
下载掌阅APP,畅读海量书库
立即打开



人们在很早的时候就认识到了飞行的重要性,从中国古代的“竹蜻蜓”(通过一根主轴连接着多个竹片的飞行玩具,利用风力可将玩具送上天空),到明代发明家万户的失败飞行实验,再到莱特兄弟发明了第一架飞机,人类为了实现自由飞行,付出了巨大的努力。随着科学技术的进步,为了完成更加精密的飞行任务,大型飞机已经无法满足当前的需要。飞行器小型化成为近几十年来学术界与工业界的技术潮流,因此小型化的无人机开始走向人类社会舞台。本节从无人机类型、无人机控制与集群、无人机通信及其标准化、无人机通信网络与技术优势等方面介绍无人机系统,帮助读者初步了解无人机的先进性,为有志于从事无人机技术研究的读者奠定坚实的基础。
无人驾驶飞机的另一个广为人知的名称是无人机(Unmanned Aerial Vehicle, UAV)。顾名思义,也就是不需要飞行员操控的轻量型飞机。无人机可以利用机载芯片,通过实时读取配备在无人机上的设备(如陀螺仪、导航系统等)数据,来控制并调整自身的速度、加速度、角速度、飞行方向等参数,从而达到操控自身的目的。一般来说,一个完整的无人机系统,包含机架、动力系统、任务导航系统、自动驾驶仪器、完整通信链路以及地面控制台等装置。与一般飞机需要人为操控不同,无人机既可以由机载芯片根据外界环境的实时变化来操控飞行,也可以由地面基站远程控制。无人机主要用于军事领域或者特殊民事领域,如搜索救援、地形探测、环境植保等。
无人机通常可分为固定翼无人机和多旋翼无人机 [2] ,如图1-3所示。固定翼无人机的机翼位置基本保持不变,图1-3(a)所示,该类型的无人机利用了民航飞机与军用飞机的设计思想,在其中配备了推力系统。该推力系统可在固定翼无人机的飞行方向产生前向推力,进而根据固定翼无人机表面产生的压强差产生一个能够稳恒上升的升力,以抵消固定翼无人机的重力。一般来说,为了实现固定翼无人机的匀速上升,需要固定翼无人机保持一定的飞行速度。与传统的直升机相比,固定翼无人机结构更加简单、飞行距离更长、能耗更低、续航性能更加优良。固定翼无人机在起飞或者降落时,需要在地面设置一定长度的跑道,以便使其能够更加稳定地起飞或降落。
与固定翼无人机相比,多旋翼无人机在起飞或降落时无须跑道,它的升力不是由飞行时的前向速度决定的,而是由各个旋翼的不同旋转方向产生的力矩来实现上升或下降的,上升或下降的速度由各个旋翼在不同旋转方向上的力矩决定。多旋翼无人机如图1-3(b)所示,该无人机通常有十分完美的对称性(特别是四旋翼、六旋翼或者八旋翼无人机),各旋翼之间的反扭矩可以互相抵消 [2] 。
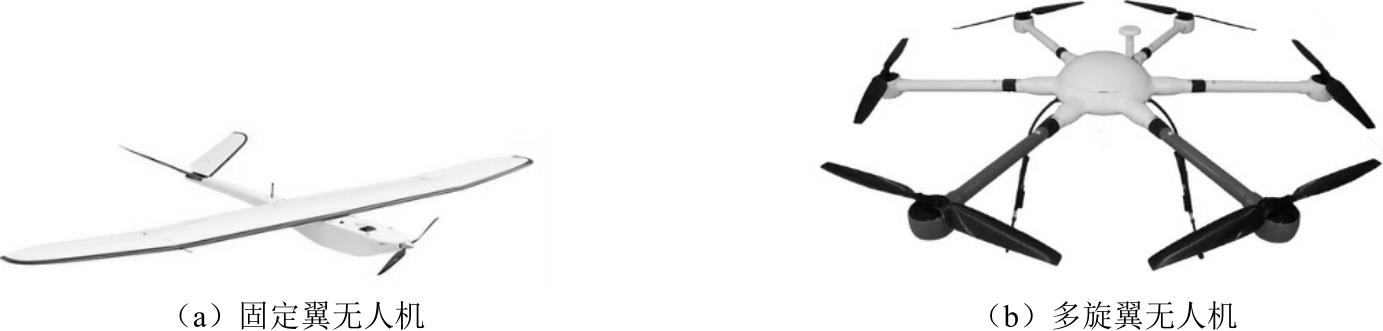
图1-3 无人机类型
多旋翼无人机由多个旋翼的共同作用产生升力、俯仰力矩、滚转力矩和偏航力矩,如图1-4所示。多旋翼无人机通过底部的电动机来控制旋翼的转速,通过控制旋翼及其转速来控制飞行方向和速度,从而间接控制升力和各种力矩。根据刚体力学原理可知,升力和力矩可以直接平移到刚体(即此处的多旋翼无人机机身)的对称轴上。随着升力和力矩的改变,多旋翼无人机的姿态和位置就可以得到实时控制和调整。在多旋翼无人机悬停时,旋翼产生的升力平衡了多旋翼无人机的重力,多个旋翼彼此之间的升力相同,使多旋翼无人机的力矩向量和为0。文献[3]研究了如何通过联合估计无人机的位置-姿态,实现了灵活的无人机点对点通信,为无人机联合控制位置和姿态提供了有力论据。文献[4]研究了多旋翼无人机中悬停场景下的高能效通信问题。
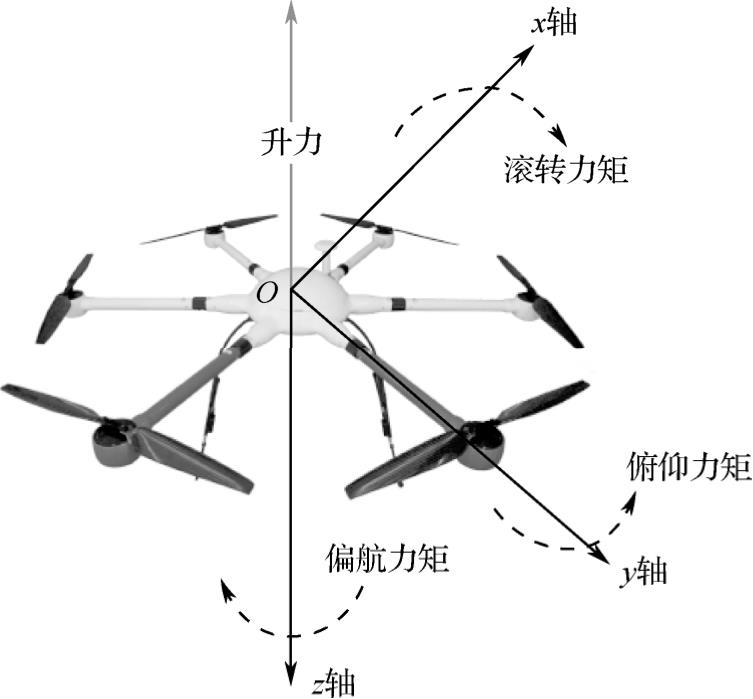
图1-4 多旋翼无人机的升力和不同力矩示意图
无人机的通信性能可以从以下几个方面来进行评估。
(1)易用性。易用性是指学习操纵小型无人机(固定翼或者多旋翼无人机)实现悬停、自适应姿态前向飞行的难易度。多旋翼无人机的遥控十分简单,它可以灵活自如地垂直起降,并且可以以较小的能耗来实现长时间的悬停。多旋翼无人机可以灵活地实现前、后、左、右、上、下和偏航等飞行 [2] 。另外,多旋翼无人机的操控比较简单,可以通过编程来灵活地控制飞行参数。固定翼无人机需要在较大的区域中飞行,其悬停操作会耗费大量的能量,地面控制台需要不断地检查固定翼无人机的飞行状态以防止其坠机。
(2)通信可靠性。通信可靠性可通过无人机之间的信令传递时延来评估,该时延的大小通常是由无人机通信网络芯片的精密程度决定的。从硬件设备来看,固定翼无人机需要更精密的内部设备与程序来协同驱动其飞行,当固定翼无人机组成无人机通信网络时,从发送端到接收端的信令传递可能比内部硬件的信令传递更快,信令能够被固定翼无人机的核心计算机迅速收集并处理。对于多旋翼无人机而言,内部更为简单的构造增加了信令传递的处理时延,其内部信令传递时延更大,其通信可靠性相对固定翼无人机的通信可靠性而言较弱 [3,5] 。
(3)可维护性。可维护性是指当无人机发生故障时,其机架、外设、内部芯片和组装等部件按照说明书的操作是否能在规定时间内及时恢复到正常状态。多旋翼无人机更容易维护,其结构比固定翼无人机简单。例如,固定翼无人机需要一定数量的连接杆作为活动关节,在飞行时会产生一定的空气摩擦损耗;而多旋翼无人机没有这种关节,采用的是更为简单的无刷直流电机 [2] ,在飞行时受到空气摩擦损耗的影响非常小。另外,多旋翼无人机的电机、控制系统、电池、旋翼和机架在损坏时非常容易更换,操作员自行联系商家购买相应的部件,按照说明书就可以进行安装;而固定翼无人机的零件较多,内部设备更为复杂,当固定翼无人机的部件损坏时,通常只能联系厂家进行维修。
(4)通信链路持续性。由于无人机的高动态特性,其信道状态经常会发生剧烈的变化。无人机在利用自身通信资源(如天线、载频、基带、射频链路等)维持高效通信链路时的代价,通常以建立并维持无人机通信链路的开销或者信息传输时延来衡量 [3-6] 。建立并维持无人机通信链路的开销通常由空中无人机通信的信道状态信息(Channel State Information, CSI)决定。无人机在快速飞行时,网络内部的无人机节点之间的信道会发生时断时续的现象,其飞行姿态的变动也会使无人机链路通信质量下降。一般来说,无人机可以在给定的最大链路建立开销下,通过自身通信资源,利用启发式搜索算法,建立并维持一个满足一定服务质量(Quality of Service, QoS)的通信链路 [3,5] 。一般来说,虽然固定翼无人机的内部结构复杂,但其配备的通信资源比多旋翼无人机更加精良,性能也更加优异。在高速飞行的场景下,固定翼无人机的通信链路持续性更高 [6] 。
(5)续航性与可承载性。续航性与可承载性是指无人机在给定电池能量和任务下的最大飞行时间与最大载重量。
上述五个方面也是无人机通信的服务质量要求。与固定翼无人机相比,多旋翼无人机的能量转换效率低,其飞行持续时间更短,需要经常更换电池,同时它在承载性方面也没有明显优势。
