
下载掌阅APP,畅读海量书库
立即打开



对于i-EFV这样一个复杂的机电系统,其物理结构更复杂、集成度更高、动力学耦合关系更多变。如何在复杂的交通环境下,对由驾驶员、车辆和道路组成的广义机械动力学系统以及新型清洁能源动力系统、电控化底盘系统组成的耦合系统进行动力学特性与产生机理分析,寻找和建立不同领域统一、柔性的广义机械动力学系统模型,使其准确表达跨领域的耦合机制以及系统的全局特性,是智能环境友好型车辆研究的核心问题之一。
另外,目前车辆动力学问题的控制原理及决策,主要集中于对各重要性能的分别研究,如车辆行驶安全性、燃油经济性、排放性能控制以及行驶舒适性等,这些方法虽能较好地解决单一动力学问题,但难以合理解决复杂系统耦合下的行驶性能综合保障问题,如同时考虑驾驶员、车辆和道路的行驶安全性、燃油经济性与乘坐舒适性的多目标协同问题。如何将i-EFV的驾驶员-车辆-道路作为一个有机整体,考虑在多系统耦合下的系统动力学特性,并实现行驶协同控制,这也是复杂机电系统动力学性能动态匹配研究领域最具挑战性的问题之一。
i-EFV通过传感与通信系统基于车际短程通信、远程通信以及车载传感器之间的信息流动,获取并交互车辆与环境信息,基于传感与通信系统所获取的数据,进行多源信息的综合处理,实现对于车辆与环境的准确识别与预测。在此基础上根据车辆与环境的识别及预期信息,进行车辆的一体化控制决策,并通过动力与底盘系统各部件之间的能量流动控制车辆按照预期的目标运动,从而保证安全、舒适、节能与环保的运行性能。除了具备传统的新能源车辆平台的复杂机电系统的属性之外,i-EFV作为智能化、网联化等新兴技术的集成体,同时又表现为泛在传感和信息交互网络的移动节点、道路交通网络的移动智能单元、能源网络的移动存储单元等特性。因此,从交通的层面看,i-EFV的运行过程实际上是“人-车-路”耦合的复杂机电系统中多物理过程的耦合,其安全、舒适、节能与环保的运行性能,本质上是保障其运行环境及自身各系统中信息流、能量流、物质流的最佳流动。