
下载掌阅APP,畅读海量书库
立即打开



针对不同城市和不同用户群体,高效存储工况片段有多种方案。采用提取关键特征后开展聚类分析寻找典型片段是一种方案,而采用等效能耗的方法重构速度快,可结合云平台实时更新不同城市的工况重构结果,便于定制化仿真分析模型调用。
汽车行驶工况对汽车动力性经济性的设计开发有重要参考意义,不同工况对电动汽车的续驶里程有非常显著的影响。汽车动力系统设计的过程中,需要给定用户的典型工况作为设计的输入。动力系统的匹配效率、汽车能耗的设计均与工况有关。如果工况选择不合理,将会导致匹配工作与实际情况存在较大偏差。在互联网与大数据时代,能够获得海量的客户驾驶工况数据,如何使用一种有效的算法将实际行驶路况数据重构成典型工况,是一个具有重要意义的研究课题。
为了研究不同城市的工况特点,张锐等在《城市道路汽车行驶工况的构建与研究》中使用极大似然估计法与马尔可夫链相结合的方法构建工况,姜平等在《基于小波分析的城市道路行驶工况构建的研究》中采用离散小波变换的多分辨信号分解算法对汽车行驶工况进行构建,石琴等在《基于运动学片段的城市道路行驶工况的研究》中采用主成分分析法对运动学片段进行降维处理,接着利用K均值聚类技术对其进行分类,是一种典型的统计构建道路工况的方法。
随着智能网联汽车技术的发展,收集与统计大量汽车的实际行驶工况变得简单易行,基于大数据分析可以快速逆向生成工况。依据实际道路行驶工况和等效能耗的原则,通过工况重构算法快速精确地生成实际工况近似的等效工况的技术,可应用于智能网联汽车中的个性化动力系统设计与个性化续驶里程预测。
1.汽车实路工况获取
汽车实路工况是指在实际道路上行驶的 t-v 曲线。通常不同城市、不同路段、甚至不同的驾驶员,都有各自独特的实路工况。汽车制造商获取实路工况的方法通常有试验法和用户数据采集方法。随着智能网联汽车技术的发展,结合大数据与人工智能技术,汽车制造商获取工况的主要途径将逐渐由以试验为主转为从用户处获取信息为主。
本节介绍的工况构建算法,在应用上与大数据技术一起完成,但在开发与测试时的数据是通过试验获得。以车型为例,在浙江省桐乡市二环路做耐久试验的过程中使用V-Box采集的 t-v 数据如图2-13所示。