不论固定翼无人机还是多旋翼无人机,在任务决策方面都有如下要求:
➲易控性:无人机需要与地面控制台实时交互信息与指令,让地面控制台更方便地掌握无人机的飞行状态。
➲任务适应性:在不同飞行任务和不同飞行情况的制约下,需要根据不同情况去调整无人机的控制状态,在受控与自主控制之间灵活切换。
➲满足需求性:无人机在执行任务时一定要以任务需求为导向。
综上所述,多旋翼无人机在易用性和可维护性方面的优势比固定翼无人机更显著,但它在通信可靠性与通信链路持续性方面较弱,这对无人机通信与组网的影响非常明显。要实现相同的通信网性能,多旋翼无人机需要配置更加精准的控制方法,目前围绕多旋翼无人机的探测、组网的方法研究越来越受到学界和工业界的追捧 [7-8] 。多旋翼无人机的用户体验十分良好,围绕用户体验,多旋翼无人机在易用性方面的优势也会越来越突出。多旋翼无人机的续航性和可承载性是其在执行任务时需要考虑的因素,地面控制台需要根据多旋翼无人机反馈回来的数据(如飞行状态),指挥多旋翼无人机及时降落并更换旋翼和电池。随着电池技术、材料技术,以及通信、控制系统技术等不断发展,多旋翼无人机在通信可靠性、通信链路持续性、续航性和可承载性等方面也会朝着固定翼无人机的指标迈进,它在这方面与固定翼无人机的差距也会越来越小。
随着科学技术的不断发展,利用无人机集群进行组网,通过内部集群自主协调控制机制,使协同执行任务的设想成为可能。近年来,无人机集群被广泛应用,执行一些诸如运输重型负载、搜救等任务,以及海洋环境侦察等高风险任务 [9-10] 。由于无人机的体积小、覆盖范围低,一架无人机只能执行较为简易的任务。与单架无人机相比,无人机集群在执行任务方面有更大的优势。无人机集群具有同步信息传输速率更快、在执行相同任务时的能耗成本更低、覆盖范围更大、容错能力更高、灵活性更加显著等优势 [9] 。此外,无人机集群可以通过多架无人机来产生新的功能,如在精密定位的任务中,通过在多架无人机之间共享信息(如相对置位),无人机集群可以获得目标的更加精密的位置信息。
当无人机集群形成飞行网络时,如何设计无人机集群的控制方法是一个非常重要的问题。一般来说,无人机集群的控制方法有以下几个硬性指标 [9] :
(1)控制方法应当可以很容易地将整个无人机集群或无人机集群的中心从一个位置移动到另一个位置。
(2)在形成无人机集群时,集群内所有无人机的相对位置应保持稳定,不会发生相对运动。
(3)在无人机集群飞行时,集群内的无人机能够识别并避免障碍物,以防碰撞。
(4)在特定情况下,可将一个无人机集群分成多个子队形,分布式地执行同一个任务。
(5)确保无人机集群内部的通信网络能够满足协同规划、数据采集等任务的需求。
在无人机集群中,控制方法常采用集中式架构和分布式架构,如图1-5所示。
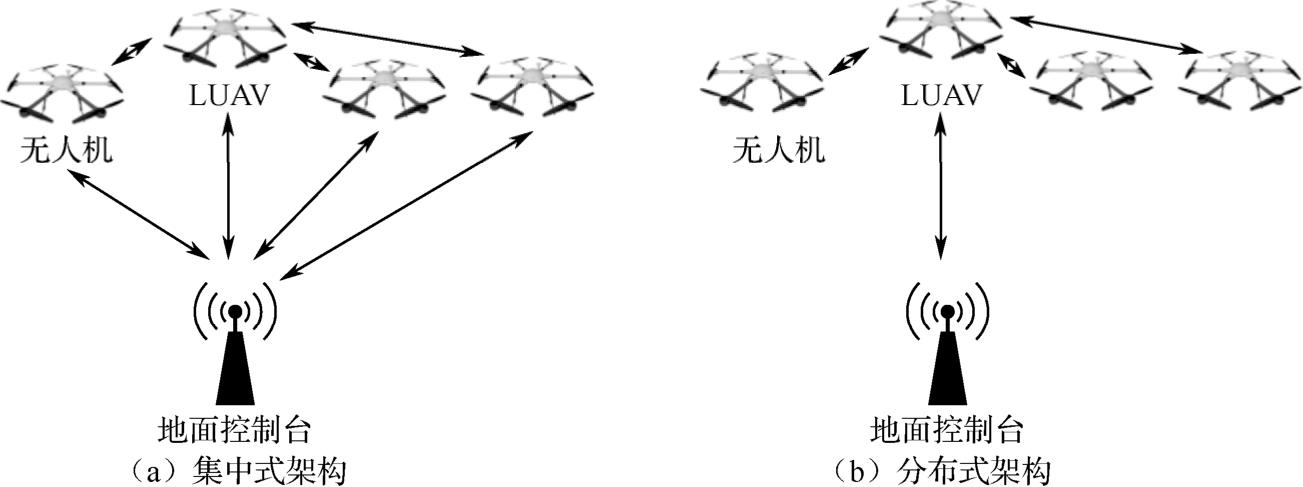
图1-5 无人机集群控制方法采用的两种架构
(1)集中式架构,如图1-5(a)所示。在集中式架构中,无人机的控制信号只能由领导无人机(Leading UAV, LUAV)或地面控制台生成 [5] 。在这种情况下,可以采用中心辐射式网络模型,类似于蜂窝网络。采用集中式架构的控制方法可以利用单个控制器为编队生成无碰撞轨迹。
(2)分布式架构,如图1-5(b)所示。在分布式架构中,每架无人机都可以基于自己的位置及其邻居无人机的信息来计算控制信号 [11] ,每架无人机在协同执行任务时所需的大量信息都是由自身产生的。将所有的计算都放在局部位置,可以得到更快的反应。
在集中式架构下,无人机通过无线通信链路直接连接到LUAV或者地面控制台上,无人机之间的通信都是通过LUAV或者地面控制台进行转发的。如果无人机集群的规模过大或者无人机集群通过无线信号连接地面控制台时所有通信必须经过控制中心(LUAV或地面控制台),就会使下行链路长度远远大于无人机之间距离,造成通信时延增大。另外,集中式架构中的无线通信链路可能会发生链路拥塞、网络时延过大和对带宽要求过高等问题,使控制信号传递不及时,导致无法完成任务。由于无人机集群是动态网络,天线的指向或者波束赋形必须由无人机集群的控制方法来调控,使无人机的天线尽可能指向LUAV或者地面控制台。如果控制中心发生故障,那么无人机之间就无法通信。对于集中式架构,所有的运动规划计算都是在一个位置进行的,因此需要较高的计算能力。由于在集中式架构中,控制信号的传输依赖于LUAV或者地面控制台,因此集中式架构不适合更大规模的无人机集群。集中式架构下不具有强鲁棒性,遇到链路拥塞可能会造成整个无人机集群失灵。事实上,在以下情形中:
(1)当大量数据需要同时传输到LUAV或者地面控制台时,集中式架构可能不理想。
(2)当大量信息被同步传输到地面控制台时,集中式架构的信息处理速度会被限制。如果通信速度慢且不可靠,那么就不允许在无人机集群中传输大量不相关的数据。
此外,在大多数民事应用中,正常操作不需要通过控制中心来实现无人机之间的通信。
在分布式架构中,无人机之间彼此之间互相连接,通常可以在多条无线通信链路上直接通过无线信号进行数据交互,无人机集群内部的少量功能更加齐全的LUAV可以在一条链路上连接到地面控制台。因为不需要所有的无人机都连接到地面控制台,所以可以减少通信时延 [13] 。但在分布式架构中,无人机的飞行会破坏编队,因此无线通信链路可能会出现断续问题。为了解决这个问题,无线通信网络需要通过连续的射频(Radio Frequency, RF)进行自我修复,并在断开的无线通信链路上灵活地进行重新配置。与集中式架构相比,分布式架构具有更大的灵活性、可靠性和更好的QoS。分布式架构的一个关键需求是它依赖于所有实体之间稳定的通信和可靠的信息共享。如果无线通信链路不够可靠,分布式架构的性能可能会显著下降。
上述两种架构在无人机集群中有各自的优缺点。在分布式架构中,通信资源是在整个无人机集群中分配的,这将使分布式架构的可靠性非常高,对用户应用程序来说也会更加透明。随着分布式架构的广泛应用,无人机集群在执行任务时,其部署成本和维护成本都很低。同时,无人机集群的应用要求集群具有更大的拓扑灵活性,以及无人机之间频繁地进行信息交换,这也是分布式架构在无人机集群中越来越受欢迎的原因之一。
无人机集群控制方法采用的架构取决于无人机集群的通信、硬件传感和控制方案。随着信息技术的发展,在无人机集群中使用无线通信网络给其带来维护成本低、可扩展性强、有效性高和鲁棒性高等优势。无线通信网络已成为无人机集群的关键技术之一。无线通信网络具有确保命令和控制信令得到正确交换、探测数据被传输回指定站点等功能。然而,由于无人机集群的快速机动,无线通信的信道性能是动态的,难以准确预测;此外,在很多情况下,通信链路故障或数据传输的长时延是不可避免的。如何设计无人机集群的控制方法(包括运动规划在内的控制方法),使无人机集群可以产生有效的网络拓扑,以确保良好的连通性,这对提高无人机集群的鲁棒性是一个挑战。通常,需要将协同控制和网络模型整合在一起,共同优化控制方法和路由方法 [9,12] 。
