
下载掌阅APP,畅读海量书库
立即打开



智能环境友好型车辆系统包括多传感系统、混合电驱动系统、电控制动系统、复合传动系统、主动转向系统和主动悬架系统,以实现包括纵、横向驾驶辅助,一体化安全控制以及最优能量分配等功能,并最终达到安全舒适与节能环保的综合目标。相比于现有的智能汽车与新能源汽车,智能环境友好型车辆具有结构复杂、功能复杂和目标多样的系统特点。针对i-EFV所涉及的系统结构复杂、识别信息多样、控制系统耦合等难点问题,提出结构共用、信息融合与控制协同的i-EFV三大关键技术。其中,结构共用解决i-EFV复杂系统结构集成、优化及其功能安全的硬件设计问题,信息融合处理“人-车-路”复杂信息识别及预测的信号处理问题,控制协同解决安全、舒适、节能与环保多目标协调,纵向、横向驾驶辅助、一体化安全控制等多行驶模式协调以及复杂“机-电-液”耦合多系统动态协调的综合控制问题,如图2.6所示。
结构共用是研究利用同一结构、实现多个系统功能的一项基础技术,是共用技术的重要研究内容之一。结构共用通过冗余结构的简化与整体系统方案的优化,以最少的结构和最低的成本实现最多的系统功能和最高的效率。智能环境友好型车辆复杂的执行与传感系统需要进行结构共用优化,关键技术包括:①针对i-EFV复杂的车辆执行部件结构,重点解决复杂“机-电-液”系统结构的集成及优化设计问题,需要进行执行部件的结构共用设计;②针对i-EFV多传感系统冗余特性,重点解决复杂传感系统组成、布置等优化设计问题,需要进行多传感系统的结构共用设计;③针对i-EFV整车多样的行驶任务,重点解决不同行驶任务下执行部件与传感系统的共用设计问题;④针对结构共用下的系统结构及组成特点,重点解决多系统协同工作时整车及其执行部件的安全与可靠性设计问题。
