
下载掌阅APP,畅读海量书库
立即打开



理想条件下,大气偏振模式的偏振角图像具有类似“∞”字形的显著特征分布,这种分布模式不仅能够有效反映天空光大气偏振模式的特征变化,而且可以为基于大气偏振模式的自主定向方法研究提供基础,天空大气偏振光分布特性如图2.1所示。在大气偏振光分布模式中,重要特征之一是中性点。中性点是指天空太阳光受大气层内气溶胶等大颗粒粒子对大气偏振模式产生消偏作用,而在该分布模式中形成的天空偏振奇点 [70] 。中性点也是天空大气偏振模式的“窗口”,因此,为获取准确、有价值的目标特征,可利用中性点进行遥感目标探测;另外,由于中性点分布具有显著的方位信息特征,非常适合作为基于大气偏振模式的偏振光导航的参考,并为偏振光导航提供准确的方向基准 [70] 。
在这里,像素化亚波长金属偏振光栅偏振方向分别设定为0°、45°、90°和135°。大气偏振模式的特征可以用斯托克斯矢量(Stokes矢量) S =( I 、 Q 、 U 、 V )来表达,其中, I 表示偏振传感器2×2像素附近所有像素(共4个)的总光强度。 Q 与 U 分别表示0°与90°方向、45°与135°方向的线偏振光分量, V 表示圆偏振光分量。由于自然界中几乎没有圆偏振分量,因此被忽略。
