
下载掌阅APP,畅读海量书库
立即打开



实现复杂柔性结构的精确制造,并根据设计精准赋予其内部定向磁化排布性能,是目前开发新型高效磁柔性复合执行器亟待解决的难题。增材制造作为一种扩展能力强的制造技术,在外场辅助复合材料形性一体化制造方面应用广泛。其中,立体光投影技术在声、磁、电、热学等外场辅助下可有效实现微观性能的排布与宏观结构的精准制造,是制造磁柔性复合执行器的优选技术。
然而,现有制造磁柔性执行器的研究大多使用单一材料,在一定程度上限制了磁驱性能,使得应用效果不及预期。多材料制造技术具有集成多种功能性材料的优势,是一种可观的拓展磁柔性执行器结构和功能的方式,在基于光固化原理的增材制造技术中也相对易于实现。
为磁软体机器人设计复杂的结构与内部磁排布,使其实现复杂多样的功能是目前该领域的研究趋势。而这种实现方式是由制造工艺决定的,主要包括折叠充磁、粘接组装和增材制造。其中折叠充磁制造方式会限制磁排布的设计;粘接组装法制造操作困难、生产效率低。在增材制造技术中,基于墨水直写的制造方法,限制磁排布方向在二维平面内。与之相比,基于光固化原理的制造具有复杂结构的制造能力,且在磁排布方向上更加自由。因此,本课题选择基于DLP光固化原理的制造方法进行打印。为了使硬磁颗粒排布均匀,可采用匀强磁场线圈进行磁排布。本课题的研究内容包括多材料磁场辅助制造装置的搭建,工艺流程的设计和应用案例的制造三部分。
多材料磁场辅助制造装置要实现具有产生三维排布磁场,实现材料更换以及固化-清洁功能的切换,实现多层打印的功能。基于亥姆霍兹线圈原理设计了三维辅助磁场方式。通过比较旋转切换和平移切换两种方案,最终选择直线滑台进行材料的平稳更换。在清洁方案的选择上,真空抽吸和空气射流方案受泵和抽滤瓶规格的限制,加上树脂的黏稠度高,硬磁颗粒体积小,对黏附在成型平台上的磁性浆料几乎没有清洁能力。而酒精射流方式占地面积大,不适合与其他装置进行耦合。因此,选择酒精浸泡方案进行清洁,但要注意酒精浸泡的时间,时间过长会损坏印刷特征。
多材料磁场辅助制造工艺流程的设计原理:在排布磁场的作用下,硬磁颗粒在打印过程中实时排布,通过DLP数字光处理系统的选择性固化,固定硬磁颗粒的位置和朝向,之后通过水平换液系统实现清洁和更换材料的功能,完成对具有复杂磁化结构的多材料执行器的快速制造。工艺流程包括原料的制备和打印两部分,通过软硬件结合,实现整体装置的运行。
多材料磁软体机器人的形变原理:样条的韧性树脂部分均匀分布了被预先排布的硬磁颗粒,将其置于匀强磁场环境中,若硬磁颗粒的排布方向与外部磁场不同,外部磁场会对嵌入的硬磁颗粒诱导转矩,这些磁转矩产生内部应力,共同导致复杂形状变化的宏观响应。因韧性树脂部分的弹性模量大,柔性树脂部分的弹性模量小,在磁转矩的作用下,柔性树脂部分更容易发生形变,起到类似“折痕”的作用。由上可知,含磁韧性树脂部分充当的主要是“驱动”职责,而柔性树脂部分则承担“执行”功能。基于上述原理,设计制造了一系列含磁样品。
设计并搭建了多材料磁场辅助制造装置,由DLP数字光处理系统、厚度控制系统以及水平换液系统三部分组成。基于亥姆霍兹线圈,设计了三维辅助磁场发生装置,并将其与普通料槽支架、清洁装置集成到水平换液系统中,通过水平平移机构实现各制造工位的切换。最终搭建的装置成形面积为 50 mm×50 mm,可以实现连续多层打印,层厚最小可达 100 μm,制造精度为 0.1 mm,能完成两种材料的成型,实现硬磁颗粒的可编程性排布。
