下载掌阅APP,畅读海量书库
立即打开



常导高速磁浮交通对于轨道的容许变形及控制误差有着严格的要求。在上海磁浮线设计时,轨道梁竖向一阶固有频率按下列要求加以控制:
式中 v ——行车速度(m/s);
L ——一阶固有频率单波距离(m)。
此外,高速磁浮还对轨道功能区定子面、滑行面和侧向导向面提出了几何公差和偏差要求,包括长波偏差、短波偏差、功能面不平顺度和错位、偏转等允许公差和偏差要求。各功能面及测点位置如图2-15所示。
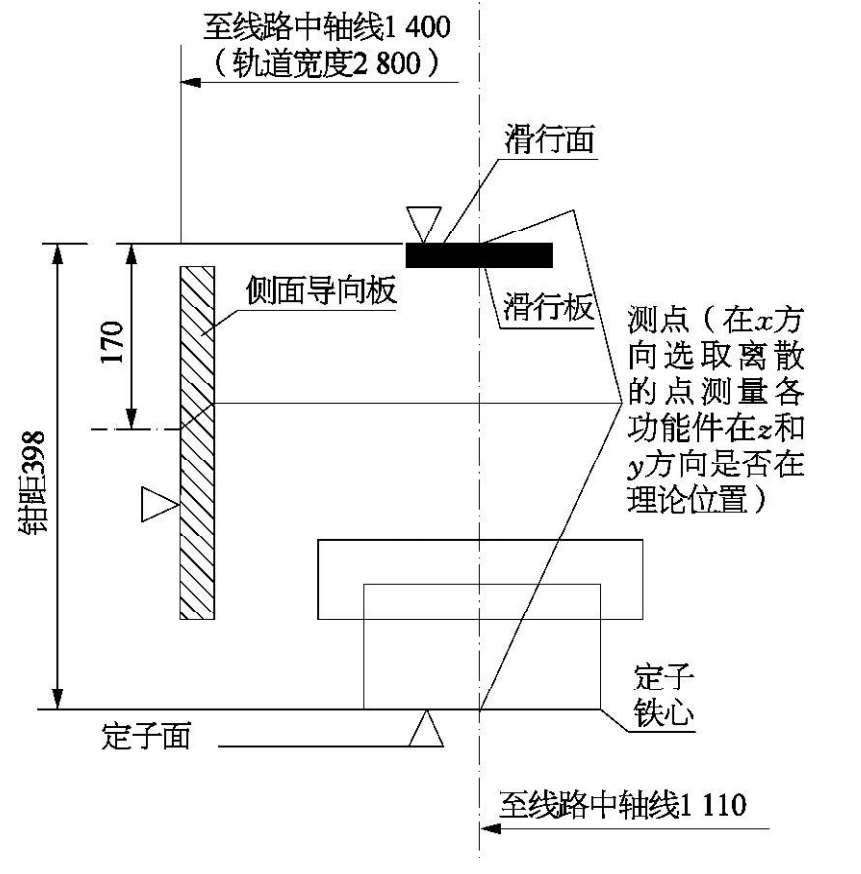
图2-15 各功能面及测点位置
各功能面的长波偏差是拟合位置与理论位置比较的差值,短波偏差是拟合位置与实测位置比较的差值。通过控制长波偏差和短波偏差,保证实测值、拟合曲线值、理论位置之间的差值在一定范围之内。功能面的不平顺度则定义为每米长的功能面相对于相邻的每米长功能面的倾斜度的变化值,用以控制各功能面的平顺变化。
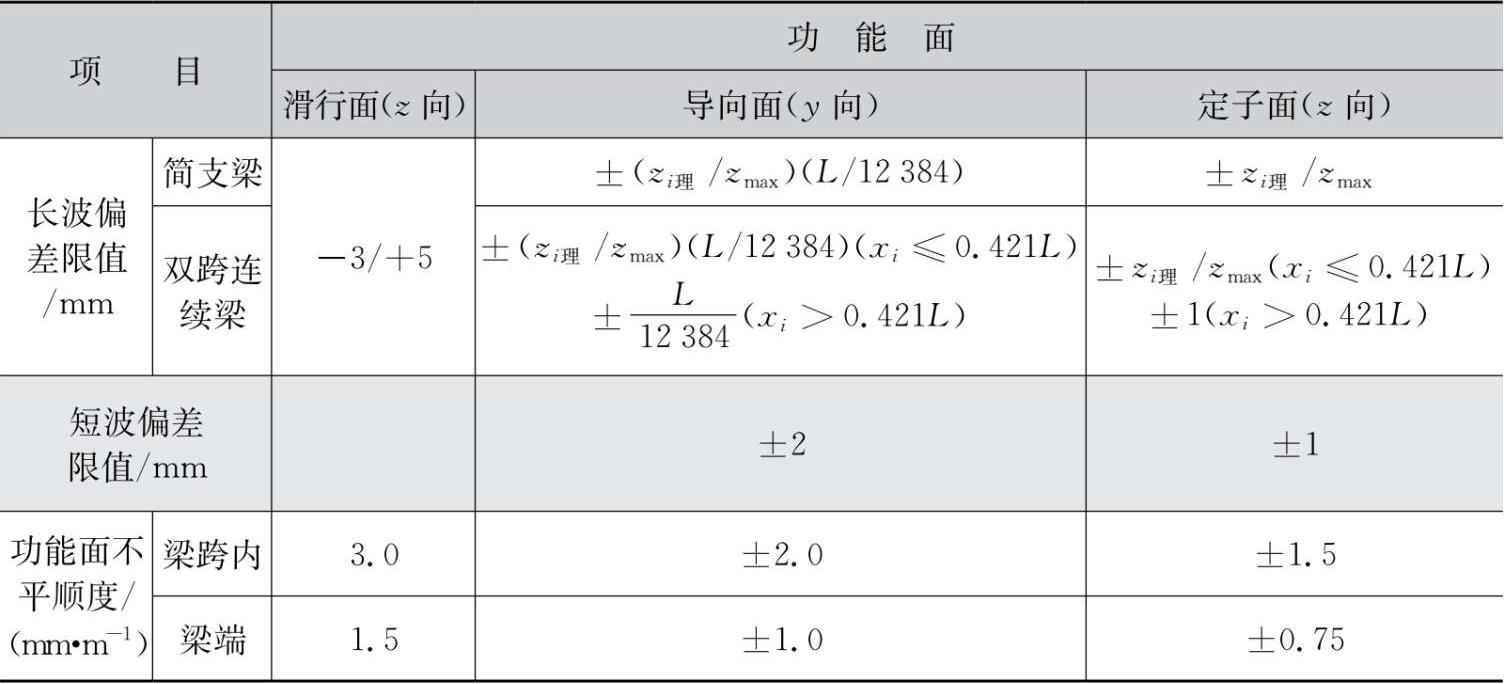
