正轨迹并进行执行。
长短程协同调度算法需要综合长短程的规划特点,对两者进行综合调度,以保证能够安全且高效地完成协作任务。本课题提出了基于令牌桶算法以及避让算法的长短程协同调度方法,基于此并综合前述的所有工作实现了一套适应不同种类机器人且能够实时响应的安全协作控制系统。
首先通过对比考察不同主流设备的帧率(实时性要求)、点云稳定性、设备支持性、深度有效范围等指标,选取综合性能最好的深度传感设备;接着进行预处理算法,利用ROI提取和相机模型理论将深度图转化为点云图,并且通过直通滤波、体素下采样策略将稠密点云稀疏化,保证实时性能;最后通过基于机器学习的DBSCAN聚类和基于IoU的匈牙利匹配算法实现点云的分割与识别,成功获取机器人、环境、噪声三部分的实时信息。通过将两个机器人来回移动的场景作为输入对算法进行验证,试验证明文章中提出的算法对于双臂协作机器人的感知是有效的。
首先将点云环境信息以八叉图的形式注入到规划空间中,再利用RRT-Connect算法获取面对当前静态环境可以安全避障的离散轨迹点,对离散轨迹点进行三次样条优化和插值获取具备安全性和光滑性的等频离散参考轨迹。最后,针对仿真环境对长程规划算法进行了试验验证,验证成功后在真实的静态机器人协作场景进行试验,最终证实了本算法具备为短程规划算法提供针对当前环境信息下具备安全性和光滑性的可行轨迹的能力。
首先对机器人进行动力学建模,并且通过手眼标定等方法了解世界坐标系与深度相机坐标系之间的转换关系,并基于此开发了从点云计算距离机器人最近的稳定位置信息以及相关的梯度信息的算法。基于位置信息、梯度信息、距离信息以及长程规划的轨迹参考,将避让问题转化为优化问题,基于优化理论给出了不同情况下短程规划算法的实时修正策略。最终让机器人执行一个简单的任务并人为进行高频干扰测试算法效果,试验证明本课题提出的短程规划算法具有良好的实时避让能力,可以为长程规划的轨迹参考提供有效的轨迹修正。
本部分工作中提出了长短程协调控制器,利用令牌桶算法与避让算法实现了短程规划对长程规划的实时触发与现场保护,将长程规划与短程规划协调在一起对机器人进行控制。结合前述所有工作,将两台Franka机器人置于同一工作空间进行协作,通过试验验证,长短程协调控制器可以让机器人之间不发生相互干涉而协同工作,证实了本课题工作的可行性。
(1)本课题所提出的点云环境感知算法可以很好地分割与识别噪声信息、机器人本体信息以及环境信息,在两个机器人工作的场景中表现出良好的效果。同时通过统计算法的运行时间,得出其平均运行效率达到了 35 Hz以上,有较好的实时性。
(2)本课题所提出的长程规划算法具备为短程规划算法提供针对当前环境信息下具备安全性和光滑性的可行轨迹的能力,无论在仿真环境下还是在实际物理环境下都能给出有效的安全避障参考轨迹。同时其规划时间均在 100 ms左右,相比其他规划方法具有较高的效率。
(3)本课题所提出的短程规划算法具有良好的实时避让能力,在真实环境试验中成功避开了人为造成的高频干扰并最终成功完成所规定的任务,可以为长程规划的轨迹参考提供有效的轨迹修正。
(4)本课题所提出的长短程协调控制器可以让机器人之间不发生相互干涉而协同工作,在两台Franka机器人的协同工作中表现良好并最终完成目标任务,同样验证了本课题所有工作的有效性。
(1)本课题提出了通过基于机器学习的DBSCAN聚类以及基于IoU的匈牙利匹配算法对点云进行分割和识别以获取机器人本体、环境以及噪声三部分信息的算法,不仅具有良好的识别效果,而且具备更高的实时性。
(2)本课题提出了基于优化的短程避让算法,通过将实时避让问题转化为一个优化问题并给出解析解,高效地为机器人提供了不同情况下的实时避让策略,并通过试验验证了其有效性。
(3)本课题提出了基于令牌桶算法以及协作避让算法的长短程协同调度算法,通过按一定规则维护一个令牌桶来决定对长短程规划的调用并进行现场保护,通过试验证实了其具备的有效性。
本课题的整体设计图如图 1 所示。
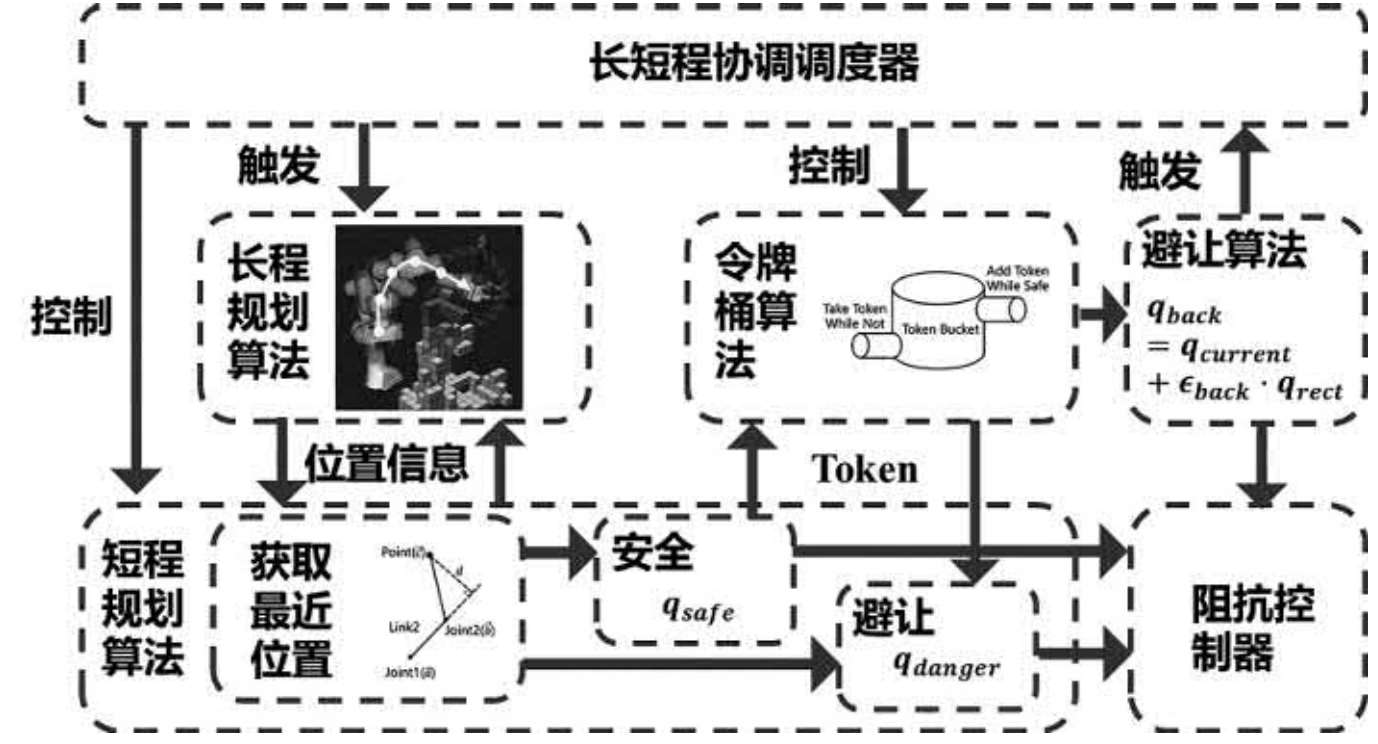
图 1 整体设计图
高校指导教师:胡楚雄;企业指导教师:丁克