
下载掌阅APP,畅读海量书库
立即打开



目前对人—车—路交互的研究主要关注 3 个方面:行为、心理、生理。行为上主要关注驾驶分心、驾驶疲劳、酒驾、路怒等。心理上非常重要的一个学科就是认知心理学,结合汽车主要关注人的感知、认知、决策。由于驾驶员行为异常复杂,驾驶行为作为人类行为的一种,其理论发展一定离不开心理学、生理学、行为科学等相关领域的理论和知识。要想更全面地了解驾驶员的驾驶行为,需要对人类感知、认知、决策与行为过程进行整体的了解。驾驶员的认知过程和行为模型,是驾驶安全领域中具有重要意义的主题。
(1)描述性与层级模型
描述性模型指那些对不同特征的驾驶行为进行静态的、分类表述的模型。描述性模型的子模块是彼此独立的,有层级关系但没有动态联系。
Michon在Janssen的工作基础上总结了驾驶任务的层级模型。该模型将驾驶过程中的任务按照时间层次划分为 3 部分:计划层、策略层和控制层。其中,计划层主要指旅途的整体计划阶段,例如路线和车辆的选择,何时出发,何时到达目的地,旅途中风险与花销评估等。这一类决策的时间较为充裕,主动性强,往往在正式的旅程开始之前就已经决定。策略层的决策多发生在驾驶过程中,主要包括驾驶员对路上一些情况的主动及被动处理,比如超车、换道、减速让行、等待交通灯等。这些决策灵活多变,依赖于路面的具体情形,也会受计划层决策结果限制,通常需要在几秒内作出决定。控制层主要包括各种对车辆即时的操控,如速度控制、方向控制和距离控制,这些任务在驾驶过程中时时刻刻都在发生,通常依赖于驾驶员的熟练技巧进行自动化处理,并不需要较高的意识水平。
层级模型简洁而完整地描述了驾驶中不同层次行为的特征。由于这些不同层次的行为具有不同的认知特征和影响因素,因此无论对驾驶行为过程的描述研究,还是对数据解释、产品功能设计乃至于风险驾驶中干涉措施的提出,这种细化和区分都具有重要意义。因此,层级模型在后继的研究中得到了较多引用和拓展(图1.19)。
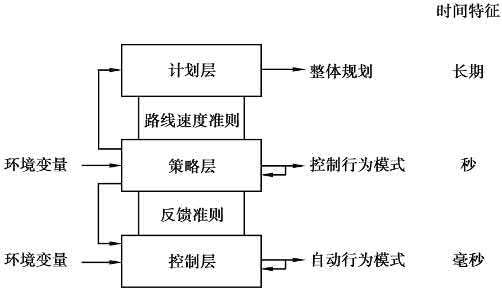
图 1.19 驾驶行为的层级模型(Michon)
(2)信息处理与情景意识模型
Wickens在 1992 年提出了一个有限能力的信息处理模型,广泛解释人类的一般信息处理过程。这个模型把人类接收信息的过程主要分为 4 个步骤:
①通过感官从外界搜集信息;
②信息的感知和理解;
③决策与反应选择;
④反应的执行。
在第一阶段,通过感官从外界搜集到的信息主要存储在短时记忆中,在它们迅速消失前,大脑会自动地将显著的、重要的信息特征提取出来,而那些被忽略的信息则就此失去了。到了第二阶段的感知和理解,人们才真正意识到外界有哪些事物。大脑依靠过去的经验(长时记忆)来排列和认知注意到的信息。第三阶段是决策阶段。大脑对注意到的信息进行分析,并决定要不要做出反应以及怎样做出反应。对于熟悉的决策模式,大脑也经常依靠记忆中已经储存好的范式进行快速处理。第四阶段则是决策的执行阶段,如果执行不出错误的话,那么第三阶段的决策将会表现为具体的反应和行为。在驾驶领域中,Shinar在 1978 年提出过一个有限能力的驾驶员信息处理模型来描述驾驶员在驾驶过程中的信息处理过程(图 1.20)。该模型中增加了来自车辆控制的动力学反馈、驾驶员生理心理因素的影响以及车内自动控制系统的作用。在我国,贾洪飞等对由人、车、路、环境所构成的交通系统进行建模与分析,在此基础上提出了驾驶员的信息处理结构模型。
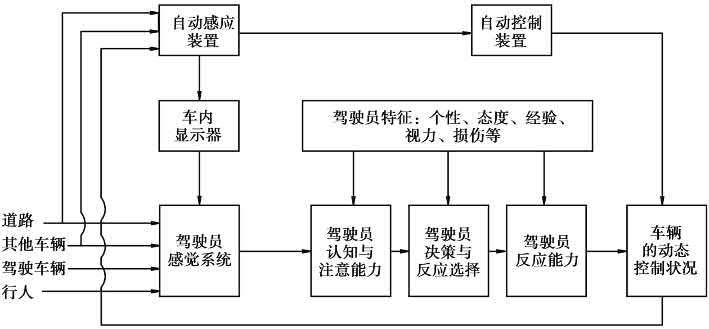
图 1.20 有限能力的驾驶员信息处理过程模型
信息处理模型突出强调了注意资源的有限性对驾驶行为的影响。高速驾驶中,驾驶员要面对大量信息流并且迅速对它们做出反应。然而,由于人的处理能力有限,在多种任务共同争夺有限的注意资源时,某些信息可能被遗漏或错误认知,从而导致事故。因此,该模型常常被用来研究司机由于次要驾驶任务导致的注意力分散等风险行为。
(3)动机模型
从汽车诞生以来,随着人类科技的发展,车辆的安全性有了长足进步,各种交通安全措施也有了显著发展。然而,这些有针对性的安全措施实施以后并没有取得令人满意的效果。面对新的安全措施,驾驶员常会表现出新的危险行为,使得事故率居高不下。早期的学者们敏锐地捕捉到了驾驶员行为的这种自适应特点。于是,描述和预测驾驶员行为调整模式的几种动机模型应运而生,其中比较著名的是风险平衡理论、零风险理论和风险规避模型。这些模型在后来的驾驶员行为研究中得到了较多引用,通常被用来预测、解释和干涉驾驶员风险行为。
