
下载掌阅APP,畅读海量书库
立即打开



在解剖学上,姿势需要依赖骨骼、肌肉、非收缩性结缔组织(包括肌膜、肌腱、韧带)之间的互动。在生物力学上,这3个系统组成复杂的应力结构,彼此之间产生互补的力量,使身体可以维持直立与平衡。因此,本章会涉及身体姿势在解剖学、生物力学与人体运动学上的理论知识。
这些知识可以让治疗师在工作时更有自信,根据对身体动作的了解来作判断,同时减少因运动不当而造成伤害的可能性。从事运动治疗的专业人员,必须善于描述各种影响运动表现的因素,而这也是给予适当、负责任治疗的先决条件。

在治疗过程中,仅通过书本或解剖图谱与模型,并不能充分认识动作系统解剖学的知识。解剖学知识的学习,须通过系统化的努力与广泛的经验、观察、聆听、发问,当然还有实际的演练,将这些知识内化并加以运用的主要方法。
解剖学可分为系统解剖学(系统化且精确地描述身体的解剖结构)和局部解剖学(涉及身体的构造,讨论特定区域内各器官之间的关系)。本章从系统解剖学与局部解剖学的实用层面来阐述,并讨论与人体姿势相关的人体运动学,详细说明各身体关节之间的功能性连接。除此之外,本章会谈到神经系统在维持身体姿势时的功能。
纵观实用解剖学与人体运动学两个层面,希望能让读者轻松地整合与姿势相关的资料,以便今后可以进一步地研读,并在理论与实际之间相互对照。
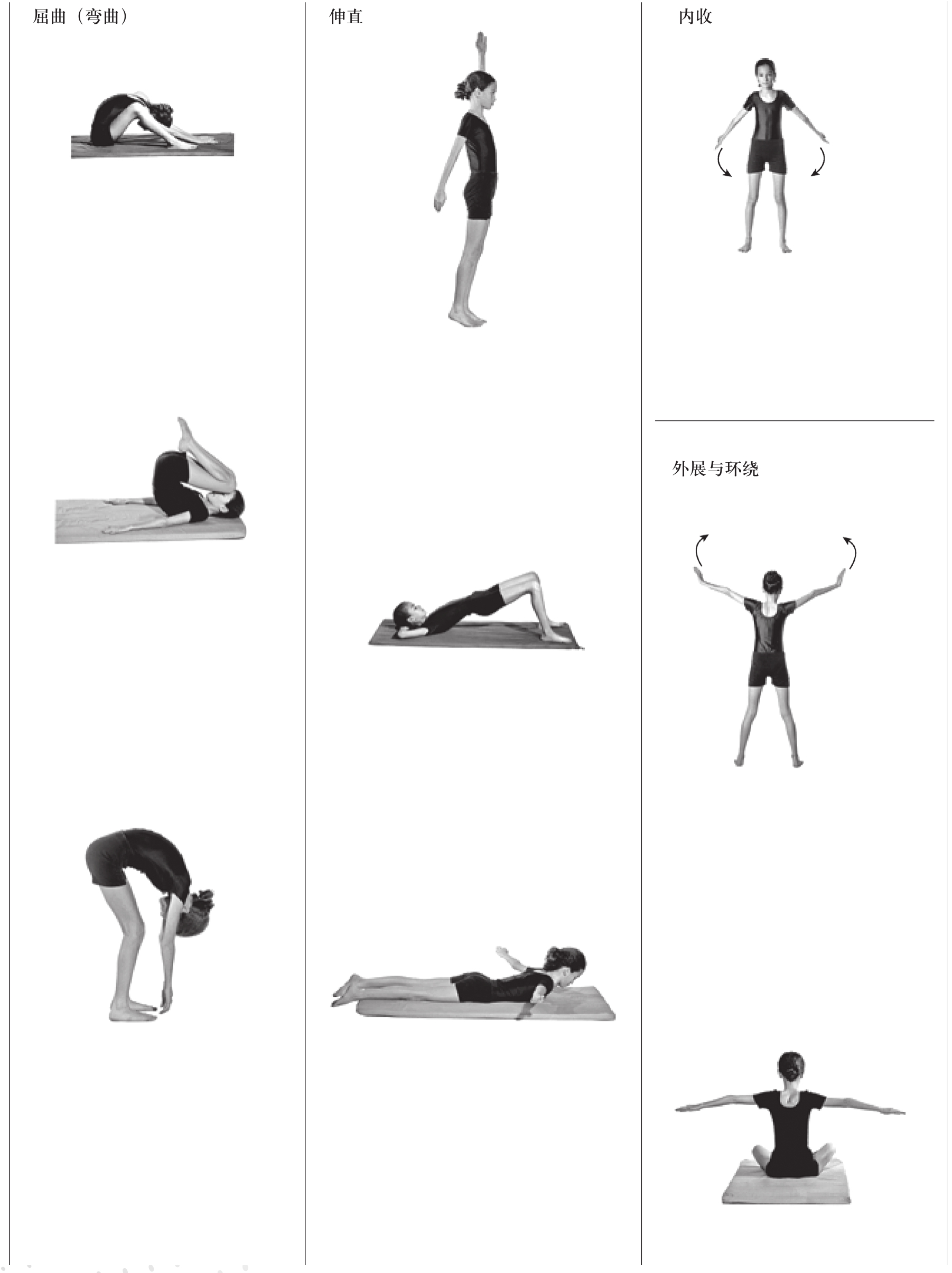

肩胛骨内收

肩胛骨外展
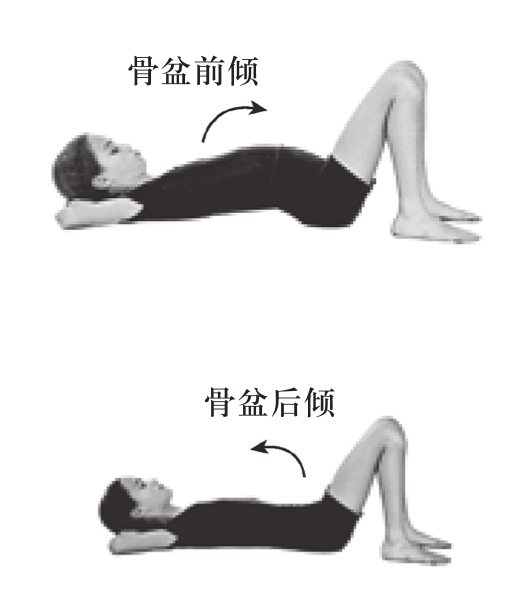
骨盆前倾/骨盆后倾(图2.1)
以髂前上棘(anterior superior iliac spine,ASIS)位置为参考点的动作。骨盆后倾(posterior pelvic tilt,PPT)是减少腰椎前凸使腰椎变得平坦,并将髋关节向前移。骨盆前倾(anterior pelvic tilt,APT)则是增加腰椎前凸(图2.1)
