下载掌阅APP,畅读海量书库
立即打开



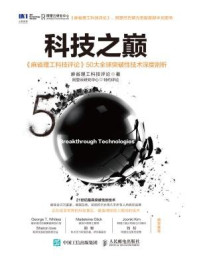
与传统模糊系统一样,图3.4.1的Mamdani时空模糊系统主要包括模糊化、规则库、模糊推理及去模糊化四个模块。因为此模糊系统包含空间信息,所以其输出是无限维的。如果针对有限维输出(不包含空间信息)情形,只需要在去模糊化模块后,增加一个空间信息集成模块,如图3.4.2所示。为了便于理解,我们将去模糊化和空间信息集成两个模块合并为输出处理模块。考虑到时空模糊集合的特点,下面将详细论述时空模糊系统中一些具体的运算过程。

图3.4.1 Mamdani时空模糊系统:无限维输出

图3.4.2 Mamdani时空模糊系统:有限维输出1
类似传统模糊化模块,Mamdani时空模糊系统中的模糊化模块也主要有两种不同的模糊器:单值模糊器和非单值模糊器。
定义3.12
(单值模糊器) 令
A
是时空模糊集合,
ξ
∈
 是精确值,且
是精确值,且
 是空间位置。单值模糊器针对任意空间位置
是空间位置。单值模糊器针对任意空间位置
 ,将
中的
ξ
映射到
A
,如果对于
,将
中的
ξ
映射到
A
,如果对于
 ,
ξ
=
ξ
′
,有
,
ξ
=
ξ
′
,有
 ,否则
,否则
 ,那么
A
是具有支集
,那么
A
是具有支集
 的模糊单态。
的模糊单态。
定义3.13
(非单值模糊器) 令
A
是时空模糊集合,
ξ
∈
是精确值,且
 是空间位置。非单值模糊器针对任意空间位置
是空间位置。非单值模糊器针对任意空间位置
 ,将
中的
ξ
映射到
A
,如果对于
,将
中的
ξ
映射到
A
,如果对于
 ,
ξ
=
ξ
′
,有
,
ξ
=
ξ
′
,有
 且
且
 随着
ξ
远离
ξ
′
从1减小,对于
随着
ξ
远离
ξ
′
从1减小,对于
 ,那么
A
是具有支集
,那么
A
是具有支集
 的模糊单态。
的模糊单态。
令
 为
s
个精确输入变量,其中
为
s
个精确输入变量,其中
 ∈
X
是空间位置且
∈
X
是空间位置且
 表示空间输入变量。对于任意
j
∈{1,2,···,
s
},精确空间输入变量
表示空间输入变量。对于任意
j
∈{1,2,···,
s
},精确空间输入变量
 的模糊化都可表述为连续型时空模糊输入:
的模糊化都可表述为连续型时空模糊输入:

s 个精确输入变量的模糊结果为

这里假设模糊隶属度函数
 是可分的。
是可分的。
借鉴传统模糊规则库和推理过程,Mamdani时空模糊系统规则库中第 l 条规则可表述如下。
规则
l
:如果
 属于
属于
 属于
属于
 ,
则
,
则

式中,
 ,
j
∈{1,2,···,
s
}是空间依赖的前件变量;
,
j
∈{1,2,···,
s
}是空间依赖的前件变量;
 和
B
l
,
l
∈{1,2,···,
r
}分别是前件和后件的时空模糊集合,且
r
是模糊规则数;
和
B
l
,
l
∈{1,2,···,
r
}分别是前件和后件的时空模糊集合,且
r
是模糊规则数;
 是空间依赖的模糊系统输出。
是空间依赖的模糊系统输出。
Mamdani时空模糊系统的推理机是将时空模糊输入包含的信息经过必要推理转化为时空模糊输出。推理过程是将时空模糊集合经过并、交和补运算处理。考虑由式(3.4.2)刻画的模糊规则,该规则给出了模糊关系

根据上述模糊关系和时空模糊输入即可获得一个时空模糊集合输出。
经过模糊推理,所得输出为时空模糊集合。为获得相应的精确输出,时空模糊集合还要经过去模糊化处理。类似传统去模糊化处理,去模糊化方法有很多,没有标准的去模糊化过程。这里给出重心去模糊化方法。重心去模糊化是将时空模糊集合
B
的模糊隶属度函数覆盖区域的中心
 作为精确输出,即
作为精确输出,即

式中,
 是传统积分运算。考虑到模糊集合
B
通常是
r
个模糊集合的并或交,式(3.4.3)可近似为
是传统积分运算。考虑到模糊集合
B
通常是
r
个模糊集合的并或交,式(3.4.3)可近似为

式中,
 是第
l
个模糊集合的中心;
是第
l
个模糊集合的中心;
 是第
l
个模糊集合的高度。此类去模糊化器又称中心平均去模糊化器。
是第
l
个模糊集合的高度。此类去模糊化器又称中心平均去模糊化器。
注3.3
如果Mamdani时空模糊系统输出不包含空间信息情形,那么空间信息集成模块主要包括空间积分或空间取极大值运算,精确输出
 经过空间积分或空间极大值运算等空间信息集成处理即可获得有限维输出。当然,也可以先进行空间信息集成,再进行去模糊化,如图3.4.3所示。两种方案,孰优孰略,有待于进一步研究。
经过空间积分或空间极大值运算等空间信息集成处理即可获得有限维输出。当然,也可以先进行空间信息集成,再进行去模糊化,如图3.4.3所示。两种方案,孰优孰略,有待于进一步研究。

图3.4.3 Mamdani时空模糊系统:有限维输出2