英国的心理学家Taylor在 1964 年的实验中,测量了 20 名驾驶员在不同宽度和不同条件的道路上的皮电反应(Galvanic Skin Response,GSR)。由于人的紧张和焦虑会增加人体汗液的排出,从而改变皮肤的电传导率,因此在控制条件下,测量皮电可以了解人们关于紧张和焦虑的反应。这次实验让Taylor发现了一些重要的结果:
①驾驶员的皮电水平并不依赖于道路宽度和条件,相反,它保持着一个相对稳定的水平;
②皮电反应分布与交通事故率分布非常相似,那些没有经验的新驾驶员比那些有丰富经验的驾驶员具有更高水平的皮电反应,正如他们也存在着更高的交通事故率;
③驾驶员通过控制车速来调节他们所愿意承受的皮电反应水平。
Taylor据此推论说,驾驶员通过控制车速使自身保持着相对稳定的心理紧张程度,这种紧张程度和他们面临的风险成正相关。 Wilde注意到了这个实验,并且在1982 年用不同方法重复得到了实验结果。另外,他从世界卫生组织的统计数据发现,虽然当时交通事故率在逐年不断增长,可是人类整体的意外死亡概率却始终处在同一水平。他还留意到,在芝加哥大学一位学者的研究建议下,一项新的汽车制造标准带来的矛盾效果:正如该措施的初衷,驾驶员的死亡率明显得到了减少;然而不如所料的是,行人和自行车使用者的死亡率却同时显著上升了,而且比驾驶员死亡率的降低量还要高。基于以上研究和观察,Wilde提出了他的风险平衡理论(Risk Homeostasis Theory,RHT),又称“风险目标”或“风险补偿”理论。该理论认为,驾驶员倾向于保持一定的风险水平。当驾驶员所感知到的风险和他所愿意接受的风险水平出现差异时,他就会调整自己的行为来减小二者之间的差异。因此,事故率最终取决于驾驶员事先设定的风险接受水平。换言之,当外界的环境变得更安全时,驾驶员会采取更冒险的行为,因此个体卷入事故的概率依然会维持原状。
不仅有安全的动机,还存在着希望缩短时间、节省精力、获得驾驶中的舒适感受甚至展示名誉地位等多种动机,而后面的这些动机经常是和安全动机相悖的。由于这些动机存在,驾驶员并非追求最大安全,而是在保证有限的危险的前提下,尽量满足其他动机。因此,驾驶员总在一个安全的边界上行驶。与RHT理论不同,边界模型中的驾驶员并非随时用理性来衡量他们所遇到的危险并且调整行为,以便将风险保持在一个水平。相反,只有当所感知到的风险已超过或即将超过一定限度时,驾驶员才会调整他们的行为以降低他们所面临的风险水平,直到风险低于临界值为止。该理论假定了一个感受上的“主观危险”或“恐惧监控器”,它会在风险达到边界值时提醒驾驶员调整行为。而在此之前,驾驶员则只需依靠他们熟练的自动化反应来应对驾驶中的种种境况。后来,这个边界值被进一步修订为主观感受的零风险,模型也因此更名为零风险模型——驾驶员在大部分时间里表现得像没有任何风险一样。
Fuller提出的风险规避模型,后来又被称为风险分配模型,是把Wilde的模型中的以事故概率来衡量的风险目标用任务难度来替代。 Fuller认为,驾驶员试图保持一定任务难度。当任务需求超过驾驶员的能力时,驾驶员通过调整行为(如降低车速)来使任务难度与能力相匹配。反之,当任务难度低于驾驶员的能力时,驾驶员则通过降低自己可分配的能力,如将注意力转移到其他非驾驶任务(如聊天、接电话、听音乐等)中,使得任务难度仍然保持在一定水平。这同时意味着,在车况与路况条件越来越好的同时,驾驶员将越来越少的精力投入驾驶任务中,从而使蕴藏的危险并没有真正下降。在任务难度忽然增加时(如遇到突发状况),驾驶员很容易因为没有足够的时间来调整可分配的能力资源,从而引发事故。与风险平衡理论及零风险理论相比,Fuller的模型区分了主观的风险感知与客观的风险评价,任务难度也可以通过速度控制,因此具有较好的可验证性。 Fuller发现,驾驶员的主观风险和任务难度是相匹配的,它们都随着速度上升而线性增加;而估计的事故率则只有在任务难度达到一定水平(超过驾驶员的能力)之后才明显上升,之前则几乎保持不变。这说明了在Wilde模型中,将个人的危险感与客观事故率等同是不合理的;而情况似乎更接近于Summala提出的零风险模型——在任务难度没有达到一定水平时,驾驶员对客观风险的估计保持为零。