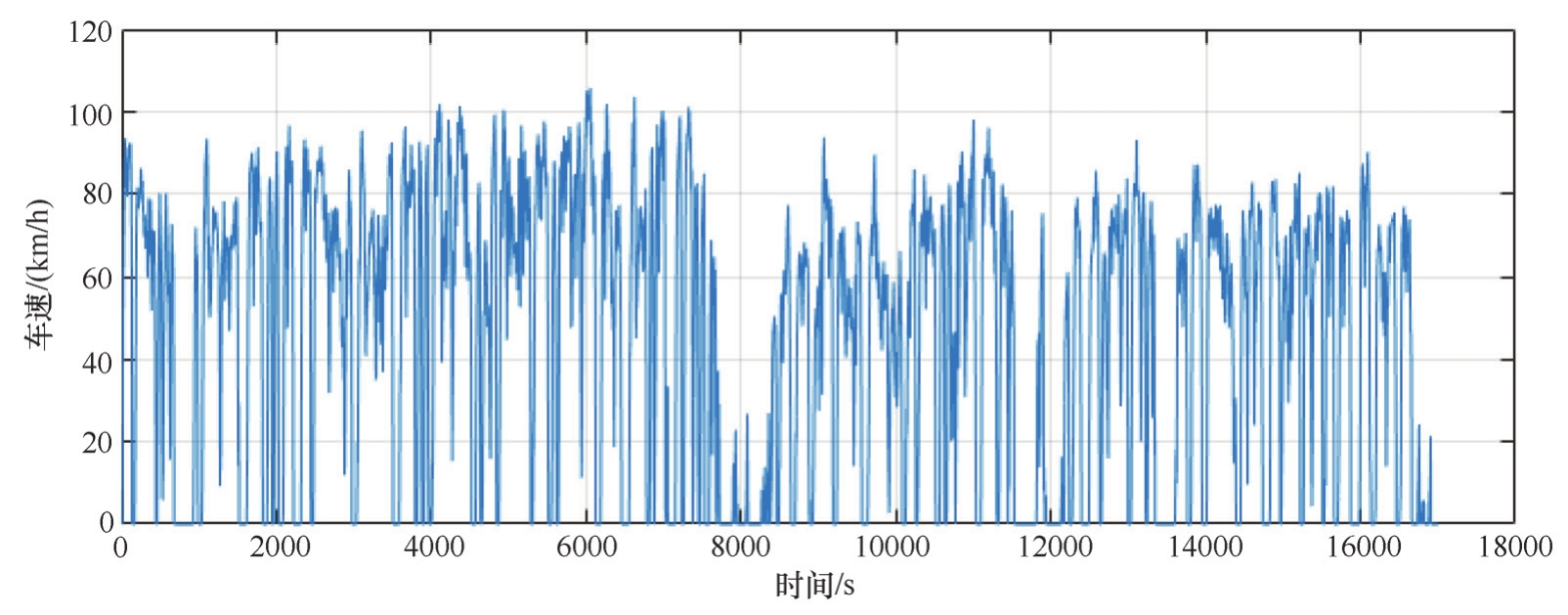
图2-13 浙江省桐乡市二环路工况
2.概率密度谱与工况构建
不同的行驶工况对应汽车不同的能量消耗量,电动汽车的能耗量通常用百公里耗电量来描述。电动汽车的续驶里程及能量消耗量是制约电动汽车发展的关键参数。以汽车行驶实际工况为原始数据的工况重构法的步骤为:首先,根据 v-a 概率密度谱,获取汽车不同车速和加速度在实际工况的分布情况;其次,将工况密度网格化,近似成匀加速、匀减速、匀速等方格区域;接着,使用匀加速、匀减速原理,获取汽车在车速不为0,加速度不为0的情况下各工况的加减速时间矩阵;然后,将概率密度矩阵与减速时间矩阵相除,通过修整与补正原理,获取加减速段的段数;最后,通过修整后的段数矩阵,逆向构建出适合于试验使用的NEDC工况循环。
(1) v-a 概率密度谱