各功能面长波偏差、短波偏差、功能面不平顺度(图2-16)的允许公差满足表2-13要求。
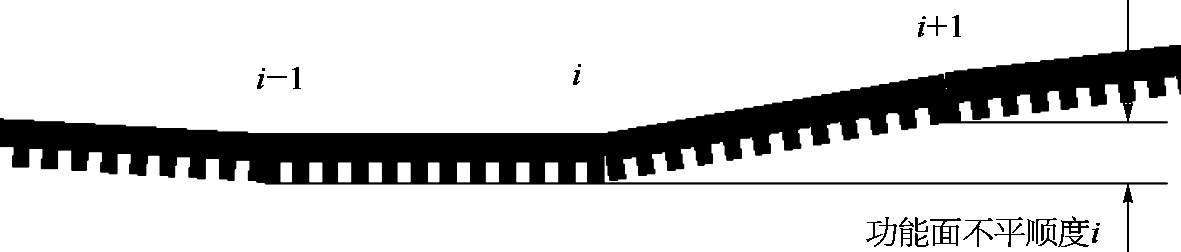
图2-16 功能面不平顺度
表2-13 线路长、短波偏差和功能面不平顺度的限值
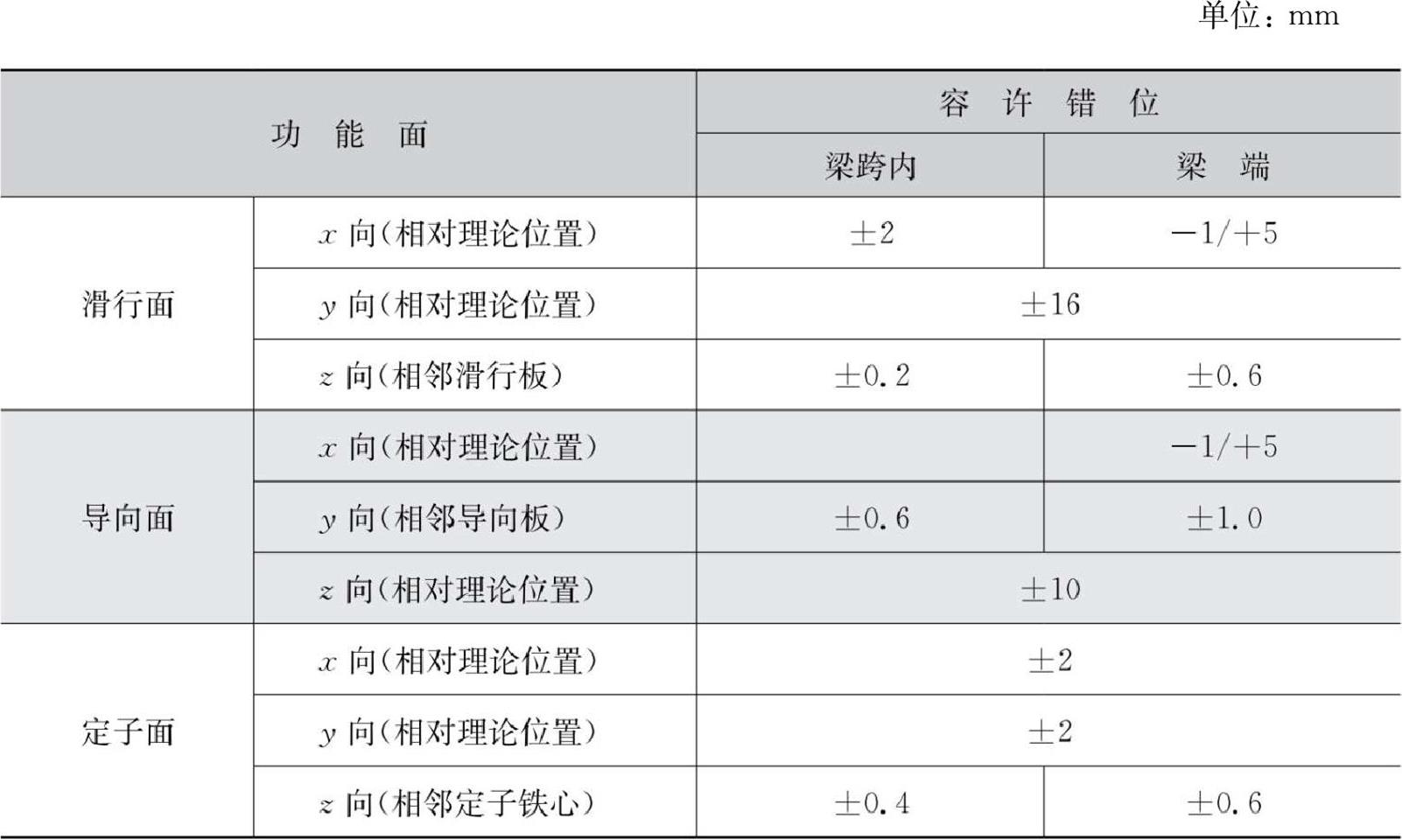
各功能面的错位不得大于表2-14所列数值。
表2-14 各功能面容许错位
各功能面的允许偏转值不得大于表2-15所列数值。