一般来说,无人机集群的控制方法可以分为以下三种模式:
(1)人在回路模式(Man-in-Loop Mode, MiL Mode)。这是一种典型的控制模式,无人机集群的飞行、悬停、探测、监控等操作完全由地面控制台监督和实时控制。
(2)人对回路模式(Man-on-Loop Mode, MoL Mode),又称半自主模式(Semi-Autonomous Mode)。无人机集群不仅可以被地面控制台控制,当无人机集群飞到地面控制台无线控制信令覆盖范围外时,无人机还可以获取针对自身的控制权,根据外界环境的变化来灵活调整无人机集群的飞行。
(3)自主模式(Autonomous Mode)。在这种模式下,无人机集群无须地面控制台的直接、实时人工控制,可根据飞行环境的变化来调整自身飞行参数,根据实际情况判断是否需要进行悬停、飞行、降落等操作 [9] 。
通常,一架无人机可以具备上述三种控制模式。MiL Mode或MoL Mode的自主控制程度较低。由于当前自动化技术的不断发展,以及出于人员风险最小化的考虑,在地面控制台中,人为控制模式的参与会不断减少。针对多架无人机组成的无人机集群,需要这些无人机能够根据外部环境的变化来自主控制自身的飞行状态,并且与无人机集群协调。自主模式在一般情况下不能改变整个无人机集群的飞行拓扑,否则就可能发生碰撞、坠机等危险。在无人机集群中,作为个体的无人机可以采用更灵活、自主的控制方法,这就要求每架无人机保持特定的相对位置、高度和角速度。在过去的几十年里,产生了许多自主协作任务分配和规划的控制方法。
由于无人机是无人驾驶系统,为了保证无人机集群更安全地飞行,必须针对无人机控制信令和探测数据传输来设计适当无线通信网络,因此对无线通信网络的控制是必需的。无人机集群的无线通信网络必须要满足高可靠、低时延的要求,并具有较高的完整性与鲁棒性,从而克服由于无人机集群的高动态性带来的飞行状态误差和通信链路中断的问题。为了控制无人机集群的无线通信网络,确保控制信令的正确交换,以及将执行任务中搜集到的数据传输到期望的位置,控制方法通常有以下要求 [9] :
(1)通过高效的无人机集群运动规划控制方法来创建有效的网络拓扑。
(2)适应无人机集群无线通信网络信号传输功率的拓扑控制方法,主要针对不同无人机密度和覆盖范围的探测通信任务,需要无人机集群自主调整各无人机无线信号的传输功率,保证控制信令和数据能够被正确传输。
(3)在无人机集群中部署或控制一定数量的无人机作为中继节点,在无人机集群中,如果网络拓扑过于巨大,无人机集群内部的每架无人机都需要实时地与其他无人机进行数据交互,此时直连链路会因为两架无人机的距离过远而无法保持稳定,因此发送端的无人机需要将数据传输给中继节点,由中继节点通过放大转发或译码转发的方法将数据传输给接收端无人机。这对无人机集群的自主控制方法和拓扑控制方法的有效性提出了挑战,灵活选择合适的中继节点在无人机集群也是一个复杂的问题 [14] 。
(4)确保通信连通性的任务分配控制方法。由于无人机集群的覆盖范围和服务用户的密度普遍较大,而且需要执行的任务通常都需要探测并定位多个目标源 [15] ,因此需要设计控制方法,动态地将任务分成多个子任务,同时动态地将无人机集群分成多个子集群来满足任务需求。
(5)合适的拓扑控制方法。设计合适的拓扑控制方法需要注意以下几个方面:
①针对拓扑、任务、飞行环境等不确定因素,拓扑控制方法需要有一定的鲁棒性。由于通信链路的多样性和无人机集群的高动态性,很难预测并获取无人机集群的无线通信信道状态信息(CSI),无人机集群拓扑控制方法应当能够尽可能使无线通信链路保持稳定,保证控制信令和数据的正确传输,因此无人机集群对不确定性因素具有鲁棒性是十分必要的 [6] 。
②带宽限制。无线通信频谱正变得越来越拥挤,因此拓扑控制方法要求无人机集群的控制信令和数据必须在尽可能少的信息交互下快速传输,对带宽的要求低。但为了实现有效的协调,无人机集群的控制信令交互必须要求最小的时延和最低的译码误差,目前使用毫米波作为传输媒介来传输无人机集群的控制信令越来越受到学术界的关注 [5] 。
③为了提高无人机集群无线通信资源的利用率,需要协同优化拓扑控制方法和通信网络协议,以最小的能耗、带宽、码率和无线信号传输功率等建立并维持无人机集群的无线通信链路。针对大量有前景的无人机集群应用(如搜救、边界探测、环境植保等),无人机集群的通信网络协议需要快速适应动态的无线通信网络环境 [16] 。
无线通信网络存在一定的局限性,这会显著降低无人机集群的性能。一方面,数据传输的时延,特别是在命令交付中,可能会导致无人机集群飞行不稳定和任务执行效率降低,这将带来严重的危险,如无人机之间的碰撞或无人机碰撞其他障碍物;另一方面,时延或丢弃发送给无人机的消息,无论在集中式架构中还是在分布式架构中,都可能导致无人机集群内部的无人机对外部环境感知信息不一致,导致不合理的任务规划。例如,在分布式架构中,无人机集群的时延可能会阻碍无人机对任务达成共识,可能会因为一些无人机闲置而无法完成任务。为了降低风险,大带宽、高速率的毫米波作为控制信令和数据的传输媒介已经部署到了无人机集群中,并显示出了优异的数据传输性能 [3,5-6,16] 。
近几十年来,针对多无人机/智能体编队问题的各种控制方法和运动规划方法得到了广泛的研究。目前主要有两类典型的无人机集群控制方法,即基于领导者-追随者(Leader-Follower, LF)的无人机集群控制方法和基于行为(Behavior)的无人机集群控制方法,这两类控制方法都受到了极大的关注。在集中式架构和分布式架构中,大多数研究工作都会使用其中的一类或两类协同的控制方法。
1)基于LF的无人机集群控制方法
文献[5-6]针对无人机集群提出了基于LF的无人机集群控制方法。基于LF的无人机集群控制方法的具体思路是:选择一架具有无线通信完全接入功能的无人机作为无人机集群的领导无人机(LUAV),并作为无人机集群的参考点或中心,无人机集群中的其他无人机作为追随者,为了保持无人机集群的队形,LUAV引导追随无人机(Following UAV, FUAV)进行飞行、悬停、降落等操作,同时要求FUAV之间保持所需的距离和姿势。基于LF的无人机集群控制方法是一种被广泛采用的无人机集群控制方法,因为其设计和实施相对比较简单,能够较容易地部署在一个无人机集群中。由于LUAV的存在,基于LF的无人机集群控制方法对随机因素带来的无人机集群飞行状态误差具有良好的鲁棒性。一般来说,基于LF的无人机集群控制方法通常采用集中式架构,要求无人机集群中的FUAV只与LUAV建立并维持无线通信链路。文献[17]揭示了基于LF的无人机集群控制方法的内在本质。基于LF的无人机集群控制方法可以保证LUAV和FUAV之间存在一个稳定的无线通信链路,使LUAV可以随时监控FUAV的飞行状态,它们之间可以及时交换距离和姿态等信息。在基于LF的无人机集群控制方法中的无人机是独立工作的,并且LUAV没有从FUAV中得到响应。当然,从FUAV到LUAV的信息传输可以提高无人机集群的鲁棒性。在基于LF的无人机集群控制方法中,交换的控制信令总量通常比分布式架构要少,因此通信效率要高得多。基于LF的无人机集群控制方法的主要缺点是高度依赖于LUAV的性能,有时难以控制和维持无人机集群的性能,特别是当LUAV出现故障或者LUAV与FUAV之间的无线通信链路中断时,无人机集群极其容易失灵,造成碰撞或坠机的危险 [9] 。