如果车上有加速度传感器,则直接读取加速度传感器的值,可以获得更精确结果。如果没有加速度传感器,则将采集到的 t-v 曲线做滤波处理,滤波处理后再通过数值微分获得加速度 a 。( v , a )点对的分布直接影响电机的工作区域。因此,将该采样中的( v , a )点对做统计分析,得到如图2-14所示的 v-a 概率密度谱。
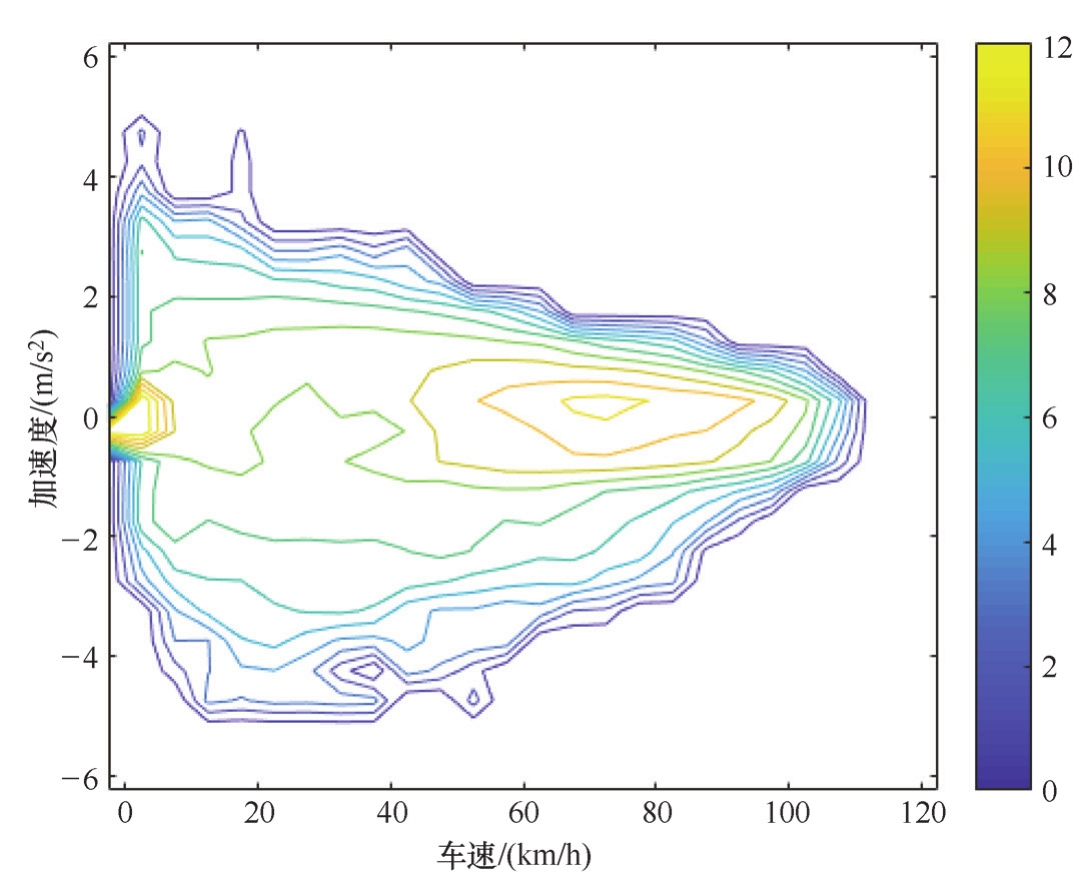
图2-14 v-a 概率密度谱
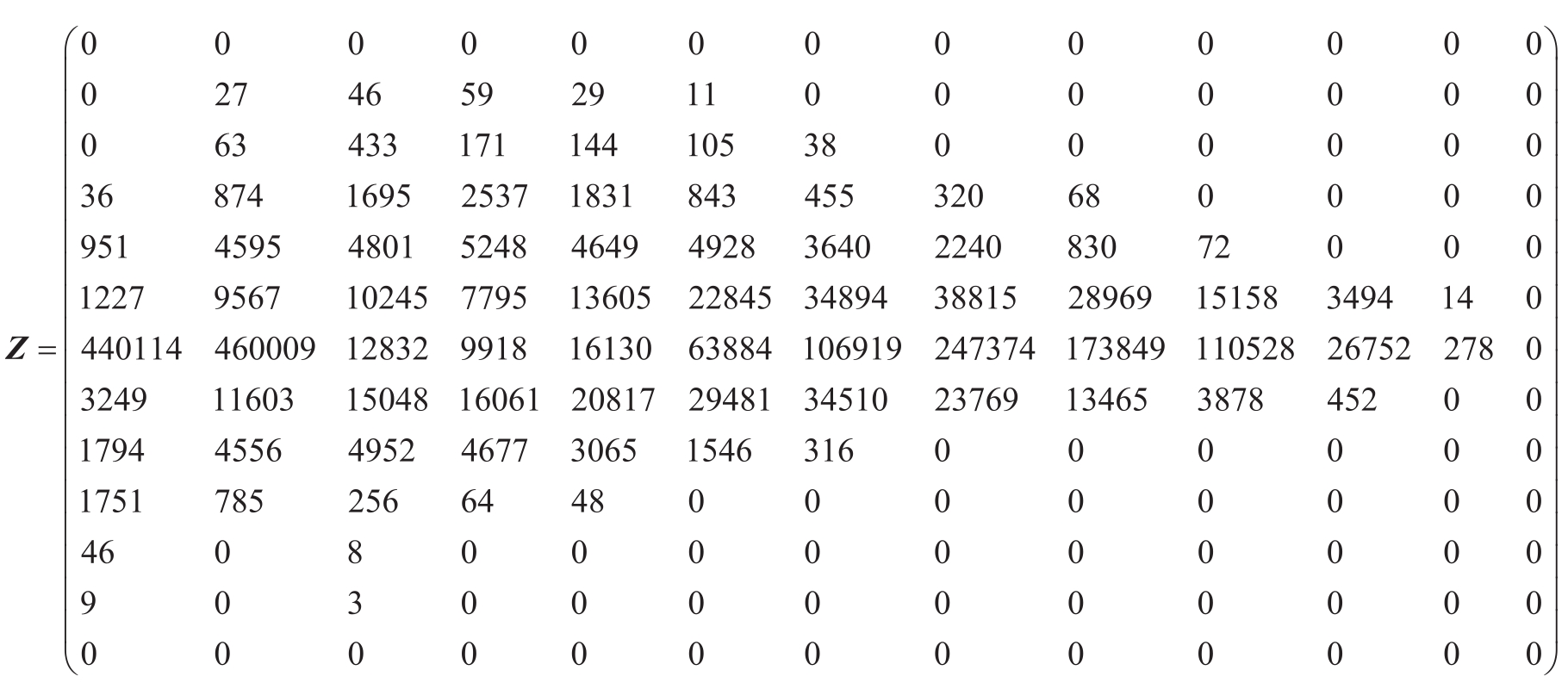
图中,将( v , a )分割为一个矩阵,加速度范围为-6.5~6.5m/s 2 ,速度范围为0~125km/h。速度统计分组间隔为10km/h,加速度统计分组间隔为1m/s 2 ,获得矩阵 Z 。
(2)匀加减速段时间
矩阵 Z 中的各网格 v-a 区间数量即为汽车在该区域的工作时长。如果将汽车的工作状态从网格的左端匀加速运动到右端,则可以计算出经过一次该区域的时间。其中,加速度为0时,其通过时间不使用该方法计算。对于匀速段间隔时间均为10km/h,则该时间仅与加速度相关。各加速度对应的通过时间见表2-11。