动机模型主要描述了在驾驶过程中,驾驶员会在一定范围内主动控制他们所遇到的风险,而且这种控制并非总降低风险。然而,迄今为止,动机模型更多是作为一种定性的模型得到应用,用来指导、检验和预测一些安全干预手段的效果。另外,动机模型由于缺少严谨的数据验证,也受到了一定质疑。但不可否认的是,动机模型的确揭示了驾驶员行为中非常重要的且如今被学界所普遍接受的一个现象,即驾驶员行为的自适应性。动机模型率先描述了驾驶员的行为调整依赖于他们可接受的风险程度。
驾驶人在行车过程中认知、判断和操作时,环境认知、决策处理和驾驶操作能力是有限的,因此将其称为驾驶负荷与驾驶人自身信息特征、驾驶经验、驾驶安全态度以及行车道路交通环境条件有关。驾驶负荷还与驾驶人感知的环境信息量有关,不同道路线形和行车环境具有不同信息量,同一驾驶人行驶在不同环境条件下,其驾驶负荷也将不同。
(1)Yerkes-Dodson法则(叶杜二氏法则)
Yerkes-Dodson法则(叶杜二氏法则)是心理学家叶克斯( Yerkes)与杜德孙(Dodson)经实验研究归纳出的一种法则,用来解释心理压力、工作难度与作业成绩三者之间的关系。他们认为,因为动机而产生的心理压力对作业表现具有促动功能,而其促动功能之大小将因工作难度与压力高低而异。在简单易为的工作情景和较低的心理压力之下,较佳的成绩将产生;复杂的情绪扰乱认知性的心理活动,凡复杂困难的工作,在工作程序上必定含有多种因素的交互配合的关系,如果心理压力过高,思考稍有疏忽,就难免忙中出错。简单工作多属重复性活动,此种活动日久便会形成自动化的连锁功能,至此地步,无须认知思考,若存在一定心理压力,不但不会影响自动化功能,反而有可能提升自动化的速度。根据Yerkes-Dodson法则,驾驶负荷与驾驶绩效之间存在着一种倒U形关系,适度的驾驶负荷水平能够使绩效达到顶峰状态,过小或过大的驾驶负荷都会降低驾驶绩效(图 1.21)。
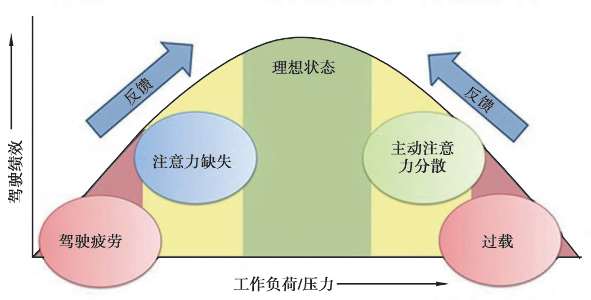
图 1.21 基于Yerkes-Dodson法则的驾驶绩效与驾驶负荷关系图
(2)驾驶员状态管理
根据美国高速公路交通安全管理局统计,非驾驶任务导致的驾驶分心和注意力分散是美国交通事故的主要原因。通常情况下,驾驶汽车并不总需要驾驶员在任何时候都投入所有的注意力。大多数情况下,驾驶员并不会把所有注意力投入驾驶任务中,当道路状况不确定性增加的时候驾驶员将会做出调整并投入更多注意力在驾驶任务中。对驾驶员状态实时监测,对驾驶员工作负荷进行实时评价并采取相应的防控策略以提高驾驶绩效和驾驶安全,成为智能网联汽车发展的重点关注内容(图1.22)。驾驶员状态管理可以更好地预警、提升安全。
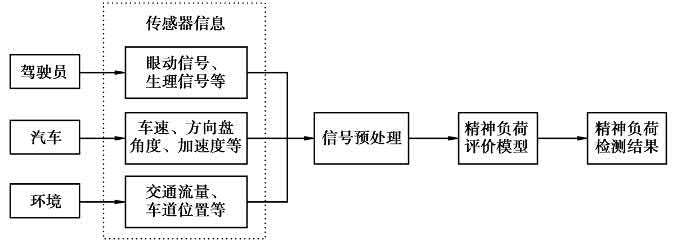
图 1.22 驾驶员状态检测
近年来,心理学和神经科学领域对人类主观感受、情绪的研究日趋深入,取得了许多重要而新鲜的成果,关注相关基础学科的发展,将相关最新理论应用于驾驶员行为领域中并验证,将会成为促进驾驶行为模型不断发展的源头活水。
根据神经科学相关研究,人大脑信息加工共分为 3 个阶段:知觉—认知—反应(行为)。智能网联汽车次任务人机交互可感知信息多以视觉和听觉形式呈现。如图 1.23 所示,在知觉阶段,眼睛首先通过感觉记忆获取瞬时视觉信息(一般不超过1 s) ,然后根据特有的认知结构(即长时记忆)过滤有用信息,此过程被称为选择性注意。在认知阶段,一方面长时记忆为信息选择(选择性注意)提供依据;另一方面将注意到的信息与长时记忆中的信息进行加工,在车载信息系统中,常见的人机交互认知加工包括信息搜索、信息识别、信息匹配、逻辑推理、思维换算等。在反应阶段,身体的执行系统(眼睛、手、脚、嘴巴等)会对认知加工发出的命令做出反应,在车载信息系统中常见的人机交互行为包括手指操作和发出语音指令。
在次任务人机交互过程中,可感知信息加工不是按这三阶段顺序进行的,在选择性注意与长时记忆之间大多数情况下存在频繁的交互迭代。例如查看车载导航界面任务,在知觉阶段,驾驶人浏览车载导航界面,首先根据当前时刻信息加工的结果进行选择性注意,并将注意到的信息与长时记忆中存储的信息进行匹配,如果当前注意的信息与长时记忆中存储的信息不匹配,将继续选择性注意的过程。由于选择性注意与长时记忆的紧密关联性,研究中不单独考量知觉负荷,将知觉过程和认知过程产生的工作负荷统称为脑力负荷。因此,本书将次任务负荷按照信息加工过程分为两大类:脑力负荷和行为负荷。
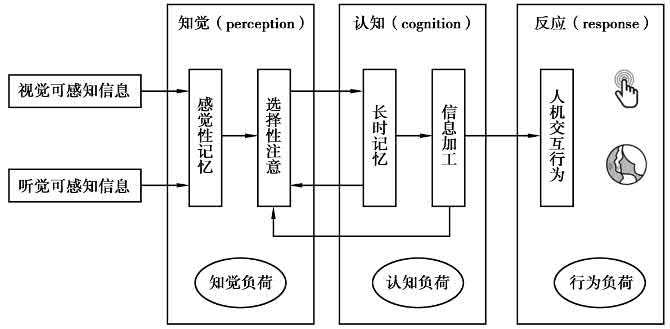
图 1.23 次任务负荷的信息加工分层