2)基于行为的无人机集群控制方法
文献[18]首先提出了基于行为的物体(包括无人机、无人车等)集群控制方法,然后利用混合向量加权控制函数作为性能指标,根据无人机集群要执行的不同任务类型(如向目标移动、避开障碍物、保持编队等)生成控制命令,从而解决了集群控制问题。该文献还根据总体任务要求,设计了4种不同的无人机集群任务控制方法,同时根据具体任务或外界环境的变化灵活地为每种方法生成一个性能增益指标。性能增益指标越高,表示该任务的重要程度越高,无人机集群的最终控制信令就是通过这些增益的加权组合来生成的。通过实施基于行为的编队控制,可以方便地维护无人机集群拓扑的完整性,并实现碰撞避免。然而,基于行为的无人机集群控制方法并不是基于无人机/无人车的运动学/动力学特性设计的,因此很难使用传统的数学/控制论方法来分析系统的稳定性,这使得从理论上证明基于行为的无人机集群控制方法的性能十分复杂。由于基于行为的无人机集群控制方法缺乏系统稳定性分析,可能并不太适合更大规模的无人机集群。尽管存在这样的缺陷,但基于行为的无人机集群控制方法能够通过一个控制命令完成不同的任务,因此它仍然被移动机器人和无人车(Unmanned Ground Vehicle, UGV)平台普遍采用。另外,基于行为的无人机集群控制方法具有更灵活的队形。在开放的天空中,无人机集群的稳定性是优先考虑考虑的因素,因此可以考虑使用基于LF的无人机集群控制方法。但在一个复杂的环境中,基于行为的无人机集群控制方法可以引导无人机接管自身的控制权。在未来,基于LF和行为的混合控制方法可能是趋势,混合控制方法既包含了基于LF的无人机集群控制方法的稳定性,也包含了基于行为的无人机集群控制方法的灵活性。文献[18]提出了一种融合基于LF的无人机集群控制方法和基于行为的无人机集群控制方法的混合无人车集群控制方法,混合无人车集群控制方法依赖于虚拟集群目标与跟随车辆之间的相对位置偏差。这种混合方法既具有主动行为控制方法的特点,又具有虚拟目标结构。基于行为的无人机集群控制方法主要关注单架无人机/单辆无人车的运动规划,通过基于LF的无人机集群控制方法,在LUAV和FUAV之间建立完备的监督机制,可以保证控制方法的完整性。LUAV和无人机集群中每架FUAV都建立了稳定的无线通信链路,可以保证FUAV在任何时候都被LUAV监控,LUAV可以根据监控信息灵活地控制FUAV的行动,从而避免无人机集群发生碰撞的危险。
如上所述,尽管基于LF或行为的无人机集群控制方法可以用于无人机集群控制,但它们有各自的缺点。例如,基于LF的无人机集群控制方法缺乏稳定的无线通信链路,而基于行为的无人机集群控制方法难以建模,不能保证无人机集群拓扑的稳定性。近年来,随着谐理论(Consensus Theory)的发展,基于图论的谐控制被证明能够解决集群控制问题。此外,一些研究结果表明,基于LF或行为的无人机集群控制方法可以统一在谐控制的总体框架中 [19] 。基于图论的谐控制克服了上述传统控制方法的不足。
无人机通信是无人机系统中至关重要的技术之一。无人机的远程控制与数据传输,包括无人机集群的形成与控制,都离不开无人机的通信能力。本节将对无人机通信及其标准化进行概述。首先,本节从无人机通信链路分类、无人机通信手段和无人机通信信道三个方面概述无人机通信技术;然后,对无人机通信标准化的现状进行简介;最后,本节讨论无人机通信中的机遇与挑战。
在无人机系统中,通信链路分为控制与非有效载荷(Control and Non-Payload Communication, CNPC)链路和有效载荷链路 [20] 。其中CNPC链路主要承载无人机与远程控制者、附近的飞行器等的关键安全信息,确保无人机的飞行安全可靠。有效载荷链路主要承载无人机与地面终端进行的通信任务,如图像、视频、数据包等。而在无人机的大规模部署中,为了保证通信的安全性和可靠性,国际电信联盟(International Telecommunication Union, ITU)将CNPC分为了以下三类 [21] :
(1)与空中交通管制中心的无线通信。在开放的空域中,通过无人机在空中交通控制中心与无人机控制中心建立的通信链路被称为空中交通管制(Air Traffic Control, ATC)中继。该中继的建立是为了保证无人机与控制中心之间收发数据的畅通,在高密度飞行器区域内可保证无人机控制中心与空中交通管制中心的通信畅通,从而避免无人机对其他飞行器产生安全性的影响。
(2)与无人机控制中心的无线通信。该类无线通信,一般分为上行链路与下行链路两类,其中,无人机控制中心通过上行链路将飞行与导航控制命令发送到无人机;无人机通过下行链路将当前的飞行状态发送到无人机控制中心。
(3)用于支持感知与规避的无线通信。感知与规避对应于在所有空域中的“看见与规避原则”,即飞行员确保自身与附近飞行器、地形、障碍物(如天气)的安全距离。
根据不同的应用场景,通常可将有效载荷链路分为以下三种链路:
➲移动终端-无人机链路:在基站发生故障时,无人机与移动终端进行通信需要依靠两者间的直连链路。
➲无人机-地面基站/网关链路。
➲无人机-无人机链路。
对于CNPC链路与有效载荷链路,由于其承载的任务不同,所以在无人机通信网络中两种链路所需的通信速率、时延和频段也有所不同。3GPP给出了这两种链路的一些需求指标 [21] :对于CNPC链路,时延在50ms以下、通信速率在60~100kbit/s、丢包率不能高于10 -3 ;对于有效载荷链路,要保证上行链路的通信速率达到50Mbit/s,在有些应用场景中甚至要求通信速率达到Gbit/s量级,时延同样视不同应用场景而定,一般在100ms或以上。出于CNPC链路安全性的考虑,CNPC链路对频段同样存在要求。国际民用航空组织(International Civil Aviation Organization, ICAN)规定无人机的CNPC链路必须在受保护的航空频段。ITU的进一步研究表明,为了适应未来一定数量的无人机CNPC链路,需要使用34MHz的地面频谱和56MHz的卫星频谱来支持视距与非视距范围内无人机飞行。为满足上述要求,2012年世界无线电通信大会(World Radiocomunication Conferences, WRC)将503~5091MHz的C段频谱用于无人机CNPC链路。有效载荷链路的频段则取决于其应用场景,通常LTE带宽可以能满足有效载荷链路的需求;对于某些对数据传输速率要求较高的应用场景,可能会用到毫米波频段。
