
下载掌阅APP,畅读海量书库
立即打开



美国作为医疗水平相对发达的国家,在远程医学领域研究较早,在进入远程手术正式研究之前已经进行了远程会诊、远程视频医疗教育等基础研究。20世纪90年代以后,外科手术相关的远程医疗发展迅速,大批量报道相继出现。Becker在1992年发表了第一个关于远程手术实时远程会诊的报道,在手术过程中应用标准电话专线网络进行病理切片的传输,并由远程病理学专家给予实时病理诊断,但基于当时网络及医疗水平,在35例病例中仅有37%的诊断帮助率。同年,Satava首次使用SRI International远程操作系统直接控制机械针尖的运动来完成部分操作,这是远程手术机器人的开始,也是手术从现场到远程操作的转折点,他们也基于此操作系统开发了目前著名的达芬奇(da Vinci)机器人。
在1994年美国马里兰州开展了泌尿外科远程手术指导,在手术室所在医院建立远程站点,医师端与患者端相距约1 600km,手术中所有组件连接到手术室中信号源,手术系统中添加一个开关以控制组织切割及止血,在这种初始远程手术设备下完成32次简单手术操作,但远程手术发展中的关键问题即两站点之间手术关键数据的传输问题,并未得到解决。针对该关键问题,Kavoussi及其团队在1996年尝试性进行了7例远程手术的基础操作,应用区域网网络线路,以1.5Mb/s的带宽在5.6km以外的站点完成手术中切割、止血等操作,并进行手术中音频、视频、操作指令及必要数据的传输(图1-1),这项研究中确定了远程手术的几个关键特征及对高质量音频、视频传导的要求。
