
下载掌阅APP,畅读海量书库
立即打开



悬架俯视图几何运动特性主要讨论车辆转弯时内外车轮的转角关系,包括阿克曼转向几何与阿克曼转向机构的理论、阿克曼转向修正和最小转弯直径。阿克曼转向修正是悬架系统设计的指标之一,而最小转弯直径是整车的性能指标。
低速大角度转向时,所有车轮必须围绕着同一中心转动,如图3.41所示。为满足这个要求,前内侧车轮的转角必须大于前外侧车轮的转角。如果转向车轮之间的角度不满足这一关系,会导致轮胎的侧向滑动、磨损和噪声。假定此时侧向加速度接近于零、轮胎纯滚动且无侧偏角,则理想的内外车轮转角表达为
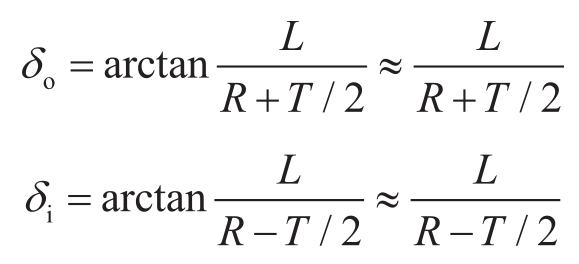
式中, R 为后轴中心点到重心的距离; T 为轮距; L 为轴距。
当 R >> T /2时,内外车轮转角近似相等,此时可以定义阿克曼转向角为:

在给定内侧车轮转角 δ Inner 的情况下,低速保持纯滚动的理想外侧车轮转角 δ OuterIdeal 可以表达为

上述内外侧车轮转角之间的关系需由悬架几何特性来保证。早期的阿克曼转向机构能够近似实现要求的内外轮转角关系。阿克曼转向机构的设计原则是,如果转向机构左右转向梯形臂的延长线交于后轴中心,则内外轮胎转角之间的关系就可以近似满足公式中的关系,从而在转向时实现轮胎无侧向滑动。
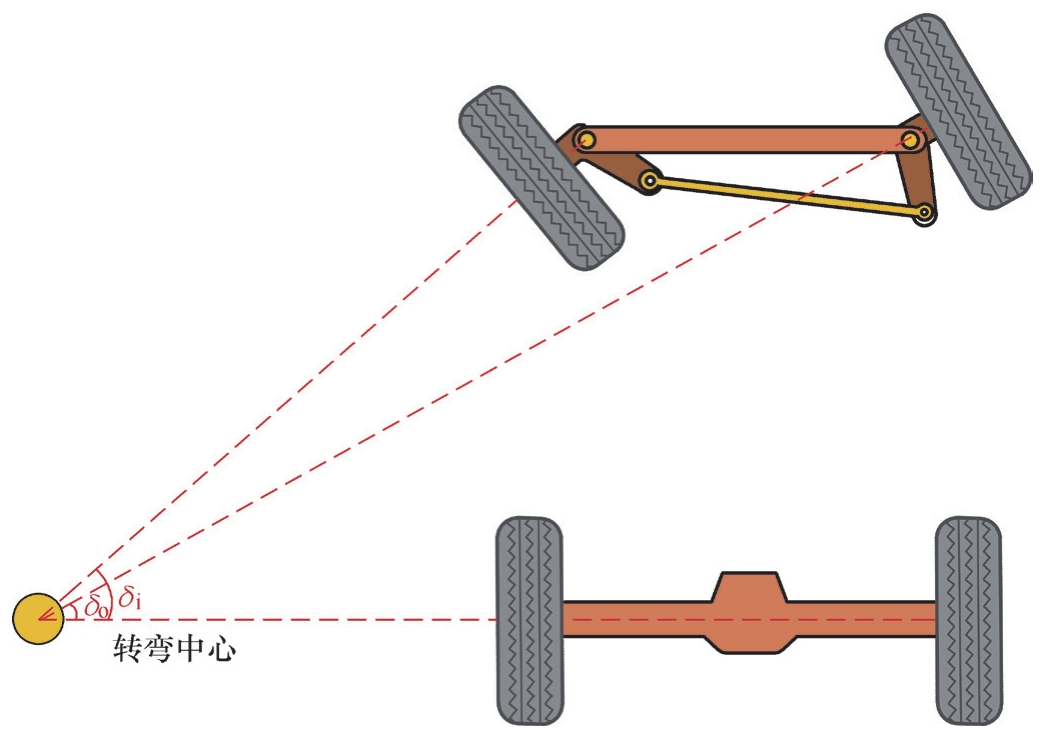
图3.41 低速大角度转向时所有车轮必须围绕着同一中心转动
