
下载掌阅APP,畅读海量书库
立即打开



结构共用(Structure Sharing)的概念在早期研究中被定义为“利用同一物理结构体实现多个系统功能”,它反映了系统中结构数量与功能数量的对应关系,是产品开发概念设计中的四大共用技术之一 [3-5] 。其余三项分别为:功能共用(Function Sharing)、功能冗余(Structure Redundancy)和多模式集成(Multi-mode Integration)。其中,功能共用是指利用若干物理结构共同实现同一项功能;功能冗余是利用可互相替代的若干结构实现同一功能;多模式集成是指同一物理结构可分别实现可替换的不同功能。该四类技术的定义和区别可用图3.1表示。这里的结构是指由内部各要素组成的物理结构体,既包括单个零部件,也包括由多个零部件构成的复杂硬件装置或系统;功能是指系统作用于环境的能力,任何一个物理结构都需要在特定的使用环境中表现出其功能。从概念上理解,结构共用作为一种产品设计思想,具有优化系统硬件构成、降低系统硬件成本和提高系统资源利用率的作用,比较适用于复杂系统的总体设计和优化集成。
从结构共用的这一原始概念出发,不难发现我们在车辆系统的设计中有意识或无意识地用到了结构共用的思想。例如,在电动车辆中,驱动电机既可用于驱动车辆行驶,也可用于制动并实现能量回收;传统内燃机车辆中,发动机既可用于驱动,也可用于辅助制动,还可利用其散热为驾驶室供暖。在智能混合动力车辆中,利用前向雷达探测到前方车辆信息,既可用于车辆的主动安全控制,也可用于电动车辆的能量管理和节能优化控制。以上例子均反映了一个结构体实现多个系统功能的思想,属于结构共用概念的应用。从以上例子也可以看出,无论是将电机的能量流共用于车辆的驱动和制动,还是将前向雷达的信息流共用于车辆的主动安全和节能控制,均没有改变所用硬件装置的结构,只是充分利用了该硬件装置在不同使用环境中表现出的不同功能和作用。
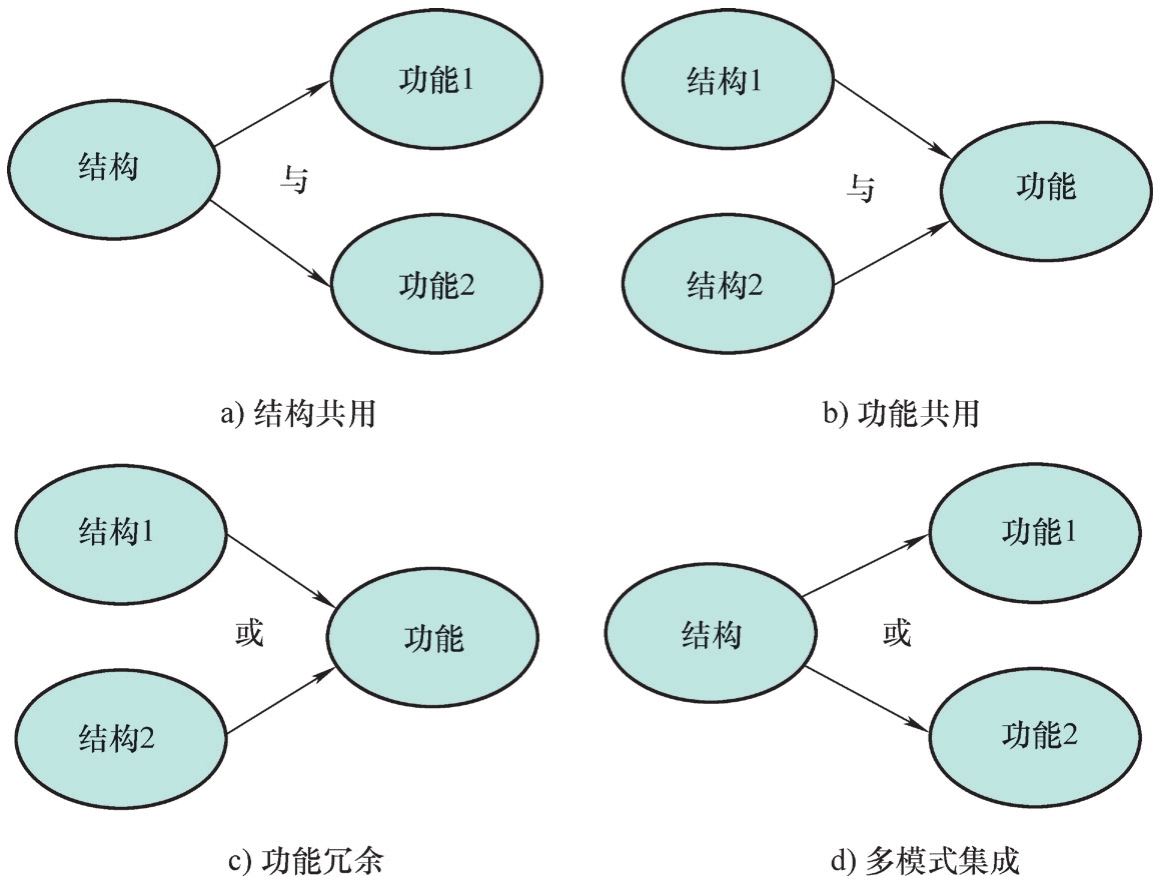
图3.1 四类共用技术的定义示意图 [2]