各功能面纵向间隙的公差应满足表2-16所列要求。
轨道宽度公差不得大于表2-17所列数值。
钳距公差满足表2-18所列限值范围。
表2-15 各功能面允许偏转值Δ α
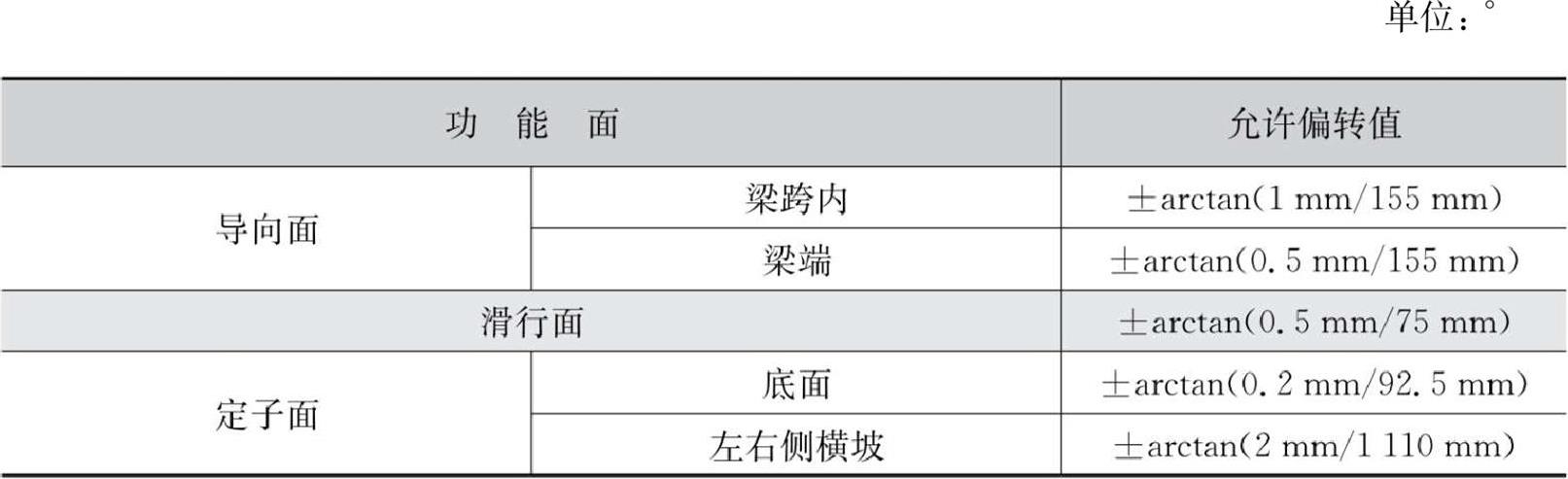
表2-16 功能面纵向间隙的公差
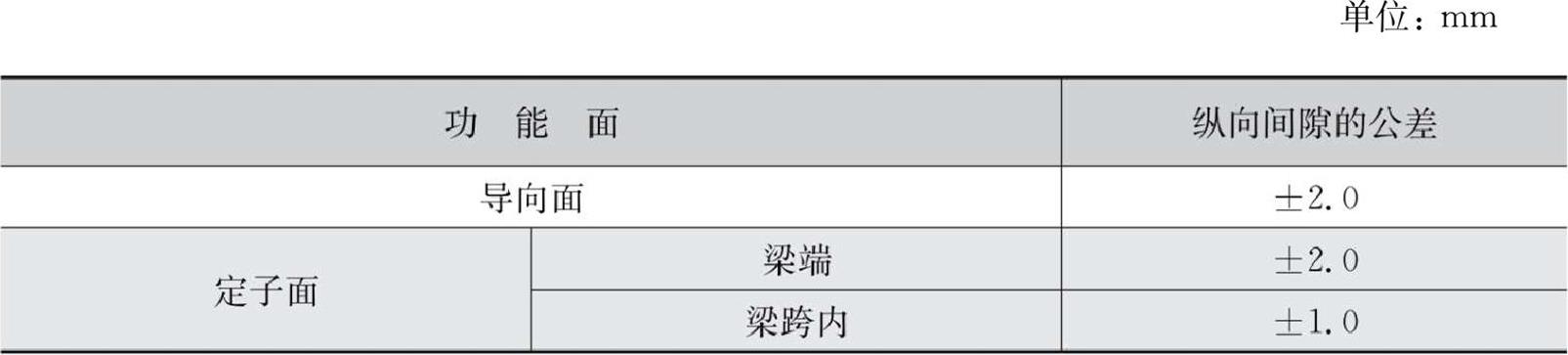
表2-17 轨道宽度公差Δ s

表2-18 钳距公差Δ t ZM