
下载掌阅APP,畅读海量书库
立即打开



近年来,随着我国铁路事业的飞速发展,铁路交通速度、运载、运量、里程等方面快速提升。随之而来的是,铁轨及扣件更换维护的工作量和工作频率也在逐渐增加,根据各铁路局统计的数据,正常情况下铁轨大约每 10 年更换一次,即每年需要更换铁轨总量的 10%,目前国内外对换轨作业中扣件的拆装回收等工作,仍然停留在人工作业方面,对每个单元铁轨的旧扣件回收需要 12 人以上。尤其针对铁路Ⅲ型这种新型扣件,人工作业效率低,人工成本高且存在很大的安全隐患,为解决相关问题,本课题将面向换轨作业过程,对过程中铁路Ⅲ型扣件快速拆装系统展开系列研究。具体为:进行合理的机械结构设计,设计针对Ⅲ型扣件的拆装装置,同时将铁路Ⅲ型扣件的抓取、拆装、回收等操作功能集成于一个系统,实现“一机多用”;利用工业六轴机械臂及机器视觉技术,实现扣件拆装位置识别定位与精准拆装,提高作业精度;进而实现机械化、自动化作业,减少人力,提高工作效率,避免安全事故。为面向Ⅲ型弹条的换轨、检修、维护等领域提供参考案例。
本课题基于在铁路智能换轨作业领域的国内外研究现状及当前存在的问题和需求,在机械结构(包括取放、拆装、装载等)、视觉识别与定位以及运动控制规划等方面进行创新设计,实现扣件识别与定位、扣件拆除、新扣件安装等功能。具体研究内容如下:
(1)完成铁路Ⅲ型扣件快速拆装系统设计和三维模型建立,包括Ⅲ弹条及轨距块等取放与拆装机构、装载装置;完成拆装机构载体(轨道车)设计。
(2)完成铁路Ⅲ型扣件整体系统加工、组装与调试任务。
(3)完成基于三维视觉的扣件识别与定位算法研究,辅助拆装系统完成拆装定位操作。
基本原理及重点研究内容如下:
(1)基于三维视觉技术,利用高精度三维面结构光相机实现Ⅲ型扣件的识别与定位。
(2)设计制作基于三轴或六轴机械臂、电缸推杆装置且适用于Ⅲ型扣件及轨距块等的拆除与安装机构。
(3)基于C#等上位机编程,设计创新算法,实现Ⅲ型扣件及轨距块等更换收集与安装控制。
对Ⅲ型扣件(包括Ⅲ型弹条和轨距块)的拆装是本课题重点研究内容之一。Ⅲ型弹条成型工艺复杂、标准要求高,制作工艺流程包括切断、倒角、加热、三序成型、淬火、回火、发黑等。因其不规则形状,对于Ⅲ型弹条的拆装,目前大多采用手工操作专用工具进行,费时费力。基于此,首先重点解决对Ⅲ型弹条的拆装问题,设计模块化拆装机构,达到功能要求;进一步完成扣件抓取装置的设计,创新设计二指平动机械爪,可同时实现对Ⅲ型弹条和轨距块的抓取;设计两功能模块的电气系统,根据实际作业空间要求,设计车架底盘及电气系统。
本课题所研究的快速拆装系统需要完成对扣件的精准抓取、搬运、摆放及回收等操作。通过防水、防尘、大负载设计的三轴操作机器人,操作末端可实现 x 、 y 、 z 三轴移动,安装操作简单,但无法根据实际情况灵活调整操作末端姿态以合理协助对扣件的拆装作业。因此选择六轴机械臂来进行相关作业。
针对工业六轴机械臂展开数学模型建立与运动学分析,并在仿真软件中进行轨迹规划等模拟验证,通过C#编程,基于远程通信协议,实现对机械臂的上位机远程控制,并对其进行手眼标定算法研究。
接着对Ⅲ型扣件定位的机器视觉技术做出研究,通过图像预处理、ICP配准等,精准定位扣件拆装位置,以控制各执行模块完成既定任务。同时完善扣件的存储及回收装置,各功能复合,实现对扣件的精准抓取、拆装及回收。
机械装备控制系统是现代工业生产过程中至关重要的一部分,为提高工作效率和质量,需要对装备的控制系统进行合理的设计及优化,并对操作过程做实时监控和调节。对此Ⅲ型扣件快速拆装总控制以及各子功能模块控制系统做出设计,并根据系统的需求和要求,详细介绍了铁路Ⅲ型扣件抓取、拆装等关键操作步骤的工艺控制策略,并利用软件建模验证方案可行性,同时控制过程中采用多线程并行控制,大大提高了工作效率及装备自动化程度,进一步提高了工作质量及稳定性,为后续的样机调试试验奠定基础。