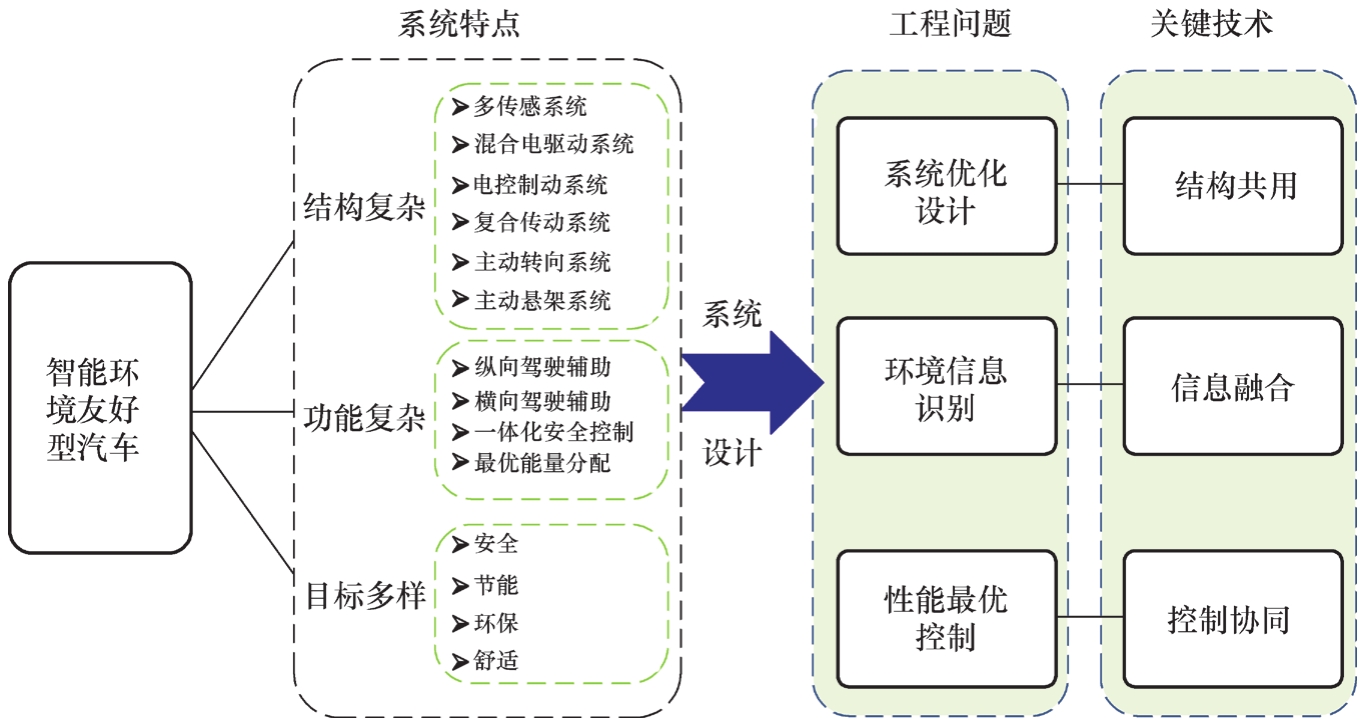
图2.6 i-EFV的关键技术体系
信息融合是指将多源交互信息在空间和时间上的互补与冗余组合优化,产生对于观测环境的一致性描述。全面并且一致地对车辆状态与环境状态进行识别,是智能环境友好型车辆进行安全节能控制的必备信息基础。面向在信息提取及融合过程中的实际问题,综合考虑智能信息交互系统组成特点、整车优化控制的需求,智能环境友好型车辆的信息融合技术可分为三个层次,分别是目标信息识别、“人-车-路”特征提取以及车辆状态预期。其中,目标信息识别重点解决在实际行驶过程中复杂多变的环境下,传感器系统对测量目标的识别准确性问题,包括自车信息、邻车信息、车车与车路通信获取的相关信息、前方交通信息等;“人-车-路”特征提取,是在已经识别目标信息后,进行数据分析并利用多传感器融合理论,实现对交通信息、邻车信息等的运动数据分析以及对自车状态参量进行数据融合;车辆状态预期,基于对已采集的信息的分析结果,融合i-EFV系统模型,对整车的安全、舒适、节能与环保性能进行评估与预测,作为控制过程的目标输入,并对未来的行驶过程进行预测。
控制协同旨在综合安全、节能、环保和舒适等多目标,协调整车驱动、制动、转向、悬架等多系统,实现i-EFV优化的车辆性能。其需要解决两个基本问题:i-EFV复杂机电系统的耦合机理与“人-车-路”广义机械动力学行为建模分析;i-EFV多目标及多系统协同的动力学综合控制。
“人-车-路”广义机械动力学行为建模,是为解决对于i-EFV复杂机电系统在多系统耦合下的动力学行为机理、特性以及对由此产生的动力学问题尚缺乏清晰认识的问题。重点研究“人-车-路”复杂系统的运动及相互作用机理,以及在已有分析结果的基础上,对“人-车-路”广义机械动力学系统进行建模。