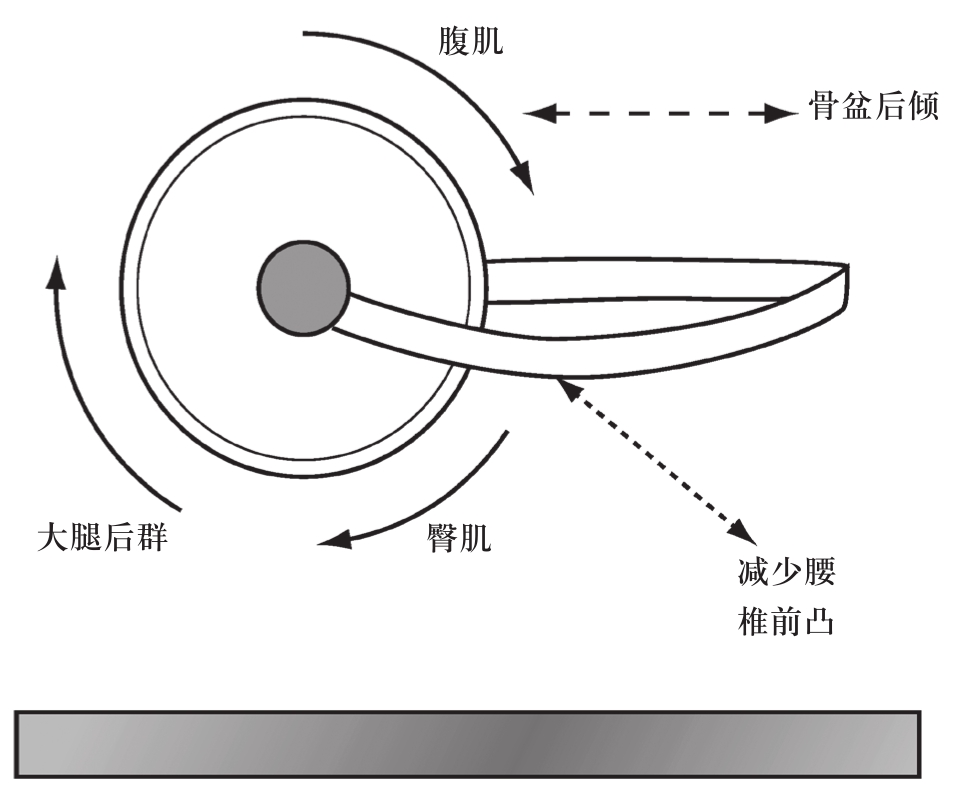
图2.1 骨盆前倾与骨盆后倾的机制
身体动作分别在下面3个平面来表现:

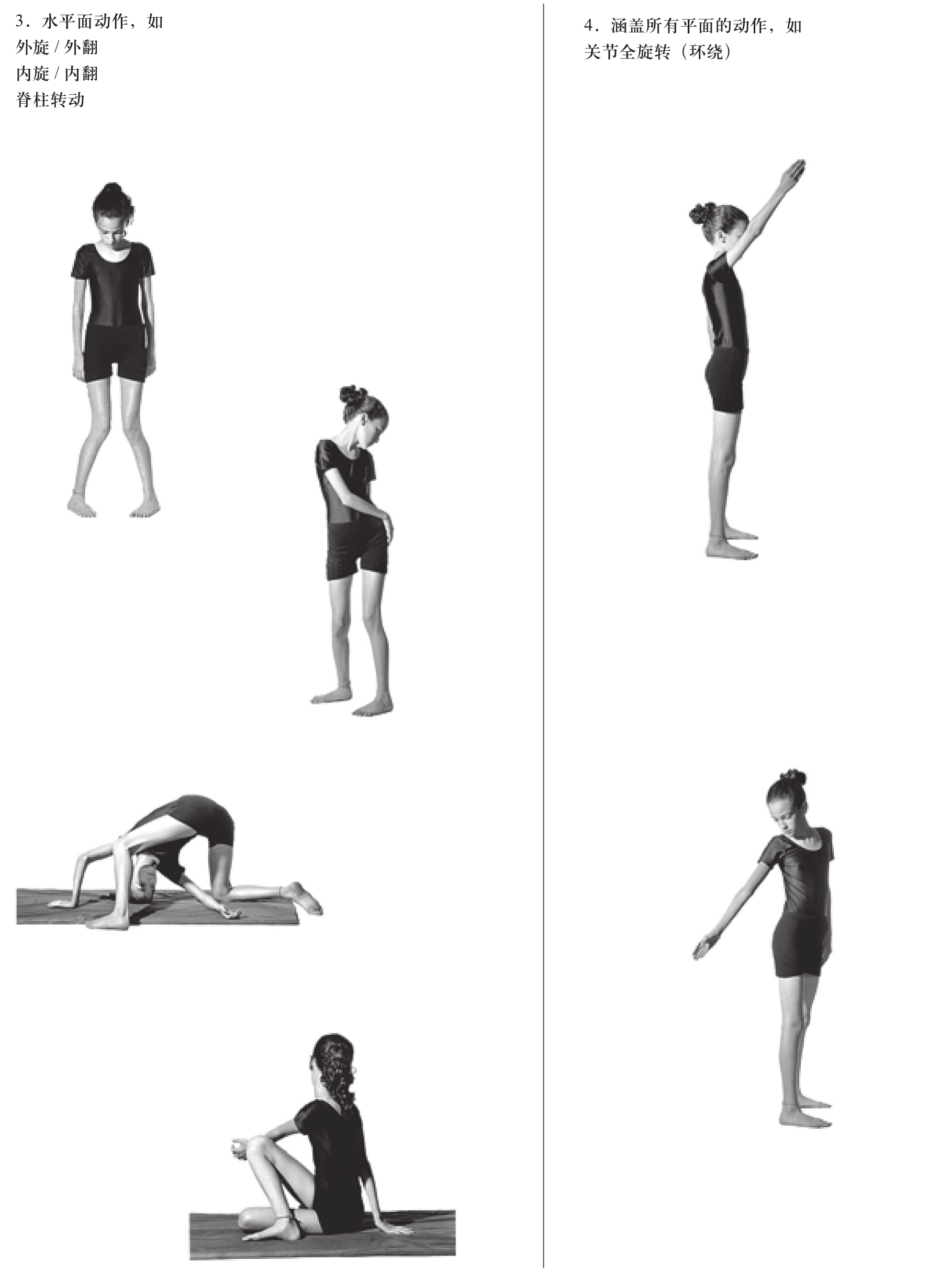
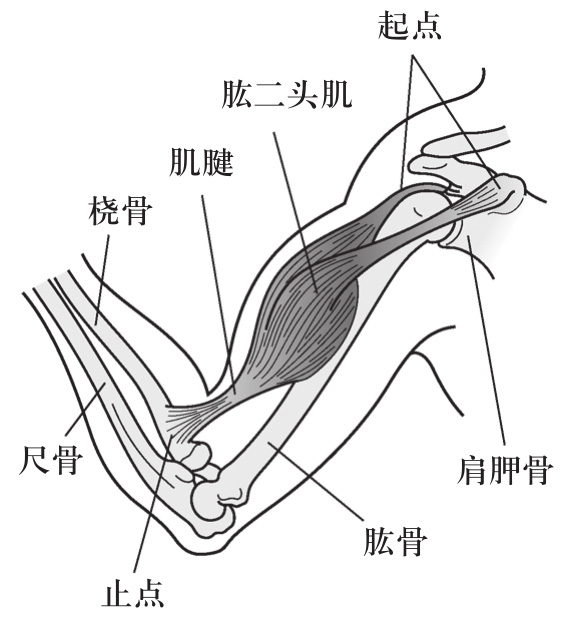
图2.2 肱二头肌的起点与止点
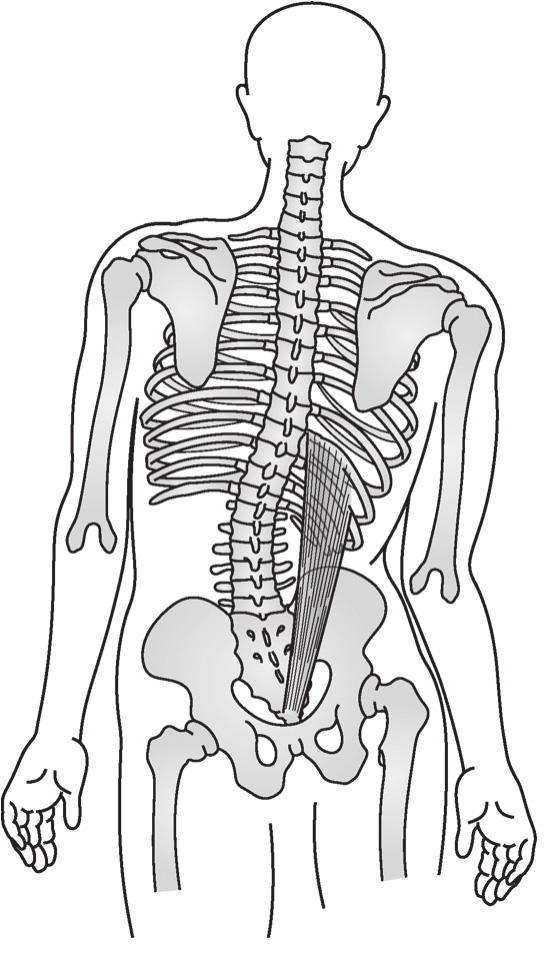
图2.3 拮抗肌群之间的不平衡造成脊柱侧凸(Nudelman & Reis,1990)。其他脊柱侧凸的成因,在第4章有详细说明。
每个正常身体的动作,必须由稳定且平衡的肌肉系统来完成,并且在动态与静态下都有最佳的表现。
身体的动作是通过肌肉细胞的收缩来完成的。我们都知道,肌肉系统不仅要移动身体,也要支撑与稳定身体。肌肉系统内随时都保持着一定程度的张力,并且在任何时刻,都会有少数的纤维在进行微小的运动。
从解剖学的观点来看,肌纤维的排列方式决定了肌肉的功能与设计。肌肉内包含许多肌肉纤维,而肌肉纤维会集合起来成为肌束。肌肉在活动时,并不会启动所有的纤维:有些纤维会处于休息状态,当肌肉出现疲劳迹象时,才会开始动作。
每个肌肉都有起点与止点(图2.2)。在日常活动中,起点维持不动,而止点会移动。肌肉的主要止点在骨骼上,它的位置不一定呈直线排列,也有呈斜线走向的(如腹斜肌),这样的排列方式能促使肌肉以较少的收缩量达到快速的动作,并节省收缩时消耗的能量(Baharav,1972)。本章会详述肌肉系统以及其与姿势相关的功能:
· 执行身体许多部位的动作