通过激光切割、焊接等方式对整体样机零部件进行制作加工,并利用 3D打印等进行模型试验,结果验证了各功能模块机械结构的可行性。完成对底盘车架的设计加工,并将基于车架进行其他零部件的装配。此外,基于美观、安全、可靠、操作便捷等原则,对各个区域(控制、操作、储料/回收等)做出合理布局,并设计系统外观。
(1)对国内外弹条(主要针对Ⅲ型)、轨距块的拆装装置、扣件定位装置、扣件检测技术等做了充分调研与分析,总结此领域现阶段的发展现状以及存在的问题。发现目前针对Ⅲ型扣件的自动化快速拆装,总体还在人工作业或半自动化作业阶段,虽然有一些相关装置的专利,但大多停留在理论层面,未能进行实际应用,该领域空白还比较大,进一步确定了本课题研究的意义和必要性。
(2)通过对工作环境的实地考察以及对Ⅲ型扣件的实物测绘,对铁路Ⅲ型弹条及轨距块设计大推力拆装装置,解决了重难点问题,对扣件装载装置、一体化机械爪等功能模块提出多种设计方案,通过试验对比选出最优方案,并制作实物模块进行验证。各模块方案确定后,统一设计拆装系统的布局,包括底盘设计、应力分析、车轮选型、电机及减速机选型等,使用国标方钢与钢板,通过切割焊接等技术制作装备底盘。
(3)基于伯朗特机器人公司的BRTIRUS1820A型六轴机械臂进行扣件搬运的方案设计,利用MATLAB建立了该机械臂的运动学模型,并进行运动学正逆解;此外,基于蒙特卡洛法求解了机械臂在二维面和三维空间的工作空间,并且对机械臂抓取弹条的过程做轨迹规划。根据以上理论研究结果,对该机器人实物进行试验操作,学习使用了Modbus TCP协议,编写C#程序对机械臂进行调试和开发,实现了对扣件的抓取、协助拆转以及回收等操作。结果符合预期。
