下载掌阅APP,畅读海量书库
立即打开



基于自制的仿生偏振光罗盘,分别开展了静态、转台和无人机机载定向测试。静态和转台试验相关测试设备包括:自制仿生偏振光罗盘、TBR100三轴转台(卓立汉光公司,定向精度优于0.05°)、转台控制器、高精度光纤陀螺惯性导航系统/全球卫星导航系统(FOG-INS/GNSS)/组合导航系统(IMU-KVH 1750/加拿大NovAtel PW7720)、电脑、供电电源等。静态及转台试验设备如图2.9所示,静态试验过程中转台始终保持不动。
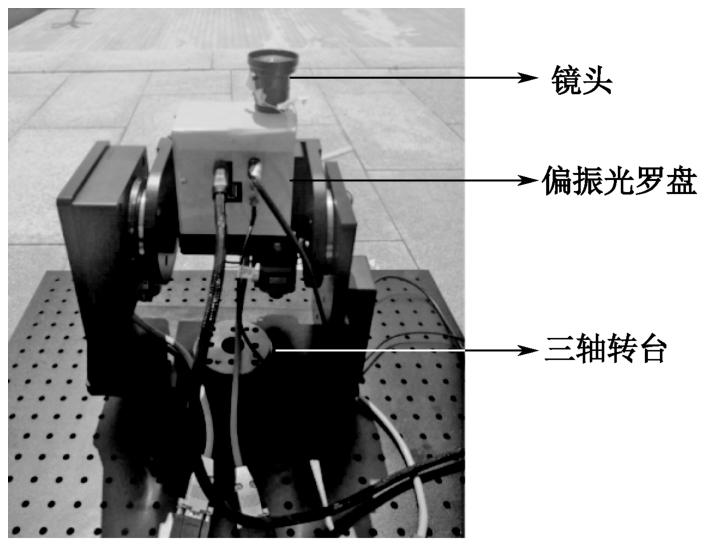
图2.9 静态及转台试验设备
机载试验相关测试设备包括:六旋翼无人机(最大载重:15kg;机型:六旋翼SLM-6S;飞行续航时间:20分钟),以及上述静态试验所使用的自制偏振光罗盘、FOG-INS/GNSS测量基准系统。无人机试验设备如图2.10所示。

