
下载掌阅APP,畅读海量书库
立即打开



假设 k 时刻,跟踪波门内过门限的量测共 m k 个,这些数据的集合 [111] 表示为
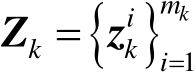
(2-5)
式(2-5)中,第 i ( i =1,…, m k )个量测的观测模型可写为
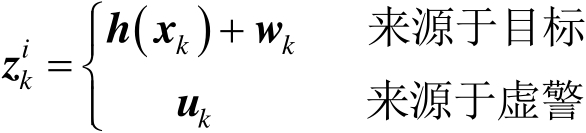
(2-6)
式中, h (·)表示观测函数; w k 为 k 时刻的测量误差,协方差矩阵为 R k 。
假设虚警在整个波门内服从均匀分布,因此
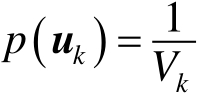
(2-7)
式中, V k 表示 k 时刻跟踪波门的大小 [112] 。
一般来说,式(2-5)和式(2-6)给出了密集杂波环境下目标的观测模型。 k 时刻,虽然跟踪波门内有 m k 个过门限的量测,但并不知道每个数据的来源(可能来源于目标,也可能来源于虚警)。解决此类目标跟踪问题的算法有很多,其中比较有代表性的是PDA算法。2.3节将首先介绍经典PDA算法,然后利用贝叶斯准则对算法的检测过程进行修改,达到提升检测概率和跟踪性能的目的。