· 维持关节稳定
· 协助呼吸过程(以膈肌与肋间肌为主)
肌肉在执行动作的时候,须拉动其所依附的骨骼。根据肌肉系统的排列方式,每个关节都被彼此方向相反的肌群覆盖着,即拮抗肌群。
拮抗肌群之间的平衡,是姿势保持正常的绝对关键要素。拮抗肌群之间缺乏平衡,可能会危害到骨骼的支撑状态,如下肢关节、骨盆、肩带及脊柱的负荷过多(Nudelman & Reis,1990)(图2.3)。
每一个动作都会牵涉数块肌肉,从这种合作模式来看,我们可以将肌肉的功能分成下列几种类型:
· 执行指定动作的主要肌肉,即主动肌群
· 放松而允许动作执行的拮抗肌群
· 协助主动肌群的协同肌群
· 使身体特定部位成为稳定基座以利动作执行的稳定肌群
肌肉功能也会随着身体的位置而不同。除了产生动作,肌肉也可以阻止产生动作,因此应该将肌肉的活动分为静态与动态,举例来说,在动态活动中,三角肌是负责使手臂侧举(外展)的主要肌肉。在手臂外展后,它也是维持手臂高举的重要肌肉(图2.4)。
因此,肌肉主要有3种运动方式:
1.收缩抵抗重力或其他外部力量(向心收缩)来执行动作。
2.因重力的作用产生延长(离心收缩)来进行动作。
3. 防止动作产生-静止状态下抵抗重力。在静态动作中,肌肉可根据活动性质与身体位置以正常、缩短、延伸的长度来发挥功能。
尽管肌肉系统有静止功能,但其最基本的作用仍然是产生动作。而身体的任何静止状态,只是这个基本活动的一部分而已。许多研究学者(Kendal & McCreary,1983;Kisner & Coby,1985;Chukuka等,1986)认为,姿势肌群是在帮助身体直立。但我们必须知道,在最佳的生理学状态下,维持平衡站姿仅需要极少的肌肉能量。如果出现大量肌肉活动,则表示姿势出现异常,请注意其中的关键之处:有些人认为是姿势肌群让身体可以在站立时保持静止不动,但实际上,这个静止状态所需要的肌肉活动却非常少。