现代轻型载货汽车和乘用车通常采用齿轮齿条转向机构,转向拉杆既可能布置在轮心前部也有可能布置在轮心后部,内球铰只能横向移动。外球铰的位置受布置的限制,导致转向臂角度和长度不能任意调节,另外内外球铰在纵向上可能不在齿条轴线上,这些与阿克曼转向机构的不同之处都导致内外轮转角通常偏离阿克曼转向几何要求。为量化偏离阿克曼转向几何要求的程度,引入阿克曼修正比的概念,其定义为:将实际外侧车轮转角表示为从平行转向到理想阿克曼几何转向的百分比。如果内外轮转角关系满足阿克曼转向要求,称为100%阿克曼修正比,此时外侧车轮转角为理想转角 δ OuterIdeal ;如果内外转向车轮之间在转向时始终保持平行关系,称为0%阿克曼修正比。内轮转角用于定义转弯中心(即假定为正确),而外轮转角用于定义阿克曼修正比(Ackermann Correction)和阿克曼误差。其中,阿克曼修正比定义为

阿克曼误差定义为外轮实际转角与理想转角之间的差值,外轮的实际转角大于理想转角定义为正误差。阿克曼误差定义为
δ Error = δ Outer -δ OuterIdeal
当阿克曼校正不足时,比如平行转向关系,转弯时外侧轮胎转角大于理想值。此时为了绕同一个中心完成低速转向,内外侧转向轮胎的指向和运动方向不同,会产生方向相反的侧偏角,内侧侧偏角向内,而外侧侧偏角向外(图3.42)。