人脑在执行信息加工任务时,脑力资源并不都是可以利用的。考虑到驾驶情绪、疲劳等因素,可被利用的资源总量根据驾驶人的生理状态实时波动。假设在一段时间内,驾驶情绪与疲劳状态是稳定的,那么可利用资源总量也处于相对稳定的状态。可利用资源被分配在主次任务中,因此随着次任务占用资源量增加,主任务占用的资源量就减小,驾驶安全性则降低,如图 1.24 所示。
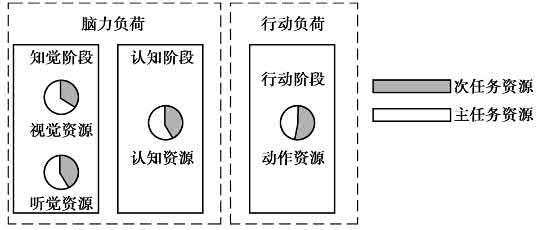
图 1.24 分心驾驶脑力资源分配机制
驾驶次任务是交通事故非常重要的影响因素,因为次任务容易使驾驶人分心。许多研究已经关注到次任务对驾驶行为的严重危害,例如打电话、发信息、使用导航以及与娱乐信息交互。 Greenberg等与Lee等分析了车载信息系统使用过程中驾驶员视点变化数据,指出驾驶人长时间注视会在视觉上导致注意力分散,从而产生交通事故。 Salvucci等研究了iPod等车载音乐设备对驾驶绩效的不利影响,通过模拟驾驶实验分析了驾驶人使用音乐播放器时车道轨迹偏差率,发现播放车载音乐与打电话对驾驶主任务绩效影响程度相当。
还有一些研究证实了部分次任务对驾驶行为没有明显影响,例如听广播,驾驶次任务对驾驶安全性的干扰程度取决于该次任务为驾驶人带来的额外负荷大小。Lansdown等对比了双重任务与单任务下驾驶主任务难度不同对驾驶主任务绩效的影响,主任务难度越大,驾驶主任务绩效下降得越快。驾驶主任务绩效最主要的衡量标准是反应时间,具体指在驾驶环境中事件发生时驾驶人的反应速度。
驾驶次任务对驾驶安全性的影响程度还取决于次任务占用的资源通道。Wickens等在“多重加工资源”概念的基础上总结了多资源理论。如图 1.25 所示,该理论将人的加工资源在知觉通道、编码和阶段 3 个维度上假设为一个立方体结构。其中知觉通道包括视觉和听觉,阶段包括感觉、认知和反应,而编码则分为空间编码和言语编码。此外,视觉通道对信息的注意还可以区分为焦点的( Focal,或称中央的)和外围的(Ambient,或称边缘的),形成第四个维度。图中实线两侧使用不同的资源。一般可以认为 3 个主要维度在某种程度上是相互独立的;区分听觉和视觉资源的垂直维度仅适用于知觉阶段,而区分言语与空间加工的编码维度则对所有阶段都适用。
大量证据表明,使用手机确实会干扰驾驶,这直接导致 2011 年 12 月美国国家交通安全委员会建议颁布关于在驾驶中使用手机的禁令。手机任务导致的听觉资源占用远大于听音乐或听收音机,这是因为除了占用听觉感知通道资源外,还占用了语言加工的资源,这导致与行动资源竞争,从而导致驾驶人刹车、调节方向盘等行动延迟。
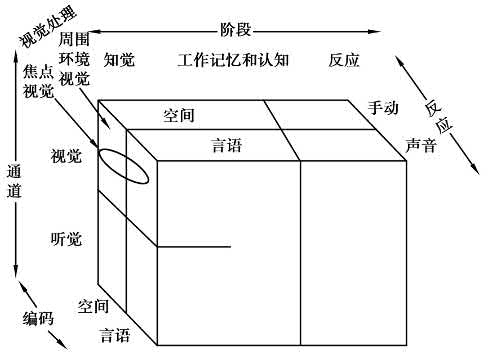
图 1.25 Wickens的多资源理论模型
根据中国公安部交通管理局的统计数据,中国 2008 年因疲劳驾驶导致的道路交通事故共 2 568 起,其中死亡 1 353 人,受伤 3 129 人,造成的直接财产损失约为5 738万元。2008 年高速公路共发生交通事故 1 203 起,占事故总数的 46.85%。高速公路交通事故的主要原因中疲劳驾驶位列第一,占所有高速公路交通事故起因的11.09%。
人在重复、机械性地完成某一工作时,会随着时间推移逐渐进入疲劳状态。这一特点对汽车驾驶同样适用。驾驶员在长时间开车而得不到有效休息的情况下,会自发性地进入困倦状态,此时极易导致驾驶事故。为此,世界许多国家也针对驾驶时间做出了相应规定,用以对驾驶员的单次驾驶、累计驾驶和休息时间等进行限制,然而在实际应用中却收效甚微。
尽管我国已经在《中华人民共和国道路交通安全法实施条例》第六十二条中明确规定“连续驾驶机动车超过 4 h未停车休息或者停车休息时间少于 20 min”。但驾驶人常因各种因素,或追求利益,或着急赶路等,不能自觉遵守相关规定。因此,在实际驾驶环境中对驾驶人疲劳状态检测与预警技术的研究,成为减少当今交通运输事故的关键之一。
迄今为止,国内外诸多学者开展了许多关于疲劳检测与量化的研究,其中主要的理论方法有主观检测方法与基于生理表征的客观检测方法。
(1)主观检测方法
主观检测方法主要利用各类量表和调查表来记录被试当前的主观感受,并对其进行测评和赋值,再利用统计学方法对被试目前的疲劳程度进行评判,其中得到较为广泛应用的有皮尔逊疲劳量表、驾驶人自我记录表、斯坦福嗜睡量表和睡眠习惯调查表等。
(2)驾驶疲劳客观检测方法