Basmajian(1978)注意到这个关键点并提出异议,他认为如果只有当身体直立且各方向的力量取得平衡时,才能称作正常姿势,这样的定义是非常狭隘且受限的(图2.5)。因为这只涵盖了维持身体站姿对抗地心引力的能力,以及平衡身体重心和上下各肢体的能力。然而,更广泛的定义应该考虑到其他的情况,如坐、躺卧,甚至行走等人们在日常活动中会用到的姿势。
本章根据专业解剖书籍中一般通用的专有名词,列出了肌肉以及相关联的骨骼系统的英文或拉丁文名称,详见表2.1~表2.7。
我们会从以下的观点切入,讨论各个关节:
· 从解剖学观点,概述各关节与骨骼的结构性构造
· 概述会影响到关节位置与功能的主要肌肉
· 从人体运动学观点,概述维持姿势所需的关节活动度
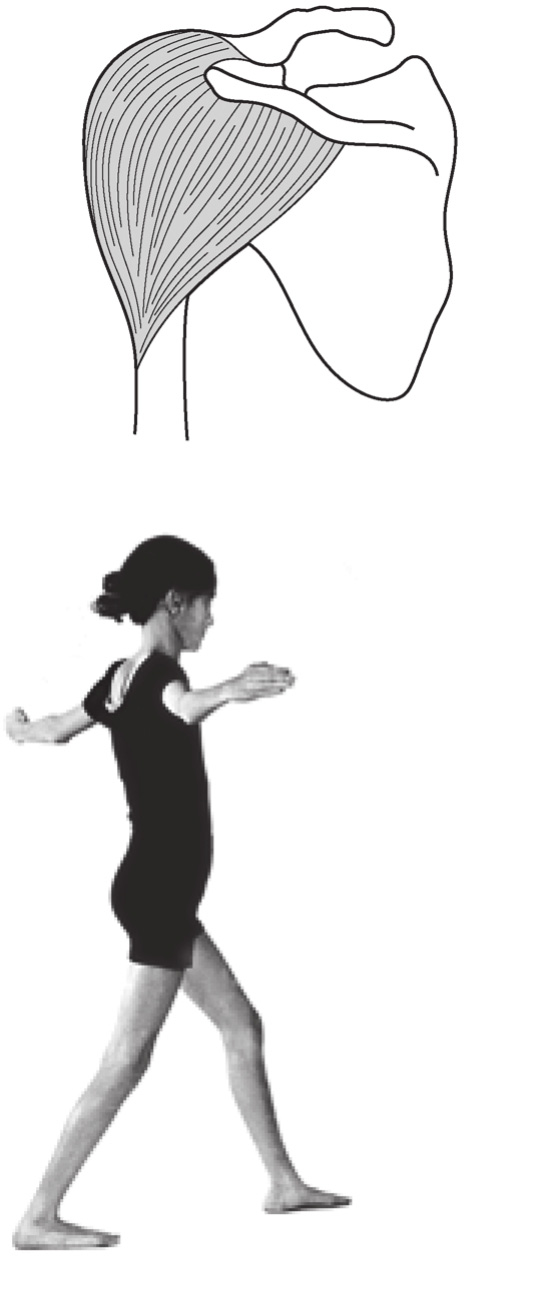
图2.4 三角肌及其动作
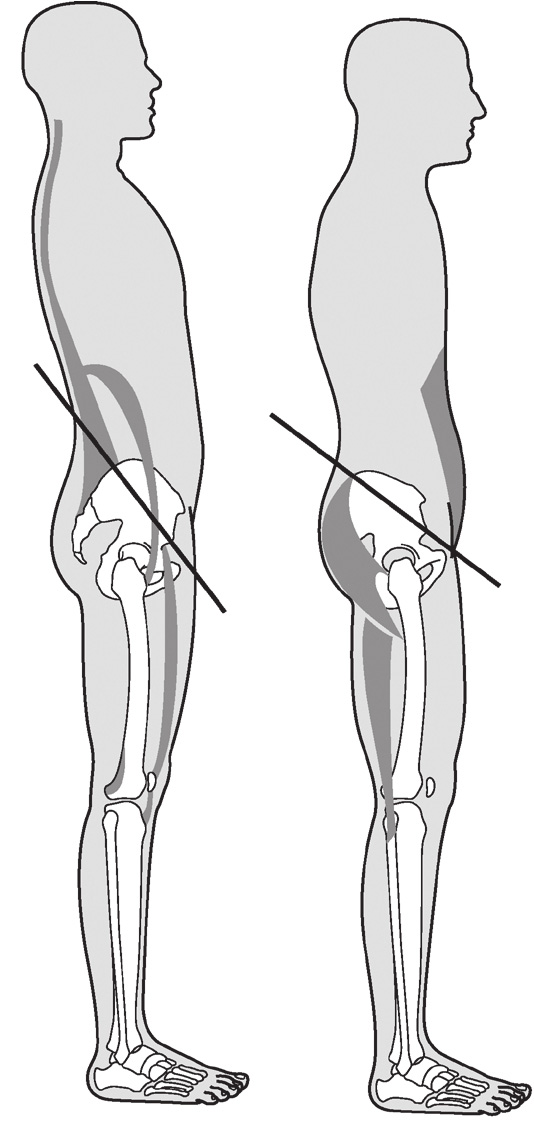
图2.5 静止站立时的姿势肌群
足部的结构特点以及有许多骨骼之间彼此相连的关节,让足部可以直接承受身体的重量,拥有最佳的稳定度与活动度。如果足部结构正常,肌肉系统只须消耗最少的力量,便能支撑住身体重量。足部同时也扮演避震器的角色,所以它必须要在走路、跑步、跳跃等行走位移的动态功能中,适应各种情况。即使脚下所踩的不是水平面(如沙地、草地、坡面),足部仍然必须依情况进行调整,使在其上方的结构与关节有稳固的底座。
足部骨骼可以分成3类(图2.6):
1.7块跗骨。
2.5块跖骨。
3.14块趾骨。
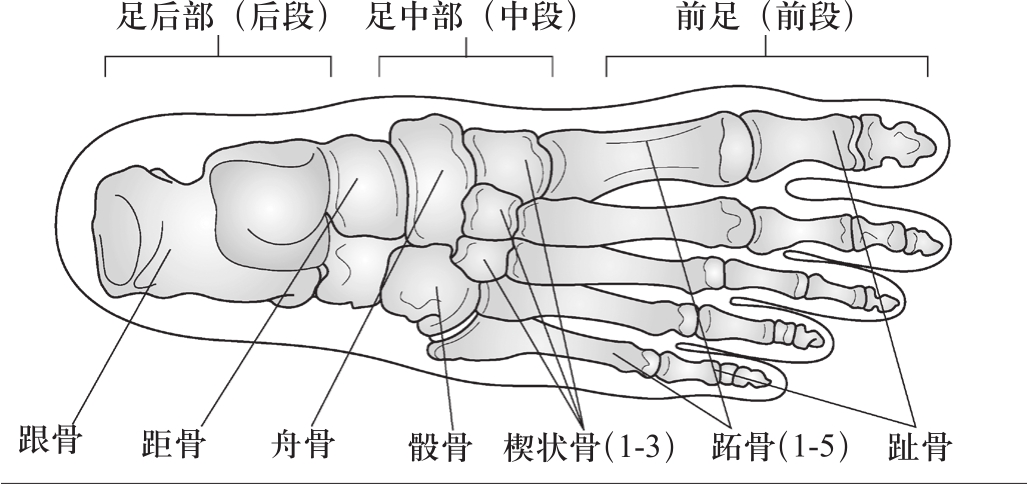
图2.6 足部骨骼
