
下载掌阅APP,畅读海量书库
立即打开



在物理环境下,存在很多的复杂因素,无法对传感器的具体状态进行深入探究;同时,极端环境可能会对机器人或传感器造成不可逆的损害,因此,在物理世界搭建各类极端环境测试移动机器人与测距传感器会带来试验成本过高、不易实现的问题。
基于此,本课题通过对测距传感器的数字孪生建模,保证了在与物理世界相同的环境下对传感器特性进行研究,而且可有效避免传感器的物理损坏,降低研发经济成本;基于数字孪生技术模拟出多种抽象的典型的工厂环境,训练无人车完成路径规划和导航;同时,由于本研究是在Quanser公司的平台下对无人车Qbot3 实现虚拟控制与传感器建模,这也为Quanser的数字教学平台丰富了内容,通过线上即可感受到与现实环境完全相同的传感器工作状态,从而培养学生线上学习的积极性、探索学生自主学习的创新模式和提升自主学习能力;同时提高学校的教学成效,避免学生由于线上教学导致的试验匮乏情况,让学生从课本与实践两个方面丰富知识储备。
本课题采用了理论构建数字孪生模型和应用验证的总体研究思路,在详细而全面地综述传感器数字孪生的国内外研究现状的基础上,从物理世界传感器的特性出发,对物理读数与虚拟读数进行对比分析,并进行数字孪生建模。
本课题首先对传感器的特性进行分析与研究,分析超声测距传感器与红外测距传感器测量不同物体时的读数,并且根据试验数据总结提取传感器特性,设计并完成数字孪生传感器;同时,本课题对试验场景进行规划与设计,对其进行数字孪生建模,使无人车在虚拟与物理环境中有相同的运行环境,在此基础上对无人车移动进行设计,通过改变无人车速度、加速度等数据,使其运行更加流畅。
通过对物理系统的构建取得环境、无人车和传感器等数据信息,并对这些信息进行处理、对比和分析,构建传感器数学模型,最终实现测距传感器数字孪生系统的设计。
基于对超声和红外测距传感器的使用进行了特性测试,完成了数字孪生中物体信息的提取,实现了两种传感器的数字孪生。
首先,通过测量不同距离物体的读数,确定了本次试验传感器的测量量程与测量角度;在传感器测量范围内展开进一步研究,通过改变其与传感器夹角、表面粗糙度与颜色等变量,获得了传感器在测量不同物体时的读数曲线,并对曲线进行了比照分析,得出其各自的波动特点。