内侧车轮产生向外的侧向力以及由此产生的转向力矩,而外侧车轮产生向内的侧向力以及由此产生的回正力矩,阿克曼校正不足可能导致低速大角度转向时的自转向效应。自转向效应可以用低速行驶时转向盘扭矩表达(图3.43)。理想阿克曼校正情况下,当转向盘角度逐步增大时,转向盘上的反馈力矩逐步增加。此时松开转向盘,车辆可以自回正。当阿克曼校正不足时(以平行转向为例),随着转向盘角度逐步增大,转向盘上的反馈力矩起初增加,但在大转角时反而突然降低。此时松手,转向盘会被“吸入限位”,即车辆自动转向,转向盘不能自回正。这是因为在车轮大转向角情况下,外轮的后倾拖距随着转向角增加而减小,回正力矩因此减小,内轮的后倾拖矩随着转向角增大而增大,转向力矩因此增加。考虑所有回正因素之后的总回正力矩可能变为负值。增加阿克曼校正比可以减少自转向趋势。高速行驶时,一般不会有很大的车轮转角,由侧向力产生的回正力矩占主导地位,因此通常不会出现自转向。
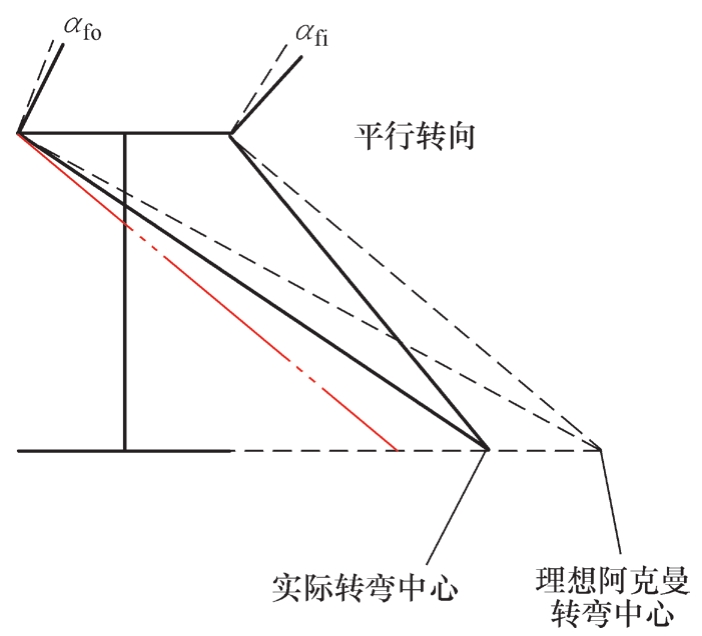
图3.42 低速行驶时阿克曼校正不足(以平行转向为例)引起内侧车轮产生向内的侧偏角而外侧车轮产生向外的侧偏角
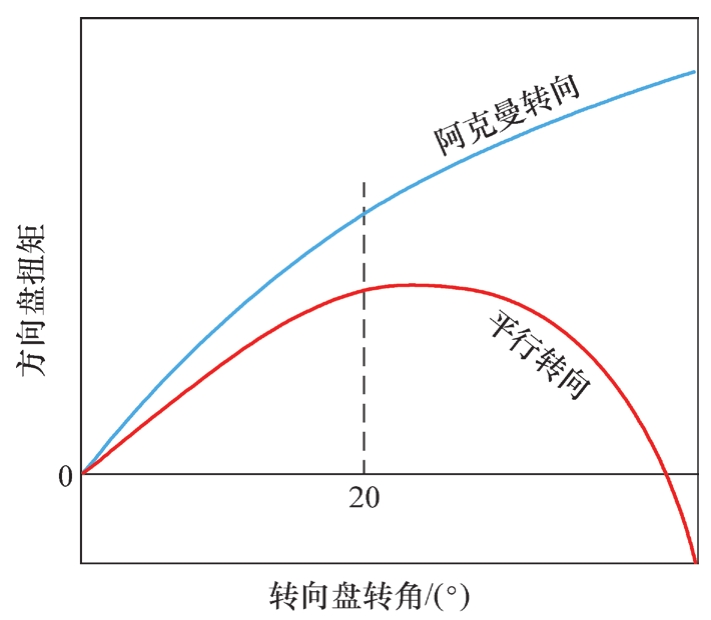
图3.43 阿克曼校正不足时(以平行转向为例)大角度转向下转向盘可能会被“吸入限位”,引起自转向