从结构上来看,足部必须承受许多重量,且承受的重量通常比体重更多。为了承受重量,足部有两个足弓(图2.7):
· 纵向足弓
· 横向足弓
正常的足弓弧度对姿势非常重要,因为正常的足弓可以让足部具有力量、稳定度、柔韧性以及弹性。足弓过低或过高都是异常的现象,可能会对一般姿势带来不良的影响,我们会在第5章说明各种足部的异常状况。
足弓正常与否,取决于沿着费司线(Feiss line)排列的数个结构的解剖学位置(图2.8)(Norkin & Levangie,1993):
· 内踝
· 舟骨结节
· 第一跖骨头
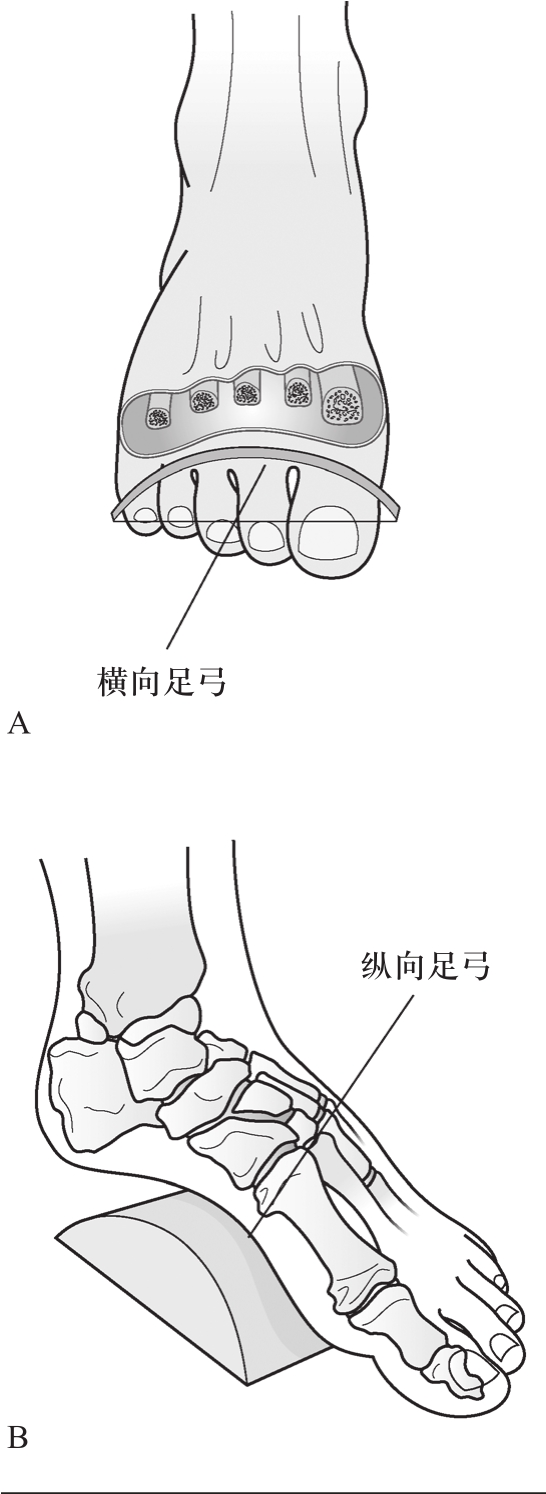
图2.7 足弓
A.横向足弓;B.纵向足弓
表2.1
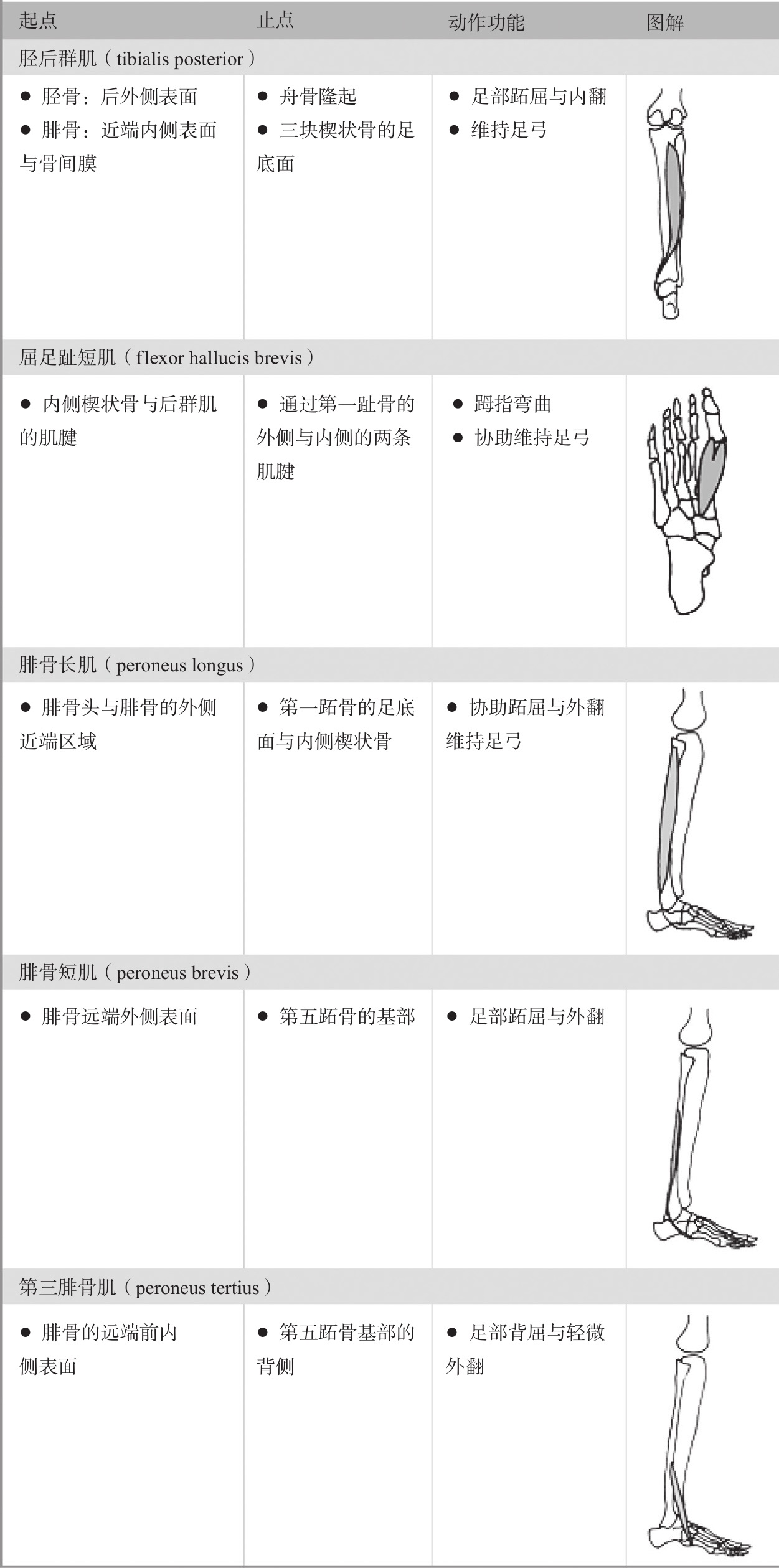
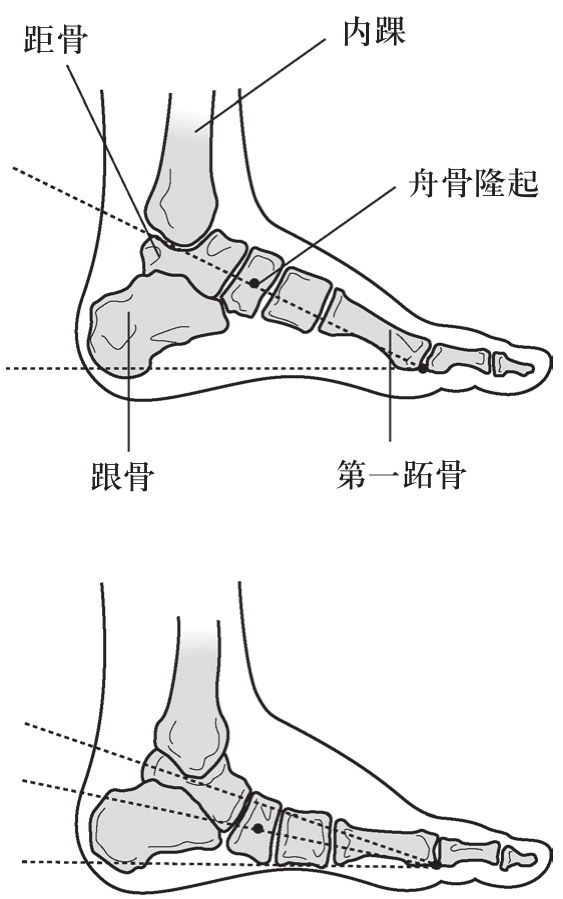
图2.8 评估足弓的费司线
踝关节位于两个腿骨(胫骨+腓骨)与距骨的连接处(图2.9),踝关节让足部可以在矢状面做背屈和跖屈的动作。一般踝关节在矢状面的活动范围为70°。足部的冠状面/额状面动作并不会出现在脚踝,但会出现在脚踝正下方称为距下关节的位置。这个关节由距骨与跟骨组成,有3个关节连接面,可让脚做内翻与外翻的动作。额状面的动作活动范围约为60°(Kahle等,1986)。
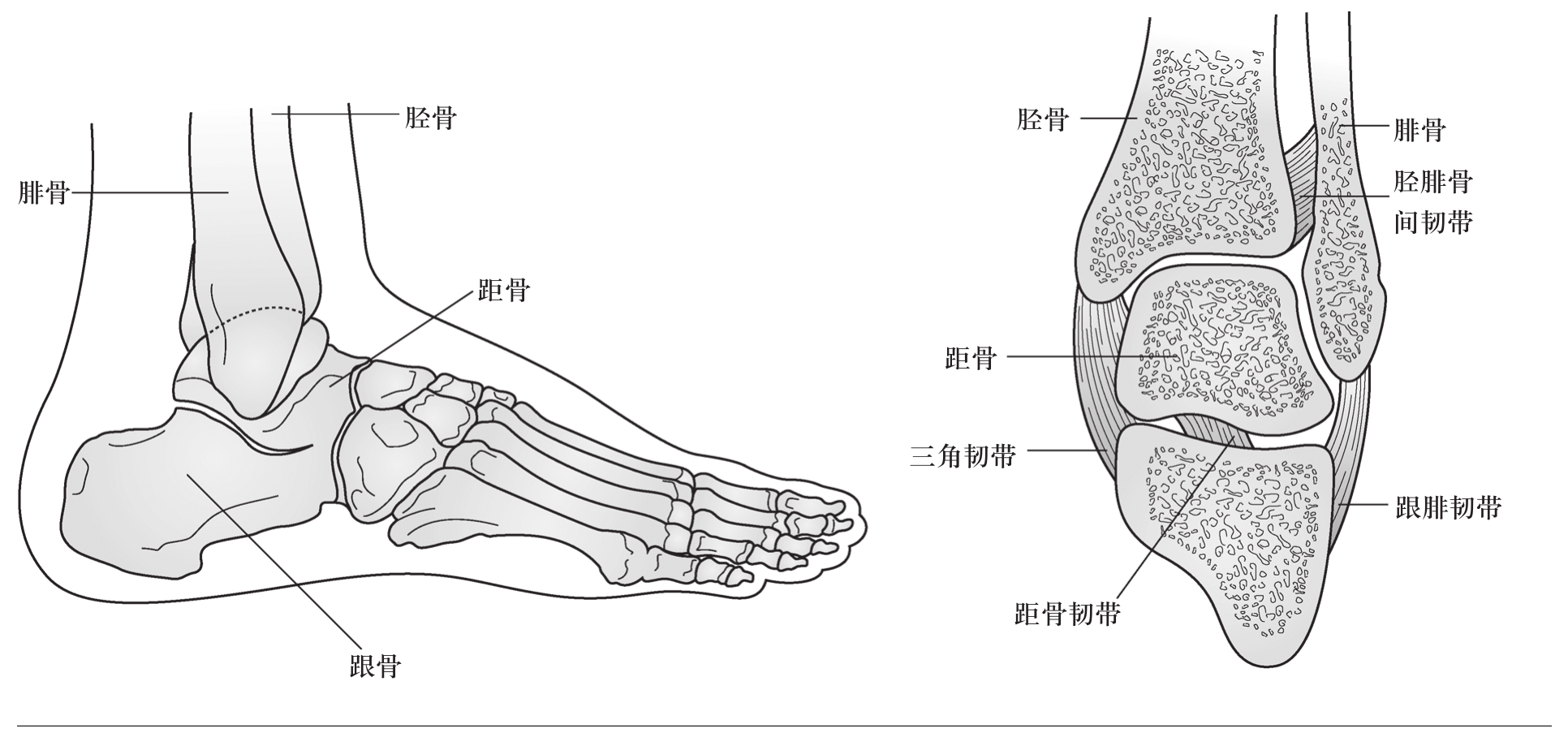
图2.9 踝关节
尽管踝关节的面积较小,却在身体姿势上以及站立、行走、跑步时将身体重量转移至足部时,扮演着重要的角色。自然地,在来自腿部肌肉张力与各方向的支撑韧带的协助下,踝关节能保持本身的稳定度。