在无人机通信中,常用的无线通信手段主要包括直连通信与卫星通信 [20] 。直连通信是指无人机与其对应的地面节点(如遥控器或地面基站等)直接进行的点到点通信。在过去的无人机民用通信中,这种通信手段经常被使用。直连通信具有布置简单、成本较低的优点,但其只能在视距范围内进行通信,这就使得直连通信链路很难应用于复杂的传播环境。例如,在城市中,直连通信就很容易被高楼或树木遮挡,从而影响无线通信的质量。为了使无人机能够连接互联网,与其进行直连的地面节点需要与网关相连,这会导致无线数据在回传时产生极大的时延。此外,直连通信在面对干扰或攻击时极易被中断,其安全性无法得到保障。由此可知,直连通信将无法应用于部署大量无人机的应用场景。
由于单纯依靠地面基站与无人机的直连通信无法应对更为复杂的应用场景,而利用卫星进行通信则不会受到复杂应用场景的影响,同时由于卫星通信的覆盖范围较广,所以在无人机通信中卫星通信成为一种不错的选择。随着中大型无人机的增多,普通的地面基站已经无法满足日益增长的通信需求,仅仅依靠地面基站和无人机进行直连通信容易产生信号盲区,在突发情况如地震救援时,无人机又有着不可替代的作用,因此在地面基站暂时中断的情况下,利用卫星进行无人机通信可以大大提升无线通信链路的可靠性。在正常情况下,卫星-无人机通信则被广泛应用于无人机与地面节点分布广泛的应用场景中,如海洋通信或偏远地区。卫星通信还能用于无人机的导航与定位。但卫星通信同样也拥有一些弊端。首先,卫星与无人机或地面基站距离较远,所以会不可避免地产生较大的时延。如前所述,CNPC链路对时延的要求极高,这对卫星通信提出了巨大的挑战。其次,由于卫星所在的高度决定了卫星的数据终端所处环境较为恶劣,所以如何在保证安全性的前提下降低成本也是卫星通信面临的挑战。此外,由于无人机在尺寸、重量和功率方面的限制,使其很难携带过于笨重的卫星通信设备,这同样会影响卫星通信的性能。为了应对这些挑战,卫星通信的未来发展方向可能是地面基站与卫星相结合:在近距离操作时,使用地面基站发送控制指令;在远距离操作时则启用卫星,确保无人机能时刻接收到无人机控制中心发送的命令。同时,根据不同应用需求使用不同的方案,如针对应急与控制采用低成本的窄带方案,在远距离图像视频回传中则使用宽带方案。
无人机通信网络中主要存在两类信道:无人机-地信道以及无人机-无人机信道 [22] 。
(1)无人机-地信道。无人机-地信道与载人飞行器系统中的空-地信道不同。在载人飞行器系统中,地面基站通常被修建在开阔地带,无人机系统中地面基站的修建地点取决于不同的应用场景,这使得地面基站附近的环境不可预知。尽管在大多数场景中,我们会希望无人机-地信道仅由LoS(Line of Sight,视距)信道组成,但由于房屋甚至机身的遮挡,使用LoS信道对无人机-地信道进行建模往往是不可行的。对于在低空飞行的无人机,这些遮挡会带来反射、折射、衍射等多径部分,所以对于这部分信道,不能将其等效为载人飞行器系统中空-地信道的建模。对于在沙漠或海洋等空旷区域飞行的无人机,一般采用双线模型进行建模,这是由于在空旷区域,LoS信道占主导部分,且多径信道一般只包含反射部分;而对于在较为复杂区域飞行的无人机,一般采用莱斯信道进行建模,通过取值不同的莱斯因子对应不同的环境。
(2)无人机-无人机信道。由于在天空中遮挡可以忽略,所以在无人机通信中的空-空信道通常只考虑LoS信道部分。尽管由于地面反射,空-空信道也会受到多径衰落的影响,不过相比于无人机-地信道,这部分衰落通常无须考虑。但由于无人机的高速飞行,所以无人机-无人机信道可能会产生比无人机-地信道更高的多普勒频移,这是无人机-无人机信道建模中需要重点考虑的部分。随着毫米波频段的开发,无人机-无人机信道有可能在毫米波频段工作,尽管毫米波通信可以给无人机通信带来更高的效率,但其所在的更高频率也会导致更大的多普勒偏移。同样,毫米波波束赋形技术的应用将使无人机-无人机信道存在较大的稀疏性,这些无疑都是信道建模中的重要影响因素。
3GPP(3rd Generation Partnership Project)协议族已经成为主流的全球移动技术标准化开发主体协议之一,无人机通信的标准化有助于确保设备供应商与无线通信网络运营商之间的兼容性,并降低网络运营和设备成本。3GPP R15设计并统一了第一个全球第5代(5th Generation,5G)新无线电(New Radio, NR)标准。与此同时,4G长期演进(Long-Term Evolution, LTE)通信协议也将继续发展。无人机通信标准化设计的需求如下所述 [23] :
➲当配置的小区数量满足触发条件时,可基于测量报告的干扰检测来稳定无人机的无线通信链路;
➲当无人机的飞行高度超过网络配置的阈值时,需要及时向地面控制台或地面基站报告无人机当前的实时高度和位置;
➲从无人机到网络的飞行路径信息的信令需要被及时传输;
➲空中无人机的识别与授权技术要保证蜂窝通信的安全。
在连接模式下,无人机需要进行设备配置,并测量正在服务的小区和邻居小区的通信质量,以便在服务小区的通信质量下降时能够切换到通信质量足够好的邻居小区。具有基于事件的测量报告触发机制的参考信号参考功率(Reference Signal Reference Power, RSRP)标准是用于无人机迁移或者切换目标的主要测量标准化类型。LTE标准化协议指定了几个不同的事件,这里要考虑的相关事件称为A3、A4和A5。事件A3是指当邻居小区的配置偏移量优于服务小区的事件;事件A4是指邻居小区通信质量变得优于绝对阈值的事件;事件A5是指服务小区通信质量变得比一个绝对阈值差,而邻居小区通信质量变得比另一个绝对阈值好的事件。还有一个名为即时触发(Time-To-Trigger, TTT)机制的滑动窗口参数在这里起作用,传统的基于事件报告的标准化工作协议需要将任务需要通过定义为TTT的时间滑动窗口来实现,以便触发测量并将无人机从任务中获取的信息发送到LTE网络。TTT是在测量配置中给予无人机参数,该测量配置还描述了无人机在测量其他小区时应该考虑的事件和相应的阈值。
LTE网络可以配置一个地面无人机,将无人机位置坐标和水平速度附带到任何RSRP测量报告中。如果有可用的位置坐标和水平速度信息,则无人机将附带位置坐标和水平速度信息。发送RSRP测量报告时的基于事件的触发与无人机的位置坐标或水平速度无关,而是与RSRP值相关,如事件A3。确定为空中无人机运动与控制指定的信令传递的机制是否触发将取决于无人机的飞行高度,报告除了水平速度和位置坐标,还包括飞行高度和垂直速度,其中事件阈值为无人机的飞行高度。当无人机配置了该事件后,且无人机的飞行高度超过阈值时,需要根据3GPP标准向地面控制台或者地面基站报告事件A3。3GPP正在为无人机飞行高度报告指定一个一致性测试,以测试高度报告来判断无人机是否可以正常工作。测试高度报告依然需要包括无人机的飞行高度,但位置坐标、垂直速度和水平速度等信息也都包含在该报告中。3GPP的相关工作的范围主要用于低空无人机,并且允许考虑无人机到达距离地面300m的上空,因此配置的高度阈值需要覆盖地面以上300m的高度。由于地面高度相对于海洋的高度是随位置的变化而变化的。一般来说,无人机可用范围规定的高度阈值包括距离海平面-420~8880m。
3GPP R15支持无线移动通信网络向无人机请求飞行路径信息,无人机可以通过应用层连接到无人机交通管理系统(UAV Traffic Management System, UTMS),向地面控制台或地面基站实时输出无人机的路径信令。根据LTE的标准化规范,以及出于信息安全性的考虑,UTMS和无人机之间的通信对LTE或NR网络是不可见的,因为任何LTE或NR网络的逻辑节点和UTMS之间没有标准化接口。为了使地面基站知道无人机的飞行路径信息,地面基站需要从UTMS接收信息。表示无人机飞行路径的最简单的方法是起飞点和着陆点,以及一些中间点的位置坐标。除了所规划的飞行路径点的位置坐标,无人机的飞行路径信令还包括描述无人机计划何时到达该路径点的时间。LTE或NR网络对无人机飞行路径的精确度没有进一步的要求,因此在实际的飞行中,无人机飞行路径信令包含的信息必须被认为最有效的附加信息,才能保证地面基站及时利用无线通信网络与无人机建立标准化通信链路。一般来说,较高海拔的小区覆盖是碎片化的,很难根据计划的飞行路径点确定准确的目标小区,因此无人机的飞行路径信息不能直接用于小区切换。LTE或NR网络可以根据无人机飞行路径信息进行粗略的资源规划,例如,当有几架无人机前往某一区域时,LTE或NR网络可能会提前做好准备。LTE和NR网络对无人机飞行路径报告的支持与对测试高度报告的支持是相同的,唯一的区别是哪个标准化协议(LTE或NR)会允许事先进行配置,因为无人机在飞行时的信号对NR网络来说是不可知的。
无人机可以通过应用层连接到UTMS,并从那里接收飞行授权。这种通信对LTE或NR网络是不可见的,因为LTE或NR网络的逻辑节点和UTMS之间没有标准化接口,即使无人机的指挥和控制数据包括无人机授权或无人机身份,网络节点也不会意识到这一点。例如,在美国和日本都有相关规定,允许无人机使用移动通信网络进行连接。3GPP指定了一种基于订阅的授权方法,对无人机功能的支持存储在归属用户服务器(Home Subscriber Server, HSS)中的用户订阅信息中,在HSS中还存储了国际移动用户识别码(International Mobile Subscriber Identity, IMSI)以及一些与安全相关的信息。当一架无人机访问一个小区,且即将通过空中接口建立无线电资源控制(Radio Resource Control, RRC)上行链路时,无人机与地面基站同时通过S1AP接口向移动管理实体(Mobility Management Entity, MME)请求无人机的订阅信息,MME通过S6接口从HSS接收用户信息。需要注意的是,订阅信息的作用是授权无人机接入无线通信网络。为了将用户授权与有关设备信息结合起来,订阅信息需要与特定的无线信息比特结合起来。当前版本的3GPP指定的功能比特通常由无人机自己决定,这让无人机制造商可以在给定的任务中实现专业功能自由组合。但由于无人机识别的重要性,如果设备的订阅具有无人机的授权,则必须同时支持测试高度报告和基于RSRP的测量触发机制。无人机可以将订阅的信息与来无人机无线电能力结合起来,以便识别无人机在飞行时是否已被授权连接到无线电接入网络(Radio Access Network, RAN)。
无人机通信的信道与地面通信的信道存在着许多不同,这给无人机通信网络的设计带来了新的机遇和挑战,这些机遇与挑战主要是由无人机的飞行高度、飞行速度、通信信道以LoS径为主等特性带来的 [20] 。
(1)飞行高度。与传统的地面通信相比,无人机的飞行高度要远高于地面基站的高度。地面基站的高度通常在25m左右,而我国对轻型无人机的飞行限高为120m。飞行高度的增加势必会带来更大的信号覆盖范围,但与之对应的就是由于通信距离变长而引起的信号衰落。现有的地面基站采用的大都是带有下倾角的天线,以满足与地面用户通信的需求。在地面基站与无人机进行通信时,带有下倾角的天线同样会带来一部分信号的损失,这就需要设计新的天线技术或者设计新的通信手段,以满足地面基站与无人机之间的通信。同样,在现有的地面通信系统中,地面基站提供的是较为传统的2D区域覆盖,但无人机需要地面基站为其提供3D区域覆盖,这对地面基站的天线技术就提出了新的要求。如何使无人机通信网络既保证无人机的大覆盖范围,同时又解决地面基站对无人机信号的覆盖,就成为无人机通信中的一项重要挑战。
(2)飞行速度。无人机的高移动性是无人机通信网络中一项十分重要的特性。与地面用户大部分处于低速运动状态或者静止状态不同,无人机用通常是高速飞行的,无人机之间也可能会存在高速的相对运动,这使得无人机在飞行过程中需要进行频繁的切换,同时会与地面用户或地面基站之间产生时变的无线回传链路,这势必会造成无人机通信网络的低频谱利用率以及高额的信令开销。为了应对无人机高移动性所带来的困难,人们开始研究基于无人机通信感知的控制方法,即根据无人机所在的高度、飞行速度、位置坐标等信息,以及其服务的地面用户的位置、通信任务来动态调整飞行路径。同时,针对无人机执行不同任务的场景,以认知的方式动态协同通信节点,更高效地利用频谱资源,确保在不同场景下使通信信道容量最大化。
(3)通信信道以LoS径为主。在传统的地面通信系统中,由于建筑物或环境等的遮挡,LoS径往往在通信过程中被直接阻断。而无人机通信网络中,由于无人机-地信道之间的遮挡较少,因此基本上不会产生由于散射、衍射所带来的阴影衰落与多径衰落。这样的信道特征将使无人机与地面基站和地面用户的通信链路更加可靠。同时,由于无人机通信信道以LoS径为主,因此可以认为信道在时域和频域上是慢变甚至不变的。虽然这种信道在通信任务调度和信道资源分配上有一定的优势,但也存在空地干扰的弊端,这种弊端将限制同时出现地面用户和空中用户的无人机的系统容量。在无人机的上行链路中,通信信道以LoS径为主,将对同频的邻居小区产生干扰;在无人机的下行链路中,也会对同频的邻居小区产生干扰。对无人机而言,如何消除这种相互干扰是一个十分重要的研究课题。这种信道特征还会带来诸如安全性较差等的问题,这是由于信道元素(以LoS径为主)较为单一,因此更容易受到其他恶意节点的攻击,这也给无人机通信网络的物理层安全设计带来了挑战。
(4)其他挑战。除了前述的挑战,无人机通信网络还面临许多其他的挑战,如无人机在飞行过程中重量和功率的限制、无人机通信网络的信道难以估计等问题。前者会要求对无人机所携带的中继设备进行特殊定制以满足无人机的尺寸需求,同时功率限制也会使无人机的通信性能受到飞行时间的影响,进而影响整个系统的能耗;后者则是无人机通信网络的基础,在信道无法得到准确估计的情况下,无论无人机的最优位置部署,还是无人机的动态轨迹优化,都很难使无人机通信网络的性能达到最优。
相对于单架无人机而言,多架无人机构成的无人机通信网络在数据共享、任务执行、可扩展性、可生存性、经济成本、隐蔽性等方面有明显优势。在数据共享方面,无人机通信网络使无人机间能够进行信息交互、数据共享,是多无人机协作完成任务的重要基础。在任务执行方面,多架无人机协同工作,使无人机通信网络能够扩大无人机的监视范围、增大通信距离和覆盖区域,从而大大提高任务的执行速度,完成单架无人机无法完成的任务。在可扩展性方面,无人机通信网络使无人机规模的灵活扩展成为可能,可根据任务要求调整监视范围、通信距离和覆盖区域。在可生存性方面,由于无人机受限于自身能量和体积,单架无人机容易遭受能量耗尽、设备故障或者遭遇袭击等意外,具有很大的不稳定性,多架无人机协同组网,能够在很大程度上克服这些问题,提升无人机通信网络的可生存性和抗毁能力。在经济成本方面,无人机通信网络使得多个小型无人机协同完成任务成为可能,相对于使用大型无人机,多个小型无人机的成本更低。相对于大型无人机,小型无人机具有更好的隐蔽性,因此无人机通信网络更适合军用、警用等对隐蔽性要求高的场景。
由于无人机通信网络具有以上技术优势,其在军事和民事领域得到了越来越多的应用。在军事领域,能够协作互联的无人机通信网络可应用于快速态势感知、目标打击、辅助指挥等任务。在民事领域,无人机通信网络能够应用于抢险救灾、火灾检测、电子对抗、信息采集、交通监控、遥感等场景。无人机通信网络示意图如图1-6所示,根据应用场景的不同,无人机通信网络具有多种组网方式,形成了不同的无人机通信网络类型。按照无人机是否使用地面基础设施,可以将无人机通信网络分为无人机-蜂窝融合网络和无人机空中网络。无人机-蜂窝融合网络主要关注无人机与地面的通信,无人机利用现有的蜂窝网络基础设施和技术,可实现大规模无人机之间或无人机与地面之间的通信。无人机空中网络主要关注无人机的对空通信,无人机不受到地面基础设施限制,可实现多无人机之间的空中组网。本节将分别对无人机-蜂窝融合网络和无人机空中网络的分类、特点及技术优势进行介绍。
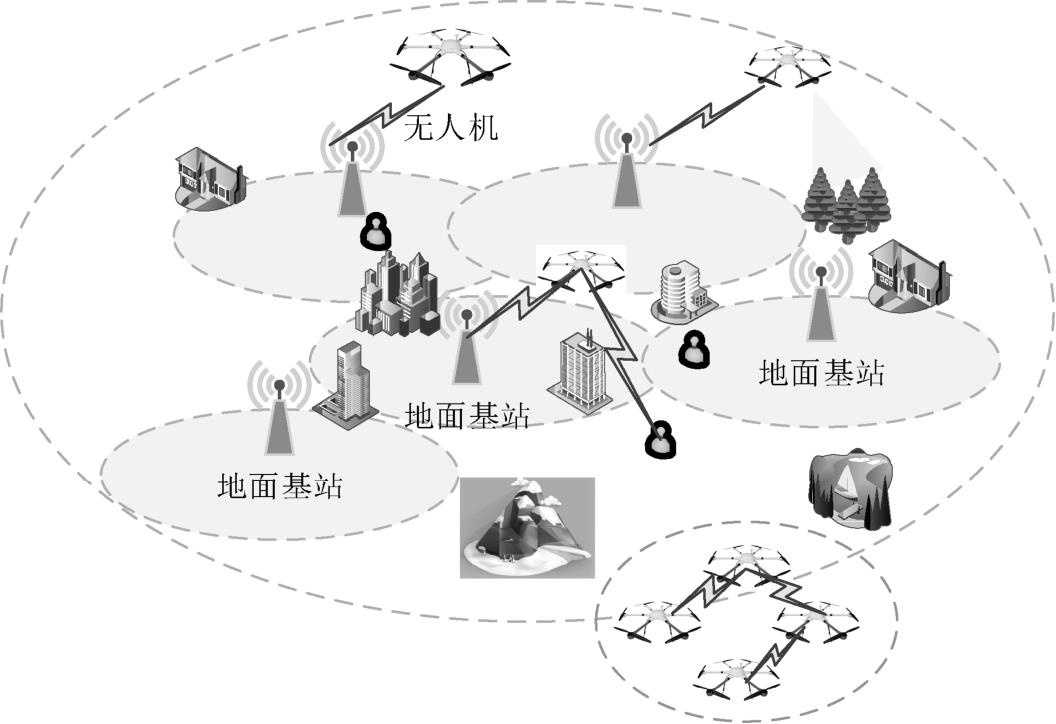
图1-6 无人机通信网络示意图
1.3.3节介绍了无人机通信链路的分类和常用的通信手段,但上述内容没有涉及如何实现大规模无人机通信。出于成本的考虑,无论直连通信还是卫星通信,都难以经济、高效地支持大规模无人机通信。同样,为了实现大规模无人机通信而建设专用的地面网络也将带来高昂的成本。
与1.3.3节介绍的无人机通信手段不同,蜂窝网络发展至今,经历了从第一代(1G)移动通信到第五代(5G)移动通信的变革,已经具有相对完备的基础设施和几乎无处不在的覆盖能力,足以支持大规模、高密度的无人机通信。在蜂窝网络的覆盖范围内,无人机能够利用现有的蜂窝网络基础设施和技术,经济高效地实现无人机通信网络与地面基站的通信。尤其是最近蓬勃发展的5G移动通信技术,已经开启了万物互联的时代,能够提供高速率、低时延的通信服务,可以满足高数据传输速率且对时延敏感的无人机通信需求。因此,无人机-蜂窝融合网络受到了极大的关注。与此同时,无人机为蜂窝网络技术的发展提供了新的可能。由于无人机具有一定的飞行高度以及灵活机动的特性,不仅能够避免受到地面环境的影响,而且在辅助蜂窝网络通信方面具有极大的发展潜力。
按照无人机在网络中的角色不同,可以将无人机-蜂窝融合网络分为两大类:一类是无人机作为空中用户,从空中接入蜂窝网络,我们将这类网络称为蜂窝连接的无人机通信网络(Cellular-Connected UAV Network);另一类是无人机作为空中基站/中继等空中通信平台提供空中接入,协助蜂窝网络,我们将这类网络称为无人机辅助的无线网络(UAV-Assisted Wireless Network)。接下来,将分别介绍这两类网络的特点和技术优势。
1)蜂窝连接的无人机通信网络
在蜂窝连接的无人机通信网络中,无人机作为空中用户接入蜂窝网络,通过地面通信系统和地面网络的支持,实现了大规模无人机之间以及无人机与其他用户之间的通信。蜂窝连接的无人机通信网络具有以下显著的优势。首先,蜂窝网络由运营商提供,并且在全球已经实现了极大的覆盖范围,因此蜂窝连接的无人机通信网络不仅易于使用、具有极大的可用范围,而且成本还比较低。在蜂窝连接的无人机通信网络中,处于不同位置的无人机之间以及无人机与其他用户之间,都能够方便快捷地实现无线连接。其次,蜂窝网络具有先进的技术和认证机制,因此蜂窝连接的无人机通信网络能够利用蜂窝网络的先进技术和认证机制,提升无人机通信网络的性能。例如,5G移动通信系统具有完善的信道接入机制,并且能够达到10Gbit/s的数据传输速率和1ms的时延。无人机作为空中用户时,可以利用现有技术实现较高的无人机通信网络性能。当无人机的密度增大时,仍然能够通过设备到设备(D2D)等蜂窝网络技术实现高效的通信。最后,蜂窝辅助定位为无人机定位提供了新的手段。无人机定位是无人机导航、自动驾驶的重要基础,蜂窝辅助定位为无人机定位提供了重要补充,能够提升无人机定位精度和导航性能 [23] 。
2)无人机辅助的无线网络
随着通信设备的小型化,在无人机上搭载小型基站/中继等通信设备,可将无人机作为空中平台,从而辅助地面通信系统。在无人机辅助的无线网络中,无人机不再作为空中用户,而是搭载了小型通信设备作为空中通信平台,辅助服务地面网络用户。与传统蜂窝网络中的静态基站/中继相比,无人机辅助的无线网络具有以下明显优势。首先,无人机空中基站能够灵活快速部署,响应不同场景的需求。在应急抢险、灾后救援等场景中,无人机空中基站的灵活部署优势将更加明显。其次,无人机在空中飞行,不受地面环境的影响,更容易与地面建立视距通信链路。无人机基站/中继相对而言不易受到地面树木、行人、楼宇等障碍物的影响,从而能够为地面网络的通信调度提供可靠的视距通信链路。在无人机的辅助下,地面无线网络能够为受障碍物遮挡影响的用户提供更高的服务质量。最后,由于无人机的高移动性,无人机基站/中继具有更高的自由度,可以提升通信性能,满足地面无线网络的通信需求。5G移动通信对峰值数据传输速率、通信时延、服务终端数量等提出了更高的要求。传统地面基础设施的自由度受限,不利于针对不同场景的需求来灵活地配置通信指标。而无人机辅助的无线网络能够利用无人机基站/中继的高自由度,在增强型移动宽带、大规模机器通信、任务关键型通信等多种场景中灵活部署,灵活满足不同场景的关键通信需求。