驾驶疲劳客观检测方法思路为:首先,确定能表征驾驶员疲劳状态的参数,参数可以是驾驶员的生理信号(如心电图ECG、脑电图EEG等)、肢体语言(如眨眼频率、哈欠程度等)和当前车辆的行驶状态(如方向盘角度、行驶速度、车道偏离等)等,通过对参数的处理得到与疲劳相关的特征指标。其次,确定特征指标与疲劳等级的数值关系或建立特征指标与疲劳等级的映射模型。最后,根据当下驾驶员的特征指标判断其所处的疲劳状态。
在疲劳检测的基础上,实现疲劳预测是更具有实用价值的技术。
根据美国高速公路安全管理局(NHTSA)和美国汽车工程师学会( SAE)推出的分类标准SAE J3016 TM 《标准道路机动车驾驶自动化系统分类与定义》,自动驾驶汽车根据其智能化、自动化程度可分为 6 个等级:无自动化(L0)、驾驶支援(L1)、部分自动化(L2)、有条件自动化(L3)、高度自动化(L4)和完全自动化(L5)。驾驶员疲劳状态预测主要针对以下两种应用场景。
①面向L2 及以下的车辆,基于驾驶员昼夜节律(驾驶开始时间)、驾驶前的睡眠时间、开车时间、开车过程中的休息时间等驾驶背景信息及驾驶员生理特征信息,建立驾驶员疲劳等级预测模型。 Zhang等研究了驾驶员的昼夜节律(驾驶开始时间分别是 09:00、14:00、21:00)、驾驶前的睡眠时间(4 ~ 7 h)、开车时间以及开车过程中的休息时间等因素对驾驶疲劳的影响,并定量地建立了疲劳程度的线性回归预测模型。同时,结合驾驶员生理特征对疲劳预测有积极作用。 Yang等结合驾驶员背景信息、生理特征信息(脑电、心电、眼动等)以及驾驶绩效信息,应用一阶隐式马尔科夫模型,建立了基于动态贝叶斯网络的疲劳认知模型。此类方法建立的疲劳预测模型是一种基于上下文信息的长时预测模型。
②面向L3 及L4 等有条件自动驾驶的车辆,基于驾驶员生理特征与当前驾驶疲劳状态预测下一时刻的疲劳状态。传统的疲劳预测方法旨在实时检测驾驶员疲劳,但在许多危急情况下,如高度自动化驾驶的接管过渡时期,这可能为时已晚。 Zhou等融合生理特征(心率、呼吸率)与眼动指标,对在高度自动驾驶条件下驾驶员从不疲劳状态到疲劳状态的转换进行了预测,疲劳预测提前时间至少为 13.8 s,这对驾驶接管请求时间的改善具有重大意义。此类方法主要针对实时信息对下一时刻疲劳状态进行短时预测。
在未来驾驶疲劳预测的研究中,如何融合生理信息、驾驶行为信息以及驾驶行驶信息等并建立疲劳预测模型和获得更加准确且长时的预测效果,是需要进一步研究的问题。同时,目前研究对驾驶疲劳的预测往往只停留在是否产生疲劳,进一步的研究需要预测更细致的疲劳程度分级,并且找到驾驶疲劳对驾驶风险的影响关系,这将对驾驶安全有着重要意义。以上内容也是本书研究的重点。
在疲劳检测与预测的基础上进行疲劳唤醒,有助于保证驾驶安全、减少事故。
(3)疲劳唤醒理论
人的感知模型是疲劳唤醒的基础理论,人可以通过感受器感受到外界传来的刺激,并把刺激转化为神经冲动的感受神经元周围突起的末梢。通常情况下,刺激可分为物理刺激和化学刺激。物理刺激主要包括光、声音、动能和热能等,如由光带来的色调、明度和饱和度的影响,声音带来的音高、响度和音色的影响等;化学刺激则主要包括口味、气味等。
如图 1.26 所示,各种刺激以不同方式作用在不同感受器上,引起感受器膜电位变化,这些信号最终会由感觉纤维传入中枢神经引起感觉,进而引起人的行为反应,由此实现驾驶员唤醒。
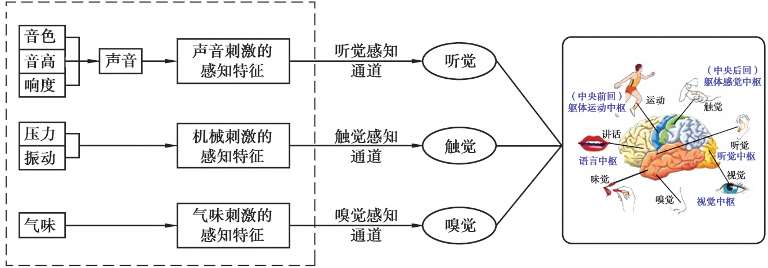
图 1.26 人的感知模型
(4)驾驶疲劳安全防控
在驾驶疲劳的研究中,安全防控是必不可少的环节。处于疲劳状态的驾驶员对车辆的操控以及对环境的感知能力都有一定程度降低,在某些极端情况下可能无法准确感知危险,并做出相应避险行为。因此,多模态疲劳唤醒理论是安全防控的主要内容。在人的感知模型基础上,多模态的疲劳唤醒模型通过对多个感官的综合作用使驾驶员恢复到更好觉醒状态,从而安全地完成驾驶任务(图 1.27)。
(5)危险感知模型
在车辆端,先通过车辆自带的传感器感知环境态势,再通过建立危险评价模型,对车辆所处环境进行评价。车辆若遇到危险情况则会通过警报、自主操控等方式规避危险。
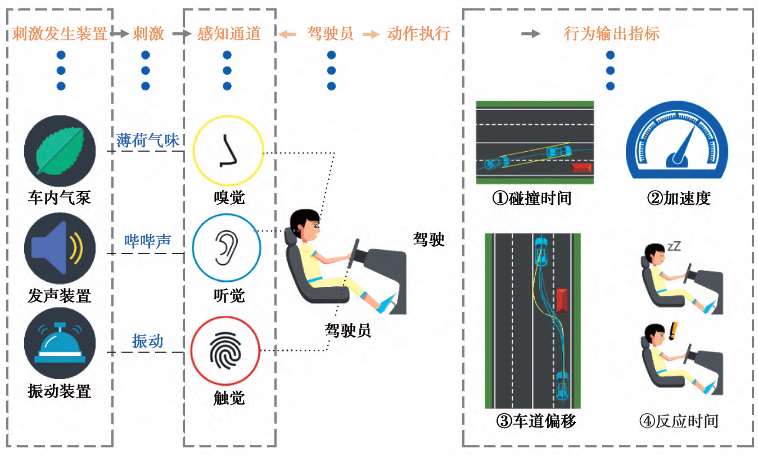
图 1.27 驾驶员多模态唤醒模型
该模型的主要内容是建立完善的危险感知与评价体系,其中主要参考车辆自身运动参数以及车辆与环境的关系参数。车辆自身参数主要有加速度、速度、横向加速度等;环境参数主要有TTC、车道偏移等。系统通过对典型危险场景进行建模和设定临界参数来实现驾驶安全防控。