从解剖学的角度来看,外踝的位置相对于内踝,较为远端且偏后方,这也是踝关节动作轴心不平衡且侧倾约10°的原因(Hamilton & Luttgens,2002)。
由于所有机制的每个部分和结构都会遇到各个方向的动作,因此当过度施加力量在脚踝上的时候,脚踝很容易受伤。踝关节对身体动作与方向猛烈快速的变化尤其敏感。
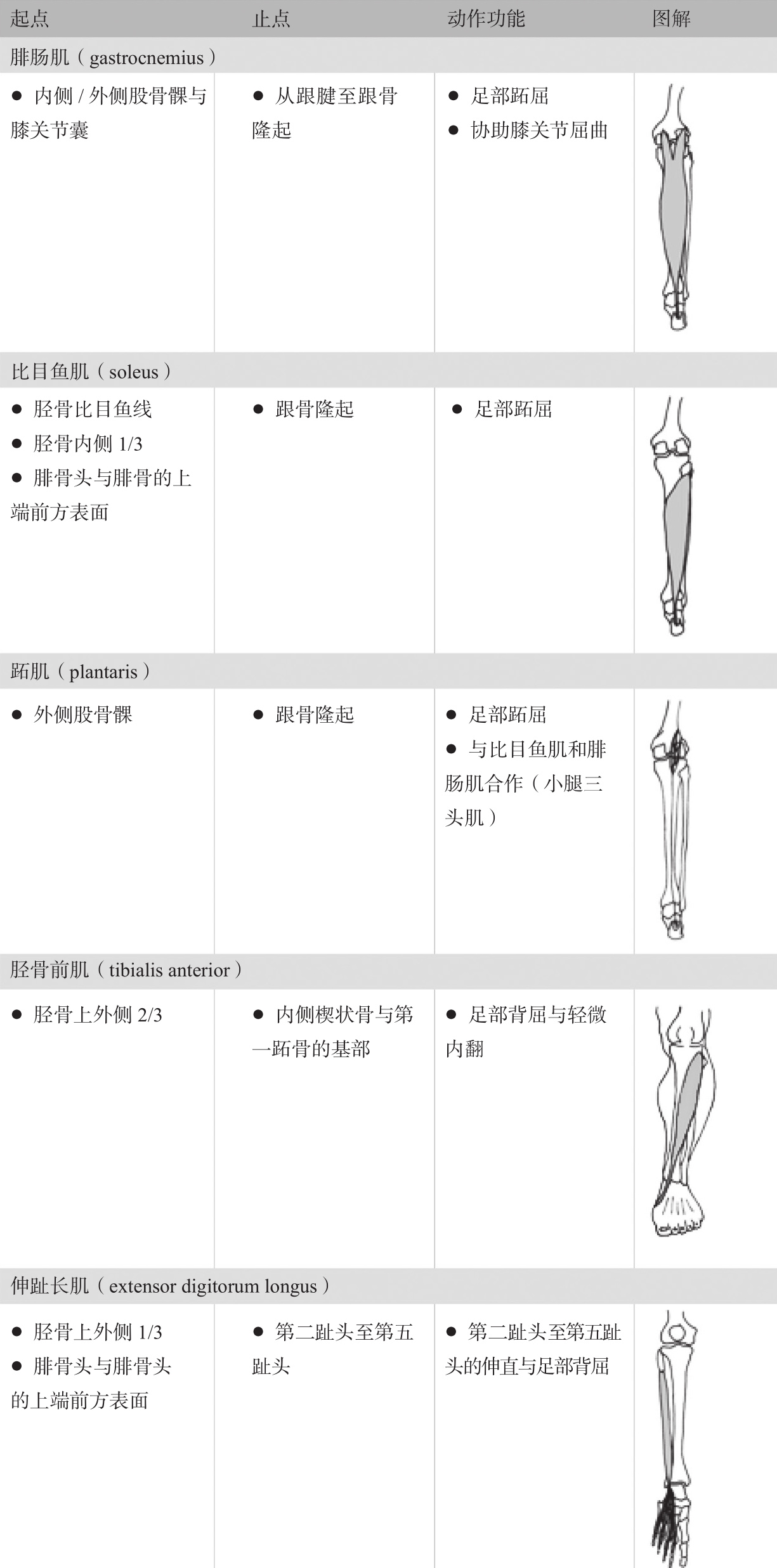
表2.2
膝关节是身体最复杂且脆弱的关节之一。膝关节位于两个长骨(股骨与胫骨)之间,利用长的动作杠杆来支撑重量,这就解释了为何有强大的力量与力矩作用在膝关节上。
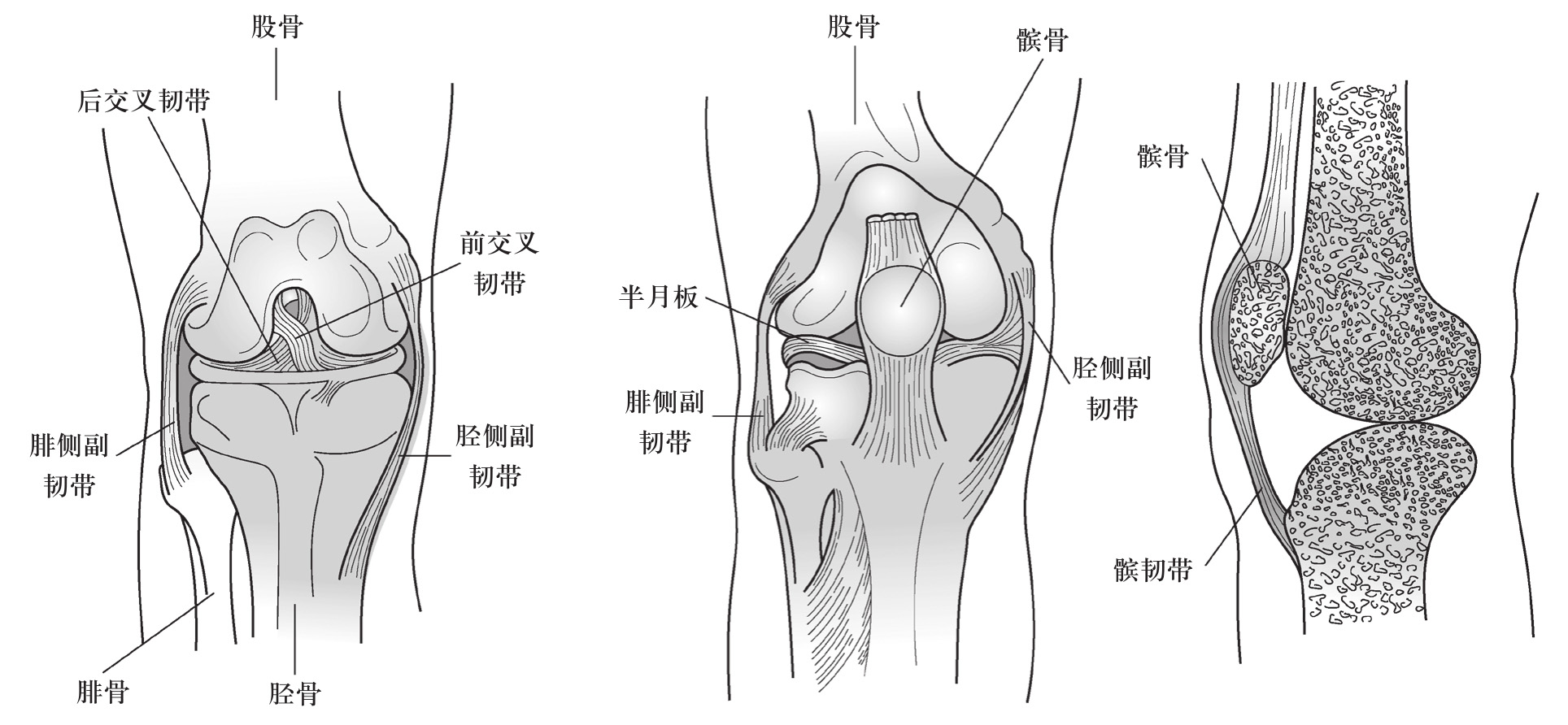
图2.10 右膝,从正面至侧面(前视图与侧视图)
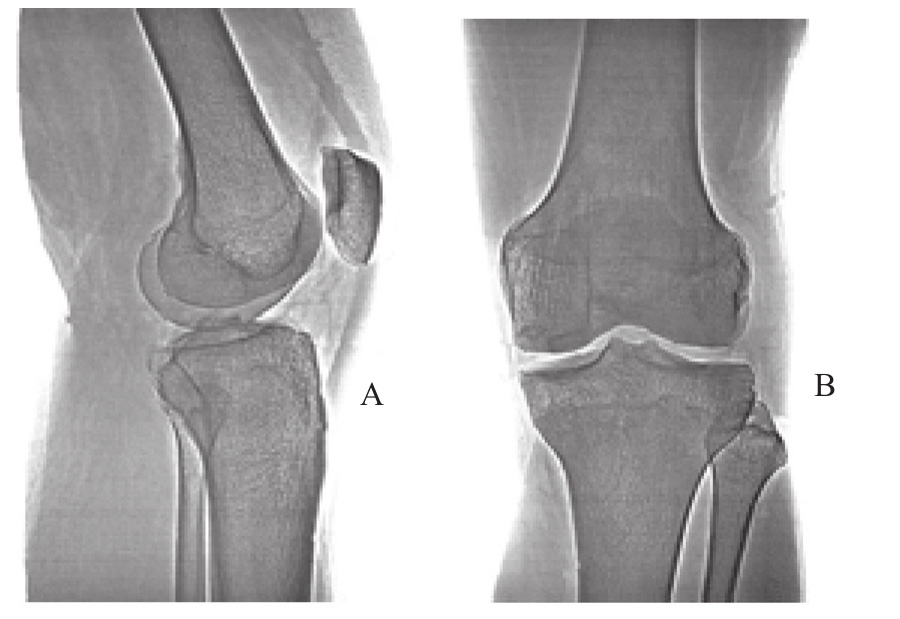
图2.11 膝关节X线片
A.侧视图;B.后视图
膝关节由3个关节连接组成(图2.10):
· 髌股关节
· 内侧胫股关节
· 外侧胫股关节
在解剖学上,当膝关节面对直接来自外侧的横向外力与旋转力时,胫骨平坦的关节表面并无法给予大腿骨的半圆部分(骨节)足够的支撑。由于此机制是如此的精细且复杂,尽管半月板增加了一些支撑,整个关节机制仍旧非常脆弱(图2.11)。
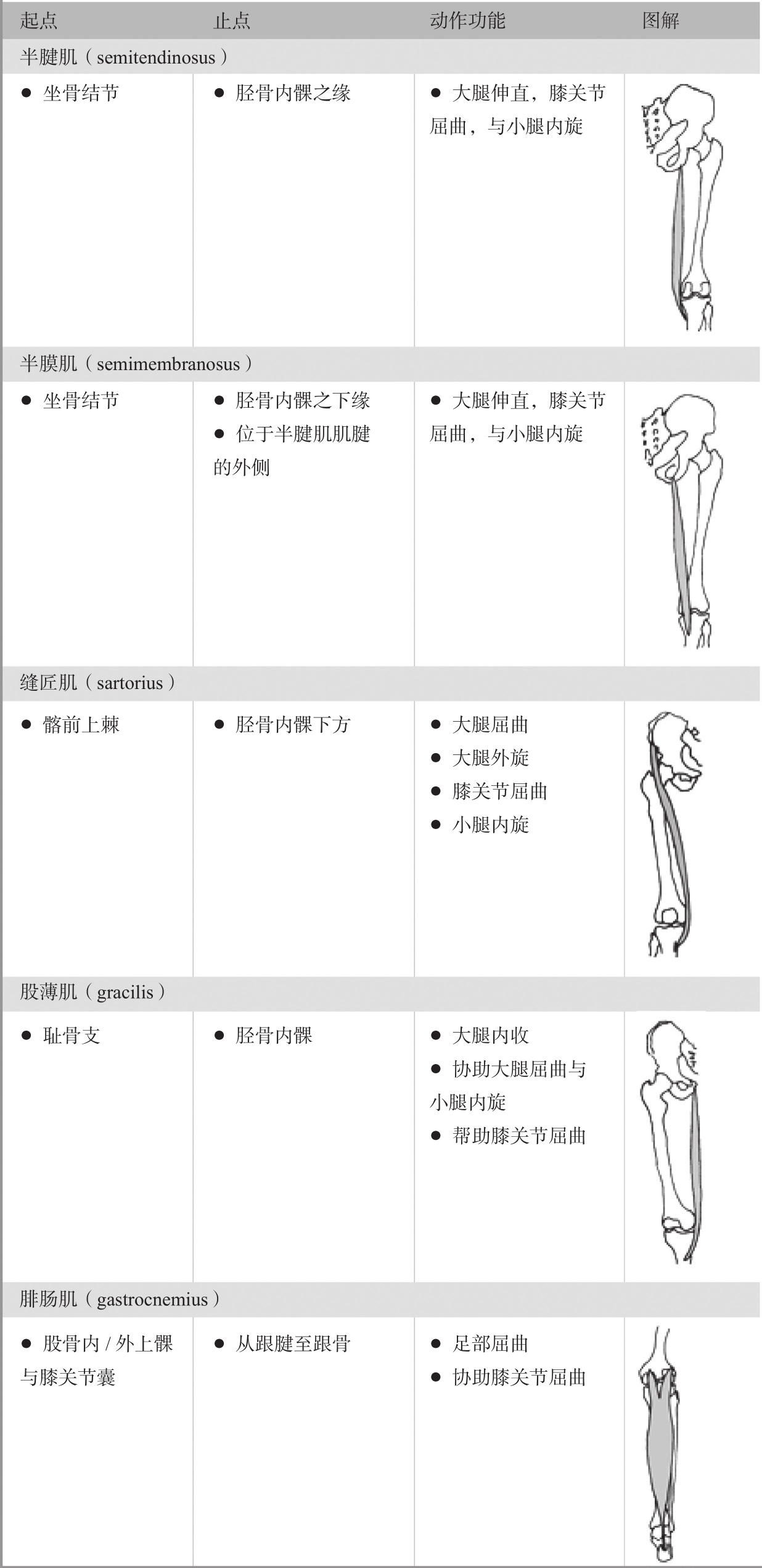
表2.3
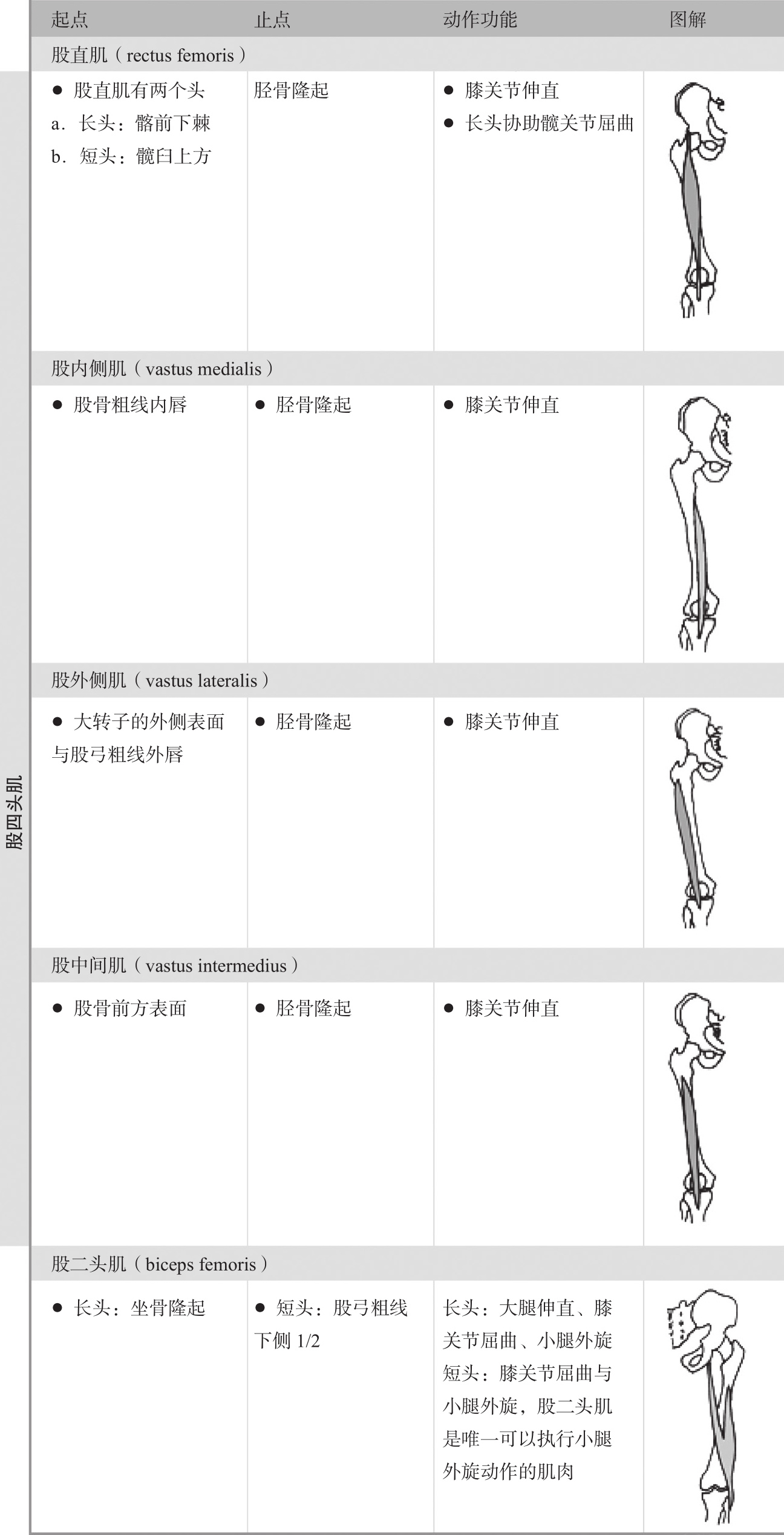
表2.3(续)
膝关节是身体中最大且最强壮的关节。在日常工作及生活中,有许多日常的活动都会用到膝关节。但是,因其结构、功能、位置的缘故,膝关节也极容易受伤。