结构共用、信息融合与控制协同三大技术,构成了i-EFV系统设计、车辆及环境信息识别以及车辆综合优化控制的关键技术体系。这三项关键技术并不是独立存在的,而是相互联系,相互支撑,构成一个循环、优化的有机整体。如图2.7所示,结构共用技术着眼于执行系统、传感系统的结构优化设计,而设计的过程以信息融合所提供的识别信息需求、信息处理方法以及控制协同提供的车辆控制功能与控制方式等为基础;信息融合用于i-EFV复杂系统及环境信息的综合处理问题,而该过程需要结构共用提供优化的系统结构以及控制协同提供的“人-车-路”系统模型与整车控制特征等作为基础;控制协同着眼于系统的综合优化控制,需要结构共用提供的系统结构特征、信息融合提供的车辆及环境信息等作为支撑。
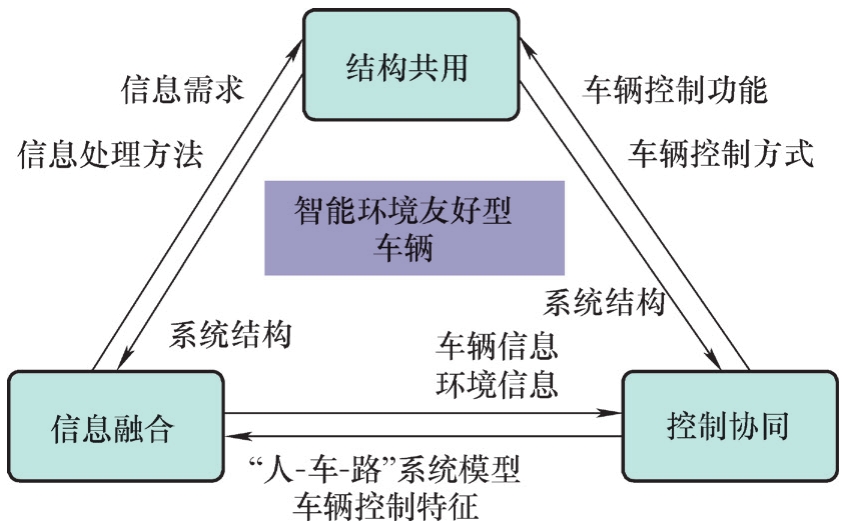
图2.7 i-EFV关键技术耦合关系示意图
要实现i-EFV安全、节能、环保、舒适的行驶目标,需要解决其传感与执行等复杂机电系统的结构设计与优化、运行过程中复杂环境信息识别和整车性能优化控制等重点工程问题,这需要依赖结构共用、信息融合与控制协同三大关键技术的支撑。而这三大关键技术的开发,则需要探索和解决i-EFV“人-车-路”广义机械动力学系统中多物理过程及多系统耦合的复杂系统动力学行为产生机理、复杂机电系统多系统、多目标协同控制理论和车辆传感与执行系统结构共用设计理论、车辆多源传感信息融合理论等多学科交叉融合的基础科学问题。i-EFV的基础理论与关键技术体系架构如图2.8所示。
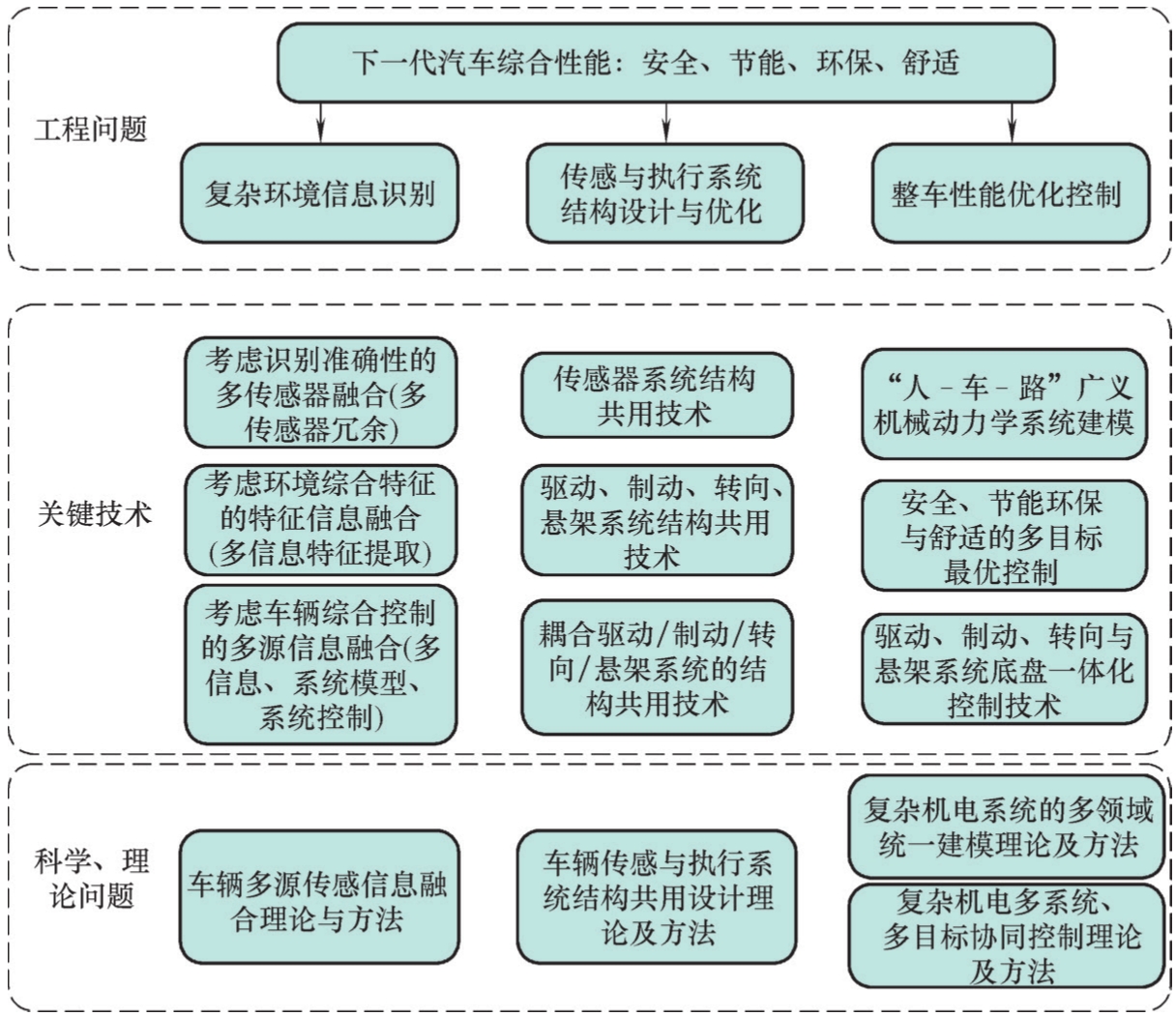
图2.8 i-EFV的基础理论与关键技术体系架构