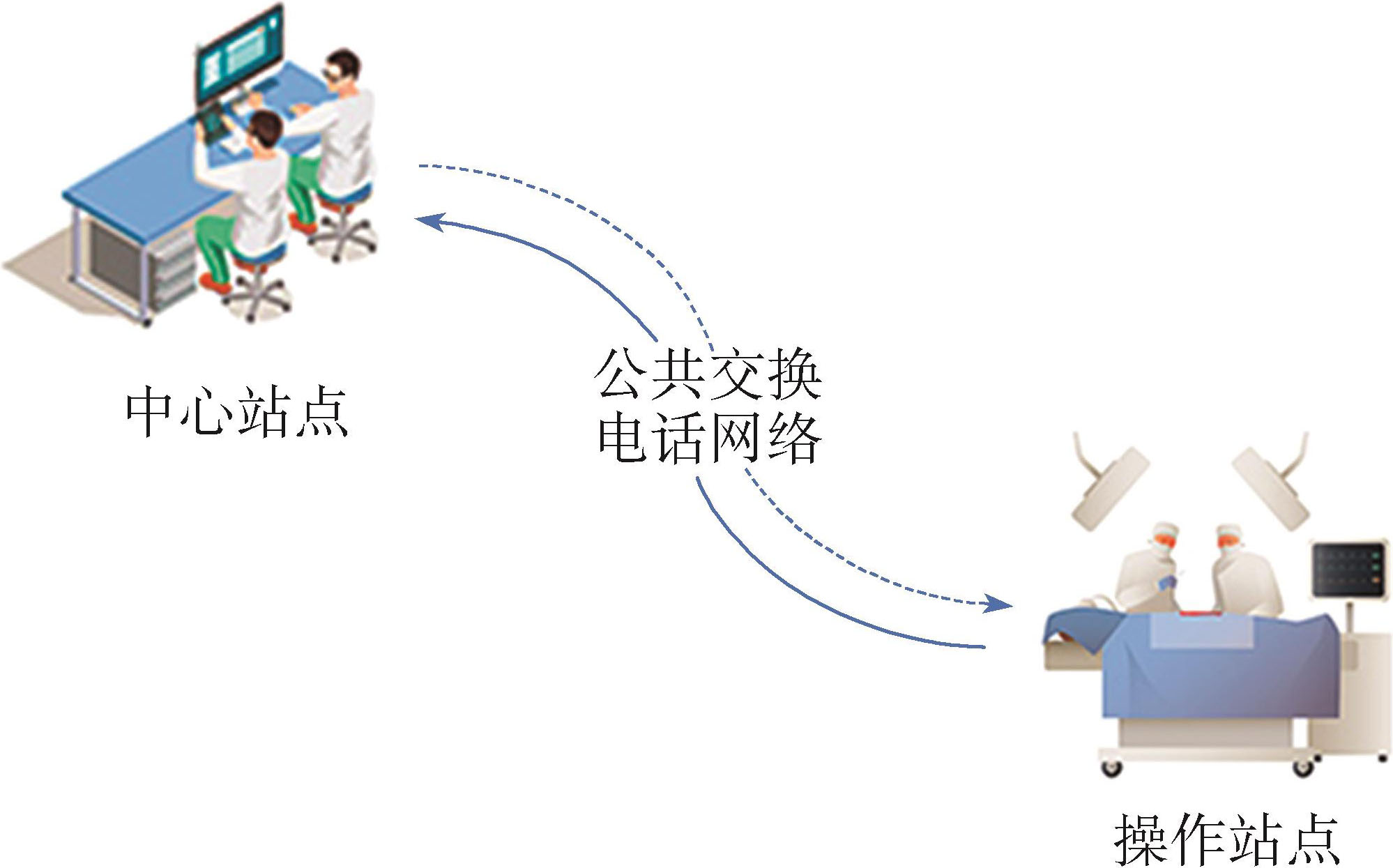
图1-1 应用远程视频指导现场端医师手术
在上述研究的经验下,约翰·霍普金斯医院在1998年尝试进行跨洲际距离的远程腹腔镜机器人指导手术,分别指导位于8 000km、14 000km及17 000km外的年轻医师完成不同泌尿外科手术,通过综合业务数字网络进行数据传输,网络延迟约为1s,带宽约为384Kb/s,尽管这项研究存在如地理位置、网络等条件的限制,但在远程指导下手术均顺利完成。随后,该团队应用相同网络技术,在位于8 000km以外的意大利进行了经皮肾穿刺操作,应用一种专门研发的机器人系统,在10min内完成肾脏穿刺。
除泌尿系统手术外,普通外科的其他手术如疝修补术、胆囊切除术等因操作相对简单均成为远程手术的研究重点。1999年,Cubano团队尝试将航空母舰战斗群与其他设施相连,计划完成5例腹腔镜疝修补术的远程指导(图1-2),当时挑战性应用国际航空站的网络通信,虽然网络延迟并未达到理想水平,但显示出国外对远程手术中组网方案潜力在不停发掘,为以后的远程手术奠定基础。2000年,Cheah等人也在当地医师的帮助下完成了自新加坡到美国巴尔的摩市的远程腹腔镜胆囊切除术。
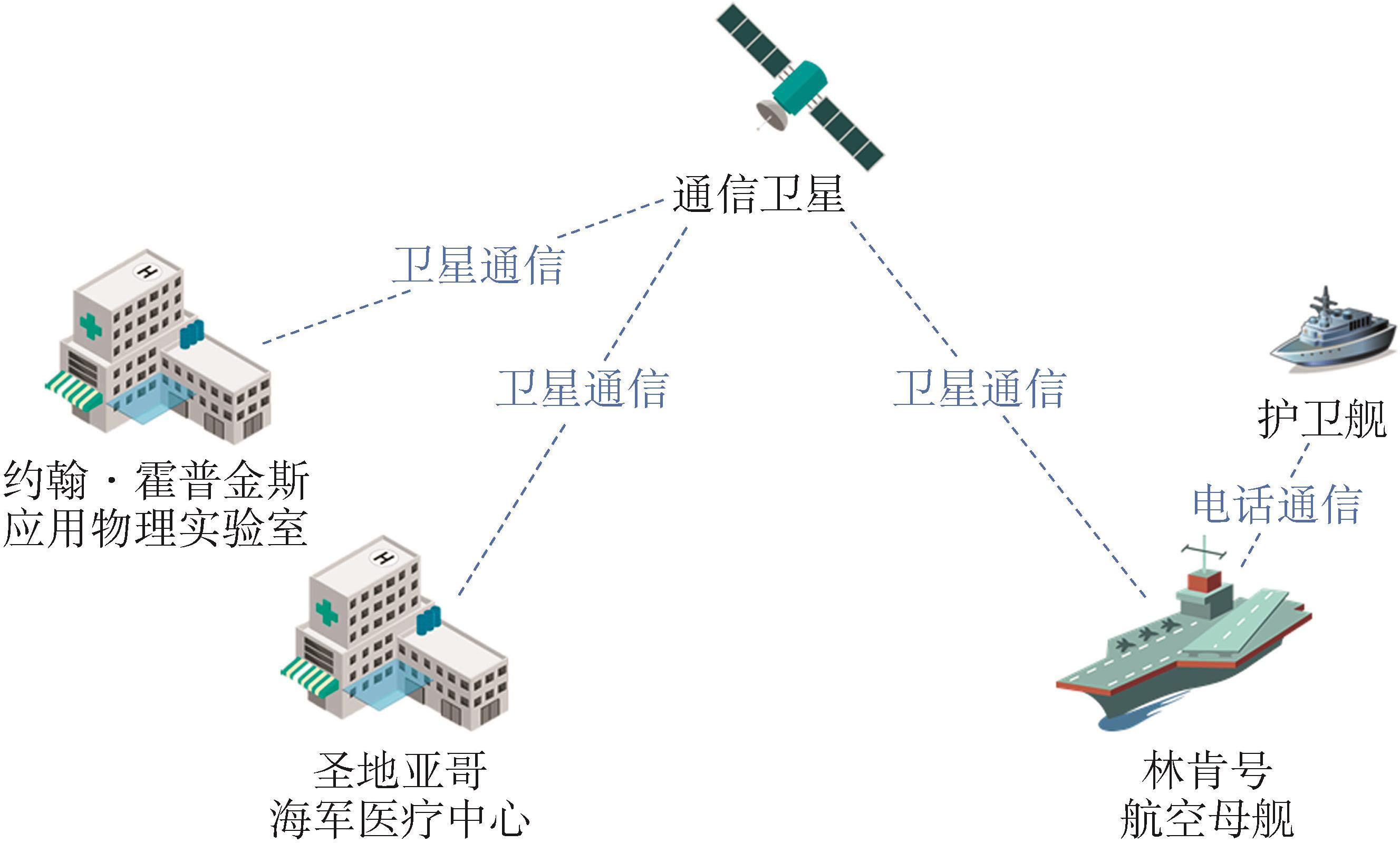
图1-2 应用国际航空站的网络通信将航空母舰战斗群与其他设施相连完成远程指导手术