将结构共用的概念引入智能电动车辆领域,采用原始概念拓展与应用实例归纳的方法,提出智能电动车辆结构共用集成的如下定义:其是指在智能电动车辆系统集成中,充分利用系统中某硬件结构蕴含的物理特性,包括信息流、能量流和机械本体,实现系统多个功能或拓展其功能在不同子系统中应用,进而优化系统结构组成、提高系统综合性能的一种优化集成过程与方法。该定义将结构共用集成的概念界定在了智能电动车辆系统集成的范围之内,避免了对原有底盘设计的重构;将结构共用定位为一种优化集成方法,回答了“结构共用是什么”这一问题。该定义保留了结构共用原始定义中“利用同一结构,实现系统多个功能”的描述,又根据系统集成的特点,延伸了物理结构的含义,即不仅包括狭义上的机械结构,还包括机械本体(或硬件装置)产生的信息流和能量流,进而将“同一结构体在不同子系统中的不同功能表现”也归为结构共用。该定义涉及的关键词主要有:智能电动车辆、功能集成、物理结构、信息流、能量流、结构优化、功能拓展、集成方法等。
结构共用在概念上与功能集成比较接近。集成是指一些孤立的事物或元素通过某种方式改变原有的分散状态集中在一起产生联系,从而构成一个有机整体的过程;功能集成就是多个孤立的功能单元集成在一起,形成一个多功能体。从这个意义上讲,结构共用与功能集成的共同点是:功能集成或结构共用集成后的系统都能实现多功能性,都能减小系统尺寸和质量,都能提高资源利用率。两者的区别在于:结构共用是充分利用现有硬件结构的物理特性,实现多个功能;功能集成是通过功能合并与功能互补,将多个硬件结构有机组合在一起实现多个功能。前者没有改变原有主体结构,是在原有功能基础上通过功能拓展实现的,因此原有功能基本不受影响;而后者由于在组合过程中有可能改变了原有的结构,会带来原单个功能特性的下降。结构共用与功能集成的关系可以概括:功能集成的过程中包含了结构共用的思想,通过结构共用可以实现更为优化的系统集成。因此,结构共用集成是一种系统优化集成的方法。
结构共用与结构优化在实现目标上比较类似。结构优化设计是在给定的约束条件下,按照某种优化目标求出最好的设计方案。狭义上的结构优化一般是指结构本身的优化,复杂系统的结构优化还会考虑结构的形状及组合方式等。结构共用集成是在不改变系统中关键部件结构本体的前提下,通过优化组合各关键部件,合并重复的结构,减少结构冗余,实现系统的结构优化。因此,结构共用可以归类于一种广义上的结构优化方法。结构共用集成可应用于复杂系统的结构优化,通过合并功能重复的结构,实现系统构成的简化与优化,达到提高资源利用率、降低系统成本的目标。
根据结构共用集成的概念界定,结构共用在智能电动车辆中的应用主要包含两个方面:一是通过不同子系统共用同一物理结构或关键部件,减少配置冗余,实现结构的优化;二是提取系统中某硬件结构的物理特性,复用至其他子系统中,实现不增加额外硬件的前提下,提升系统综合性能。据此提出在智能驾驶系统中实现结构共用集成的两种方法:组合优化法和功能拓展(延伸)法。
(1)基于组合优化的结构共用集成实现
组合优化又称组合规划,是在给定有限集的所有具备某些特性的子集中,按某种目标找出一个最优子集的一类数学规划,它是一种通过对数学方法的研究去寻找处理离散事件的最优编排、分组、次序或筛选等问题的优化方法。组合优化实质上就是从有限个离散状态中选取最好的状态,在有限个可行解集中找出最优解。组合优化方法已广泛应用于复杂系统的结构优化设计,同样可以应用到电动车辆智能驾驶系统的结构共用集成中。
电动车辆智能驾驶系统集成了复杂的控制功能。传统功能叠加集成设计中,各子系统均基于其各自的功能需要,独立进行硬件的选型、布置与方案设计。而随着系统功能的不断增加,系统结构日益复杂,各子系统在其各自的独立设计和叠加过程中不可避免地会出现结构冗余。基于组合优化的结构共用集成实现方法,可以有效地整合冗余资源,保障系统综合性能的同时实现最佳的性价比,如图3.2所示。
基于组合优化的结构共用集成实现基本思想是:从系统总体功能出发,运用“功能需求定义→功能分解→结构映射→结构组合优化→结构共用”的技术路线,在满足系统总体功能需求的前提下,将系统总体功能自上而下分解至各功能单元,通过优化组合各子功能模块对应的结构单元,合并功能重叠的结构,实现结构共用。在该过程中,功能分解并向结构映射后形成的大量结构单元可以看作有限个可行解集,于是可将结构共用问题转化为组合优化问题,利用组合优化数学方法求解最优解,即是结构共用集成后的系统组成。