在一般行驶速度下转弯,所有车轮都产生侧偏角,转弯中心从后轴延长线前移,围绕同一圆心转弯必然导致理想的阿克曼转向几何情况下,内胎比外胎侧滑更多,达到最大侧向力的时间更早(图3.44)。因为两侧轮胎不能同时达到最大侧向力,降低了前轴的极限转弯能力。设定为阿克曼校正不足时,可实现更平衡的内外侧轮胎侧偏角,最大化前轴转弯能力,或者提高轮胎开始尖叫的转弯速度。基于这个原因,通常运动车采用较低的阿克曼校正(阿克曼修正比远小于100%)。另外相比于阿克曼校正不足,100%阿克曼修正比对应的转弯直径更大,因此设计中通常不采用100%阿克曼修正比。
当阿克曼校正不足时,在同样内侧车轮转角下外侧车轮转角更大,因此转弯直径变小。或者如果保持原来转弯直径,可以减小内侧车轮最大转向角度,以减小轮胎包络。如果阿克曼修正比大于100%,称为阿克曼转向几何的过校正。此时,外轮转角低于理想的转向角度,内外侧轮胎的侧滑类似于直行时过度负前束,因此会导致轮胎内肩磨损,同时转弯直径增加。这种情况应该避免。
阿克曼修正比是悬架设计的关键指标之一,阿克曼校正的目标值取决于具体车型定位(比如运动车或乘用车),也取决于悬架转向系统布置局限和转向系统受力情况。一般运动车取较低的目标值(如低于50%),以便提升最大侧向加速度;普通乘用车采用较高的值(如60%~90%),以减小低速大角度转向时的轮胎磨损和自转向效应。阿克曼校正适用的范围如图3.45所示。
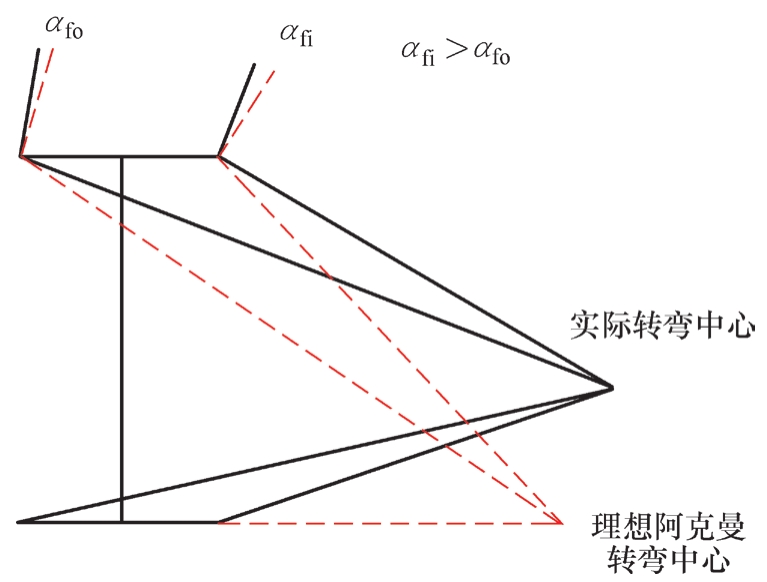
图3.44 在理想阿克曼校正且一般行驶速度条件下,内胎比外胎侧滑更多,降低了前轴的极限转弯能力