表2-11 不同加速度下对应10km/h需要的时间

(3) v-a 段数矩阵构建
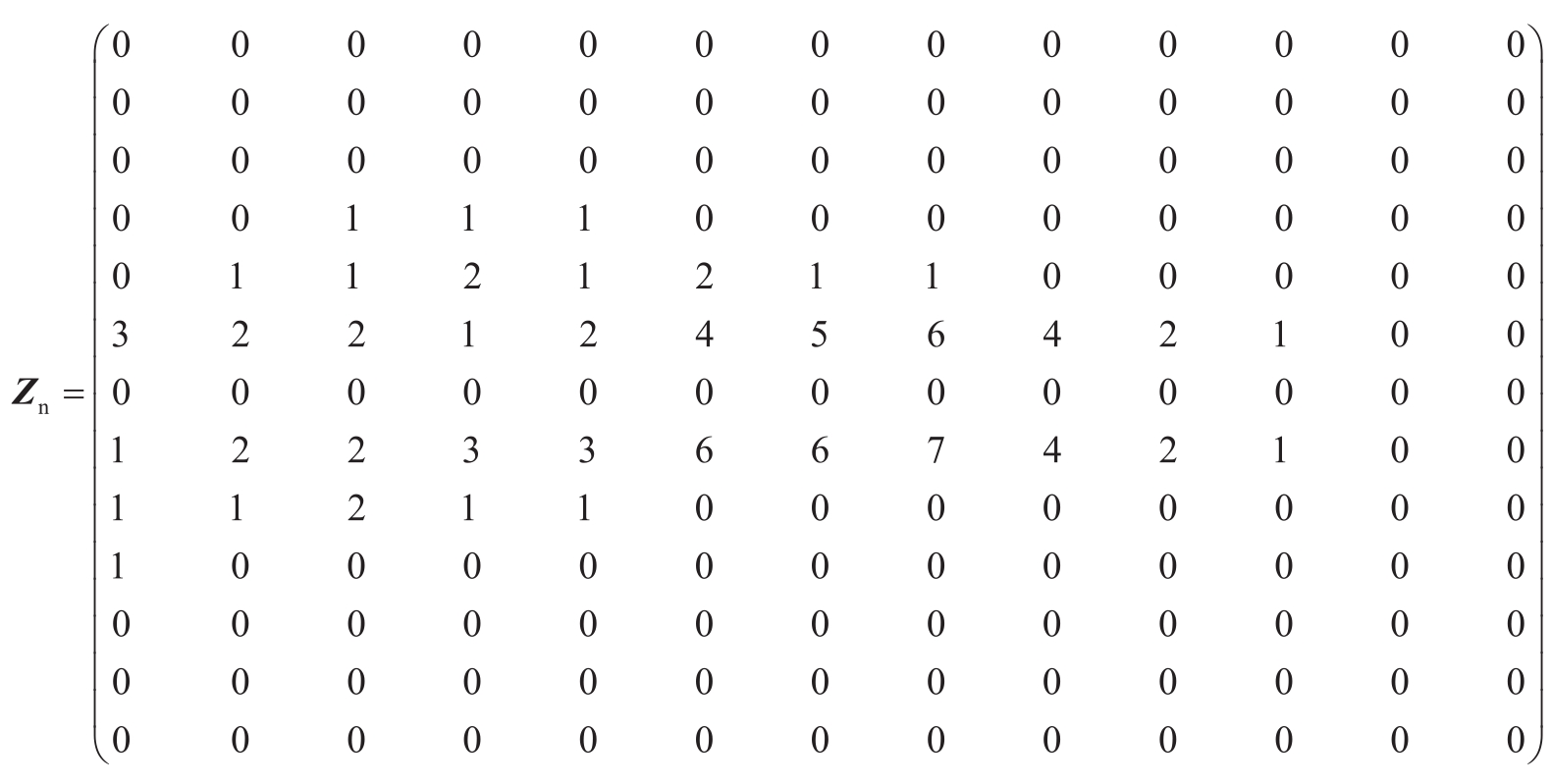
当 v ≠0m/s且 a ≠0m/s 2 时,汽车通过某段区间的总时间除以通过一次该区段所需要的时间,即可获得该区域段数。当 v =0m/s或 a =0m/s 2 时,不可通过分段法获得。计算的段数通过四舍五入,可以获得段数矩阵 Z n 。
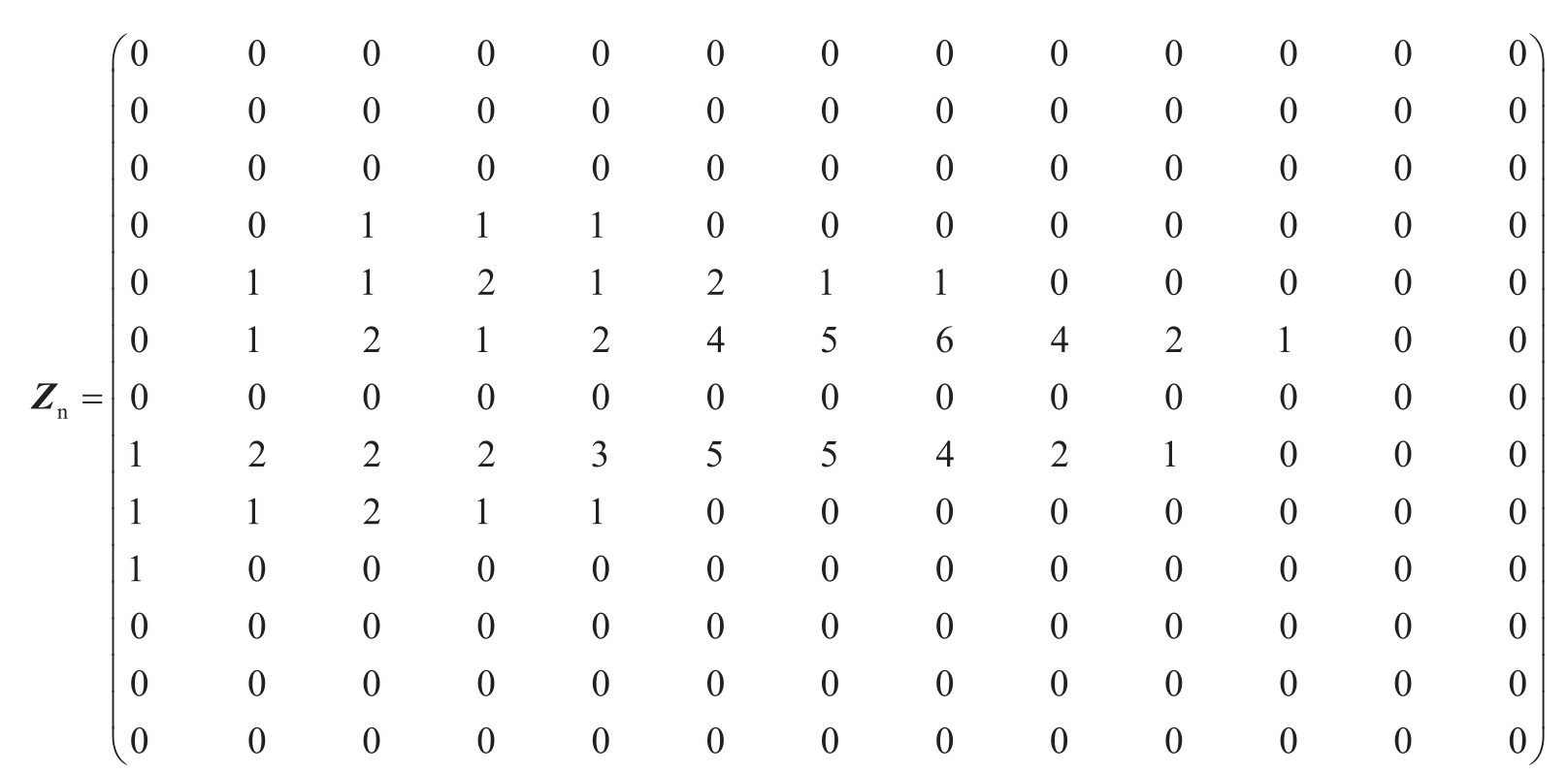
通过矩阵 Z n 构建工况,需要 Z n 矩阵具备如下特点:在每个车速下,均满足 a >0m/s 2 时的段数与 a <0m/s 2 时的段数相等,这样才能构建一起一落的车辆状态。而因为 Z n 是通过四舍五入获取的整数值,因此存在不对称的可能,此时需要将其补对称。通过分布特点可知,认为靠近 a =0m/s 2 处的加速度密度最高,最易被忽略归入匀速段,因此补线段的原则是,在靠近 a =0m/s 2 处补齐。配平后对称的矩阵如下:
(4)基于 v-a 概率密度矩阵的 t-v 曲线重构
一个标准的NEDC工况循环是20min,一个循环是10.9km,对于续驶能力限值达到150km的汽车来说,执行13个完整循环和一个不完整循环,就可以通过测试。而最后一个循环是否能顺利通过最高车速是通过测试的关键,因为其影响标定续驶里程的7.7%。但如果每个循环重构选择时间15min,里程为8.2km,则续驶里程为150km的汽车,将执行18个完整循环和1个不完整循环,此时最后一个不完整循环仅占最终续驶里程的5.6%。将矩阵 Z n 重新构造后,得到如图2-15所示的 t-v 曲线。
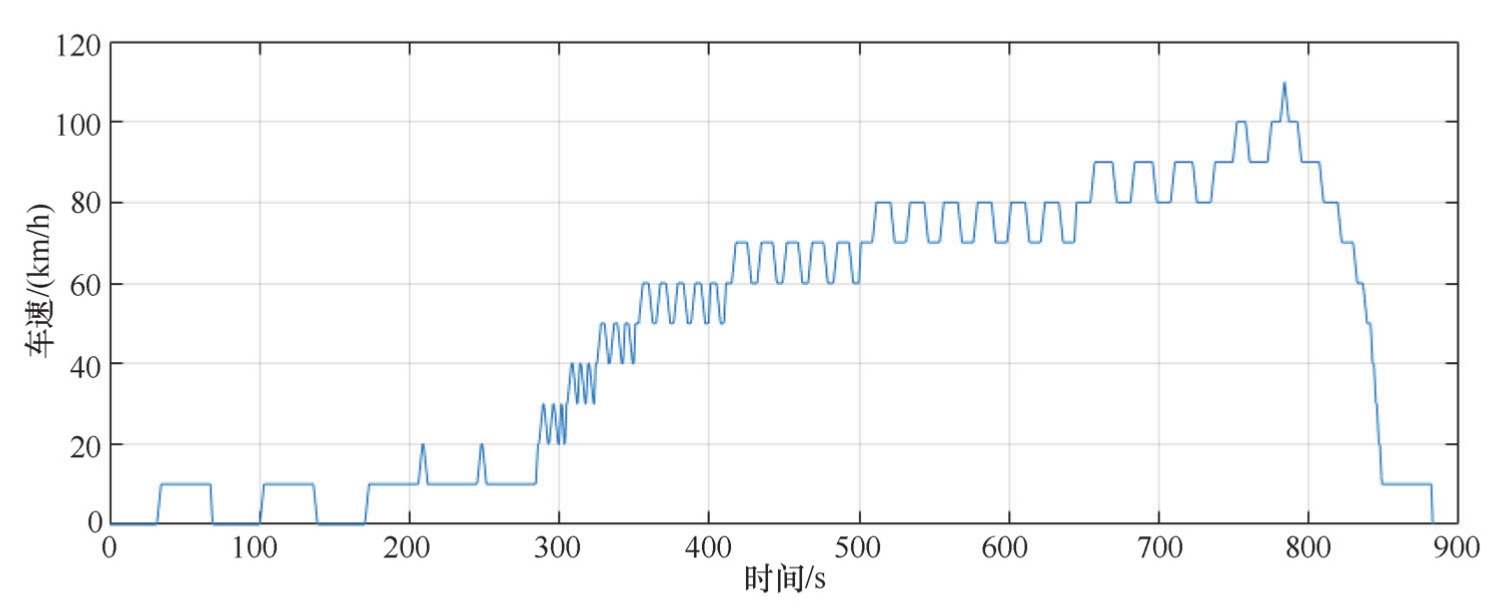
图2-15 t-v 曲线重构结果
3.等效分析