图2.10 无人机试验设备
将自制仿生偏振光罗盘和高精度FOG-INS/GNSS组合导航基准搭载于TBR100三轴转台和六旋翼SLM-6S无人机上,考虑安装误差对解算精度的影响,在解算过程中进行安装误差补偿。利用基于太阳子午线的偏振定向方法,对载体航向角信息进行解算,并与高精度FOG-INS/GNSS组合导航基准测量结果进行比较,对本书研制的仿生偏振光罗盘定向精度进行验证。仿生偏振光罗盘定向试验平台结构及试验方案如图2.11所示。
定向试验平台可分为4层:第一层为自制仿生偏振光罗盘与FOG-INS/GNSS组合导航基准组成的航向信息采集装置;第二层为平台系统的信号处理和控制中心,可以完成的功能包括导航数据采集、控制载体转台运动、通过无线方式与地面管理计算机系统进行通信与数据传输;第三层为平台系统的静止/移动载体,采用转台/无人机机载形式分别进行静态/动态试验,静态试验时,转台保持不动;第四层为地面控制系统,负责发送平台系统的控制指令与存储试验数据。
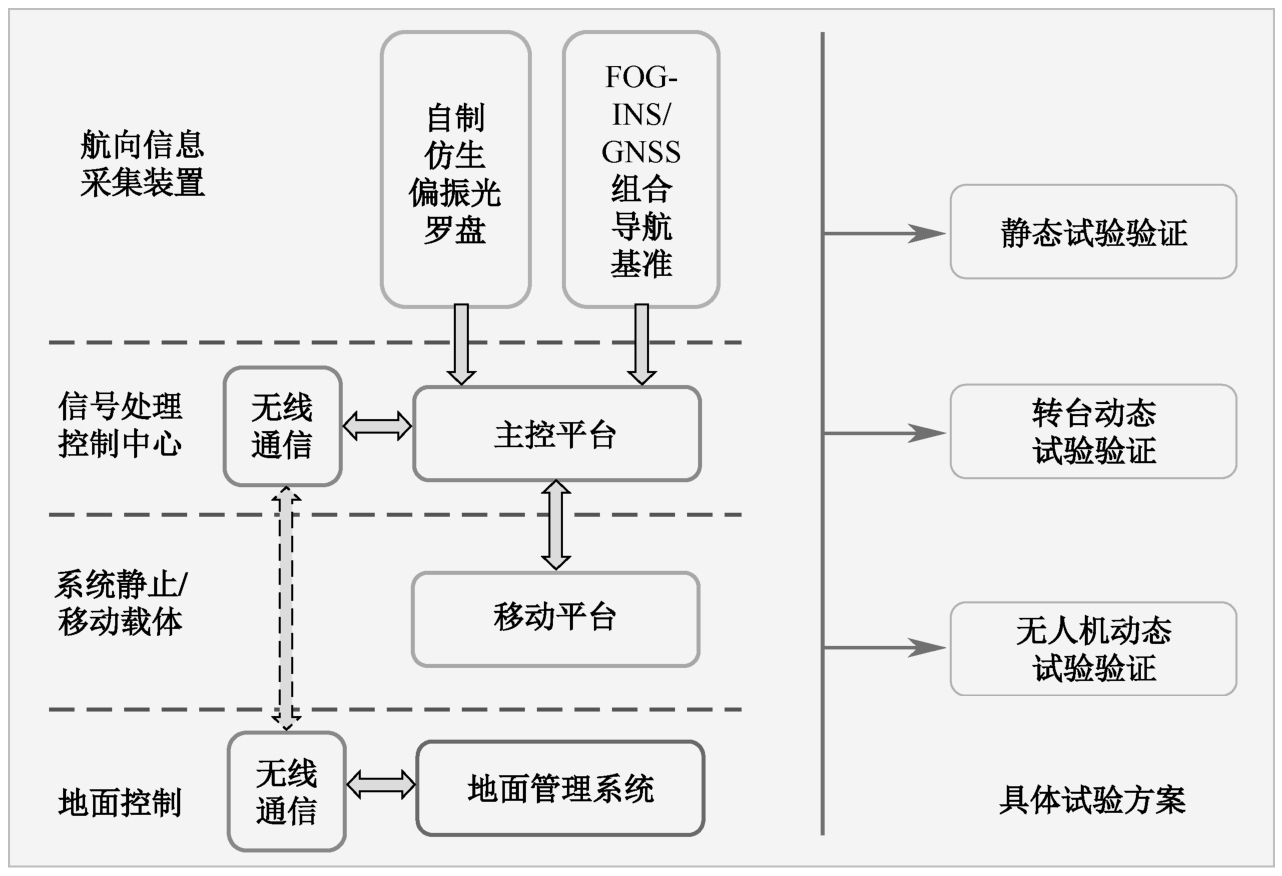
图2.11 仿生偏振光罗盘定向试验平台结构及试验方案
分别使用平均绝对误差(MAE)、标准差(SD)、均方根误差(RMSE)和不确定度(UC)4个典型指标来评估自制仿生偏振光罗盘的定向性能。
假设罗盘输出一个时间步长为 t 的时序 N =( n 1 , n 2 ,…, n t )。平均绝对误差(MAE)用来估计该罗盘输出的所有单个观测值与算术平均值偏差的平均绝对值,它可避免误差相互抵消,因此可准确反映实际预测误差的大小。其数学表达式为:

其中,
h
t
和
 分别是时间步长
t
处的观测值和模拟值。
分别是时间步长
t
处的观测值和模拟值。
标准差(SD)用于衡量一组数据集内每个数据自身的离散程度。SD越大,说明该数据集内的数据与该数据集均值之间差异越大;反之,SD越小,说明该数据集内的数据越接近该数据集均值。其数学表达式为:

其中
 是时间步长
t
内观测值的平均值。
是时间步长
t
内观测值的平均值。
均方根误差(RMSE)用于衡量预测值
 与真值
h
t
之间的偏差。RMSE越接近于零,说明该罗盘误差越小,预测的航向信息越准确。其数学表达式为:
与真值
h
t
之间的偏差。RMSE越接近于零,说明该罗盘误差越小,预测的航向信息越准确。其数学表达式为:

不确定度(UA)是用于衡量测量结果质量的指标,它是指由于测量误差的存在,对被测量值不能肯定的程度,也就是被测量结果的可信赖程度。UC越小,说明测量结果越准确,数据的可使用价值越高;反之,数据可靠性越低,数据的可使用价值越低。不确定度有A类不确定度(UA)、B类不确定度(UB)及合成不确定度(UC)三类。其中,UA是采用对观测值进行统计分析的方法来评定的一种标准不确定度;UB是采用不同于UA的方法来评定的标准不确定度;UC是当测量结果是由若干个其他量的值求得时,按其他各量方差和协方差计算所得的标准不确定度。本书采用A类不确定度(UA)计算,其数学表达式为:

静态定向试验结果如图2.12和表2.1所示。图2.12(a)中虚线是仿生偏振光罗盘静态输出的原始航向角数据,实线是FOG-INS/GNSS组合导航基准输出的航向