
下载掌阅APP,畅读海量书库
立即打开



无损卡尔曼滤波(Unscented Kalman Filter, UKF)以无损变换(Unscented Transform, UT)为核心,利用高斯分布的特点,从原始状态中取一些特定的点来获取对应的原始状态高斯分布特性,传递更准确的均值和协方差。当目标对象的非线性程度提高到一定水平的时候,UKF将拥有更高的精度,且不需要对系统线性化,运算过程中不需要计算系统的雅克布矩阵,可以提高估算的效率和稳定性。非线性系统的状态方程如下:

观测方程:

UKF流程如下:
(1)初始化
(2)时间更新部分
1)生成2 n 个sigma采样点,采样点来源于原始状态附近,进行适当的运算得到。
2)将各个采样点代入状态方程,可以得到:

3)计算得到 k 时刻的均值:

4)计算得到 k 时刻的协方差:

(3)观测更新部分
1)根据预测值,重新生成一批采样点。
2)将各采样点代入观测方程,可以得到:

3)计算得到 k 时刻的均值:

4)计算得到 k 时刻的协方差:

5)估计状态和观测之间的协方差:

6)最终利用卡尔曼增益更新状态量:
结合UKF的流程,设计一个质心侧偏角 β 和横摆角速度 ω 的状态估算器。估算状态量质心侧偏角 β 和横摆角速度 ω ,写成向量的形式:

观测变量横向加速度 A y 、横摆角速度 ω ,写成向量的形式:

外界输入的影响变量方向盘转角 δ ,写成向量的形式:

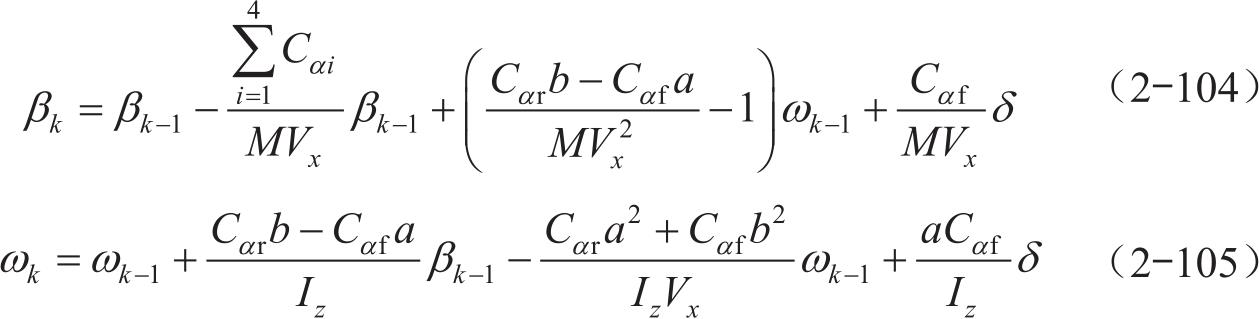
状态方程如下:
观测方程如下:
