
下载掌阅APP,畅读海量书库
立即打开



2017年初,3GPP技术规范小组(TSG)批准了一项新的研究项目,即通过LTE网络增强对飞行器的支持 [1] 。该研究项目提出了地面基站与飞行高度在1.5~300m的飞行器之间的详细信道模型(以下称为建议信道模型),对LoS概率、路径损耗、阴影衰落和快衰落等进行了综合建模。该建议信道模型是针对三种典型的3GPP部署场景提出的,这三种部署场景分别是乡村宏蜂窝(Rural Macro, RMa)、城市宏蜂窝(Urban Macro, UMa)和城市微蜂窝(Urban Micro, UMi)。
建议信道模型中信道参数的生成过程如图4-4,注意,该图给出的是下行链路的信道参数生成过程,若要建模上行链路,则需要互换角度参数中的发射角和到达角。
建议信道模型复用了3GPP对0.5~100GHz频段信道模型的研究模型 [2] ,三种应用场景下的LoS概率表达式如表4-3所示,其中 d 2D 表示基站到无人机的水平距离。
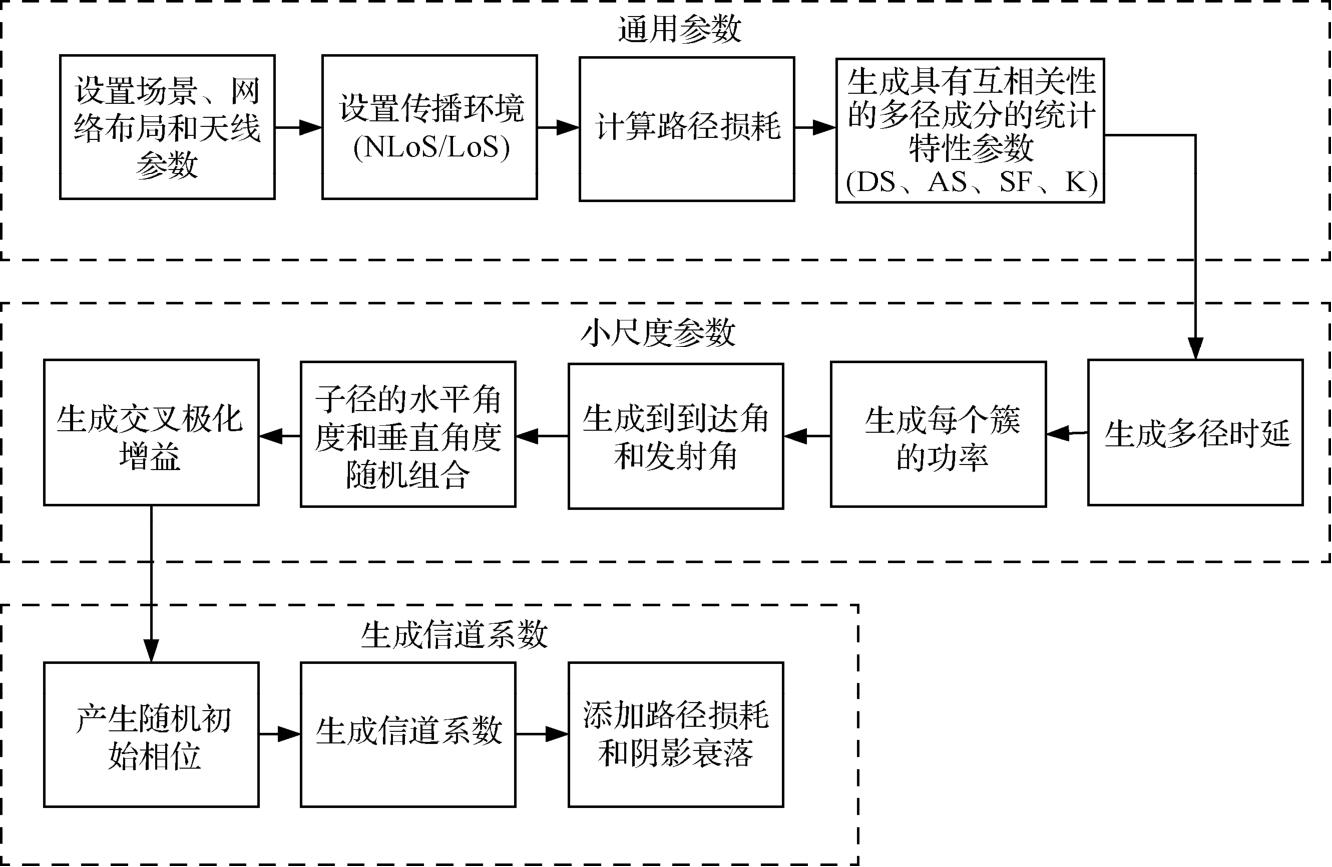
图4-4 建议信道模型中信道参数的生成过程
表4-3 三种应用场景下的LoS概率表达式
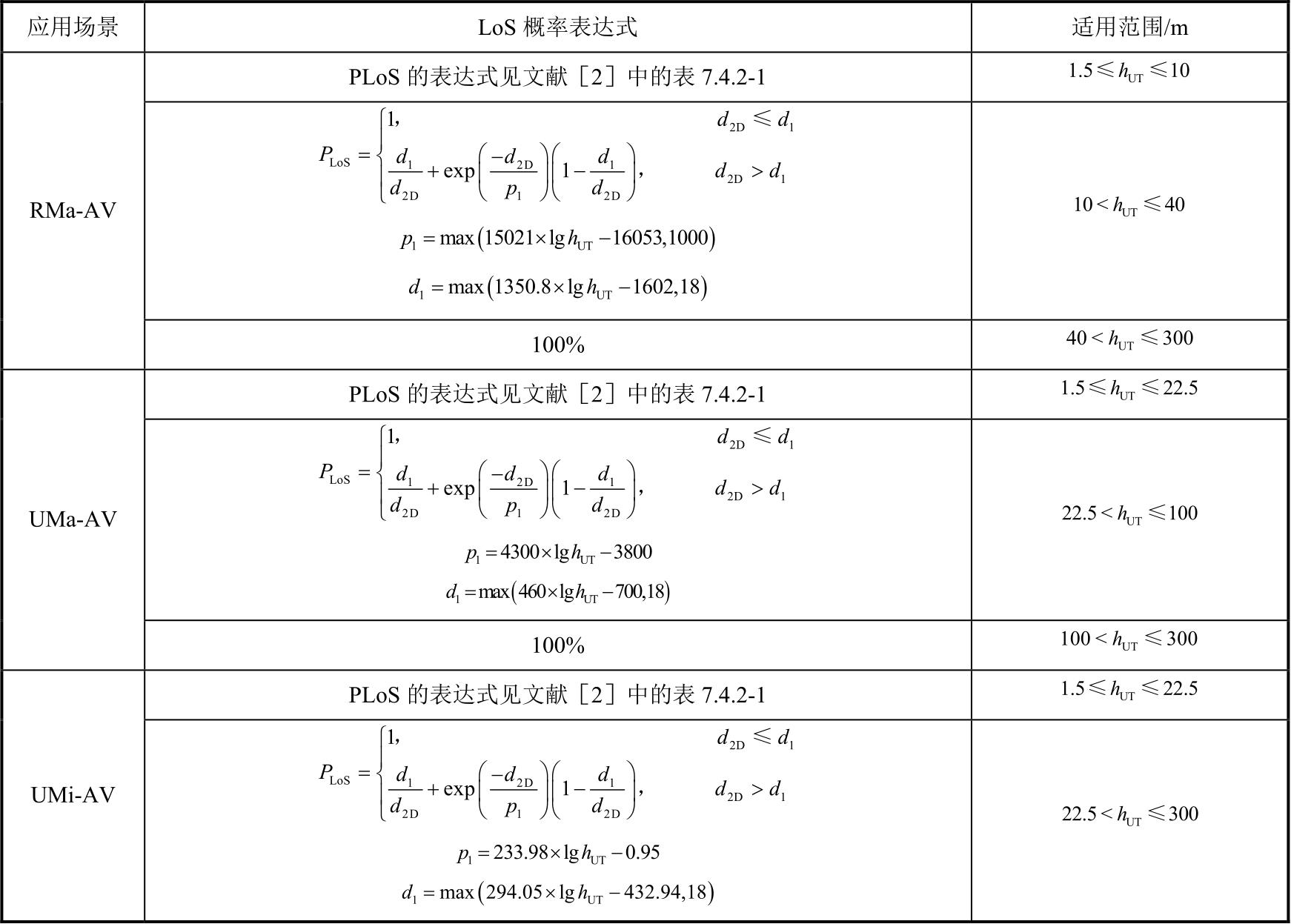
注:LoS概率表达式是在默认的天线高度下得到的,默认的天线高度分别为35m(RMa-AV)、25m(UMa-AV)、10m(UMi-AV); d 1 的单位是米。