如图2.1所示,由驾驶员-i-EFV-道路所组成的“人-车-路”广义机械动力学系统,通过相互耦合、关联与反馈作用,形成一个有机的整体。基于其相互作用机制,“人-车-路”耦合广义机械动力学系统能够解耦为“人-车”“人-路”“车-路”交互作用的信息、能量耦合动力学系统。从相互作用的介质来区分,驾驶员与i-EFV实时进行能量与信息的双向交互,道路对驾驶员实时进行信息的单向交互,车辆对道路实时进行能量单向交互,而道路对i-EFV进行实时的能量、信息交互。
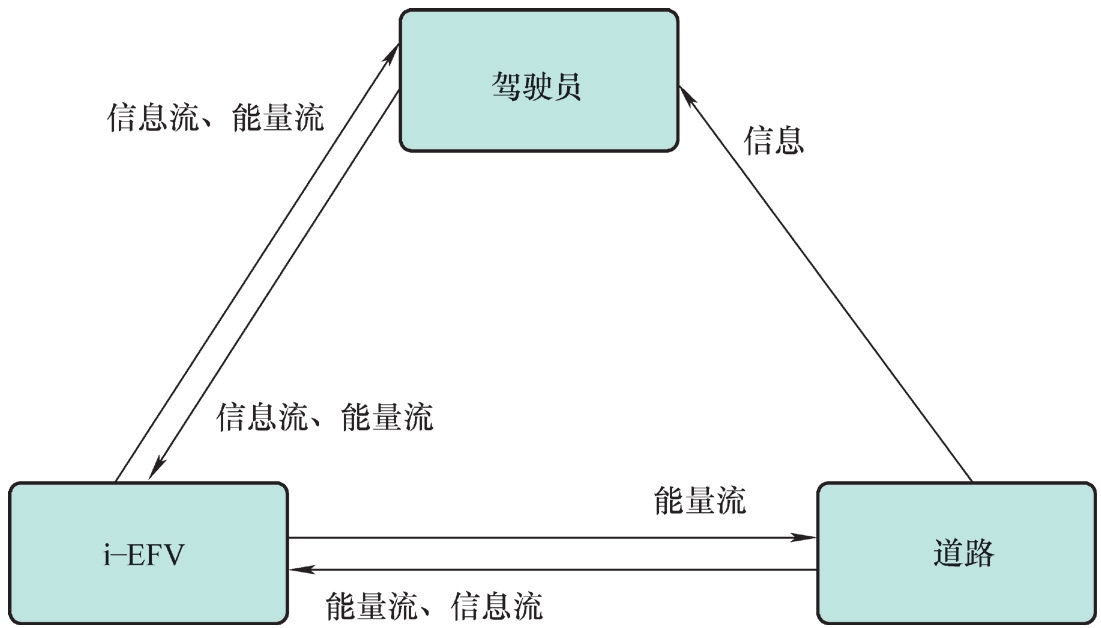
图2.1 “人-车-路”大系统多物理过程广义耦合结构
从单车运行控制的层面,i-EFV沿道路前进方向行驶的纵向运动、横向运动和垂向运动及绕车辆坐标轴的三个方向的转动(侧倾、俯仰、横摆运动)相互关联、相互影响,其最终运动体现为整车上驱动、制动、转向、悬架等“机-电-液-气”耦合的复杂零部件系统综合作用的结果,这也是信息流、能量流在i-EFV的多个机电系统中优化配置的相互耦合的多物理过程,如图2.2所示。
“人-车-路”系统中各要素间的耦合主要包含人-机(辅助驾驶系统)耦合、人-路耦合、车-路耦合及i-EFV各系统中的机电耦合、动力耦合等。i-EFV本身作为机电系统集成的产品,其内部具有固有的智能辅助驾驶、多动力源混合驱动、机械传动、电液复合制动等各个阶段的多物理过程耦合特性,i-EFV运动及其综合控制所涉及的“人-车-路”广义机械动力学系统中,系统综合效率与各部件效率特性也相互耦合,如图2.3所示。
在i-EFV运行的“人-车-路”大系统中,车辆、驾驶员及道路环境在构成及行为特征方面都具有复杂的非线性动力学特性,且相互之间存在非线性约束、耦合的特点。车辆操控和运动过程中驾驶员-车辆-道路系统存在能量传递耦合、信息交互关系等非线性动力学传递特性、信息交互关系以及受交互单元、介质和界面影响的运行规律和演变机制;因而体现为车辆、交通和通信层面的车辆系统动力学、交通流动力学和网络拓扑动力学复杂耦合的广义机械动力学系统,如图2.4所示。