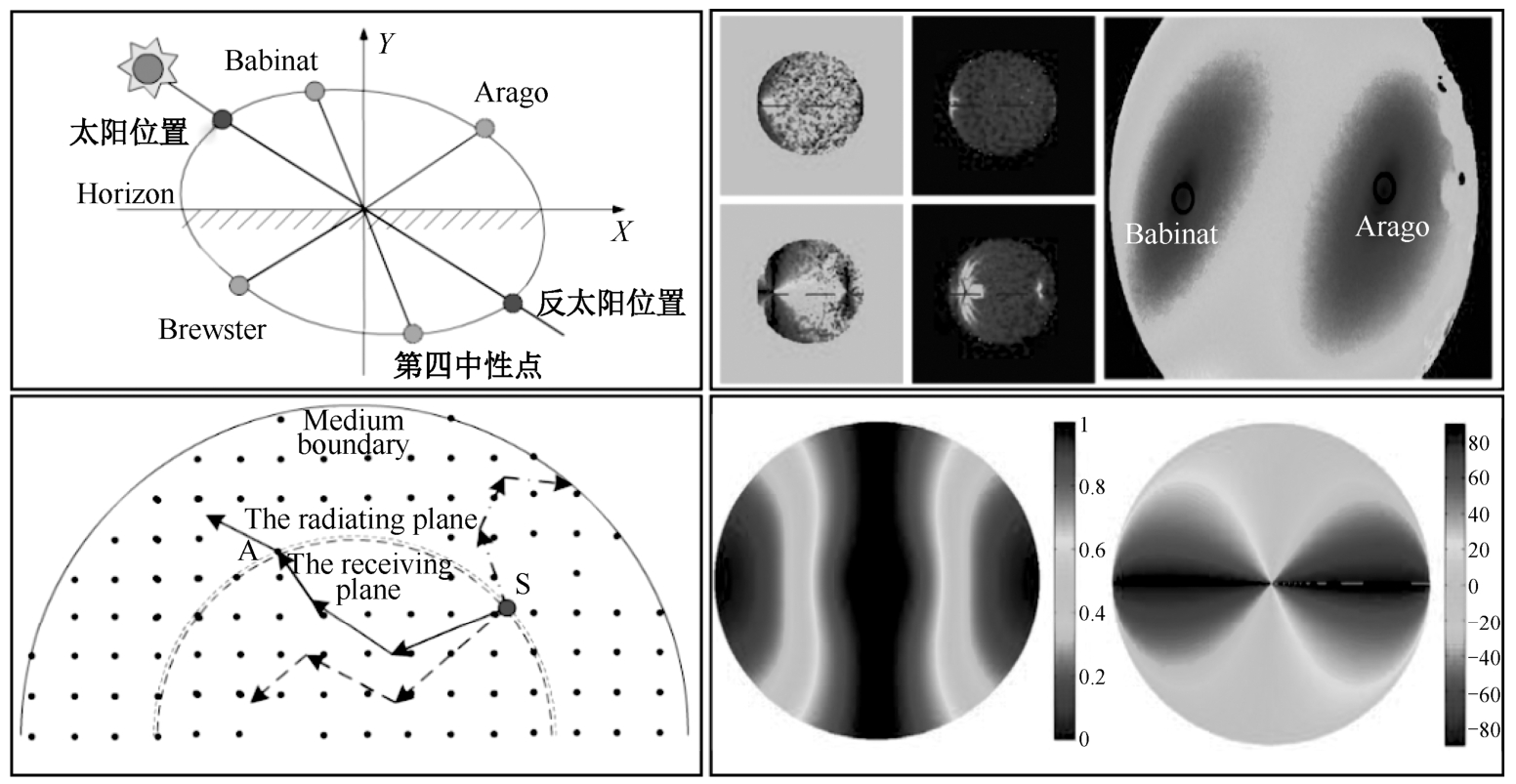
图2.1 天空大气偏振光分布特性
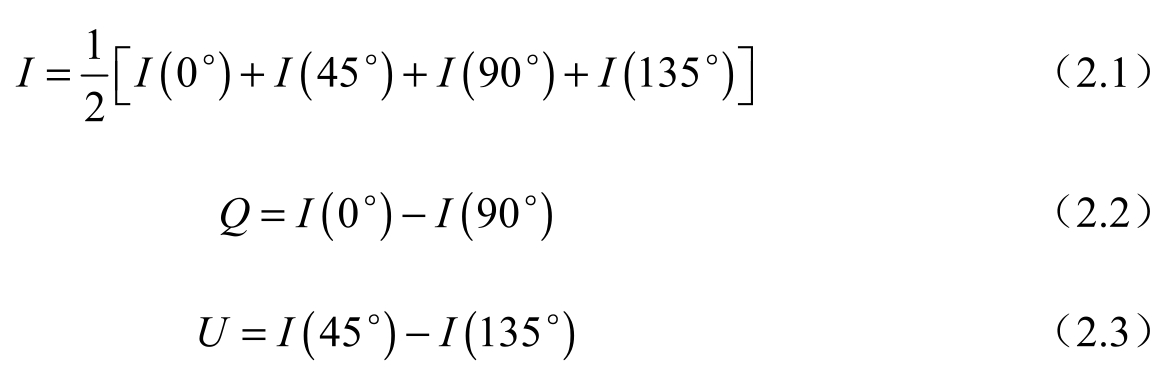
由上可得,偏振度(DoP,Degree of Polarization)和偏振角(AoP,Angle of Polarization)的数学表达式为:
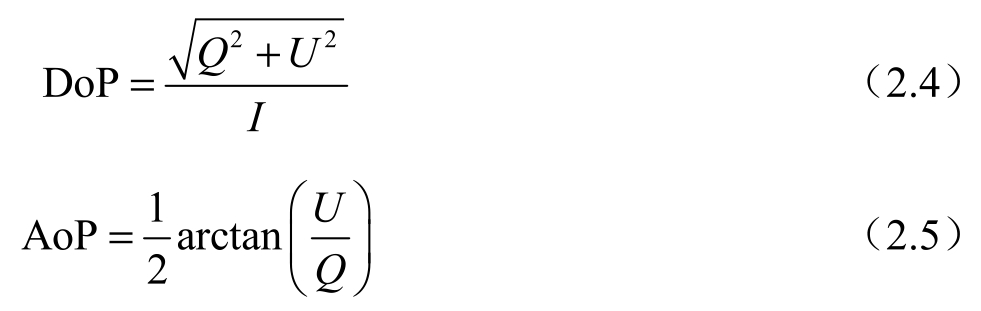
在大气偏振模式中,中性点处的偏振度等于零,根据式(2.4)可知,线偏振光分量 Q 与 U 必须同时等于零,因此,中性线是大气偏振模式中 Q =0和 U =0的天空中性点集。由于中性点需要同时满足大气偏振模式中线偏振光分量 Q =0和 U =0特性,故中性点正好位于线偏振光分量 Q =0的中性线和线偏振光分量 U =0中性线的交点处。因此,利用线偏振光分量 Q =0中性线与偏振光分量 U =0中性线相交的特性,可以检测识别大气偏振的中性点,其算法流程如图2.2所示 [71] 。