角数据;图2.12(b)显示的是静态试验条件下仿生偏振光罗盘航向角误差曲线,其静态定向精度为0.1118°(RMSE)。
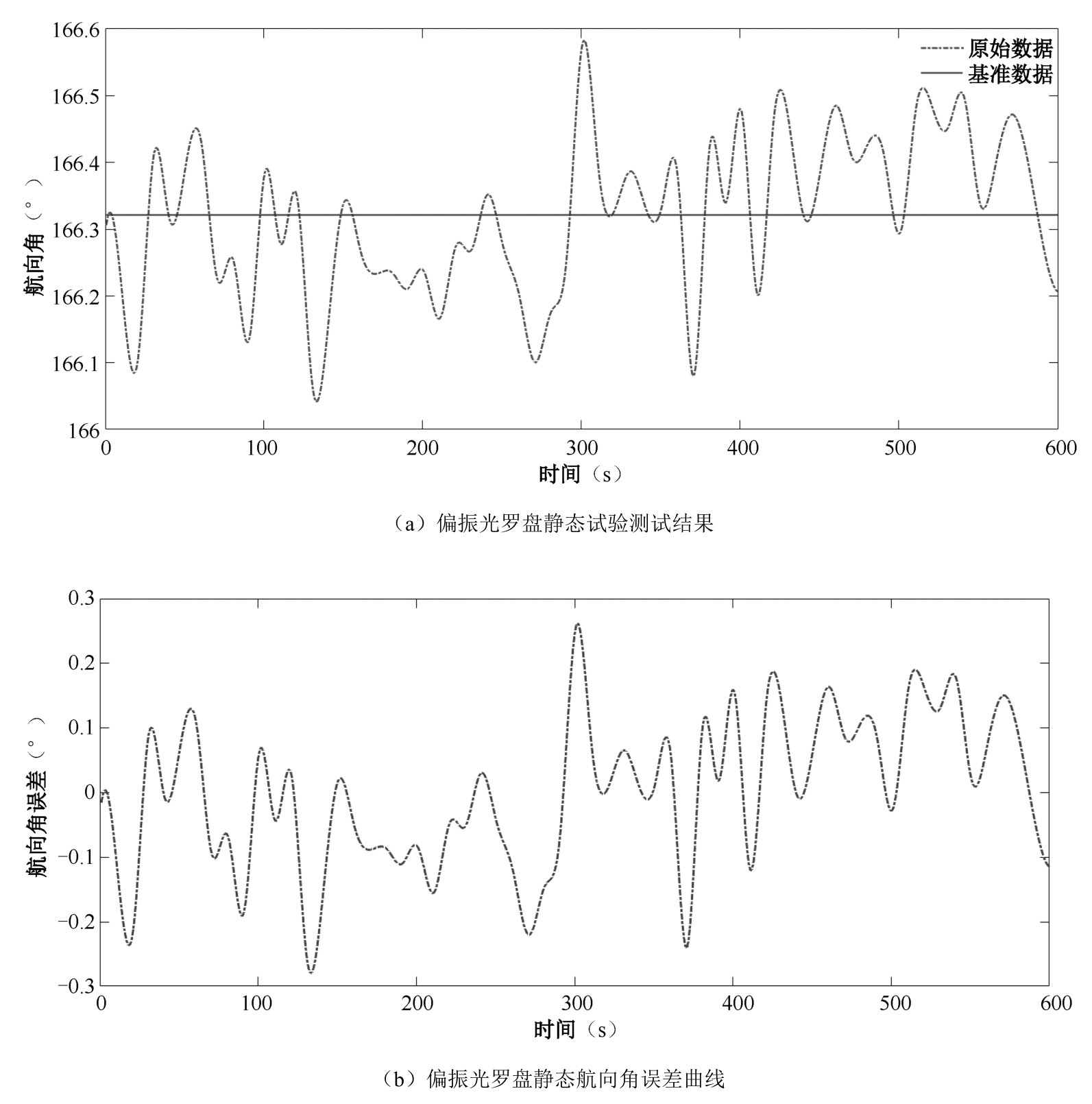
图2.12 静态定向试验结果
表2.1 静态定向试验罗盘获得的航向角误差指标值

转台动态定向试验设备同上述静态定向试验设备,在整个试验过程中,转台的转动角度为0°~120°,试验结果如图2.13和表2.2所示。图2.13(a)虚线是仿生偏振光罗盘转台动态输出航向角数据,实线是FOG-INS/GNSS组合导航基准转台动态输出航向角数据;图2.13(b)显示的是转台动态试验条件下仿生偏振光罗盘航向角误差曲线,其定向精度为0.2081°(RMSE)。
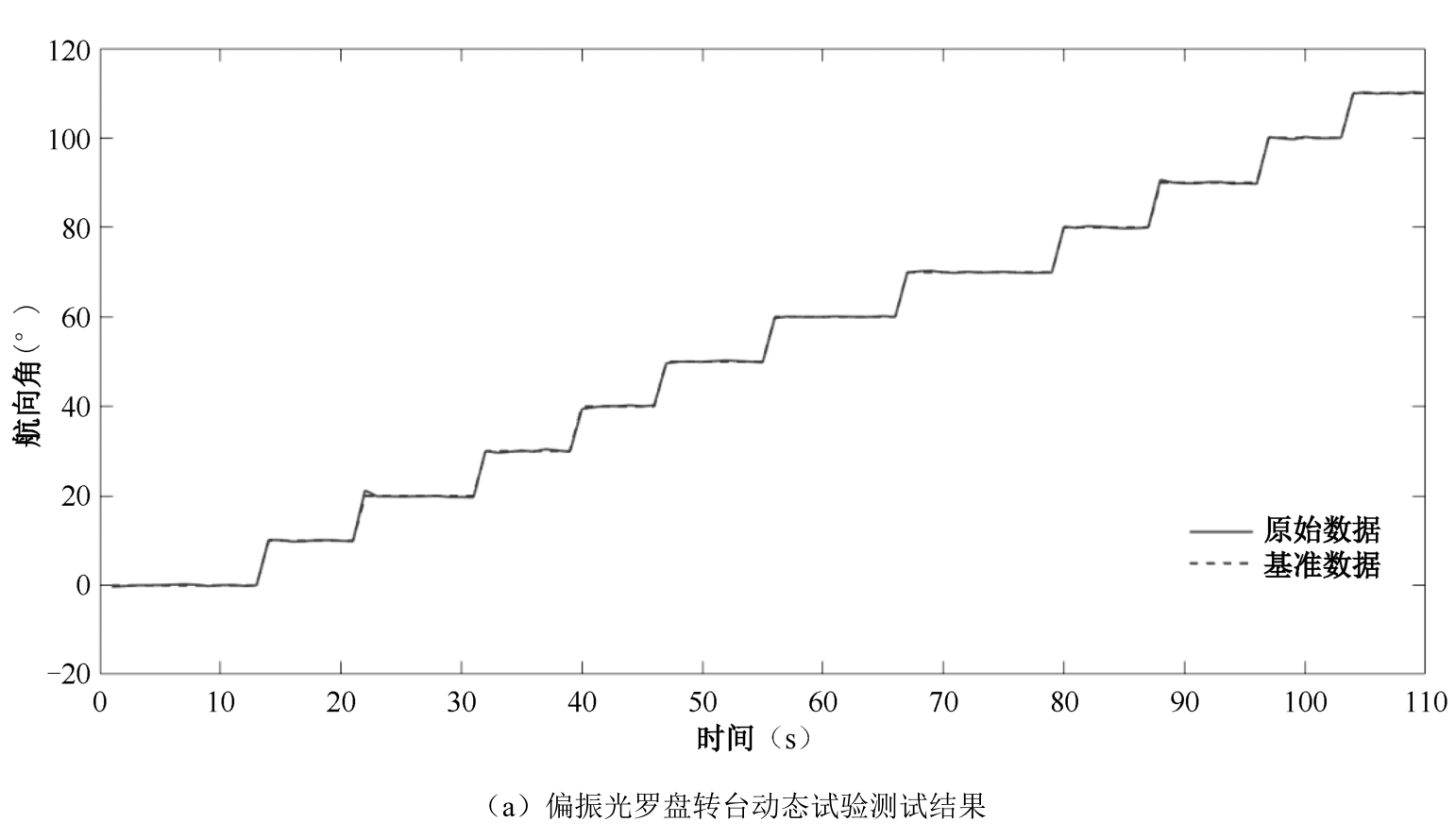