探讨“人-车-路”系统的能量传递耦合机理,分析车辆与道路动力学状态及参数变化情况下驾驶员操作特性、反应特性及心理特性的变化,理解驾驶员特性变化对车辆动力学状态的影响规律;揭示车间相对距离、相对速度及加速度与外界环境因素之间的相互约束特性,以及由于车辆之间动力学耦合关系引发的“人-车-路”系统的非线性环节;探索驾驶员反应迟滞及车辆、道路不确定参数变化作用下“人-车-路”耦合动力学系统出现的分岔、突变等非线性动力演变机制,是i-EFV广义机械动力学复杂耦合系统的关键基础问题。
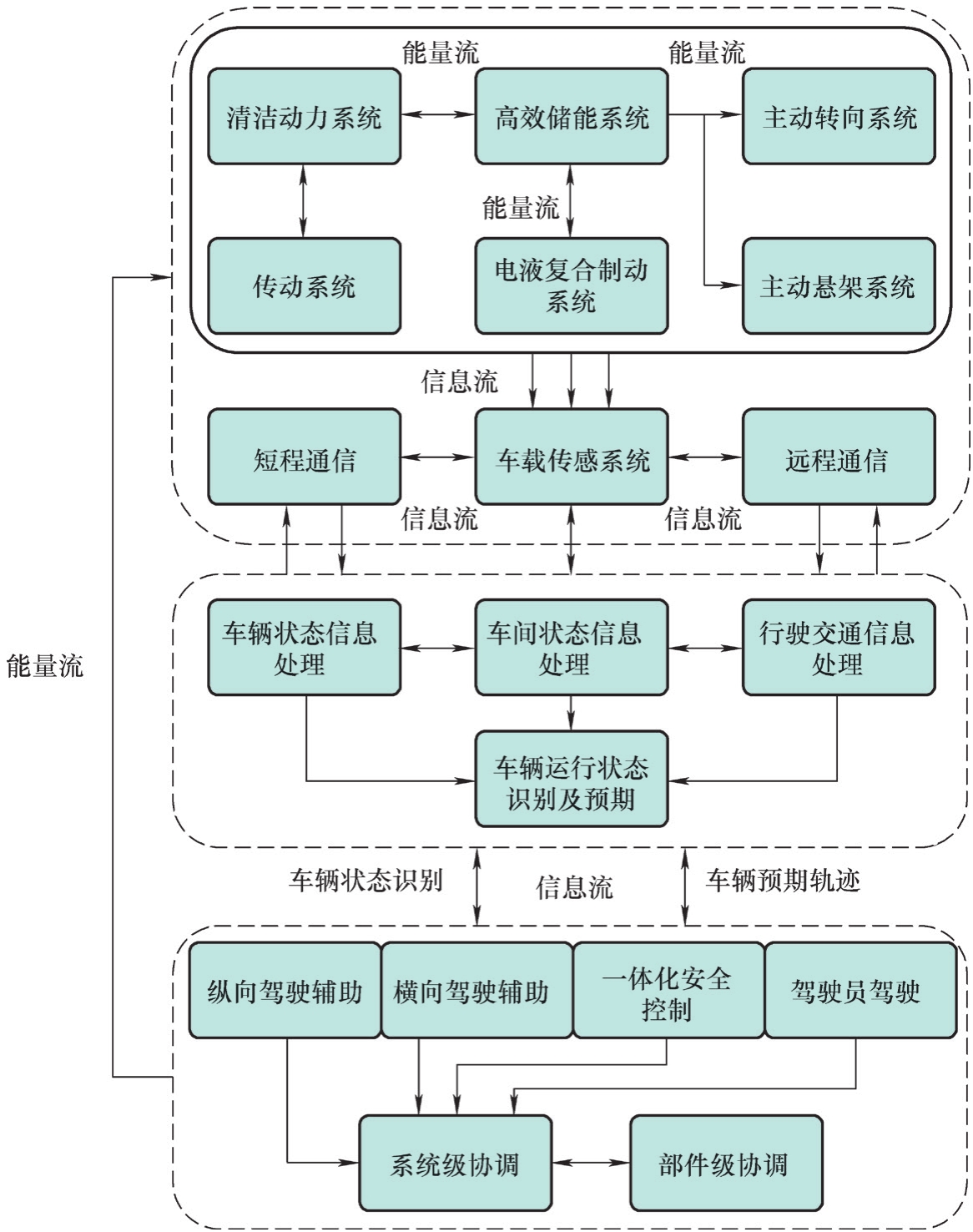
图2.2 i-EFV多机电系统多物理过程耦合结构
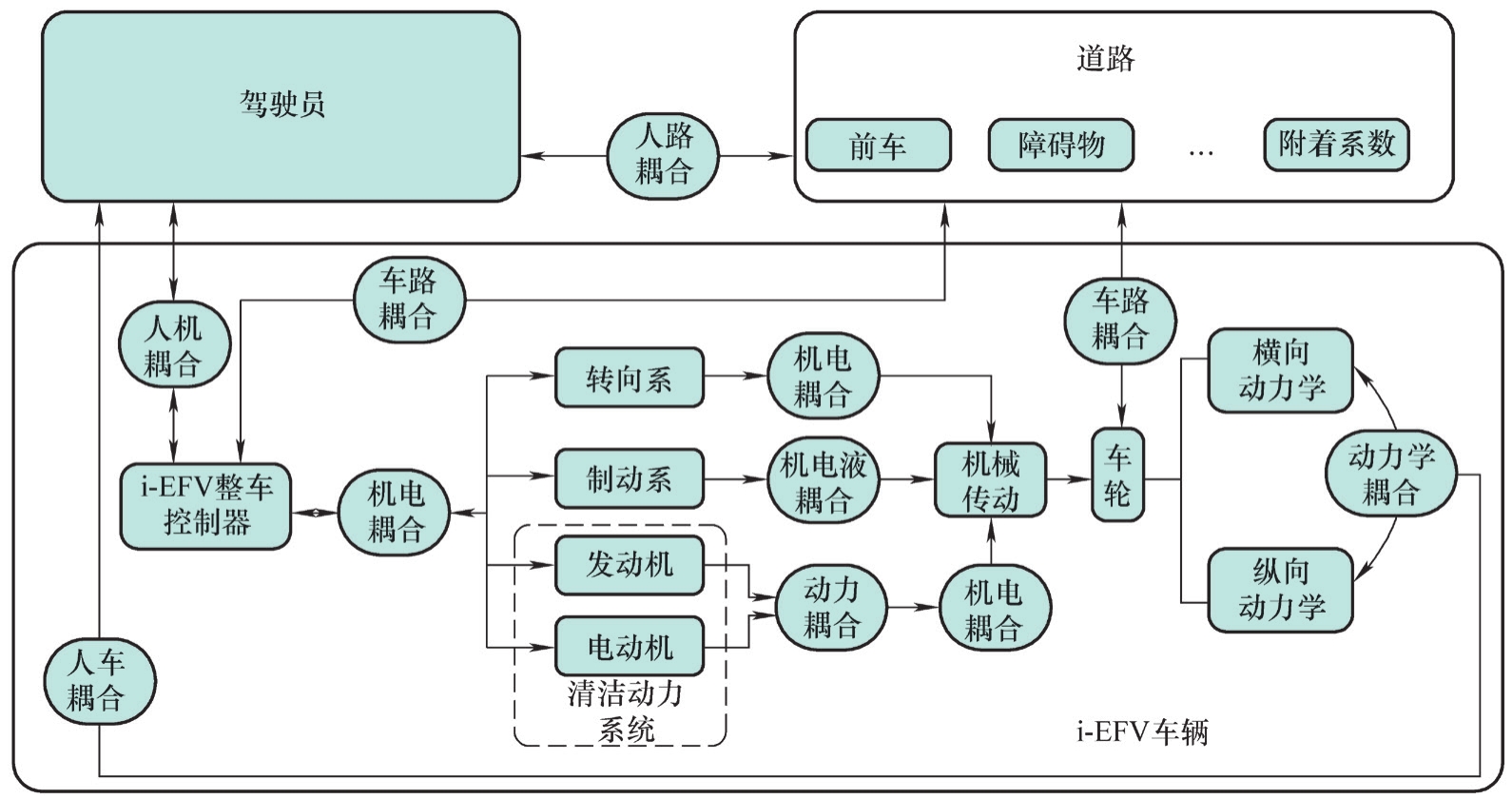
图2.3 i-EFV广义大系统的耦合特性
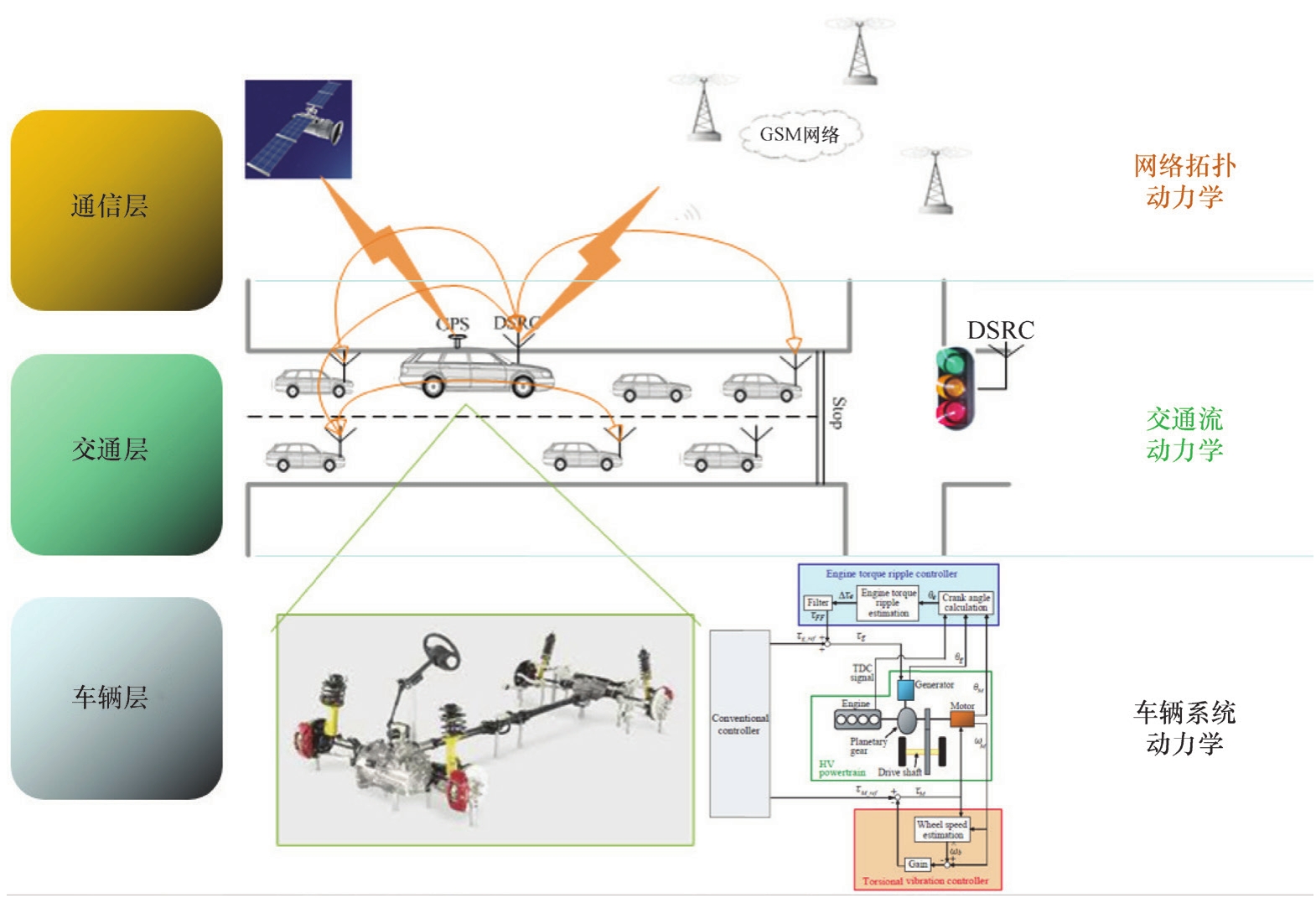
图2.4 “人-车-路”动力学系统的耦合
现有常规车辆动力学行为的产生机理及特性研究,主要针对某个方面或单一系统的独立研究,虽然能对传统车辆整车和部件的动力学行为机理及特性进行深入了解,但对于“人-车-路”复杂多系统在多物理过程和多系统耦合机制下的动力学行为机理、特性(图2.5)以及由此产生的新的动力学问题尚缺乏清楚的认识。因此,对于结构更复杂、集成度更高、耦合关系更多变的智能环境友好型车辆i-EFV而言,研究在复杂交通环境下,复杂机电系统的多领域统一建模理论与多系统多目标协同控制方法,使其具有能清晰表达系统的跨能域耦合机制并能描述系统的全局特性,是下一代汽车动力学研究的核心问题之一。

图2.5 i-EFV复杂系统动力学行为产生机理