驾驶汽车是一项复杂的任务,驾驶员必须应对不同任务,如驾驶汽车和操作多个辅助和信息系统。这些任务中每一项都是一个复杂的认知过程,需要驾驶员占用非常多的认知资源,即使最小的干扰也可能带来灾难性的后果。情绪是一个可能影响认知功能的关键因素,因此会增加对驾驶员认知资源的需求(Mesken,2006)。
每年,全球道路上发生了 2 000 万~ 5 000 万起非致命伤害和 124 万例致命事故(Organization,2015),而驾驶员无法控制情绪已被确定为事故的主要原因之一(James,2000)。研究表明,在负面情绪状态下驾驶是道路交通事故中的重要风险因素,可能导致人员经济损失、严重创伤甚至死亡。极端情绪驾驶,特别是愤怒驾驶,可能像在酒精或疲劳的影响下驾驶一样危险( Roidl et al.,2013; Lajunen,2001)。在最坏的情况下,驾驶员可能做出严重危险行为,不仅会伤害自己,还会伤害车内乘客和其他道路使用者。驾驶员其他负面情绪特别是沮丧,经常和激进的驾驶联系在一起(Berdoulat et al.,2013; Schwebel et al.,2006),而激进驾驶通常会导致最严重的道路交通事故。与此相反,积极的情绪会对驾驶员思考和解决问题的效率产生影响(Murray et al.,1990),也会带来更好的表现和更少的冒险,研究和经验表明,快乐的司机是更好的驾驶员(Groeger,2013)。
心理学家对情绪有两种分类方法:一种是将情绪分为离散类别;另一种是使用多个维度来标记情绪。在维度上对情绪进行分组,是一种连续的分类方式。目前得到大家广泛认可的是Ekman(Ekman,1992)提出的离散情绪方法,包括 6 个基本情绪,快乐、悲伤、愤怒、恐惧、惊讶和厌恶,并且有研究表明每种情绪都有其特征,可以用这些特征不同程度地表达情绪。 Russell提出了环形模型(Circumplex Model)来描述维度情绪分类(Russel,1980)(图 1.28)。他定义了所有情绪都可以通过两个维度来解释:效价(valence)与唤醒(arousal)。 Mehrabian进一步提出了PAD情绪状态模型,将情绪从 3 个维度进行分区。模型认为情感具有愉悦( pleasure)、唤醒(arousal)和掌控力(dominance)3 个维度(Mehrabian,1996)。在汽车领域,目前主要关注对驾驶员离散情绪类别的研究。
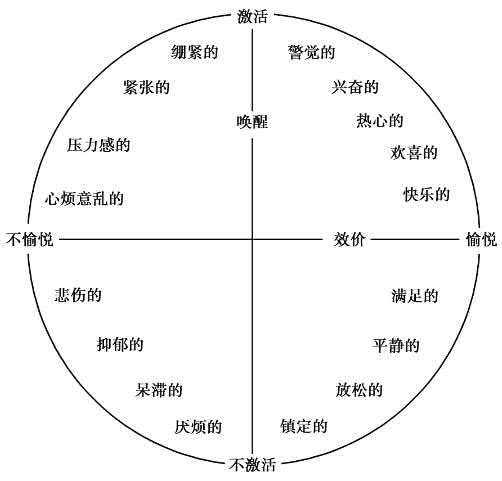
图 1.28 环形模型(Russel,1980)
识别驾驶车辆时引发的人类情绪有助于有效地了解人类行为,以避免因事故造成的损失和伤害,同时,基于识别而进行的情绪调节也会提升驾驶员在驾驶过程中的舒适性。对于高度自动化的车辆,驾驶员仍然具有积极的作用,并且汽车和驾驶员共享控制权,人与车的相互作用非常显著。随着汽车和驾驶员合作,我们需要在情感层面上进行交互以创建成功的控制循环。为了让人们了解情况,汽车必须理解并回应驾驶员的情绪(Shaikh et al.,2013)。在全自动化阶段,驾驶员角色将转变为乘客角色,汽车接管所有过去由人控制的任务。为了让乘客信任他们的自动驾驶汽车,需要有效的乘客与车通信。汽车必须了解人类的情感需求并对情绪做出反应,因此,情绪对未来汽车的安全性和舒适性也至关重要(Eyben et al.,2010)。
为了提高整体安全性和舒适性,驾驶过程中的情绪识别已被广泛研究(图 1.29),一些工作已经解决了模拟环境中识别的驾驶员的情绪状态( Katsis,2008; Katsis,2011;Cai et al.,2011),而其他人则分析了驾驶员在现实生活场景中的情绪(Healey et al.,2005; Rigas,2011; Singh,2013)。研究者们使用图像捕获和处理来跟踪面部运动、手势和肢体语言并获得情绪信息(Kapoor,2003);使用热成像跟踪面部表情(Kan,2005);使用从方向盘和座椅/安全带获取的生物测量值来监测生理变化(Healey et al.,2000);分析语音中包含的声学线索( Jones,2004)。然而,在汽车环境下,实时监测人类情绪仍然具有挑战性,实施高成本、集成系统的复杂性以及道路使用者缺乏安全意识已被确定为根本原因。
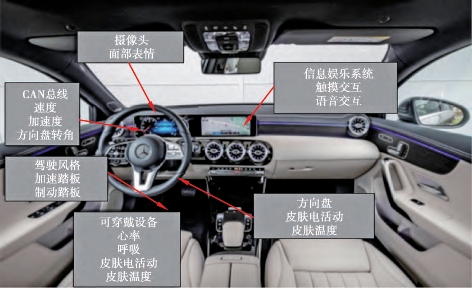