(4)在机器视觉方面,借助RVC-X型高精度面结构光相机,利用三维结构光技术进行图像处理,相机拍摄图片后,对铁路Ⅲ型扣件图片进行预处理,继而提取特征点云图像,进而进行眼在手外的手眼标定解算,得出目标物体(扣件)在机器人坐标系下的位姿,进行了ICP精确配准,可以实现机械臂对扣件的精准抓取,满足任务要求。
(5)搭建了扣件拆装装备的电气系统,对扣件抓取装置、扣件拆装装置、车体移动装置等子装置的电气系统进行设计,确定整体电气系统构架以及整个系统的电路拓扑结构。
(6)搭建了扣件拆装装备的控制系统,对扣件抓取装置、扣件拆装装置、车体移动装置等子装置的控制系统进行设计,优化控制方案,提高系统工作效率及稳定性。
(7)在实际场景中,对此扣件拆装装备进行整机装配,并设计产品化外观。
(1)基于小负载电动推杆以及短杠杆装置,模块化创新设计针对铁路Ⅲ型弹条的一体化快速拆装装置。
(2)基于高精度三维面结构光相机,通过系列对扣件点云图的处理,准确获取扣件安装位置。
(3)基于C#编程,通过远程通信的方式,将视觉处理结果发送至机械臂端,从而实现精准抓放及拆装。
(4)将铁路Ⅲ型扣件的装载、拆装、回收等功能装置集成到扣件拆装系统中,并设计优化控制策略,达到高效、准确、安全、可靠作业。
关键功能模块设计图如图 1 所示,Ⅲ型扣件快速拆装系统装配设计图如图 2 所示,Ⅲ型扣件快速拆装系统产品设计图如图 3 所示,Ⅲ型扣件快速拆装系统样机初步装配图如图 4 所示。
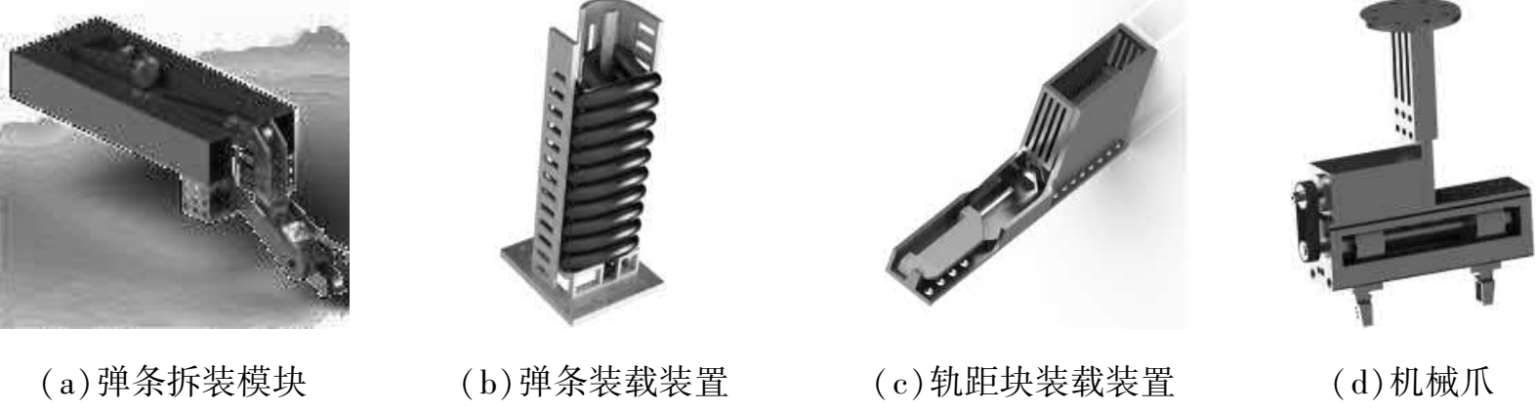
图 1 关键功能模块设计图
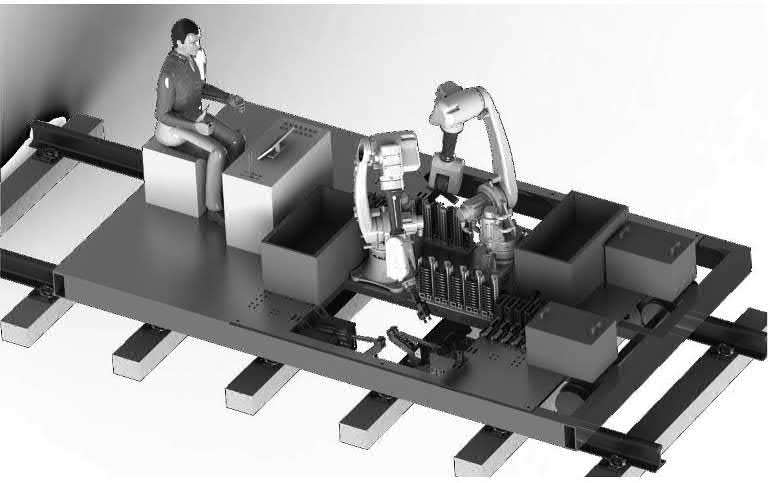
图 2 Ⅲ型扣件快速拆装系统装配设计图
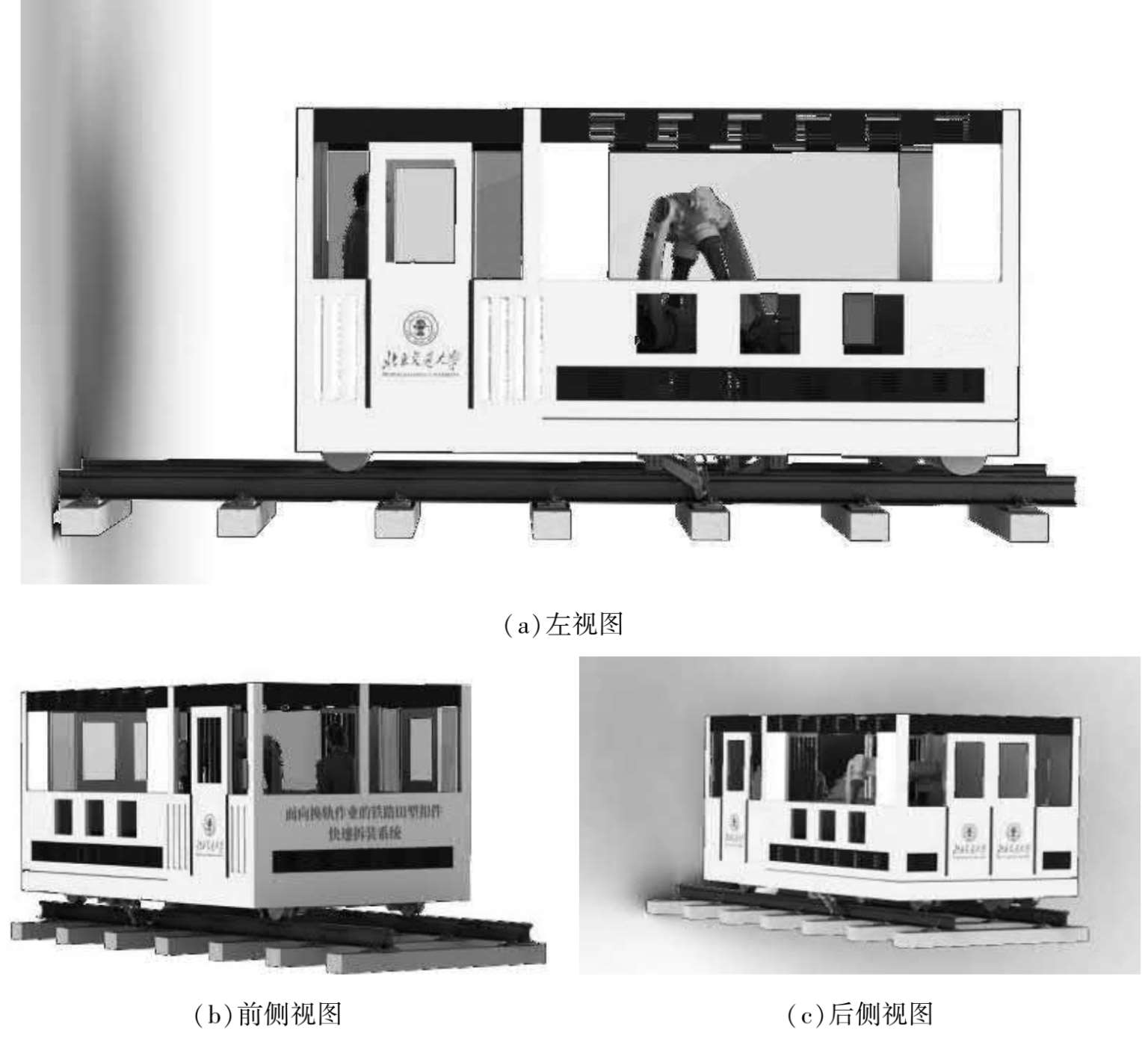
图 3 Ⅲ型扣件快速拆装系统产品设计图
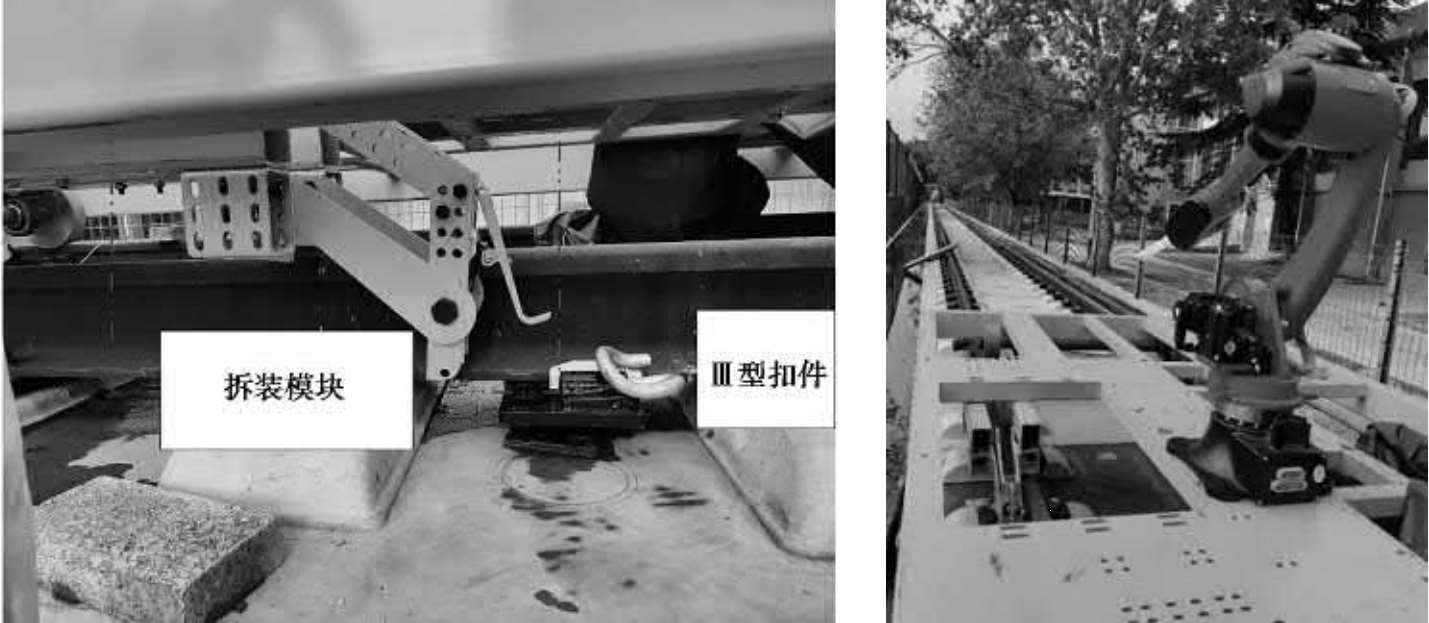
图 4 Ⅲ型扣件快速拆装系统样机初步装配图
高校指导教师:刘笃信;企业指导教师:刘 景