至此,在20世纪90年代远程手术不断发展的基础上,国外部分国家已掌握了远程手术中的关键技术,由最初的远程简单操作到远程手术系统基本成型,并开始不断尝试真正意义上独立的远程手术。直至2001年,第一台真正的远程外科手术成功完成,即著名的“Charles Lindbergh手术”(图1-3)。接受手术的是一名68岁的女性胆囊结石患者,位于法国斯特拉斯堡,而外科医师位于距离7 000km以外的美国纽约。手术中应用了一种特殊的专线网络进行信号传递,手术中数据传输稳定,操作信号及影像信号传输流畅,并将手术操作维持在较低的网络时延水平。这是远程手术的一个里程碑,它验证了远程手术技术的可行性。
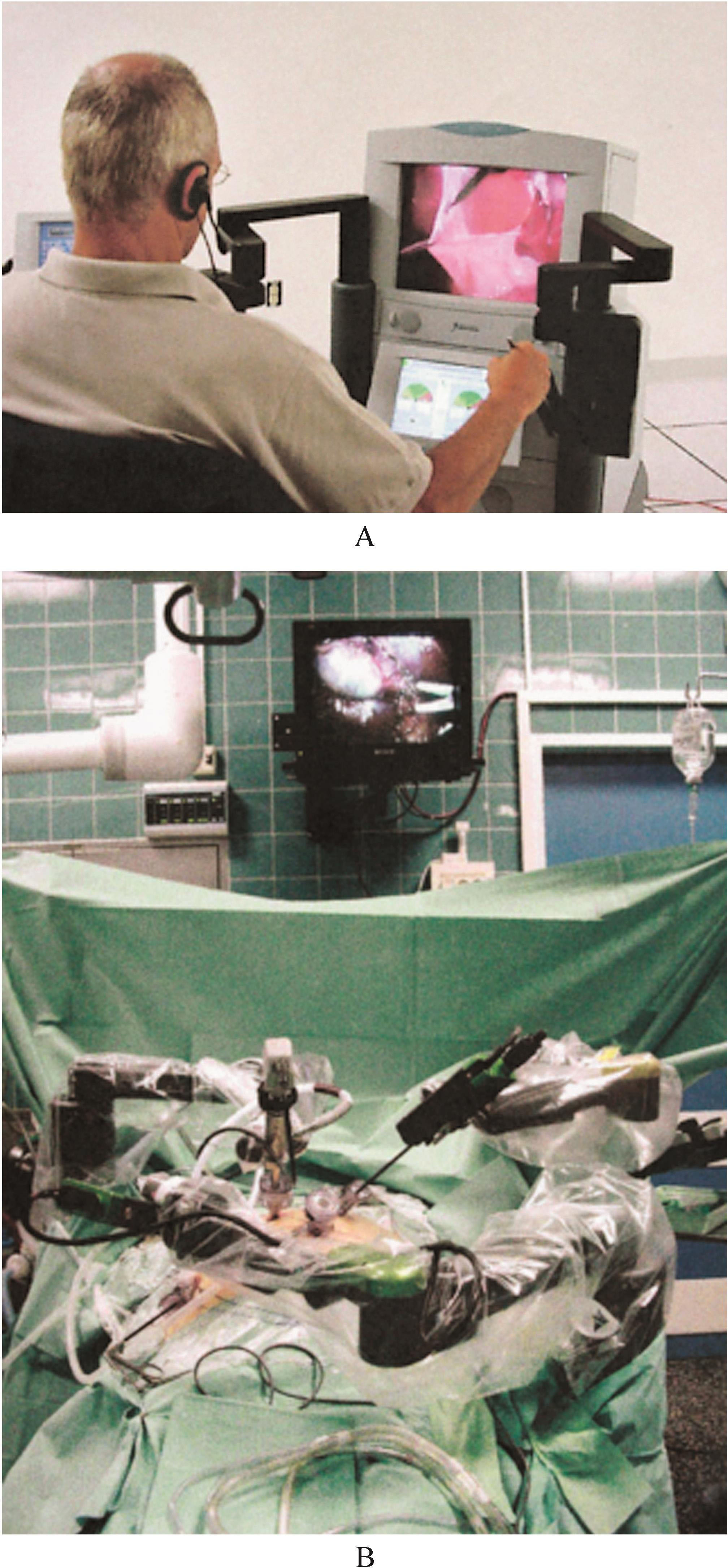
图1-3 真正意义上的第一台远程手术:“Charles Lindbergh手术”
A.手术端;B.患者端。
中国作为医疗资源分布不均的代表,高水平外科医师及先进的医疗设备基本分布在大、中城市,农村及偏远地区则明显落后,存在着明显的地域性差别,众多需要手术的患者无法在当地得到高质量、及时的手术治疗,因此远程手术在我国更有发展的必要。相比于欧美等发达国家,我国远程手术研究尽管起步落后,但发展速度惊人,已迅速进入适合我国国情的发展模式。
在21世纪初期,海军总医院利用远程手术机器人系统为脑肿瘤患者行立体定位活检手术,完成了我国首次脑外科异地手术;北京积水潭医院应用主从式机器人手术系统进行远程骨科辅助手术操作。