图 1.29 驾驶员情感识别的潜在测量布置(Zepf et al.,2020)
情绪干预被广泛用于人际交往中,例如用于移情。情绪干预被广泛定义为我们用来增加、维持或减少情绪反应的一个或多个组成部分的所有有意识和无意识策略(Gross,2001)(图 1.30)。 Gross描述了情绪干预的过程模型(Gross,2001),情绪干预可以分为情景选择(situation selection)、情景修正(situation modification)、注意分配( attentional deployment )、认知改变( cognitive change )、反应调节( response modulation)。实现这种效果的方法取决于最初的情绪以及是否打算上调或下调。因此,在汽车环境中,我们看到了针对不同情绪状态的不同研究方法。 Nasoz等最初提出了一个简单的警告,以防检测到负面情绪(Nasoz et al.,2002),后来他们的方法被扩展了,例如休息一下(Nasoz et al.,2010),由Oehl等提出来用于分散驾驶员对负面情绪的注意力(Oehl et al.,2010)。 Johnson和McKnight在一项针对 55 名美国驾驶员的公路研究中研究了警告驾驶员即将发生的交通阻塞以减轻愤怒的想法(Johnson et al.,2010)。检测驾驶员的活动状态并对其做出反应以干预驾驶员情绪的系统具有改善道路安全、提升驾驶舒适的巨大潜力。因此,更全面地了解驾驶员情绪识别及干预在研究和实际应用中都具有重要意义。
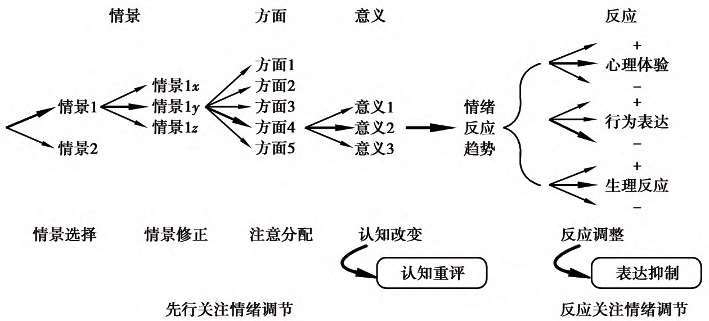
图 1.30 情绪调节模型(Gross,2001)
中国道路交通安全形势严峻,驾驶人普遍存在驾驶风格激进及安全意识淡薄等问题。调查显示,80%以上的道路交通事故致因与驾驶人相关(郭孜政,2009),且我国驾驶人普遍存在驾驶风格激进及安全意识淡薄等问题(Zhang et al.,2006; Huang et al.,2006; Yang et al.,2013)。 Lindgren等的研究显示,频繁换道、近距离跟驰、违规超车等不良驾驶行为充斥于中国道路交通安全文化的现状之中(Lindgren et al.,2008)。现有的关于驾驶行为的研究,多集中于对事故发生前较短时间(1 ~ 2 s量级)内车辆行驶危险状态的监测和预警技术,例如,高级驾驶辅助系统(Advanced Driving Assistance Systems,ADAS)等,而对由驾驶风格导致的潜在于日常驾驶中的不良驾驶行为关注甚少。但驾驶人不良驾驶行为随时间累积,会成为行车安全潜在的巨大隐患,例如,急加速、急减速、近距离跟驰、频繁换道等行为均会增加事故的发生率。因此,对驾驶人日常驾驶中的不良行为进行监测就显得尤为重要。当前世界主要国家开展的道路安全与智能车辆项目均包括对驾驶行为监测技术的研究;例如,美国的PATH、Safety Pilot项目和日本的ASV项目等,而在我国该领域尚处于起步阶段,急需有针对性的研究,我国驾驶人危险驾驶行为的严峻形势也亟待改善。因此,对潜藏在日常驾驶行为中表现出的驾驶风格进行监测及评测,将极大加快驾驶行为诱导交通事故发生的研究,并改善驾驶人的驾驶习惯,将行车安全保障落实到日常驾驶行为中,提升我国道路行车安全性。
驾驶风格与交通事故发生率之间存在很大相关性。研究表明,驾驶人危险驾驶行为发生得越频繁,驾驶人发生的事故数也就越多(Carsten et al.,2013)。同样的,Summala对 6 638 辆车的追踪数据记录表明,换道操作越频繁,发生的事故次数就越多(Summala et al.,2014)。 Tak等基于驾驶过程中的加速和制动操作提取出了表征驾驶风格激进程度的特征指标,并验证了其所提指标与交通冲突之间的强相关性(Tak et al.,2015)。 Sagberg对驾驶风格研究的综述指出,经常性的急加速、急减速、换道等行为均会增加交通事故发生的概率( Sagberg et al.,2015)。 Simons-Morton等对 42 名驾驶人的自然驾驶数据进行分析后发现,激进型驾驶人发生追尾事故或冲突的概率是正常型驾驶人的 4 倍以上(Simons-Morton et al.,2015)。 Yang等通过调查问卷的方式评测得到了 224 名驾驶人的驾驶风格与事故发生次数数据,分析发现两者存在显著相关性(Yang et al.,2013)。 Toledo等在较长时间内对不同风格驾驶人的交通事故数据进行跟踪监督,证明了驾驶风格越激进发生的事故数量也就越多(Toledo et al.,2008)。马艳丽和裴玉龙基于实验心理学特性参数指标,采用模糊聚类方法,将驾驶风格分为 5 种类型,并对其与实际交通事故发生次数之间的关系进行了分析(马艳丽等,2008),结果显示,驾驶风格越激进,发生事故的数量就越多。因此,对驾驶风格深入细致研究,可改善驾驶人的风格习惯,有效提升道路行车安全性。