对智能环境友好型车辆(i-EFV)动力学问题的研究,与智能汽车(IV)和新能源汽车(NEV)等不同对象相关,而其基础理论与共性关键技术的研究主要涉及复杂机电系统动力学机理分析、系统建模以及动力学控制等领域。
1.“人-车-路”广义机械动力学系统建模
现有传统车辆动力学行为的产生机理及建模技术研究,主要集中在动力系统、底盘系统和车身三大系统在行驶时的强度、刚度、可靠性和耐久性等的实验或CAD/CAE分析,车辆传动、转向、悬架、制动及车轮等动力学子系统的有限元建模及动态响应特性分析,以及整车动力学特性的研究等方面。这些针对某个方面或单一系统的独立研究,虽然能对传统车辆整车和部件的动力学行为机理及特性进行深入了解,但对于i-EFV复杂机电系统在多系统耦合下的动力学行为机理、特性以及由此产生的新的动力学问题尚缺乏清楚的认识。因此对于系统结构更为复杂、集成度更高、车辆系统更为耦合的i-EFV而言,如何在复杂交通环境下对驾驶员、车辆和道路组成的“人-车-路”广义机械动力学系统以及新型清洁能源动力系统与电控化底盘系统组成的“机-电-液”耦合系统进行动力学特性与产生机理分析,研究复杂机电系统的统一建模理论与方法,寻找和建立统一、柔性的车辆复杂机电系统模型,使其能清晰表达系统的耦合机制并描述系统的全局特性,是i-EFV汽车动力学研究的核心问题之一。
进行i-EFV的“人-车-路”广义机械动力学行为建模,首先要求针对驾驶员、i-EFV、道路特征及相互作用机理进行深入的分析,在此基础上才能进一步进行“人-车-路”广义机械动力学系统的一体化建模。因此,i-EFV的“人-车-路”广义机械动力学行为建模主要着眼于以下两个方面研究内容。
(1)“人-车-路”复杂系统的运动及相互作用机理分析
在复杂道路交通环境下行驶时,i-EFV可能存在智能辅助驾驶、整车一体化安全控制、电驱动、油电混合驱动及制动能量回收等多运动过程,驾驶员面对时变交通环境、多样车辆工作模式,会采取相应的驾驶操作甚至应激反应,同时驾驶员、车辆和道路等多个系统之间系统耦合且相互制约,研究复杂系统耦合的该类车辆行驶运动产生机理是实现车辆综合控制的基础。