本节介绍建议信道模型中的路径损耗。建议信道模型实际上是结合基于高度参数的信道模型和概率LoS信道模型来描述不同高度的无人机信号传播环境的。不同应用场景下的路径损耗表达式如表4-4所示,其中 d 3D 表示无人机到基站的实际空间距离。
表4-4 不同应用场景下的路径损耗表达式
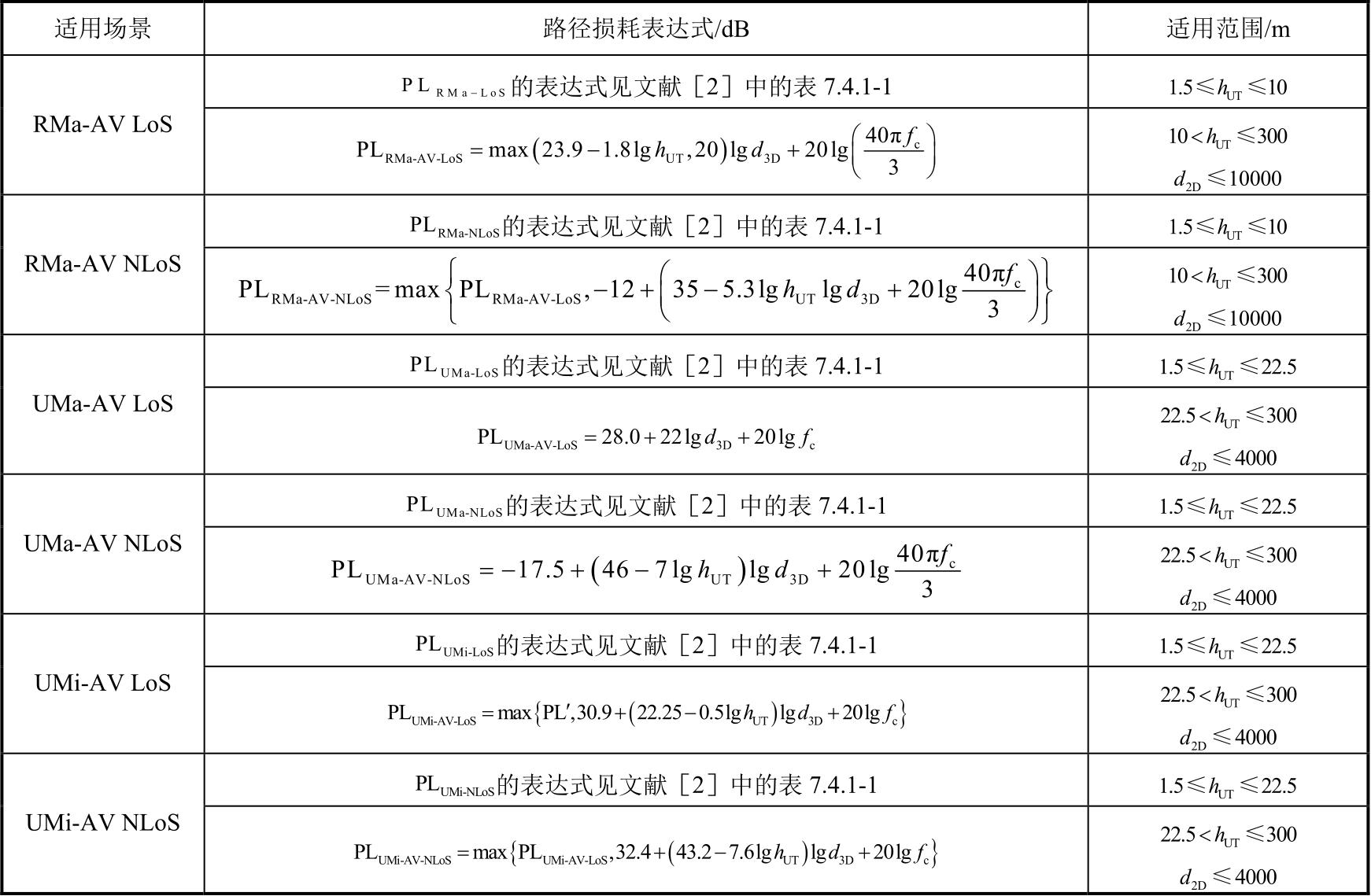
注:(1)对于UMa-AV LoS场景,当无人机的飞行高度为22.5m< h UT ≤300m且水平距离 d 2D ≤4km时,没有观测到断点距离;(2)PL RMa-AV-LoS 是在10m< h UT ≤300m和 d 2D ≤10km条件下RMa-AV LoS场景的路径损耗;(3)PL′表示自由空间路径损耗;(4)PL UMi-AV-LoS 是22.5m< h UT ≤300m和 d 2D ≤4km条件下UMi-AV Los场景的路径损耗。
