
下载掌阅APP,畅读海量书库
立即打开



杂波中的目标跟踪对于实际应用非常重要 [12-17] 。在目标跟踪过程中,雷达将获取包括目标量测和虚警的量测集合。因此,如何有效地使用这些量测是实现精确状态估计的关键问题 [10-11] 。针对这个问题,许多算法已经被研究,概率数据关联(PDA)滤波器就是其中的经典算法之一,它使用具有相应权重的一组量测来更新目标航迹 [18-20] 。
然而,上述算法都是将目标检测看作一个独立的过程。检测中心在完成波门内回波数据的检测后,将过门限的点迹信息传送给跟踪器进行数据关联(见图2.1实线)。若能将跟踪器的输出信息反馈至检测中心(见图2.1虚线),检测中心再根据反馈信息设置波门内检测门限(本章将这个过程称为检测跟踪联合处理过程),那么算法的性能将会得到提升 [21-24] 。
通常,现有检测跟踪联合处理方法,根据反馈信息种类,大致可分为两种:直接反馈检测门限;反馈目标位置的预测信息。
在第一种类型中,文献 [21] 在PDA算法的基础上,以检测概率、虚警概率为自变量,在最优化目标跟踪精度的前提下,求解并反馈检测门限,然而在实际中,优化函数的求解需要使用蒙特卡罗积分,难以满足实时性的需求。文献 [22-23] 对前文进行了一定的假设和近似,并在NP准则下给出了检测门限设置的闭式解。
第二种类型由Peter Willett于2001年提出 [24] ,其反馈先验信息为跟踪器反馈的目标预测位置信息,服从高斯分布。利用高斯分布的特性,并结合门限设置的物理意义,将门限设置的规则定为:越靠近高斯分布的中心,检测门限越低;越远离高斯分布的中心,检测门限越高,从而使检测跟踪联合处理方法具备在恒虚警条件下提升目标检测概率的能力。
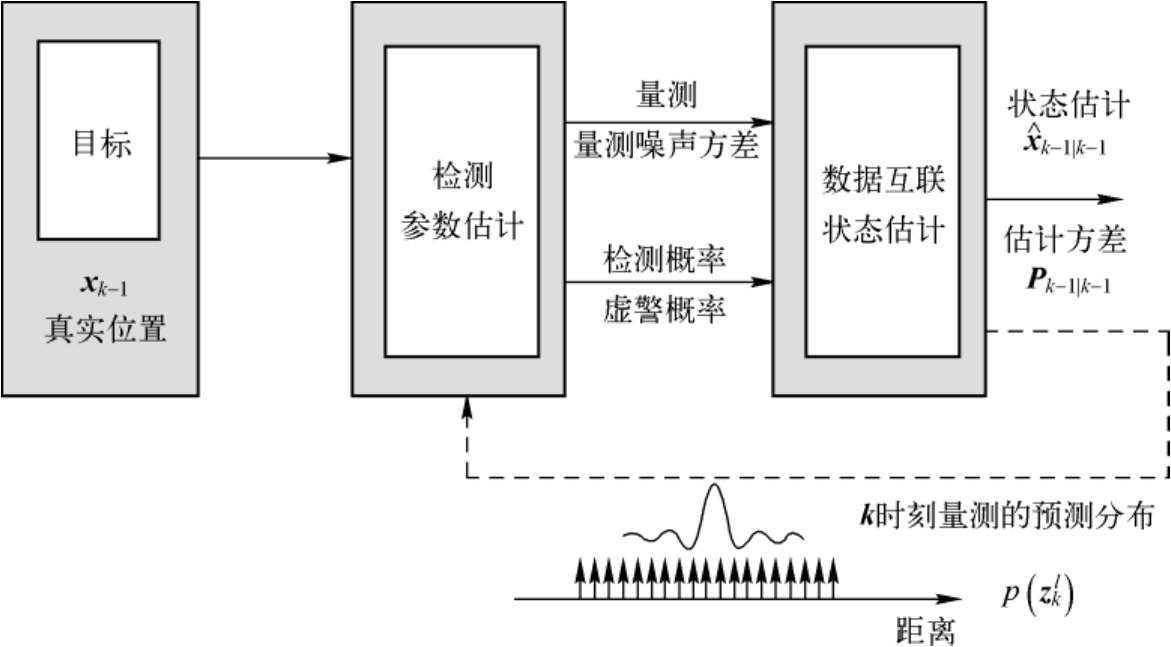
图2.1 检测跟踪联合处理过程
上述算法将检测和跟踪过程进行了联合处理,有效提升了PDA算法的跟踪性能。但是,从原理上来讲,雷达可以通过提升虚警概率(降低检测门限)来提升算法性能。在这种情况下,当跟踪波门面积增大时,门限降低会带来更多虚警,进而增加超过检测门限的量测导致计算机过载。针对这个缺点,本节给出了波门内平均虚警概率的定义,提出了一种具有恒虚警性质的检测跟踪联合处理算法,简称JDTP-PDA(Joint Detection and Tracking Processing PDA)算法。与发射端的认知处理算法不同 [48,51,53] ,这种算法相当于是在雷达接收端的一种认知处理方式,目的是在波门内平均虚警概率恒定的前提下,提升目标的平均检测概率和系统的跟踪性能。
本章其他内容分为如下部分:
2.2节建立了密集杂波环境下目标跟踪的状态和观测模型;
2.3节将反馈的跟踪信息作为检测器的先验信息,在贝叶斯最小平均错误概率准则下给出了似然比检验的判决表达式,并推导了算法在跟踪波门内的平均检测概率和虚警概率;
2.4节将平均检测概率和虚警概率代入PDA算法关联概率的计算公式,获得JDTP-PDA算法的流程;
2.5节从物理意义上解释了JDTP-PDA算法的原理,并验证了有效性。