综合分析与i-EFV车辆安全、舒适、节能与环保等性能相关的车辆行驶运动特性,需重点以下研究内容:①不同行驶工况下,i-EFV车辆多体动力学特性、多源能量系统综合效率特性;②多自由度车辆运动过程中驾驶员与车辆之间相互作用、影响下的i-EFV纵/横向动力学行为规律;③不同交通环境与车辆状态下,驾驶员纵向/转向行为特性;④车辆与道路交通环境状态参数变化引起的驾驶员行为反应特征,突变工况下驾驶员应激响应特性;⑤驾驶员操作与道路状态变化耦合作用下,i-EFV及车-车间非线性纵/横向运动学耦合特点以及驾驶员-车辆-道路动力学闭环系统的信息、能量传递与转换机理。
(2)“人-车-路”广义机械动力学行为特性建模
由于i-EFV复杂系统动力学控制不仅涉及车辆行驶动力学的建模,还需要考虑驾驶员的驾驶习惯、行为特性以及车辆行驶的道路状况和交通环境,因此i-EFV系统综合建模涉及由驾驶员、车辆以及行驶交通环境三者所组成的闭环广义机械系统。
在研究其动力学耦合机理的基础上,开展“人-车-路”复杂耦合系统统一建模的研究,应重点包含以下研究内容:①探索“人-车-路”不同类型对象系统的融合体系框架及联合建模方法;②基于经验和实验数据的驾驶员行为特性建模方法;③考虑车辆动力学系统时滞、时变、耦合、多输入多输出及强非线性特性的复杂动力学行为状态空间方程描述;④“人-车-路”广义机械闭环耦合系统信息流及能量流传递与转换数学建模;⑤考虑微观道路及宏观交通分层及不确定性关系的“人-车-路”广义机械闭环耦合动力学系统模型全局数学描述方法。
2.多目标及多系统协同的动力学综合控制
普通的车辆动力学控制原理及决策主要集中于对各重要性能的分别研究,如车辆行驶安全性、燃油经济性、排放性能控制以及与行驶舒适性相关的行驶噪声和振动性能控制等,这些方法虽能较好地解决相关单一动力学问题,但难以全面、协同地解决i-EFV复杂系统耦合下的动力学综合问题,如综合考虑驾驶员、车辆和道路的行驶安全性、燃油经济性与乘坐舒适性的多目标协同问题,整车驱动、制动、悬架与转向等多系统协同问题。