股骨、胫骨与髌骨相连在一起,让膝关节可以屈曲与伸直,同时让胫骨相对于股骨进行转动并稍微地前后滑动(Mitrany,1993)。膝关节主要的动作均在矢状面上进行(屈曲/伸直),当膝关节屈曲时,也伴随着转动的动作(图2.12)。
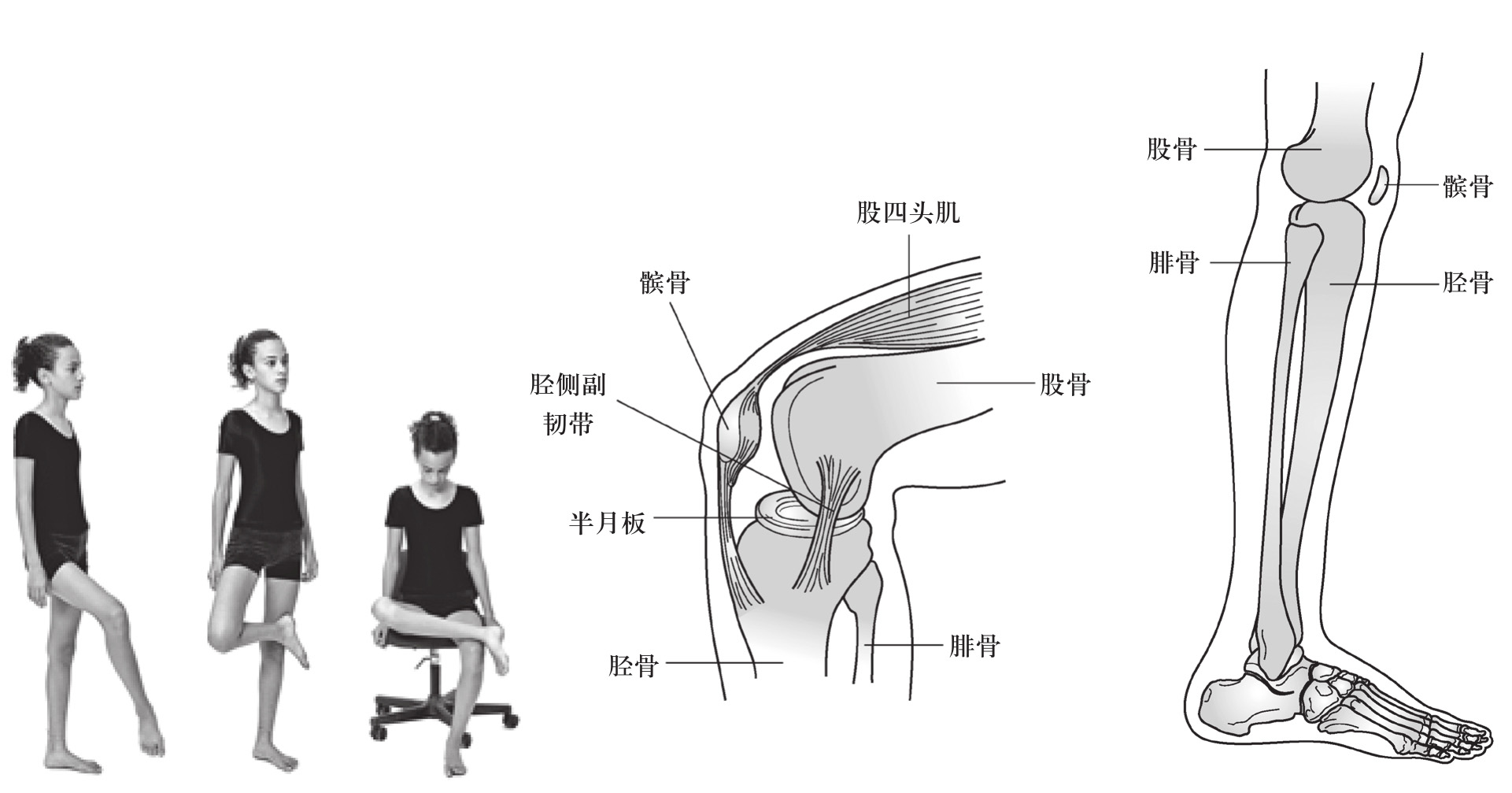
图2.12 膝关节的旋转动作
髌骨是在股四头肌肌腱中的籽骨。髌骨与股骨相连的关节面,分成外侧面与内侧面。
髌骨帮助将股四头肌的力量,从不同方向传送并引导会合至同一点上,集中各股力量,并增加杠杆力矩来帮助膝关节伸直(膝伸直机制)。因此,在生物力学上,当膝关节内产生静态与动态力量时,髌骨具有杠杆的功能(Rasch,1989)。
从人体运动学的角度来看,髌骨会在几个平面上进行动作,包括:
膝关节伸直时,相对于股骨髁,髌骨会出现上升的动作;膝关节屈曲时,髌骨会下移并挤压股骨。髌骨在矢状面除了有滑动还有转动的动作,这些动作的目的是能确保膝关节在任何角度,髌骨的任何部位与股骨均能保持接触(Kahle等,1986)。
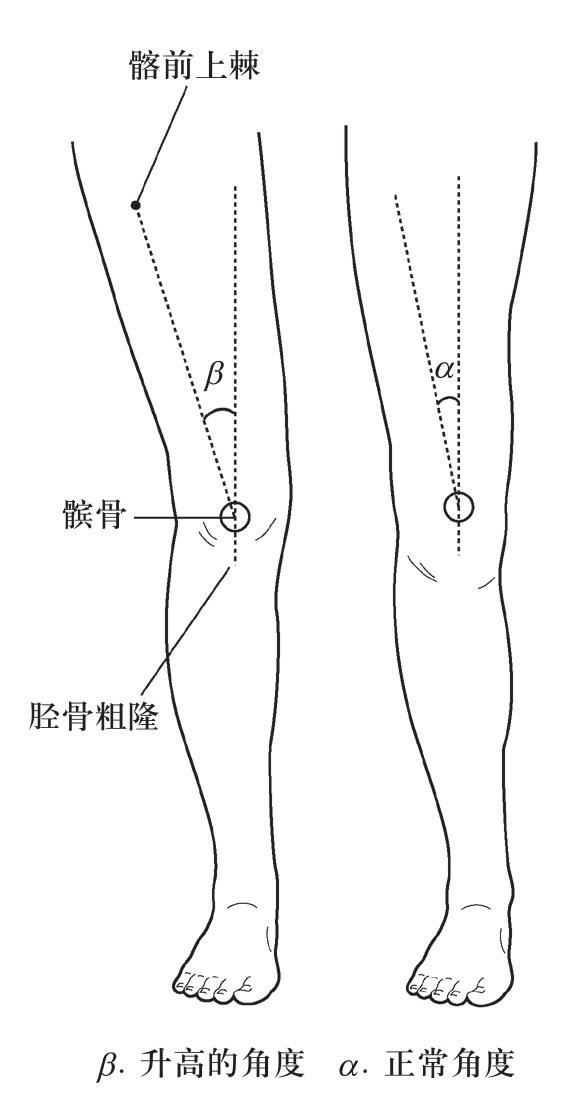
图2.13 测量 Q 角
髌骨须依赖一套结合数个支撑关节的韧带与肌腱、静态与动态的稳定系统,才能正常运动。在最佳的情况下,施加在髌骨上(主要在外侧与内侧)的各股力量可取得平衡。当此功能上的平衡被破坏时,会造成髌骨排列位置出现异常,扰乱正常的动作轨迹。这类问题的主要原因,通常是外侧力量过大以及内侧无力(Kisner & Colby,1985)。
股四头肌为膝关节的主要伸肌,许多动作产生的负荷都由股四头肌来承受,例如站立、行走、跑步、上阶梯、下阶梯。为了在这些活动中保持膝关节的平衡,股四头肌必须产生巨大的力量。