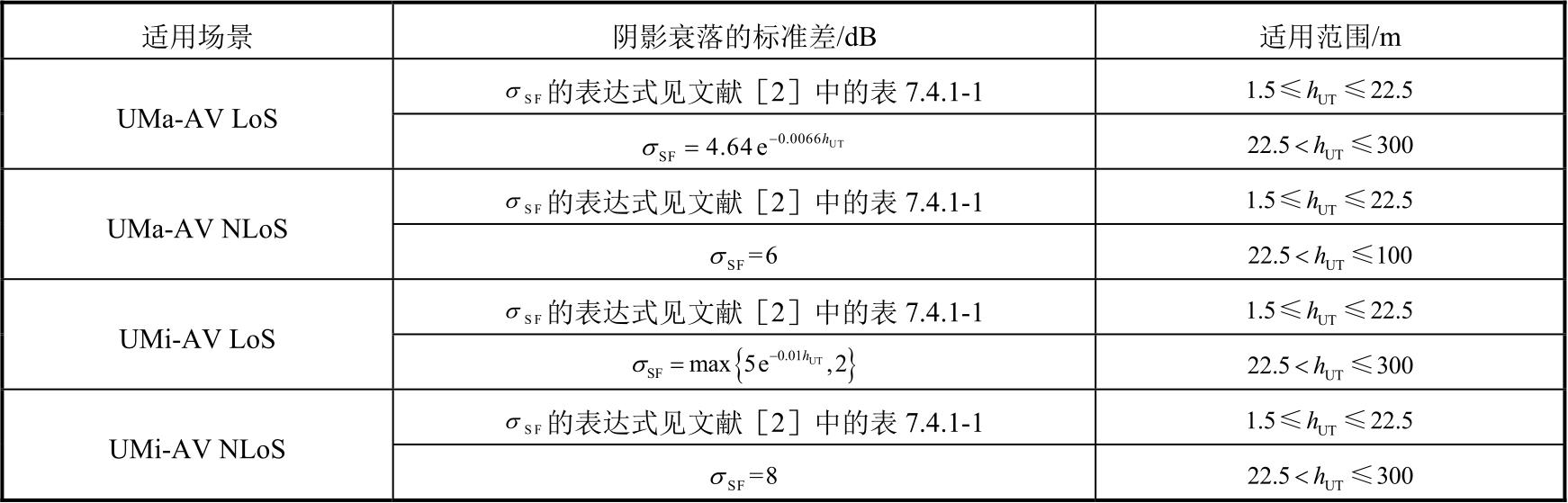
本节介绍建议信道模型中的阴影衰落模型。与路径损耗类似,建议信道模型实际上是结合基于高度参数的信道模型和概率LoS信道模型来描述不同高度的无人机信号传播环境的。不同应用场景下的阴影衰落表达式如表4-5所示。
表4-5 不同应用场景下的阴影衰落表达式

续表
对于1.5m≤ h UT ≤10m的RMa-AV场景、1.5m≤ h UT ≤22.5m的UMa-AV和UMi-AV场景,其快衰落可以参考文献[2]的7.5节;对于10m≤ h UT ≤300m的RMa-AV场景、22.5m≤ h UT ≤300m的UMa-AV和UMi-AV场景,3GPP给出了3种备选方案来评估基站的2发2收、无人机的1/2发2收的情况。
对于RMa-AV场景和UMa-AV场景,采用基于CDL-D的快衰落模型 [2] ,具体步骤如下:
(1)按照文献[2]中7.5节的步骤1~3完成用户放置、LoS/NLoS概率计算和路径损耗计算,LoS/NLoS概率计算和路径损耗计算可按照表4-3和表4-4和表4-5进行。
(2)按照文献[2]中7.7.1节的步骤1~4生成信道相关系数。
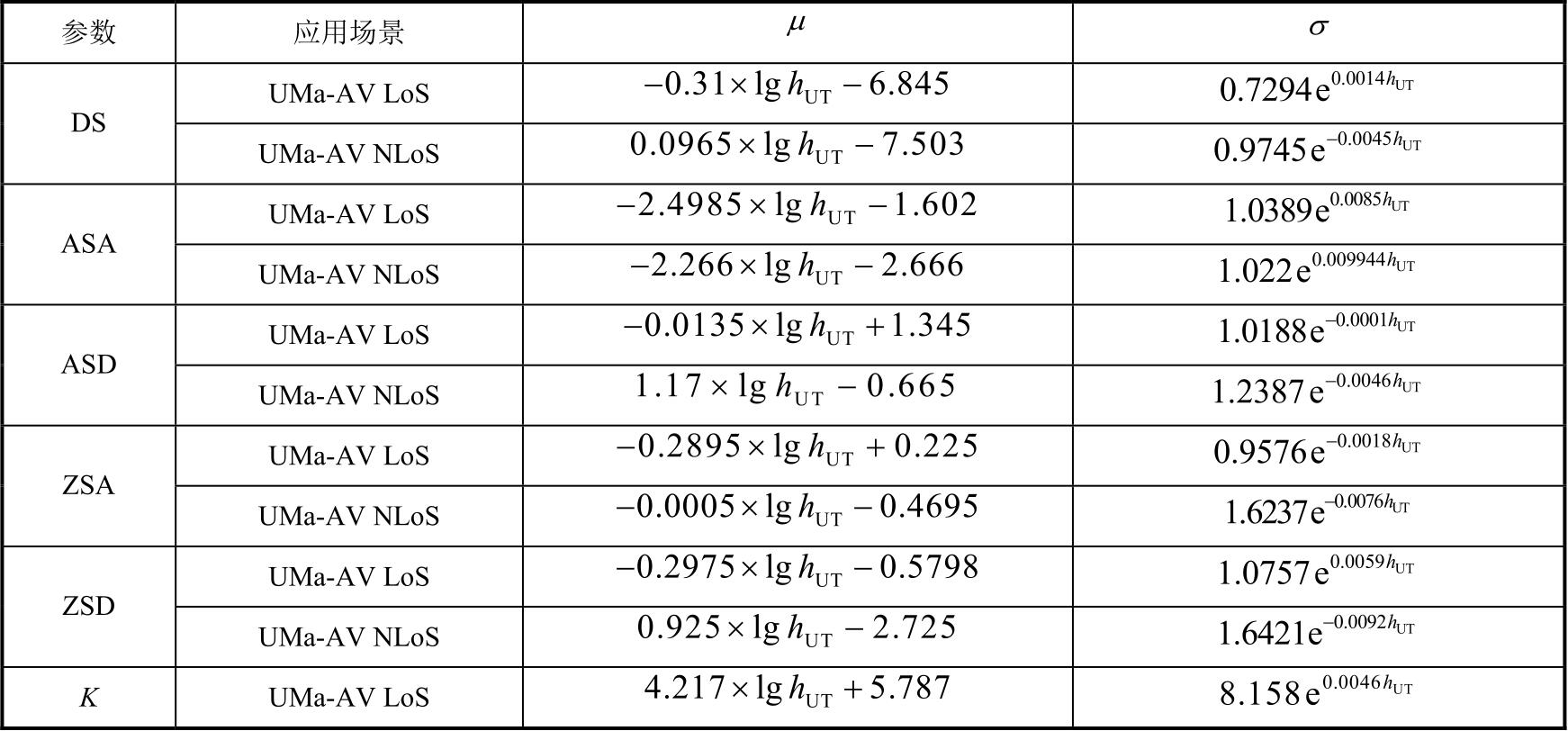
(3)根据文献[2]中7.7.1节,将无人机实际的AOA、AOD、ZOA和ZOD缩放为符合所需的均值ASA、ASD、ZSA和ZSD。