图2.13 转台动态定向试验结果
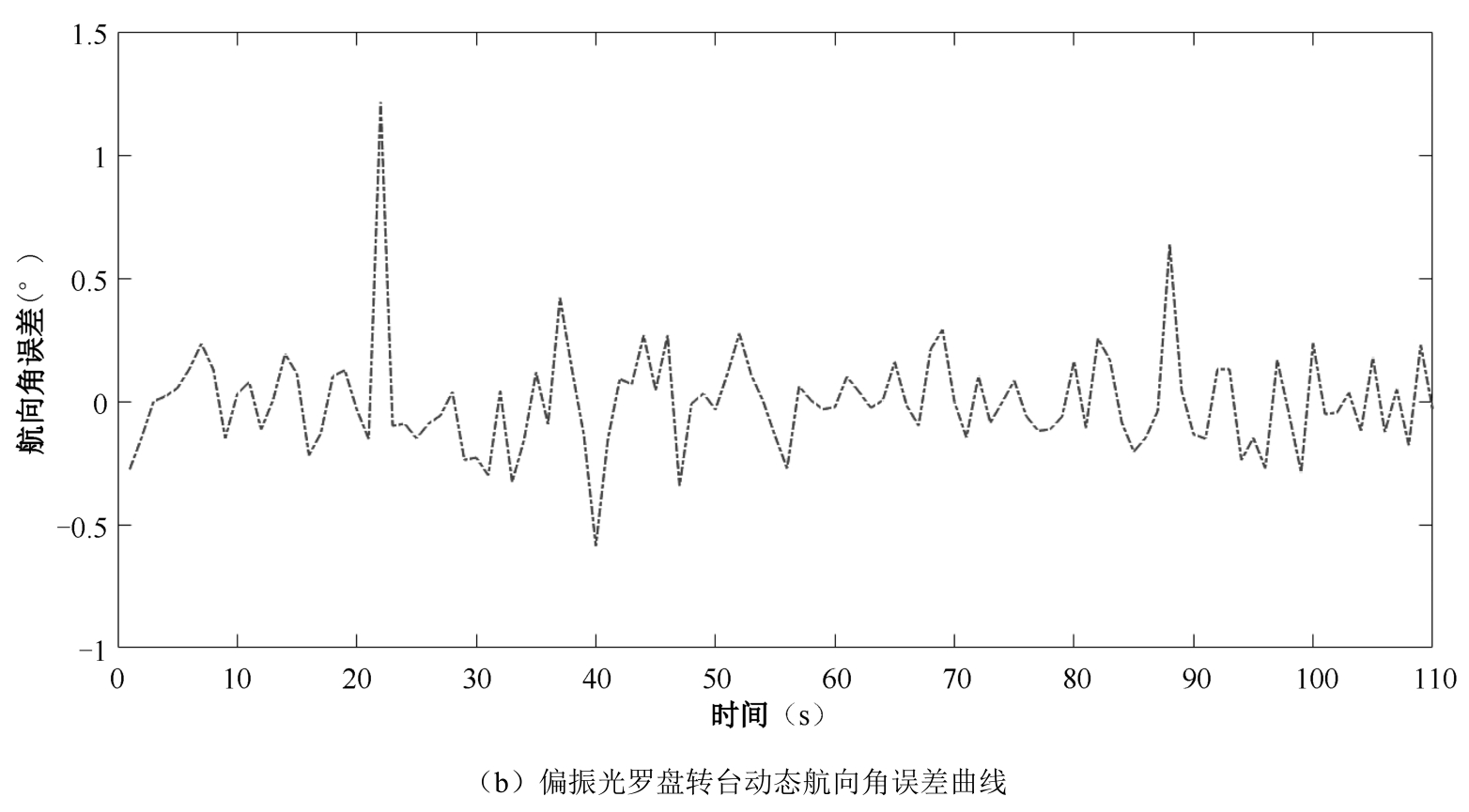
图2.13 转台动态定向试验结果(续)
表2.2 转台动态试验罗盘获得航向角误差指标值

无人机机载动态试验于2020年11月12日日落时分(16:10—17:30)在中北大学校园进行。在机载过程中,无人机对地飞行高度310m、飞行距离500m,飞行轨迹如图2.14所示。
无人机机载动态试验结果如图2.15和表2.3所示,图2.15(a)中虚线是仿生偏振光罗盘输出的无人机动态航向角数据,实线是FOG-INS/GNSS组合导航基准输出的无人机动态航向角数据,图中的尖峰表示无人机飞行过程转弯时,罗盘航向角发生明显变化;图2.15(b)显示的是仿生偏振光罗盘在无人机机载动态试验条件下航向角误差曲线,其动态定向精度为1.0900°(RMSE)。

图2.14 无人机飞行轨迹
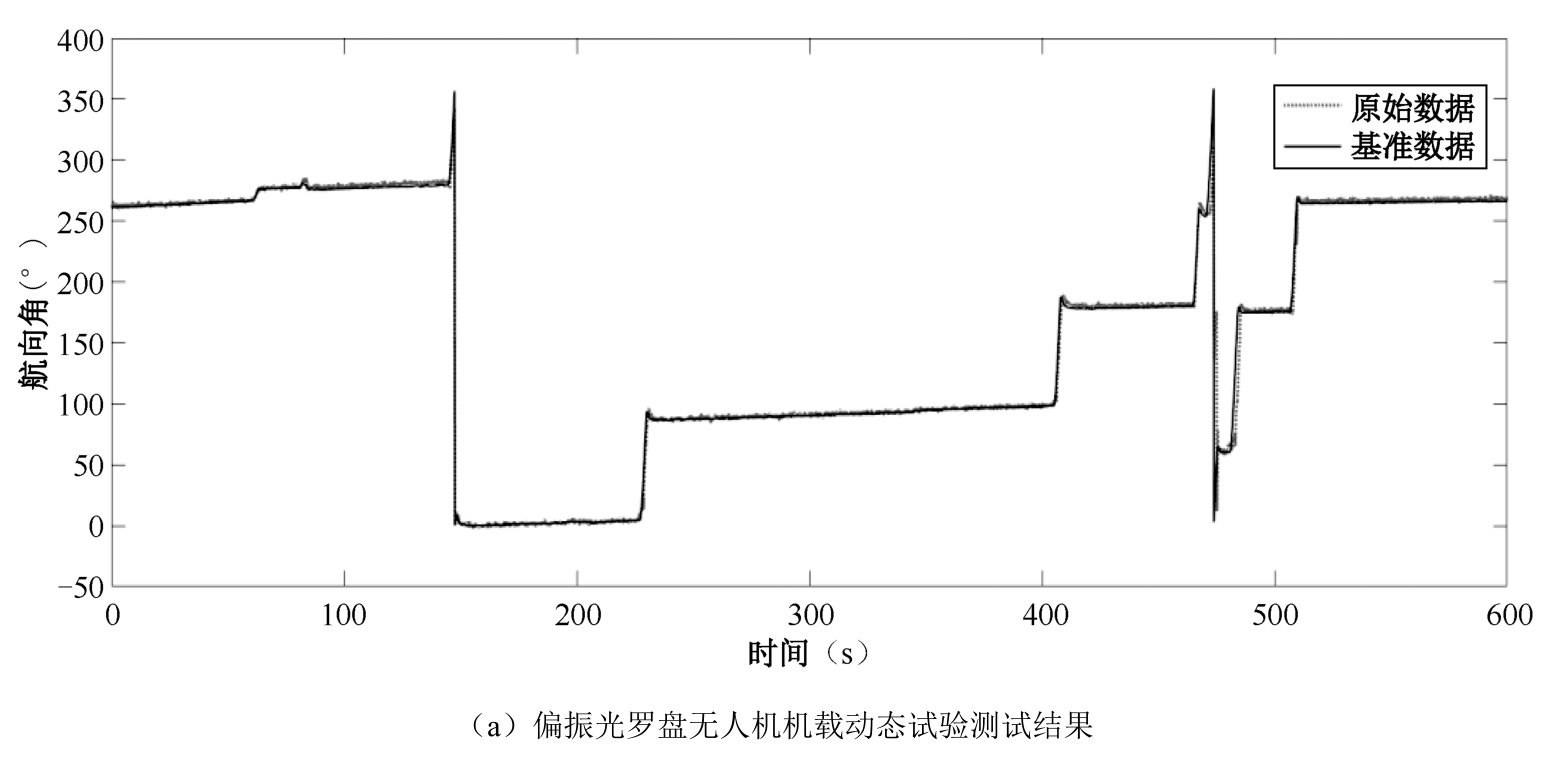
图2.15 无人机机载动态试验结果
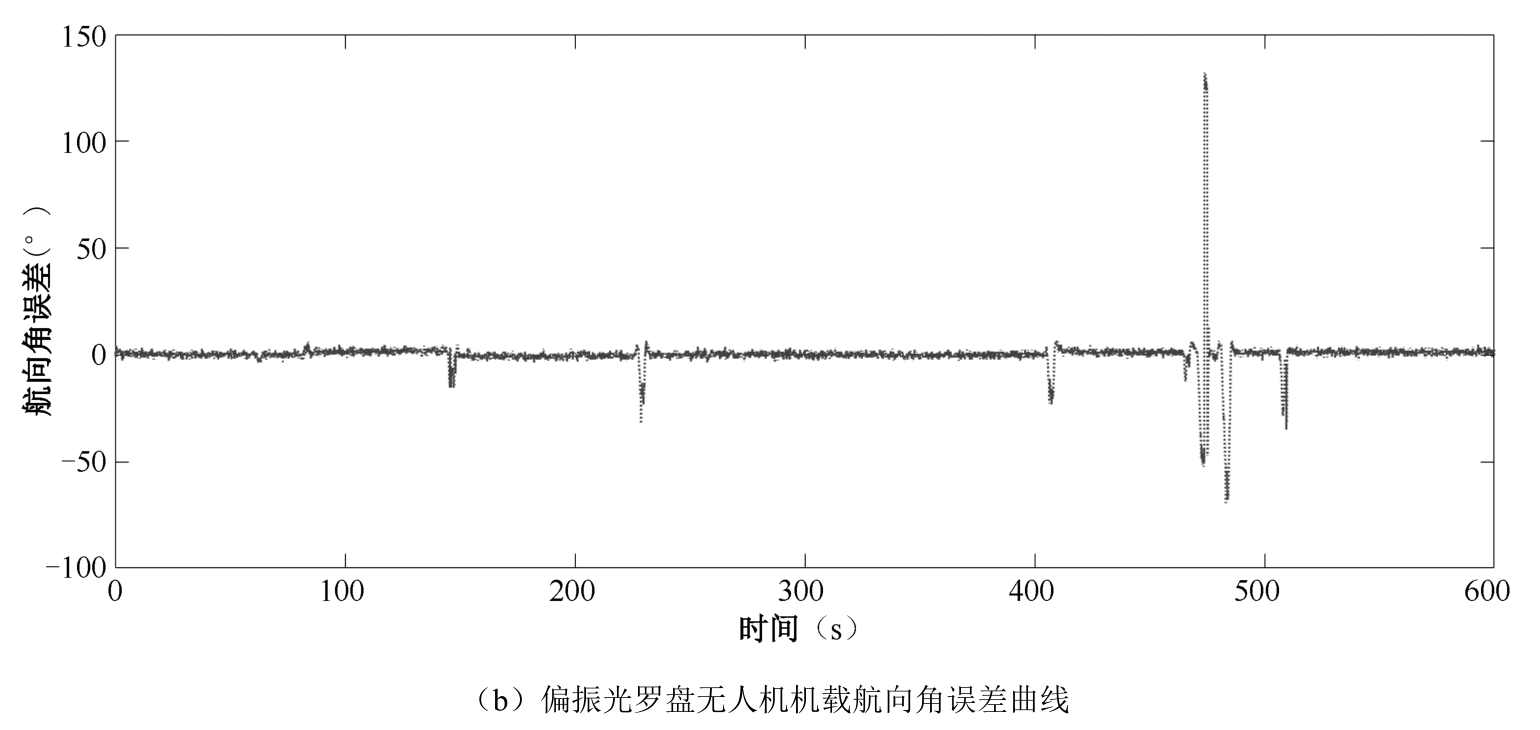
图2.15 无人机机载动态试验结果(续)
表2.3 仿生偏振光罗盘在无人机机载测试中获得的航向角误差指标值

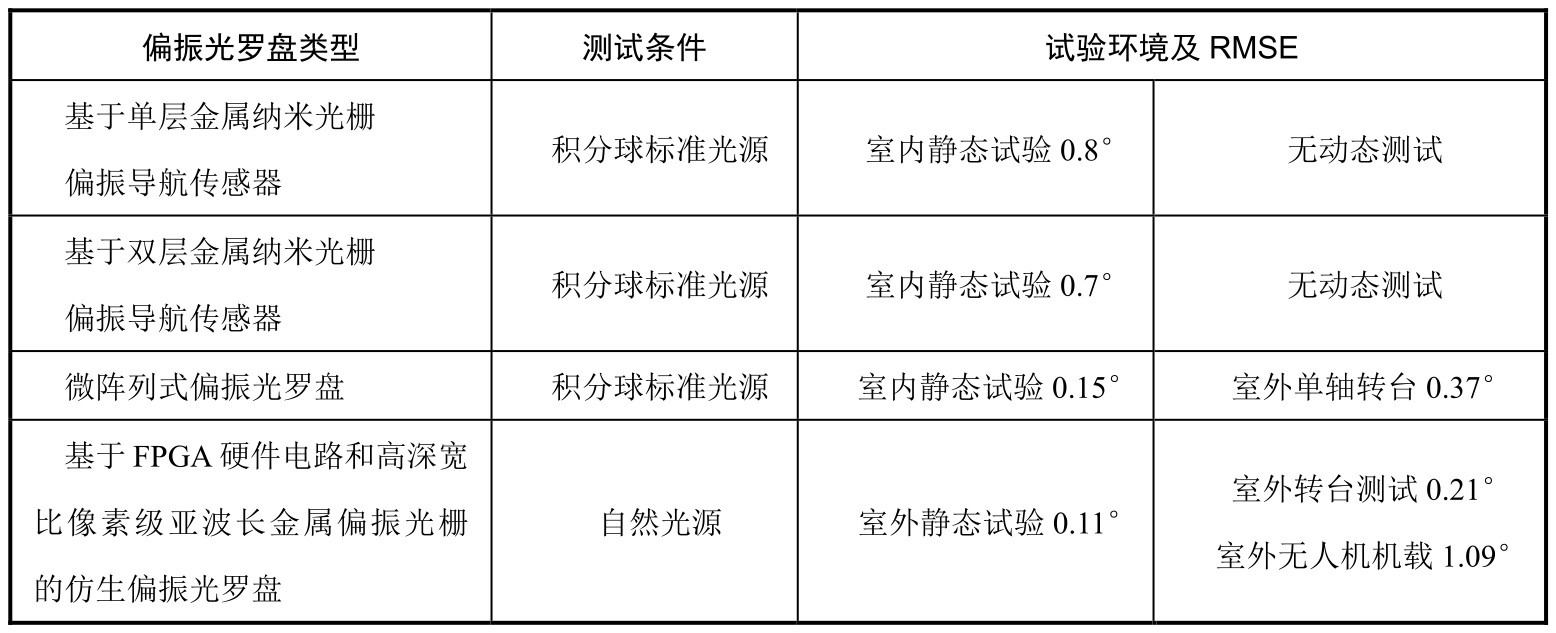
在定向精度上,基于FPGA硬件电路和高深宽比像素级亚波长金属偏振光栅的仿生偏振光罗盘,与现有典型偏振光罗盘偏振导航传感器样机、微阵列式偏振光罗盘等对比,结果如表2.4所示。
表2.4 现有典型偏振光罗盘定向精度对比结果