为了实现具有复杂形状与磁化排布的多材料磁控柔性执行器的制作,提出了一种多材料磁场辅助制造工艺流程;通过软硬件开发,最终能实现多材料磁场辅助装置按照所设计的工艺流程成功运行。确定了硬磁颗粒含量为 20wt% ,韧性树脂部分的固化时间为 20 s,柔性树脂部分的固化时间为 15 s等工艺参数,保证后续试验的稳定性。此外,为了提高制造的成功率,需要提高多材料层间和层内连接处的强度。可以通过提高清洁度和选择性能尽可能相近的两种材料,本课题中选择Formlabs的韧性透明树脂和柔性树脂材料,来提高层间连接强度。可以通过增加搭接长度,层间边界交错以及边界膨胀的方式来提高层内连接强度。
为了体现多材料磁场辅助装置具有多材料打印和磁排布的作用,设计并打印了一系列不同结构的单向磁化分布的悬臂梁样品,通过观察它们在同强度匀强磁场下的形变效应,说明在设计多材料磁柔性执行器时,可以采用局部含磁结构。为了体现该装置具有可编程磁排布的能力,设计并打印了具有双向磁化排布的样品。此外,还设计了多足爬行机器人,分析该机器人在磁场下的运动形态,并使多足机器人在旋转磁场下实现向前爬行的动作。设计并打印了具有三维磁排布的立体折叠执行器,在外部磁场作用下,执行器能够实现折叠功能;设计打印了具有三维磁排布的磁柔性夹爪,在操控磁场作用下,可以实现夹取功能。
(1)基于DLP光固化制造原理,结合亥姆霍兹线圈,设计并搭建了一种多材料磁场辅助制造装置。该装置由DLP数字光处理系统、厚度控制系统以及水平换液系统三部分组成。其中换液系统包含了用于磁排布的三维辅助磁场发生装置、普通料槽支架和清洁装置。该制造装置可实现柔性光敏树脂与分布了硬磁颗粒的韧性光敏树脂两种材料的同时打印,并能够在制造过程中实现对材料内硬磁颗粒的实时排布。
(2)设计了多材料磁柔性执行器的磁场辅助制造工艺流程,并编写上位机(PC端)与Arduino单片机控制程序,使多材料磁场辅助制造装置可以按照预期工艺流程实现磁柔性执行器的制造。通过试验以及装置调试,确定了制造过程中的工艺参数。
(3)设计了具有单、双向磁排布的多材料磁柔性执行器简单结构样品,并应用本课题制造设备与工艺流程进行制造。设计并制造了具有二维与三维磁排布的磁柔性执行器,并控制其在操控磁场作用下分别实现其特定功能,验证了多材料磁场辅助制造装置对具有复杂结构与磁化排布的柔性执行器的制造能力。
(1)设计制造了多材料磁场辅助制造装置,其具有产生三维排布磁场,实现材料更换以及固化-清洁功能的切换,实现多层打印的功能。
(2)开发了一种多材料磁柔性执行器的制造工艺流程。
多材料磁场辅助制造装置如图 1 所示,多材料磁场辅助制造的工艺流程如图 2 所示,多材料柔性磁结构的打印如图 3 所示。
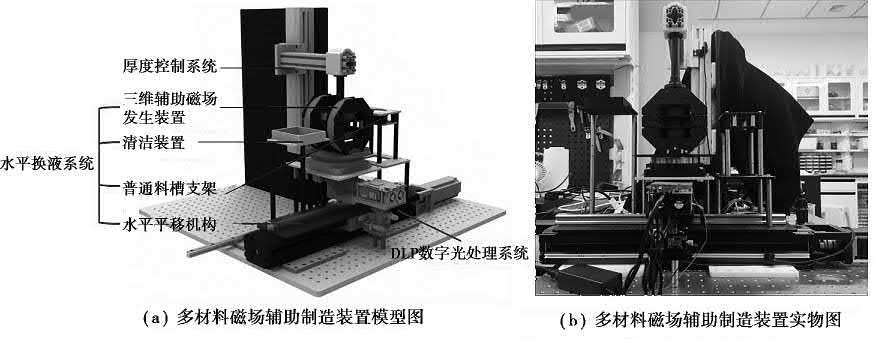
图 1 多材料磁场辅助制造装置
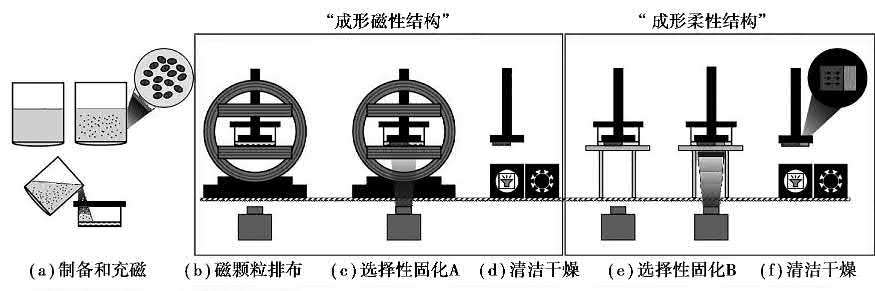
图 2 多材料磁场辅助制造的工艺流程
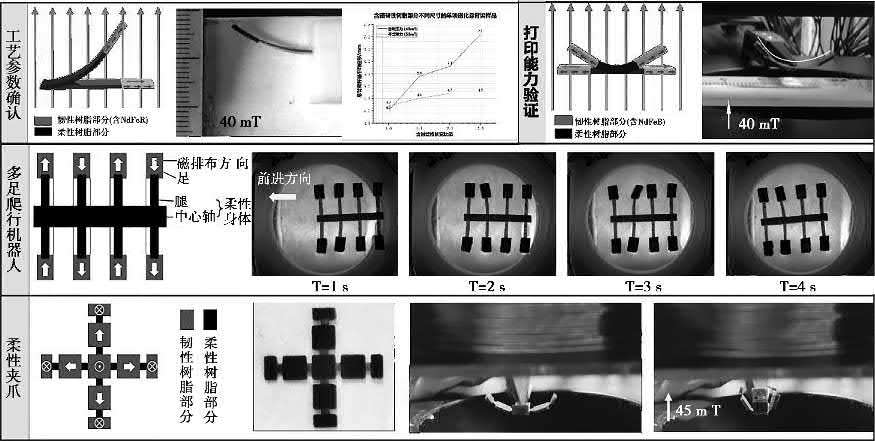
图 3 多材料柔性磁结构的打印
高校指导教师:赵朋;企业指导教师:周宏伟