一方面,i-EFV要求综合实现安全、舒适、节能与环保的控制目标;另一方面,i-EFV行驶模式多样,包含如纵向/横向辅助驾驶、考虑车辆与行驶环境的“人-车-路”一体化安全控制等不同的行驶模式;同时,i-EFV集成了复杂的“机械-电子-液压”耦合系统。
i-EFV车辆具有被控对象耦合、控制功能多样、车辆对象复杂等特点,如何将i-EFV的“人-车-路”作为一个有机整体,综合考虑在多运动过程及多系统耦合下的复杂系统动力学特性,实现多目标及多系统协同的最优动力学控制,这是集成复杂机电系统的i-EFV动力学控制的另一重要研究课题。针对上述i-EFV多目标、多模式与多系统协同控制的需求,要求建立i-EFV完整的控制系统架构和理论体系。
针对“i-EFV多物理过程系统耦合机制及其动力学行为产生机理与建模方法”与“复杂机电系统多目标及多系统协同控制理论与方法”这两大科学问题,有如下3项需要重点研究的内容:
(1)i-EFV“人-车-路”复杂机电系统多物理过程及多系统耦合的行驶纵向运动产生机理
复杂道路交通环境下行驶时,智能环境友好型车辆包含智能辅助驾驶、电驱动、内燃机驱动、油电混合驱动及制动能量回收等多物理过程,同时驾驶员、车辆和道路等多个系统之间存在非线性耦合与制约关系,研究基于复杂系统多物理过程及多系统耦合的车辆行驶运动机理是实现车辆综合性能控制的基础。聚焦于行驶安全保障、燃油经济性、乘坐舒适性等重要性能,在研究不同行驶工况下车辆多体动力学特性、驾驶员操作行为、人-车和车-路耦合动力学特性的基础上,重点探索“人-车-路”广义机械动力学系统在考虑多自由度运动过程中驾驶员与车辆之间相互作用、影响下的行驶纵向动力学行为规律;车辆与道路动力学状态参数变化引起的驾驶员行为反应特征。
