下载掌阅APP,畅读海量书库
立即打开



相对于手机等移动终端,无人机更加容易受到恶意干扰。如何保障通信的安全性在实际场景中具有重要意义,抗干扰技术对无人机通信网络尤其重要,已有一些文献提出了一些常用抗干扰方法。
通信系统中常用的抗干扰方法有直接序列扩频和跳频。经过直接序列扩频处理后,信道在频域上有极低的频谱密度,不易被干扰节点发现。同时,直接序列扩频信号具有抗窄带干扰的先天优势。文献 [19] 在无人机通信网络中使用直接序列扩频(直扩)抗干扰。文献 [20] 提出了一种相位调制控制信号的直扩保护方法来提高无人机通信网络的抗干扰能力。文献 [21] 提出了一种无人机通信网络跳频方法,该方法利用抽取滤波器组进行自适应跳频,并通过半实物仿真验证该方法的性能。
上述的抗干扰方法均是在干扰先验信息未知的条件下而设计的。随着认知技术的成熟,无人机通信网络能够对其周围的环境进行深入认知。认知技术能够使抗干扰方法从被动变为主动,可以通过认知干扰节点的行为来采取有效的抗干扰方法。还有一些文献对认知无人机通信网络抗干扰方法进行了深入研究。认知技术能够使无人机通信网络获取周围环境的有用信息,增加抗干扰方法的灵活性。目前已有部分结合认知技术与跳频抗干扰方法的研究成果。文献 [22] 提出了使用认知跳频方法来解决频谱资源匮乏问题,提高了无人机通信网络的抗干扰能力。文献 [23] 给出了一种高性能认知跳频序列的产生方法。但目前的认知跳频研究成果主要针对地面通信系统,认知无人机通信网络具有高速运动、网络协同、对干扰理解更加深入(环境认知获得更多干扰信息)等特点,为抗干扰方法的研究提供了更多潜力。
认知无人机通信网络是一个崭新的领域,潜在的抗干扰方法有很多,具体来说,可以从干扰无法避让及干扰避让两个方面进行调研。基于干扰避让的无人机通信网络示意图如图3-10所示。
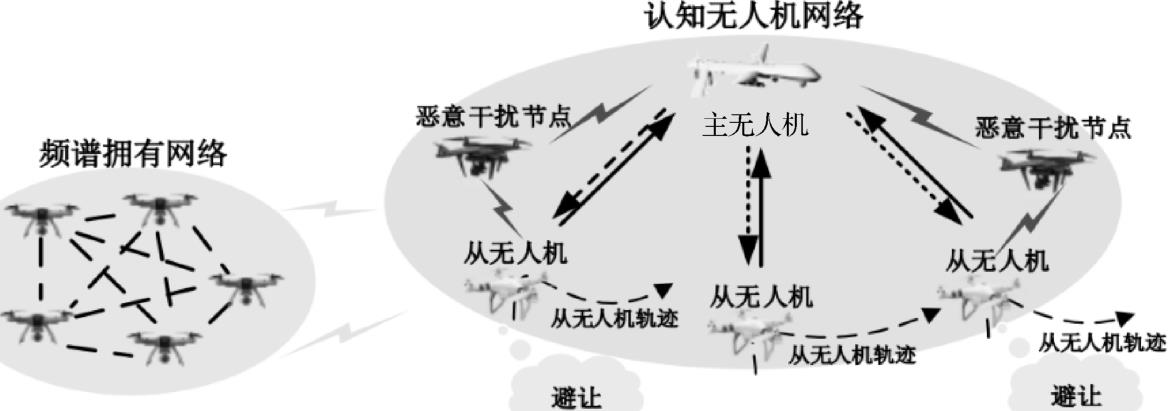
图3-10 基于干扰避让的无人机通信网络示意图
针对干扰无法避让的情况,在无法获得足够认知信息或者在全频带实施干扰的情况下,认知无人机通信网络通常无法通过避让干扰来获得更加高质量的频谱,导致通信信道恶化而影响通信性能。利用无速率编码能够降低信道恶化对通信性能的影响,无速率编码允许数据包乱序到达接收端。文献 [24] 提出了一种可实现的无速率编码,即Luby Transform码。文献 [25-26] 提出了无速率多址接入思想,分别在删除信道和噪声信道中将无速率编码引入移动数据上行链路。文献[27]采用仿真的手段验证了在无人机通信网络中使用无速率编码传输数据的有效性。
针对干扰避让的情况,认知无人机通信网络的高速运动特征使其能够在空间中躲避干扰攻击。关于无人机躲避障碍物/碰撞方面的研究较多。一类方法是图搜索算法,文献 [28] 研究了在多架无人机场景下的最短路径规划和避障。文献 [29] 先采用随机图存储无碰撞结构的点和可行路径,然后在图中搜索目标节点之间的可行路径。文献 [30] 提出了另一类方法,即人工势场法。人工势场法将目标节点看成引力场、将障碍物看成斥力场,无人机在场内移动时被目标节点吸引、被障碍物排斥,从而可以使无人机沿着无碰撞的路径到达目标节点。关于无人机在恶意干扰情况下主动避让干扰而达到无人机通信网络资源高效利用的问题,可以借鉴无人机躲避障碍物/碰撞的思想和方法。但两者有较大的差别:一方面,无人机躲避障碍物/碰撞主要关注可行路径的寻找与规划,而干扰避让的目标是使无人机通信网络的容量等性能达到最大化;另一方面,恶意干扰节点很有可能会随着无人机通信网络的避让而改变自身的干扰位置及策略,无人机躲避障碍物/碰撞一般不属于这种情况。因此,无人机躲避障碍物/碰撞的方法不能直接用于无人机通信网络的抗干扰。除了对干扰节点的空间位置进行避让,还可以对干扰频段等进行避让。文献 [31] 在多信道环境下通过切换信道来躲避干扰,将抗干扰问题建模为随机博弈模型,进而采用Q学习的方法进行求解。文献 [32] 分析了在干扰方的观测存在误差情况下的干扰对抗功率分配博弈。文献 [33] 进一步提出干扰存在观测误差情况下的分层功率控制算法。文献 [34] 从干扰频段避让和干扰位置避让两个角度,构建了基于深度Q学习网络的双维度抗干扰模型。