对于RMa-AV和UMa-AV场景,其所需的角度扩展分别如表4-6和表4-7所示。
表4-6 RMa-AV场景的所需角度扩展、时延扩展和 K 参数

表4-7 UMa-AV场景的所需角度扩展、时延扩展和 K 参数

(4)根据文献[2]中7.7.6节,将CDL-D模型的 K 参数缩放为所需值。CDL-D模型的时延扩展可按照文献[2]中7.7.3节的规定,用所需时延扩展值进行缩放。表4-6和表4-7分别给出了RMa-AV和UMa-AV场景的所需的 K 参数和时延扩展值。
(5)对于LoS链路中的ZOD,在角度值缩放后,偏移角度仅添加到NLoS链路,即CDL-D中的所有拉普拉斯聚类。该偏移角由几何关系确定,假设RMa-AV场景在地面上以及UMa-AV在建筑物屋顶上都是镜面反射的,RMa-AV和UMa-AV场景的偏移角如图4-5和图4-6所示。
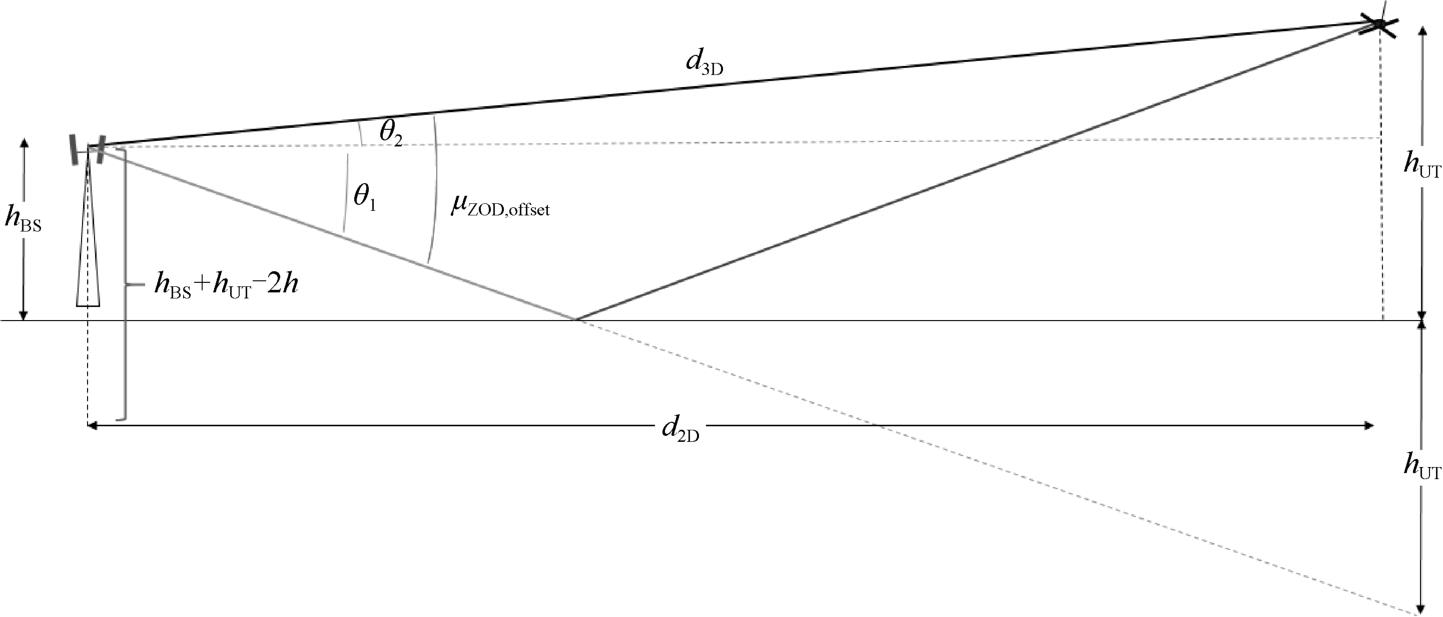
图4-5 RMa-AV场景的偏移角
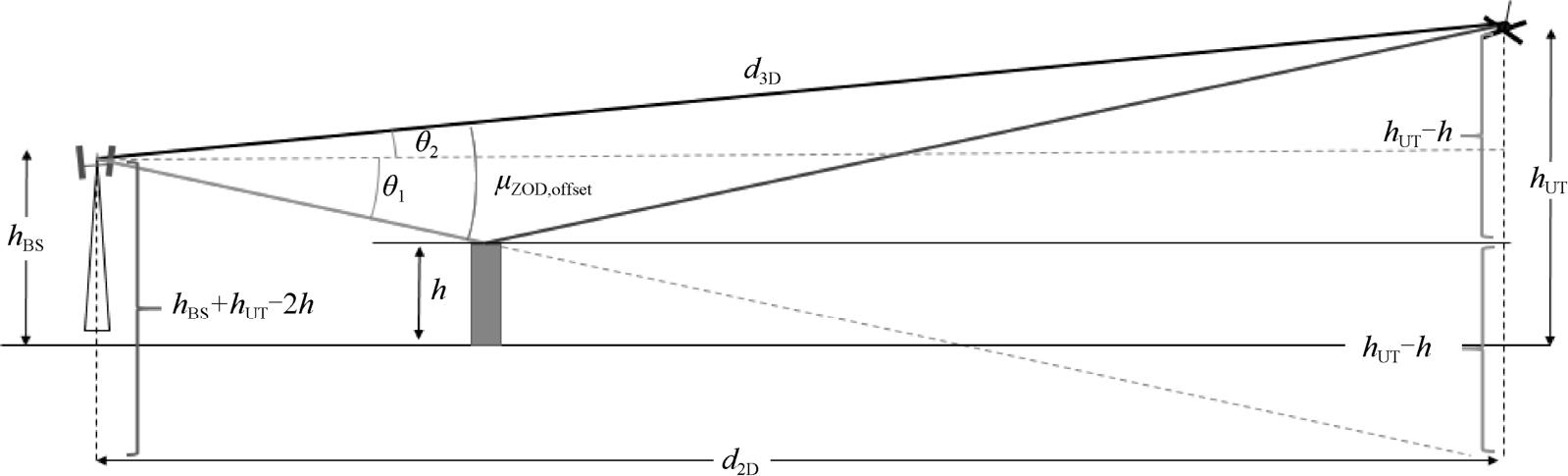
图4-6 UMa-AV场景的偏移角
RMa-AV和UMa-AV场景的偏移角分别为:

(6)对于NLoS链路中的ZOD,不论RMa-AV还是UMa-AV场景,偏移角均为0。
对于UMi-AV场景,在基站低于平均屋顶高度且无人机远高于平均屋顶高度的情况下,使用基于反向UMa场景的快衰落。在此方案中,交换基站和无人机用户的角度扩展,可以继续使用文献[2]中7.5节的快衰落。