其次,结合Simulink程序,通过增添随机数等方式,实现改变物体特性时虚拟曲线也随之变化的目标,并将Simulink与Python程序相结合,将后者检测到的准确数据通过代码发送至Simulink并进行处理,形成与现实传感器相似的波动曲线,完成传感器的数字孪生。
通过物理世界与虚拟世界传感器控制现实与虚拟无人车实现自由移动且不触碰障碍物。首先,结合对无人车移动原理的探究,通过程序设计,调整左中右 3 个传感器的测距阈值、转弯速度等数据,保证其运行平稳的同时实现自由避障。
其次,考虑到现实中工作环境的多样性,选取了工厂或日常生活中常见的物体,将其抽象为大小不一、颜色不同、表面粗糙度有差异的正方体和圆柱体,并且通过Python程序完成虚拟场景的建模,使其与现实场景保持一致,完成了现实与虚拟场景的搭建。随后,在场地中运行无人车,观察对比二者运动路线等数据,验证数字孪生的准确性。
(1)完成了超声测距传感器与红外测距传感器的特性测试,分别研究了两种传感器在测量不同表面颜色、表面粗糙度物体时的读数情况
(2)设计并完成了超声测距传感器与红外测距传感器的数字孪生。根据本论文特性测试结果,设计其数字孪生传感器,使其在测量不同的虚拟物体时,可以呈现与现实相似的读数曲线。
(3)设计了现实与虚拟场景。选取了大小不一、颜色不同、表面粗糙度有差异的典型物件,布置了现实场景,并通过代码使虚拟场景与现实场景保持一致。
(4)实现了无人车行进与避障功能。在实际的现实与虚拟场景中放置无人车,测试了无人车在复杂环境下的运行平稳性与传感器读数相似性,通过测距传感器实现数字孪生系统在移动机器人中的应用验证。
(1)将移动机器人上的测距传感器与数字孪生相结合,为后续更深入研究传感器与无人车相互作用打下基础。
(2)实现了移动机器人在虚拟和现实环境下运行的高度一致性。
设计思路及结果与Qbot3 移动机器人如图 1、图 2 所示。
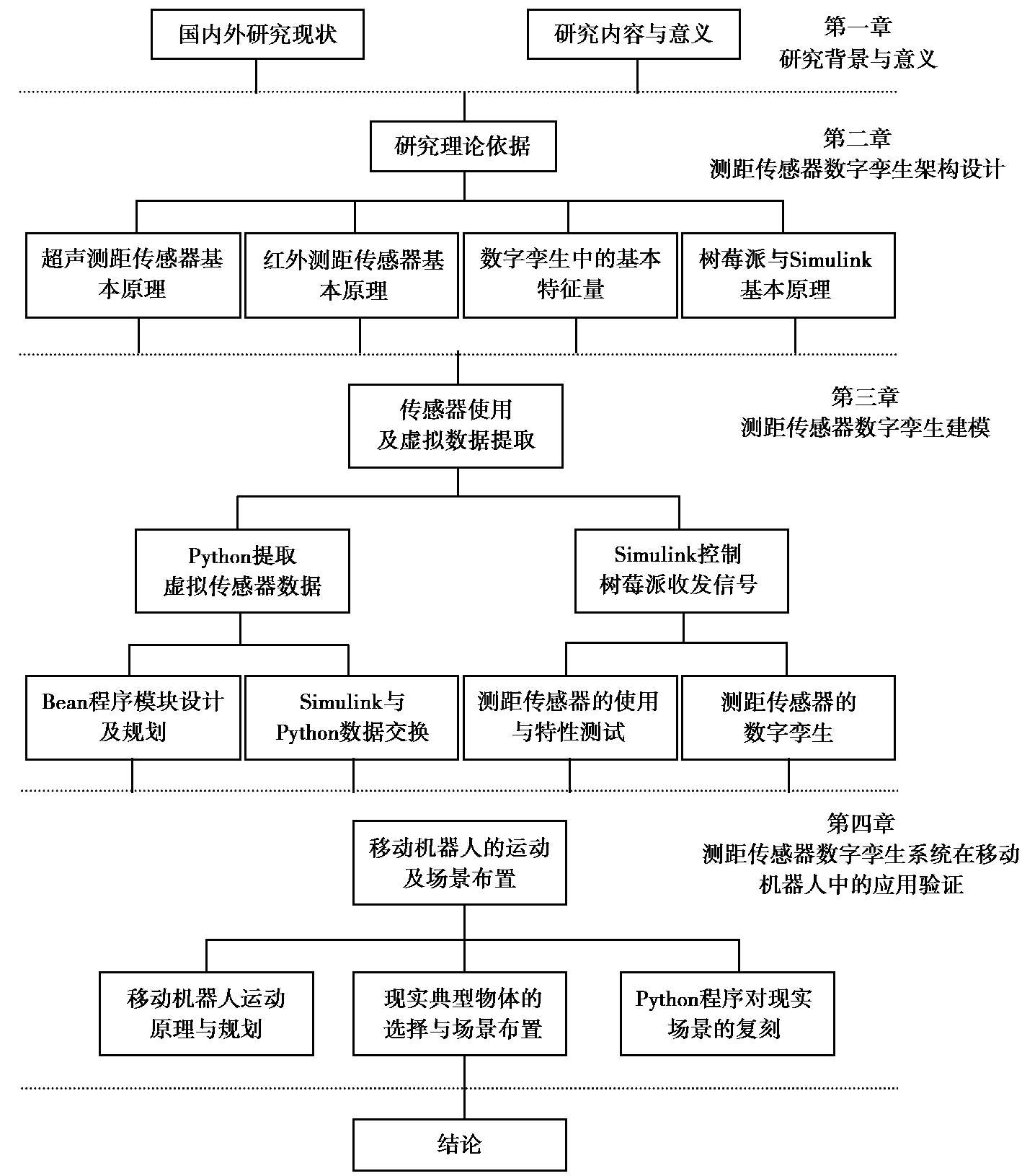
图 1 设计思路及结果

图 2 Qbot3 移动机器人
高校指导教师:孙晶;企业指导教师:王薇、刘欣悦