图2.2 基于中性点相交特性的中性点识别方法的算法流程
目前,大气偏振模式的形态表征主要是用不同粒子的散射特性,而对大气偏振模式的特征信息描述相对较少。但在大气偏振模式实际应用中,需要对其偏振特征进行有效提取,同时解析成为计算机硬件所能识别的特征模式 [72-73] 。大气偏振光表征方法如图2.3所示。
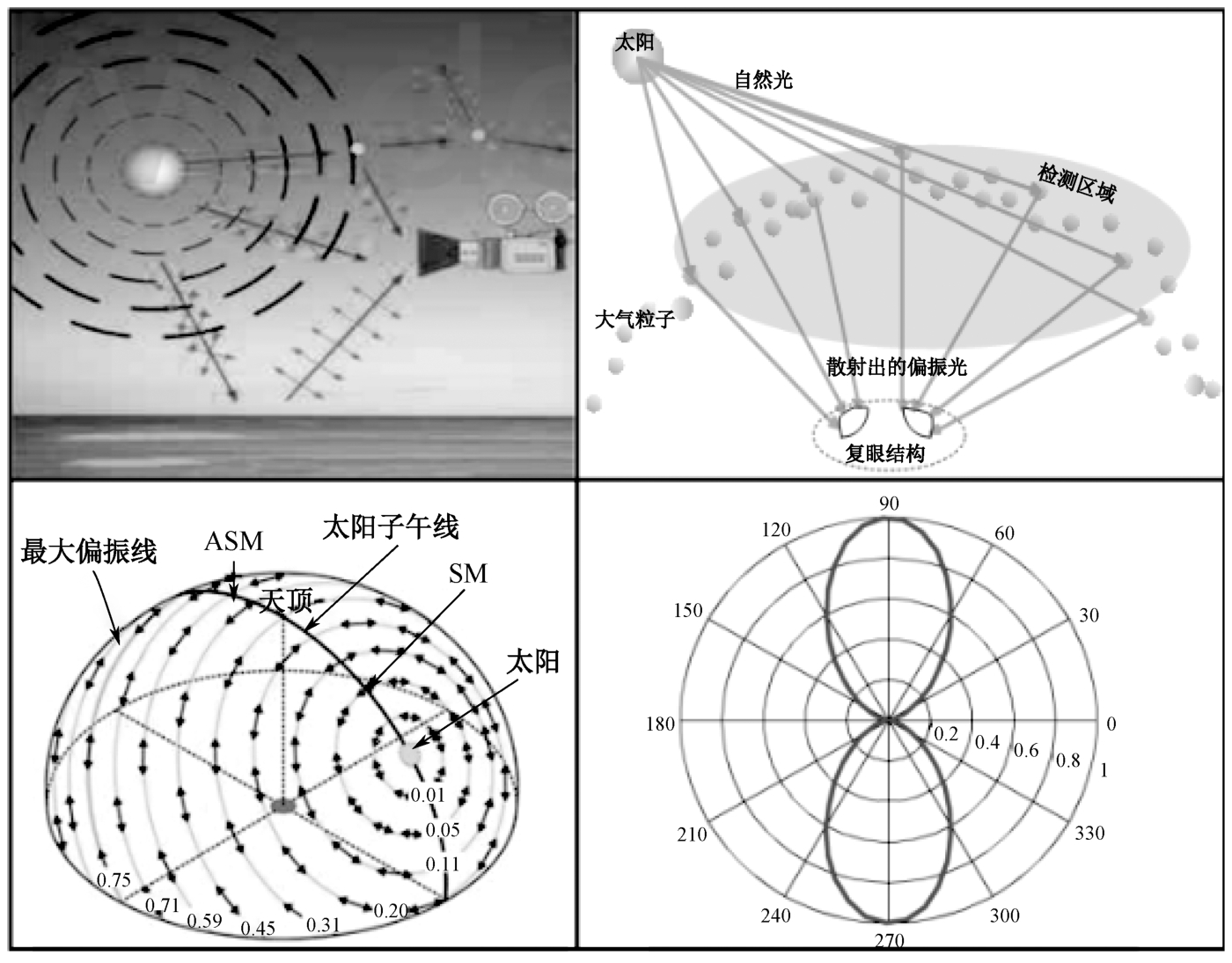
图2.3 大气偏振光表征方法
太阳光经过大气粒子散射后,产生的偏振光在天空中形成的特殊分布模式,具有显著的分布规律。在晴朗无云的天气条件下,散射粒子主要由大气分子组成,其尺寸远小于光的波长,因此可以用一阶瑞利散射模型来描述晴朗无云天气下大气的散射过程,即散射光的 E 矢量(光波中的电振动矢量)方向垂直于散射面 [74] 。
图2.4所示为与地理方向相关的大气偏振模式三维空间坐标系。在该坐标系中,坐标轴方向分别取东、北、天顶方向,其中坐标原点 O 表示观测者的位置, ϕ 为入射光的偏振角, θ 为散射角; S 表示太阳在天球上的方向,用天顶角 γ S 和方位角 α s 来描述,其中天顶角与太阳高度角互为余角; P 代表观测方向,其天顶角和方位角分别为 γ 和 α 。