驾驶风格除了可显著影响行车安全性之外,与车辆的燃油经济性和尾气排放也密切相关。弗吉尼亚理工大学的Jung在其博士论文中采用因子分析方法确定了驾驶风格主要影响因子,继而采用K均值聚类的方法对驾驶风格进行了分类,并对不同风格驾驶人所驾车辆的燃油经济性进行了分析,结果表明,驾驶风格显著影响车辆的燃油经济性(Jung,2012)。 Murphey等对不同风格驾驶人在高速公路上行驶时的油耗进行比较,结果显示,驾驶人的激进程度越高,车辆的油耗就越高(Murphey et al.,2009)。麻省理工学院的Berry在其博士论文中证实了驾驶激进度在总驾驶人群中服从对数正态分布(log-normal distribution),并且驾驶激进度越高,急加速和急减速操作就越多,燃油经济性也就越差(Berry,2010)。此外,曾诚等针对中国的研究也表明,急加速、急减速、鲁莽换道发生频次越高,驾驶风格越激进,燃油消耗量就越大(曾诚等,2010)。
在当前车辆网联化的大背景下,驾驶风格对于行车安全性的研究就显得更为重要。其研究应用的技术路线主要包括在线交互反馈和离线风格监测两方面,如图1.31所示。车辆通过车载的传感器技术获取驾驶人操作信息、交通环境泛在感知信息、GPS定位信息、车—车(V2V)和车—路(V2I)协同信息等,并对获取到的信息做实时分析,在监测到危险时通过人—车交互反馈技术及时给予预警信息,并在必要时实施主动干预措施,在线保证行车安全性。或可将获取到的信息通过远程数据传输技术、云处理技术等发送给后台终端存储,并设计算法对驾驶人的驾驶风格等信息进行基于传统处理器或云计算技术的分析监测,形成驾驶风格分析报告,实现远程交互式离线反馈,提升行车安全性。其应用领域主要包括智能网联汽车个性化定制(面向驾驶安全辅助ADAS等智能系统的个性化设定及拟人化驾驶)、车队运营风险管理(面向运输或公交车队)、风险投保量身定制(面向保险公司的精细化保险对策)、驾驶培训辅助(面向公交和驾校的驾驶培训)等。本书主要关注在获得驾驶人历史行车数据的前提下如何对驾驶风格进行评测。驾驶风格的量化评测既是车辆主动安全领域的瓶颈技术,又是智能网联车辆拟人化驾驶的理论基础及应用前沿。

图 1.31 驾驶风格研究应用的技术路线图
当前面向驾驶风格研究的数据采集方法主要有问卷调研法和客观驾驶数据分析法两种。其中,问卷调研法多基于自填式调查问卷,由于该方法主观性较强,被调查人可能更倾向于选择对自己有益或更被社会群体所接受的答案而刻意隐瞒真实的情况,问卷的有效性难以控制。 Shinar对 7 200 名驾驶人的调研数据进行分析,结果显示,驾驶人自评激进度显著低于他评激进度,驾驶人在很大程度上低估了自己驾驶行为的危险程度( Shinar,1998)。该方法缺乏客观数据支撑,评测结果的效度有限,故一般在实际的工程应用和研究中并不被采用。而客观驾驶数据分析法因数据可靠性强,可直观反映驾驶风格的表现特性等优点,更容易被研究学者所接受。在与驾驶风格相关的研究中,开展客观驾驶数据采集试验既可基于驾驶模拟器( Taubman-Ben-Ari,2012; Elvik,2013; Cho et al.,2006),也可基于实车道路试验(Paefgen et al.,2012; Johnson et al.,2011; Eren et al.,2012)。
总结驾驶风格的验证方法,主要包括事故绝对数法、事故率法、主观评价法等多种方法。 Cohen采用已发生的事故数量作为验证驾驶风格的标准(Cohen,2005),该方法简单、直观,可有效表征激进驾驶风格的安全风险,但评价周期很长,较难获取事故数量,特别是在我国道路交通事故统计等相关政策与执行不尽完善的前提下,又普遍存在交通违章记录由他人顶替的现象,严重制约了该方法的可实施性,交通事故数据的有效性有待进一步论证。相对地,主观评价法可行性强,有效度高,被广泛应用于驾驶风格的相关研究中。