(2)i-EFV“人-车-路”广义机械动力学系统的运动状态识别与多领域统一建模理论及方法
i-EFV中,“人-车-路”广义机械动力学系统状态的准确识别,是对i-EFV的驾驶员驾驶特性、车辆动力学状态、车间运动学状态以及路面状态的识别方法开展研究,探讨驾驶员稳态及动态跟车行为动力学特性、驾驶员接近前车行为以及异常行为特性的识别方法;研究多系统融合车速估计、车辆横摆角速度冗余估计及状态估计的模型参数自适应方法;探索实时性好、准确度高的路面附着系数、道路曲率等参数的辨识方法。
由于智能环境友好型车辆复杂系统动力学控制不仅涉及车辆行驶动力学单一领域建模,而且需要考虑驾驶员的驾驶习惯和行为特性,以及车辆行驶的道路状况和交通环境,因此针对新概念车辆所涉及的由驾驶员、车辆以及行驶交通环境三者所组成的闭环广义机械系统,在研究其动力学耦合机理和辨识其动力学特性的基础上,需重点研究“人-车-路”复杂耦合系统多领域统一建模。探索“人-车-路”不同类型对象系统的体系融合、框架构建及联合建模方法;基于经验和实验数据的驾驶员行为特性建模方法;考虑车辆动力学系统时滞、时变、耦合、多输入多输出及强非线性特性的复杂动力学行为状态空间方程描述。
(3)考虑“人-车-路”耦合特性的车辆行驶纵向运动多性能目标协同控制方法
智能环境友好型车辆的行驶运动控制,需要同时满足安全、节能、环保及舒适等多个性能目标,然而上述不同类型的多个性能目标之间必定存在相互的约束条件和耦合关系。因此,在充分考虑驾驶员的行为特性并结合车辆实时状态以及道路环境变化的基础上,智能环境友好型车辆控制系统能实现针对以上不同类型多性能指标的实时调度与协调优化。要达到这样的目的,需重点研究具有复杂耦合特性“人-车-路”集总和分散相结合的多系统、多物理过程和多目标的协同控制结构;探索行驶安全保障目标、加速性能目标、燃油经济性目标和驾驶员感受目标的数学量化方法和多性能优化目标协同设计,多性能目标协同控制优化方法。