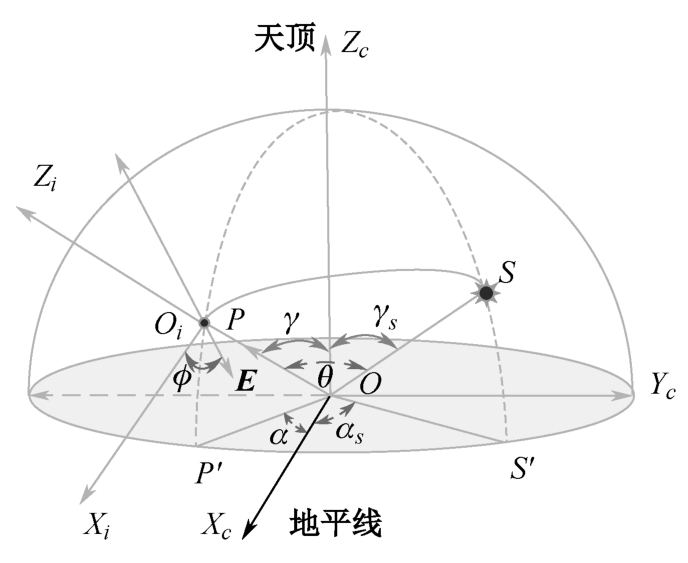
图2.4 与地理方向相关的大气偏振模式三维空间坐标系
根据大气偏振模式的偏振角特征信息,实时解算载体在实际运动过程中的航向角信息,需要定义如下坐标系并进行相应转换。根据现有参考文献,右手直角坐标系定义方法如下 [76] :
偏振相机所在坐标系( OX c Y c Z c ): X c 轴和 Y c 轴分别是指偏振成像仪的横轴和纵轴, Z c 轴为偏振成像仪的光轴。整个偏振成像系统经调平后, Z c 轴最终指向天顶方向。
入射光所在坐标系( O i X i Y i Z i ): Z i 轴指向观测者的观测方向, X i 轴位于观测者观测方向所在平面( OPP ′ )内, Y i 轴与 X i 轴及 Z i 轴构成右手直角坐标系。为简化图形, Y i 轴在图中没有标出轴。
根据一阶瑞利散射模型,天空大气偏振模式的偏振度表示为 [77] :