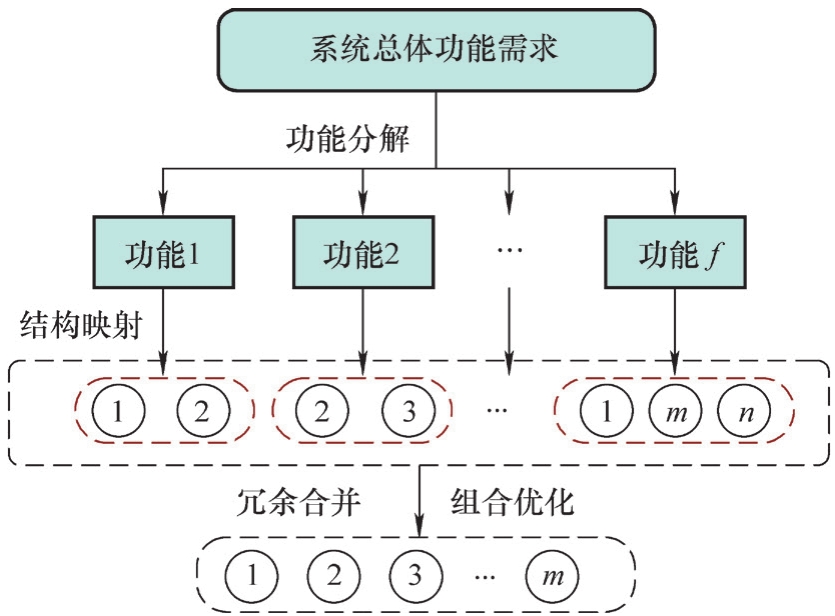
图3.2 基于组合优化的结构共用集成实现方法
该方法适用于电动车辆智能驾驶系统的结构优化设计,能通过合并重复功能的结构,减少结构冗余,简化系统结构组成,降低系统成本。
(2)基于功能拓展的结构共用集成实现
功能拓展也可称为功能延伸,是指将原系统中的某一物理结构复用至其他子系统或新的使用环境中,进而表现出新的功能或性能。此处的物理结构,不仅指机械硬件结构,还包括了物理结构产生的信息流和能量流。系统功能是系统在一定使用环境中所能表现出的作用和能力,是系统的外部联系,表现为物质流、信息流、能量流的输出和输入。因此,系统的功能与系统构成要素、系统结构、使用环境等密切相关。同一物理结构在不同的系统或使用环境中,可能会表现出不同的功能。充分利用系统中硬件结构的这一物理特性,复用至不同的子系统中,可以在复杂系统集成中实现结构共用。
电动车辆智能驾驶系统集成了大量的硬件结构和关键部件,在传统叠加集成设计中,这些物理结构分属于不同的子系统,并在其子系统中承担着一定的功能。提取其中某一硬件结构的物理特性,包括机械结构本体、能量流和信息流,应用到其他子系统中,就有可能表现出新的功能或用途,并以此来提高系统的性能。基于功能拓展的结构共用集成实现方法如图3.3所示。
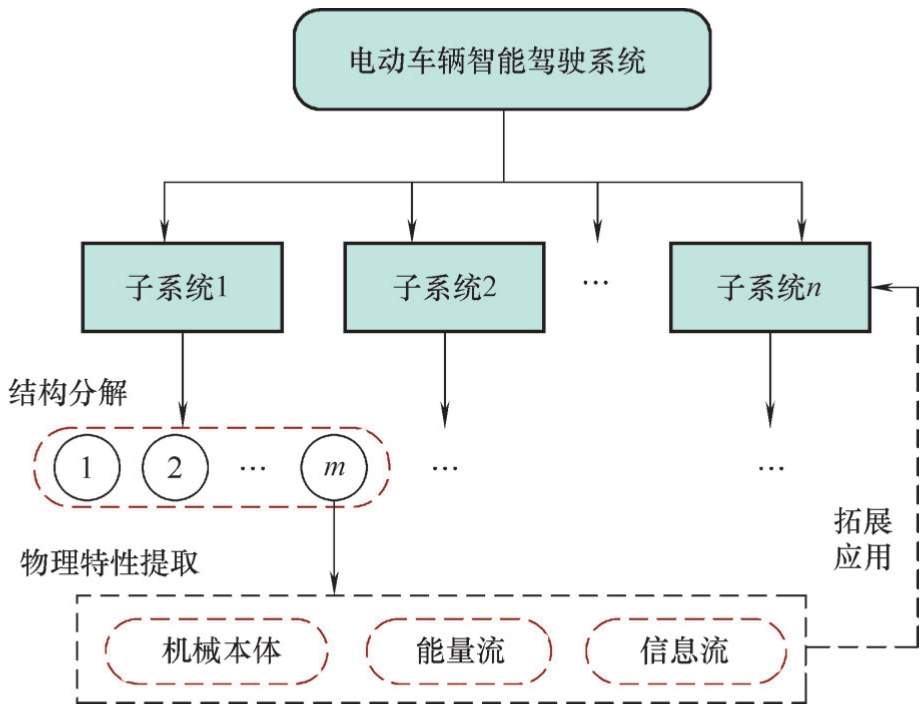
图3.3 基于功能拓展的结构共用集成实现方法
基于功能拓展的结构共用集成实现方法基本思想是,以原系统为基础,采用“原系统结构分解→结构单元物理特性提取→新系统使用环境下功能拓展→结构共用”的技术路线,在不增加物理结构的前提下,充分利用原有系统硬件结构的物理特性,拓展、延伸应用至其他子系统,来提升系统集成后的总体性能。
该方法适用于电动车辆智能驾驶系统的功能集成优化,通过拓展物理结构的功能应用,提高系统综合性能。