尽管两项手术顺利完成,但研究中远程手术系统仅起到辅助定位、影像传输作用,无法实现手术医师灵活无间断的实时手术操作,且术中影像信号及操作指令的传输无严格要求,对网络时延等必要条件无法严格把控。随后,我国也开始对远程手术中网络方案及机器人系统等关键因素进行深入研究,使远程手术能够安全、稳定地完成。2012年12月,北京航空航天大学联合海军总医院成功完成我国首次远程海上手术,手术过程通过卫星链接网络将位于海军总医院远程中心的医师端及位于太平洋海域的患者端建立通讯联系,应用BH-7机器人系统完成了脑外科立体定位手术。然而,卫星通信信号不确定的网络延迟、较高的数据丢包率等成为该研究的主要问题,该网络方案远远不能满足远程手术要求。
4G网络通信的应用推动了我国远程手术的发展,其网络稳定性优于卫星通信。2015年,国产“妙手S”手术机器人借助10Mb/s带宽商用网络,完成了间隔约170km的远程无线动物实验,实验中应用当时热门的4G网络,平均手术延时在250ms左右,系统双向总延时最大为302.6ms,丢包率约为4%。虽然整个实验较为成功,但4G网络的窄带宽及高时延仍限制了远程手术的临床应用推广。4G网络方案是目前5G无线网络的起源,它借助双侧网关通过4G通信方式接入互联网。当多个用户发生业务关系时,信息流通过互联网到达对方设备。由于数据流要经过4G和公网两个瓶颈的制约,与其他用户数据流共享公网带宽,当4G信号较弱或公网资源不足时,实际可用带宽就会下降。因此,使用此种组网方式,带宽稳定性较差,会对双向视音频交互应用产生不利影响,该网络仅仅在最初被用在动物实验中,之后被其他网络迅速取代。
(赵 炜)