式中, θ 为散射角。
观测者的观测方向矢量和太阳方向矢量在上述偏振相机所在坐标系中可以表示为:

由式(2.7)和式(2.8),可以计算出散射角 θ :

理论偏振度
d
就可以根据式(2.7)和式(2.8)计算获得。偏振角
ϕ
定义为入射光的
E
矢量方向与入射光坐标系
X
i
轴的夹角。根据一阶瑞利散射模型可知,大气偏振模式中散射光的
E
矢量方向
 在上述相机所在坐标系中表示为:
在上述相机所在坐标系中表示为:

其中,
 是方向余弦矩阵,它表示从相机所在坐标系到入射光所在坐标系的转换矩阵,即:
是方向余弦矩阵,它表示从相机所在坐标系到入射光所在坐标系的转换矩阵,即:

则大气偏振模式中散射光的
E
矢量方向
 在上述入射光所在坐标系中可以表示为:
在上述入射光所在坐标系中可以表示为:

解算得到入射光偏振角 ϕ 为:

因此,根据式(2.6)和式(2.13)可求解基于一阶瑞利散射模型的偏振度 d 和偏振角 ϕ 。
由上述分析可知,大气偏振模式是一种与时间相关的稳定空间分布,可以在太阳子午线获取的基础上进行航向角解算。采用上述经典三维空间坐标系,在载体所在坐标系中,太阳子午线与载体体轴的夹角为方位角 α b ;在参考坐标系即所在坐标系中,太阳子午线与地理真北的夹角即方位角 α a ,且该方位角可以通过天文年历计算获得,载体体轴相对于地理真北就是航向角,即 ϕ = α a -α b ,对式(2.14)做值域变换即可得到载体的航向 [78] ,整个航向角获取示意图和流程图分别如图2.5(a)、(b)所示。

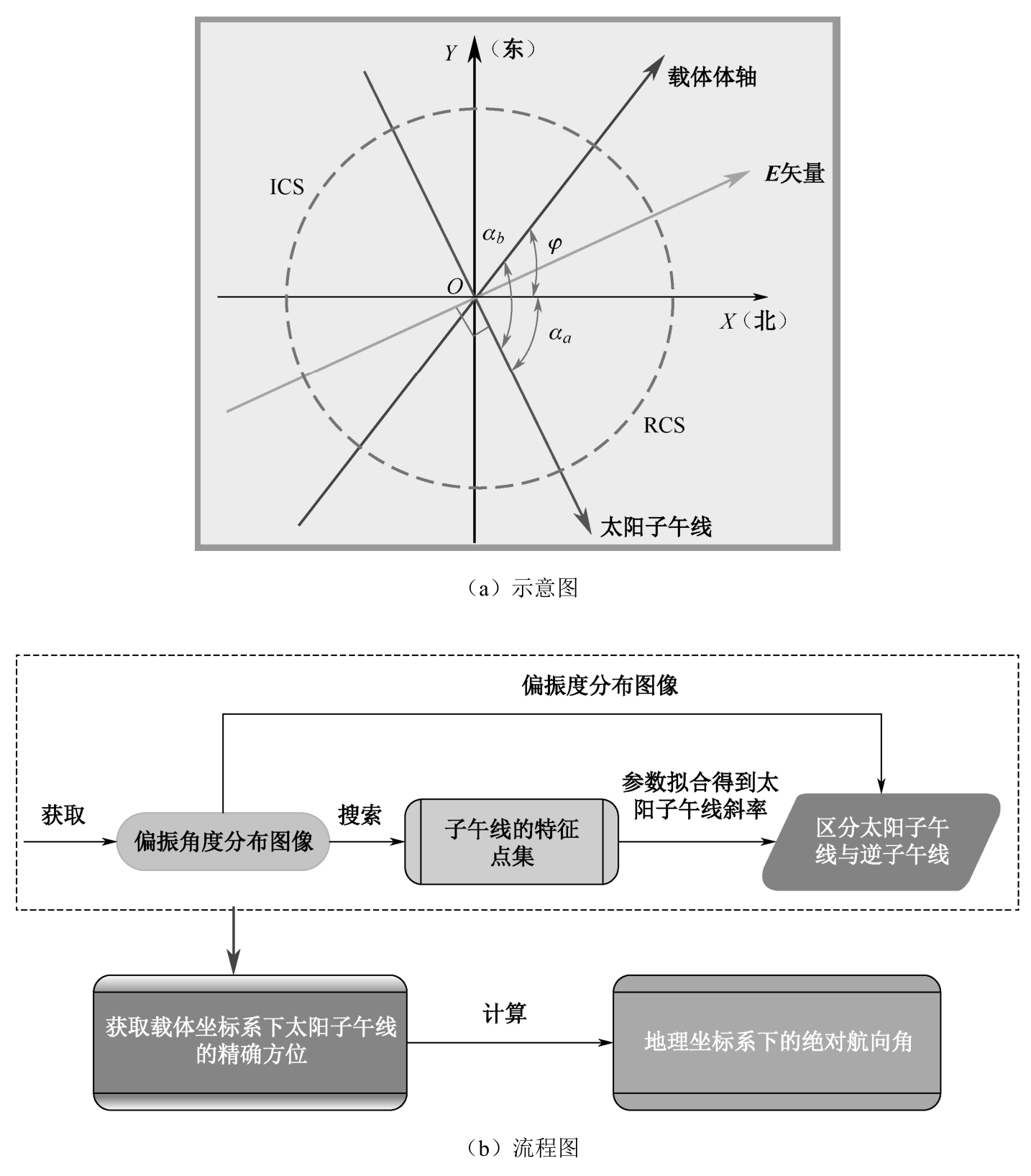
图2.5 航向角获取示意图和流程图