尽管无人机-蜂窝融合网络具有种种优势,但仍然存在许多蜂窝网络不适用的情况。例如,在蜂窝网络未覆盖的沙漠、海洋等偏远地区,无人机就无法通过蜂窝网络实现大规模无人机之间的通信或无人机与地面用户的通信。此外,在许多无人机协同执行任务的场景下,如多架无人机协同侦察、视频监控、采集数据等,需要建立多无人机之间的通信链路,通过地面基础设施作为中间节点不再是最优选择。在无人机空中网络中,无人机通信不再受到地面基础设施覆盖范围的限制,能够将无人机应用扩展到更多的军用和民用场景。
无人机空中网络主要指多无人机间不通过地面基础设施、直接在空中建立通信网络。无人机空中网络具有多种形式,按照其网络组织形式的不同,可以分为无人机主从网络、飞行自组织网、无人机集群等。
1)无人机主从网络
无人机主从网络是一种中心化的网络,由一架具有较强通信和负载能力的主无人机和多架具有一般通信和负载能力的从无人机组成。该网络中的主无人机具有数据汇聚、数据回传等功能,从无人机将感知、采集到的数据发送给主无人机,再由主无人机将这些数据传输到外部网络。无人机主从网络适用于许多任务驱动型场景,如交通监控、森林防火、灾情检测等。以无人机主从网络执行交通监控任务为例,多架从无人机在监控区内分散巡航,并将采集的实时视频监控发送到主无人机,主无人机将视频数据汇聚并回传到地面基站。无人机主从网络具有以下优势。首先,无人机主从网络中的从无人机与主无人机直接连接,避免了多跳产生的时延开销和能耗,因此在需要实时数据传输的场景下,无人机主从网络具有低时延、低能耗的优势。其次,无人机主从网络允许异构无人机协同工作,可以在完成任务的同时降低成本。通过配置少数能力较强的主无人机,无人机主从网络降低了对大量从无人机的通信和负载能力要求,使得网络更加经济高效。
2)飞行自组织网(Flight Ad Hoc Network, FANET)
虽然无人机主从网络适用于许多任务驱动型的场景,但同时也面临着安全性和可扩展性问题。一方面,主无人机作为无人机主从网络的中心,一旦遭到破坏,将导致整个网络不可用,因此无人机主从网络在复杂环境下面临着巨大的安全性风险。另一方面,受到主无人机通信和负载能力的限制,无人机主从网络通常适用于规模较小的无人机通信网络,其可扩展性有限,不适用于大规模无人机通信的场景。
相对于中心化的无人机主从网络,去中心化的飞行自组织网能够有效解决上述问题。移动自组织网(Mobile Ad Hoc Network, MANET)是一种无基础设施的、动态自组织的网络,用于实现笔记本电脑、手机和对讲机等移动设备之间的点对点通信,这些移动设备通常使用IEEE 802.11a/b/g/n等协议在带宽受限的无线链路上进行通信。MANET中的每个移动设备都可以随机移动,因此这些移动设备与其他设备的链路将频繁改变。此外,为了支持两个相距较远节点的通信,中间的一些其他节点需要作为中继节点来转发数据。车载Ad Hoc网络(VANET)是MANET在车载网络上的应用,它能够支持二维高速移动的车载通信。FANET是MANET和VANET在无人机通信领域中扩展应用,在FANET中,无人机具有收发数据与路由的功能,各无人机之间通过信息交互获取资源占用信息和运行状态信息,从而通过多跳方式传输控制指令,建立无中心的无线移动通信网络。FANET中的无人机以分布式、自组织的方式进行信息交互,具有以下显著优势。首先,FANET不依赖于地面基础设施。无人机自身作为通信节点和中继节点,不需要地面基础设施,不受地面基础设施覆盖范围的限制,受地形因素的影响小,可满足复杂、偏远环境下的无人机组网需求。其次,FANET具有抗毁和自愈能力。FANET继承了MANET的优点,FANET中的无人机是对等的,可以随时加入和退出网络,任何无人机的故障都不会影响FANET的运行,FANET具有良好的抗毁和自愈能力。最后,FANET的拓扑结构灵活。FANET的拓扑结构可以根据应用场景采取不同的形式,如网状、环状、星状,甚至直线状等网络拓扑结构,因此FANET具有更强的环境适应性。
3)无人机集群
尽管FANET是一种健壮灵活的小型无人机通信网络,但考虑到在整个网络上实现动态可靠的路由协议的复杂度和困难性,FANET通常无法为大规模无人机提供一个可扩展的解决方案。多跳次数的增加也将带来更多的能耗、较低的频谱效率和较长的端到端时延。
相对于FANET,无人机集群有望实现更大规模和更加智能化的无人机组网。无人机集群是指一群低成本小型无人机在操控人员(空中或地面)的指挥或监管下,参照蜜蜂等昆虫的集体行动模式自主组网并共同完成特定的任务。构成无人机集群的无人机可以是同构的,也可以是异构的;其组网方式可以是中心化的,也可以是去中心化的。因此,无人机集群是一种灵活的大规模无人机组网方式。在适当场景下,无人机集群可以进行编队飞行。“长机-僚机”飞行模式是一种典型的无人机集群飞行模式,在这种模式下,无人机集群按照统一的飞行速度和方向进行编队飞行。僚机节点具有感知、采集数据和无线通信能力,完成数据采集后通过多跳通信向长机发送数据,长机具有连接外部网络的网关功能,能够分发感知和采集到的数据。在其他场景下,无人机可以取消编队,分别进行避障等操作。相对于其他组网方式,无人机集群的优势主要体现在以下两方面。一方面,无人机集群在其内部可以形成多个自组织网或者其他异构网络,同时完成多项任务,因此无人机集群能够支持更大规模的无人机组网,从而提升组网和工作效率。另一方面,无人机集群能够借鉴蜂群、蚁群等群体智能模式,实现智能化的控制和组网,因此无人机集群能够进一步提升无人机通信网络的智能化、自主化程度,在增加无人机数量时无须大量增加控制成本,有利于无人机通信网络在复杂环境(如战争环境)下的应用。目前,无人机集群在战场态势感知、装备体系协同、诱骗干扰和集群攻击等方面具有广阔的应用前景。
无人机集群和FANET都是主要面向无人机内部通信的网络。随着无人机在不同领域的应用,其应用场景越来越多样化,为了满足泛在、灵活、协作的通信与网络需求,异构网络统筹协同、一体化网络部署与实施成为未来信息通信的重要发展趋势之一。为此,无人机不仅需要进行机群内部通信,还面临着与车辆、卫星、船舶等多种目标通信的需求。将空基无人机网络与天基卫星网络、地基物联网和海基远洋网络进行融合,形成空-X一体化网络,如空地一体化、空海一体化和未来的空天地海一体化网络,能够充分发挥无人机通信网络的优势,实现异构网络协作双赢,具有广阔的发展前景和巨大的应用价值。