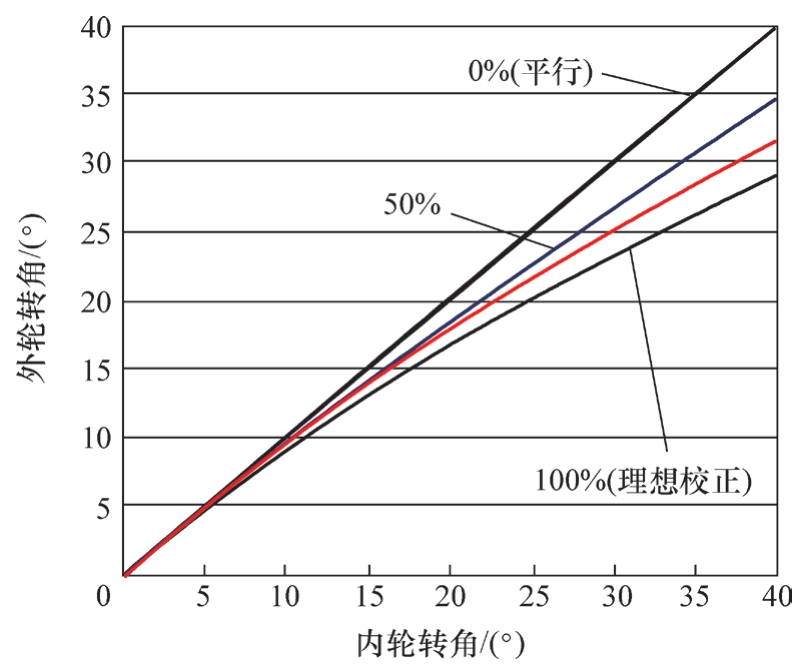
图3.45 合理的阿克曼修正比范围
最小转弯直径是最主要的整车指标之一,与以下参数有关:轴距、轮距、主轴长度、轮胎直径、轮胎截面宽度和前轴内外轮转角关系(由转向几何确定)。对于采用前轮转向的车辆,采用短轴距、窄轮距、短主轴长度和窄轮胎截面宽度,以及增加车轮的最大转向角 δ fmax ,可以有效减小转弯直径。对四轮转向车辆,影响参数还包括由控制算法确定的最大后轮转向角 δ rmax ,简化的最小转弯直径可以表达为式(3.11)。假定其他参数不变,后轮的反向转向角可有效减小最小转弯直径,如图3.46所示,后轮5°的反向转向角可以将最小转弯直径减小1m。

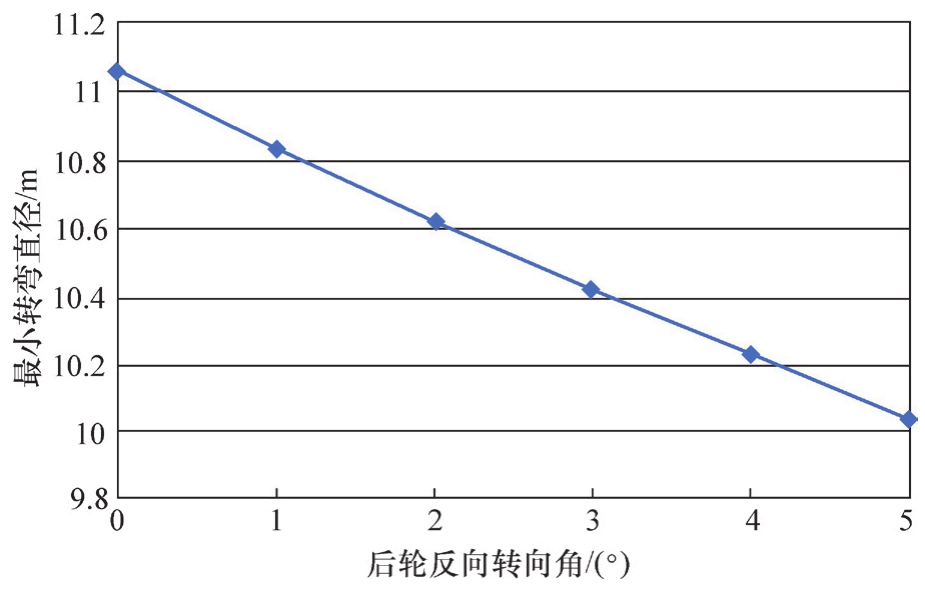
图3.46 四轮转向车辆最小转弯直径与后轮的反向转向角的关系
根据第3.5.2小节的分析,阿克曼转向校正不足可以降低最小转弯直径。假定最大内轮转角不变,由转向机构确定的外侧车轮转角决定了阿克曼转向修正比。同时考虑内外侧轮胎转角用来估计最小转弯直径。图3.47所示为阿克曼转向修正比与最小转弯直径的关系。可见,阿克曼转向校正不足确实会带来最小转弯直径的减小,当然太低的阿克曼转向修正比也会带来轮胎过度磨损和可能的自转向。
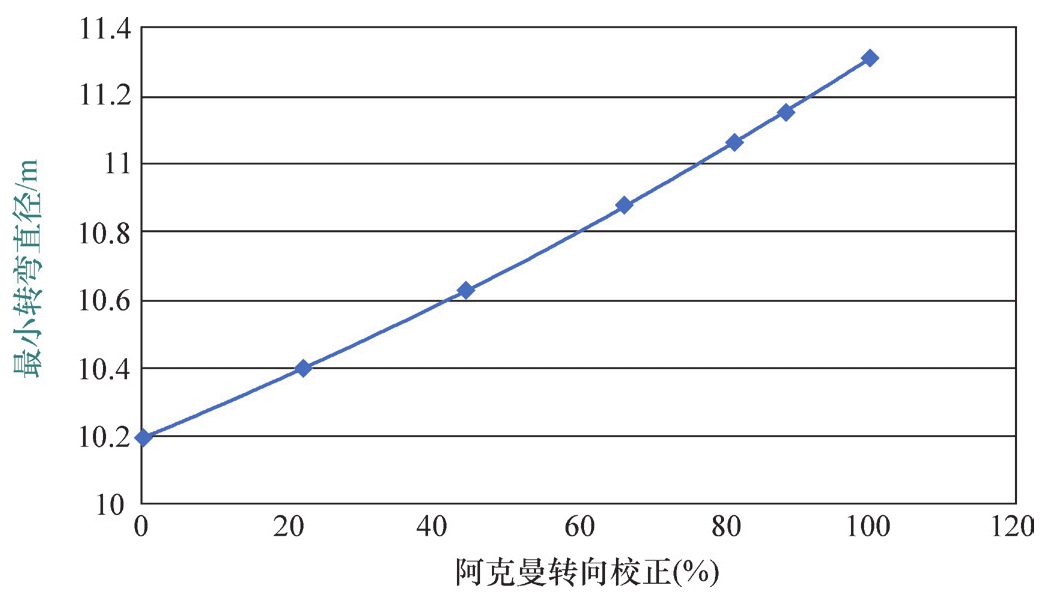
图3.47 阿克曼转向修正比与最小转弯直径的关系