对于RMa-AV和UMa-AV场景,通过修正DS、ASA、ASD、ZSA、ZSD、 K 参数,可以继续使用文献[2]中7.5节的快衰落,修正的参数如表4-8和表4-9所示。
表4-8 RMa-AV场景下修正的DS、ASA、ASD、ZSA、ZSD、 K 参数
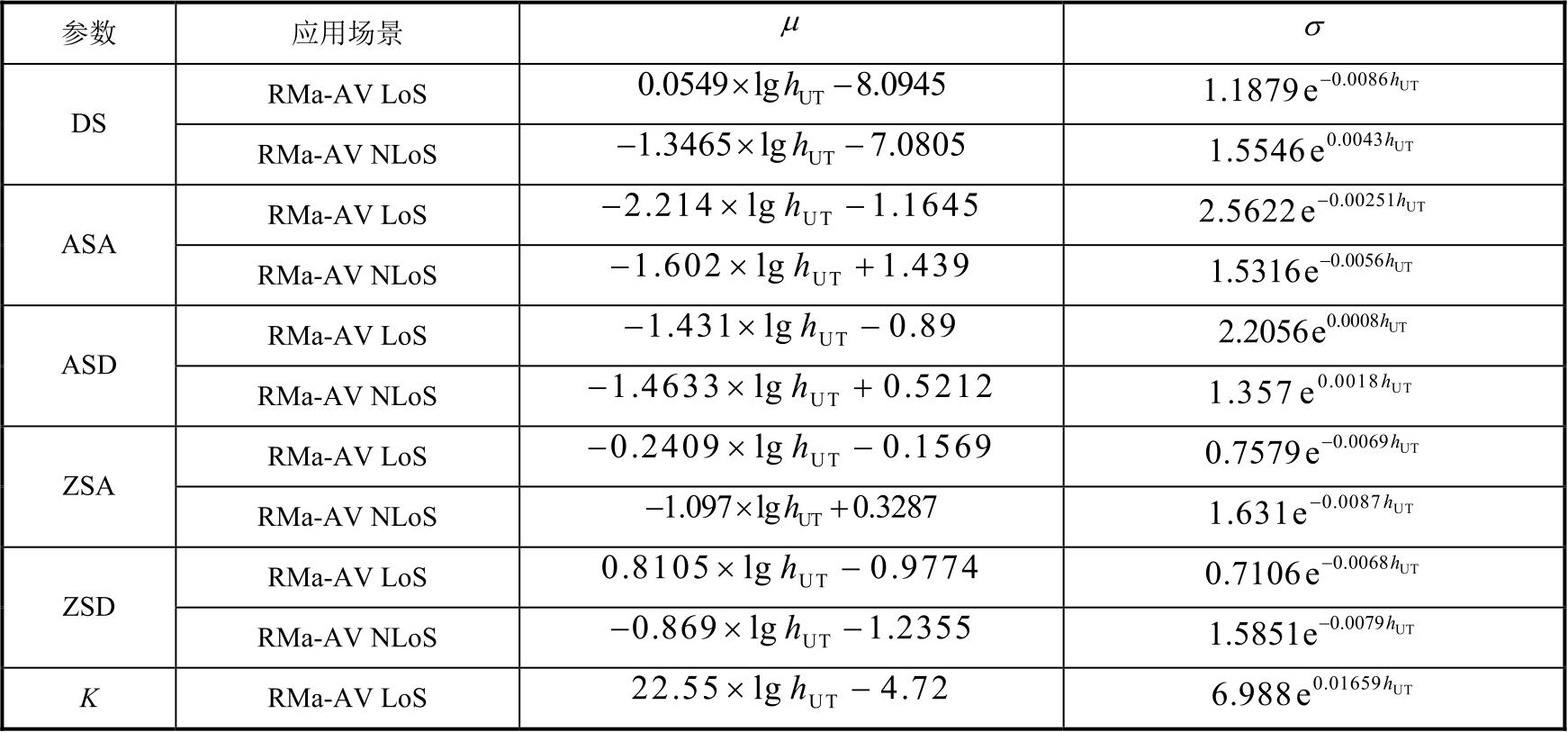
表4-9 UMa-AV场景下修正的DS、ASA、ASD、ZSA、ZSD、 K 参数
对于UMi-AV场景,根据文献[3]修正DS、ASA、ASD、ZSA、ZSD、 K 参数,可以继续使用文献[2]中7.5节的快衰落。
将 K 参数设置为15dB,其他参数保持不变,则文献[2]中7.5节的快衰落适用于全部的场景。