重构的工况与原来相比,是基于概率密度趋于近似而定的。理论上讲,等效工况与重构工况有很多参数是相等的,例如全程平均车速和停车时间占比等,但是最直接描述等效工况与实测工况接近程度的是其能耗指标,这也是判定重构工况质量的最重要指标。
(1)重构工况与实测工况 v-a 轨迹对比
根据实测工况的 t-v 曲线可以构建 v-a 轨迹图,重构工况的轨迹应接近于实测轨迹,如图2-16所示。
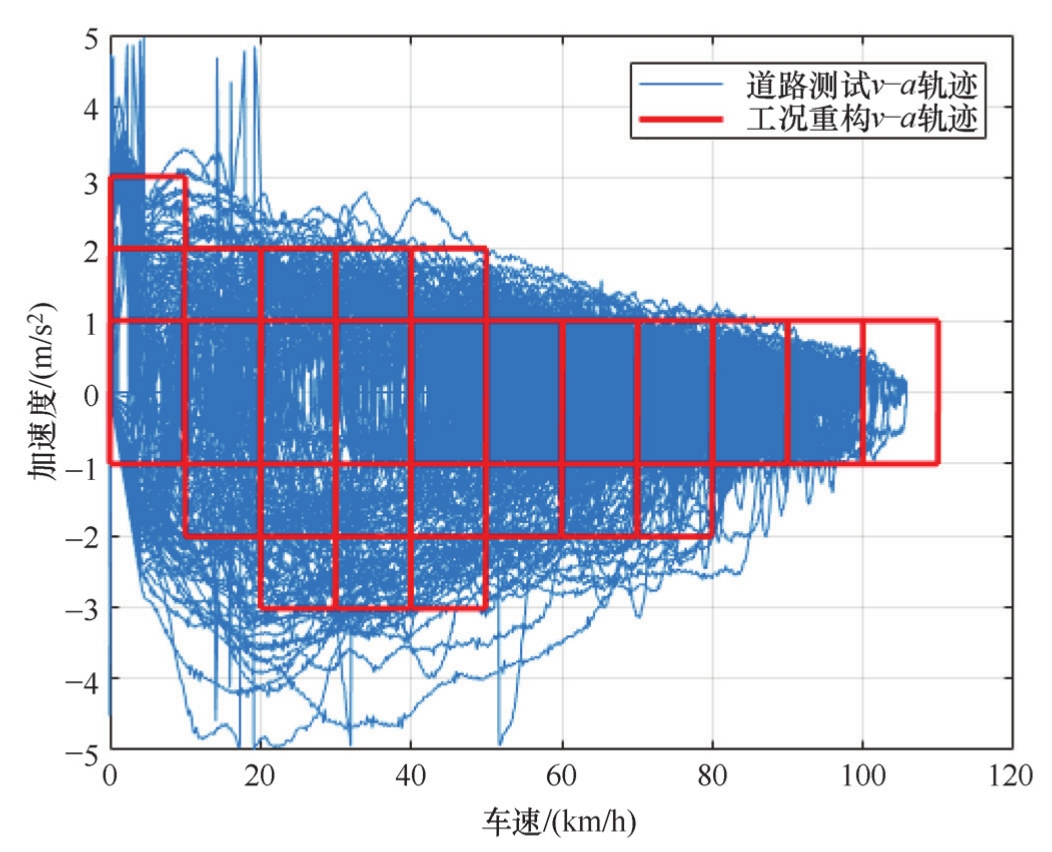
图2-16 实测工况与重构工况 v-a 轨迹对比
(2)重构工况与实测工况能耗对比
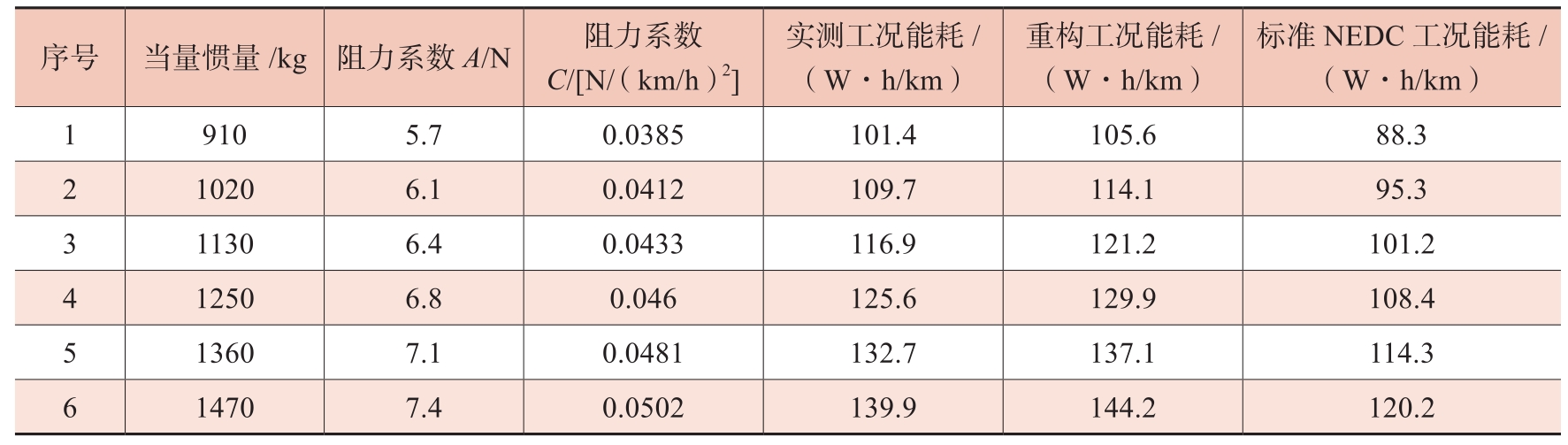
汽车的道路阻力载荷可以使用查表法。这种方法规定了汽车在转毂上测试NEDC工况的轮边能耗。重构工况与实测工况相比,并与实际的NEDC工况相比,其能耗对比数据见表2-12。
由表2-12可知,重构工况与实测工况相比,能耗偏高3%~4%;实测工况与标准NEDC工况相比,标准NEDC工况能耗偏低13%~15%。因此,选用重构工况比选用标准NEDC工况更接近实测工况。可进一步优化重构工况,令其能耗更接近实测工况。
表2-12 不同工况下能耗对比
综上所述,随着地域、驾驶员路线以及驾驶习惯的差异,NEDC工况与大多数精细化需求有较大的脱节。为了适应补贴政策,开发设计阶段并没有依据更详细的分析作为参考。选择一种更为合理的工况具有重要的实际意义,而统一采用一种典型中国工况标准并不是最好的选择。汽车供应商在应对动力系统能耗最优匹配方案的时候,总会面临一个选择,即更好地符合标准工况还是更好地适应用户实际工况。作者建议使用双标准制度,可以选择国家标准工况,亦可选择汽车制造商通过等效能耗法重构的工况。
等效能耗工况重构算法的优点在于:以等效能耗为目标,针对新能源汽车目的性强;使用工况重构,周期选择更为合理;借助互联网大数据技术,可逐步实现为客户定制化最优能耗匹配方案;所重构的工况更利于试验开展。该方法的不足之处有:近似等效法与实际情况差距有待验证;没有考虑换档规律,对换档工况影响有待做进一步分析优化,但对单速比情况无此影响;没有考虑坡度谱,实测中获取道路坡度技术尚不成熟。