膝关节的多条韧带可以与肌肉系统共同合作,维持关节在各项运动中的稳定度。然而,膝盖的各个部位在同一时间会执行许多动作,加上在结构与解剖学上有一定的限制,因此这个关节非常容易受伤(Mitrany,1993)。在姿势方面,当股骨的动作受到控制并保持平衡,则可让两个髁突分担关节的负荷。正确地组织身体重量,并了解膝关节特有的功能,将让这些关节在许多动态情况下保持稳定。而拮抗肌群间的平衡,以及支撑韧带的正常功能,将是保证此稳定的主要因素(Enoka,1994)。
除了肌肉功能之外,髌骨位置的正常与否,也由解剖学上的结构组成而定。计算 Q 角是检査髌骨位置的方法之一。
我们可以根据两条直线来测量 Q 角(图2.13):
1.从髂前上棘到髌骨中央。
2. 从胫骨粗隆到髌骨中央。标准的 Q 角为15°,当角度大于15°时,会增加作用于髌骨的外侧力量。
· 下肢的力学轴心
· 股骨与胫骨的解剖学轴心
· 动作轴心
下肢力学轴是指从股骨头中心至距骨之间连成的一条直线,在正常情况下,这一直线会穿过膝关节的中心(图2.14)。
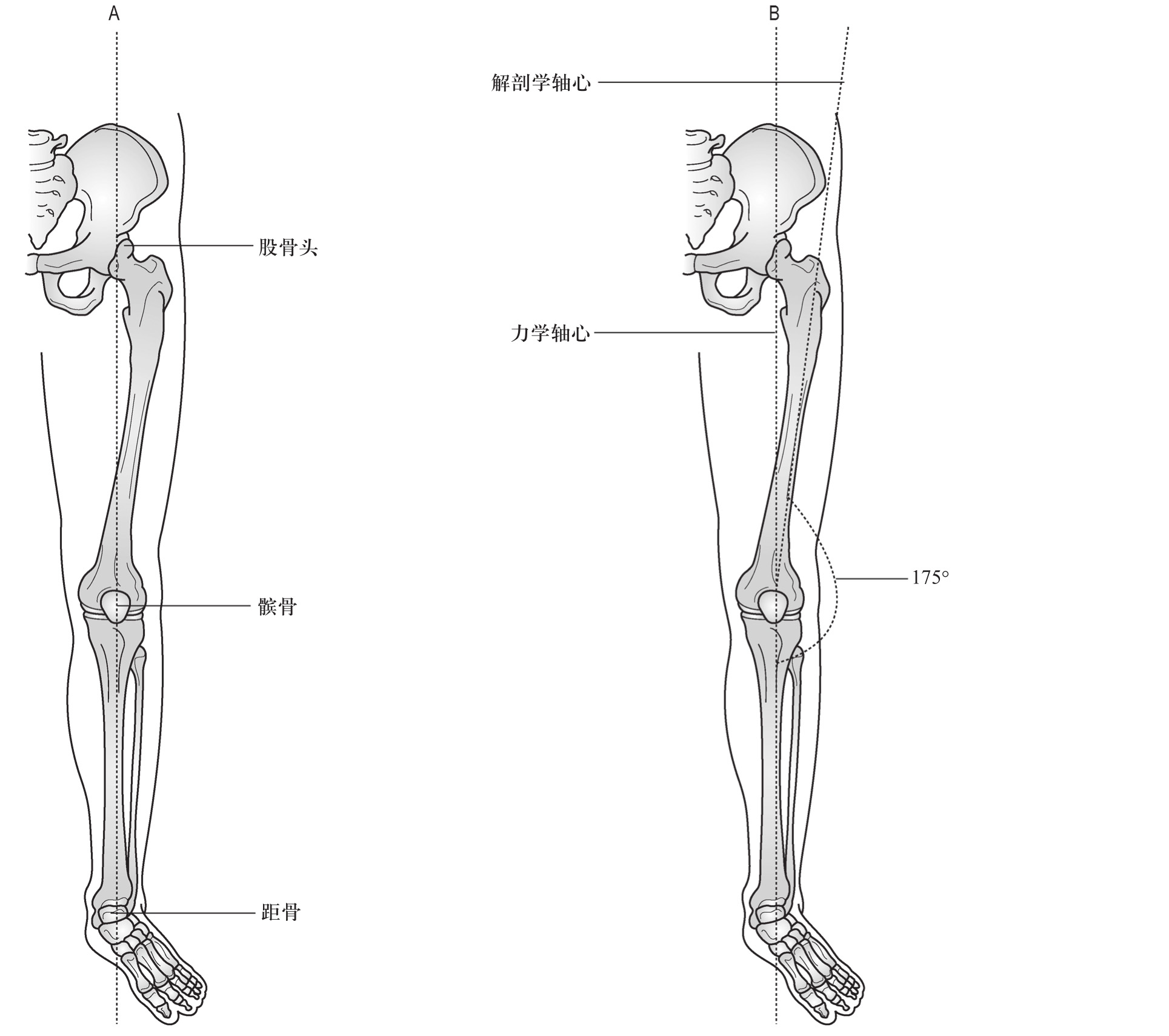
图2.14 A.下肢的力学轴心;B.下肢的解剖学轴心
解剖学轴心
解剖轴指一条穿越骨干的直线,一般来说,股骨解剖轴与胫骨会形成一个170°~175°的外侧夹角,称为胫股角。当胫股角小于165°时,会出现X型腿(膝外翻);当胫股角大于180°时,会出现O型腿(膝内翻)。
胫股角的角度落在正常范围内时(图2.14B),从地面而来的力会通过膝盖的中心,平均分摊在膝关节的内侧与外侧。角度过大或过小,会使膝关节因受力不均而出现软组织受挤压磨损或断裂的现象(Steindler,1970)。
动作轴心
膝关节屈曲与伸直的动作轴,是一条穿过股骨髁的水平线,关节的动作发生在矢状面。
内外旋动的轴心为一条穿过膝关节中心的纵向直线。在开链运动中,当膝关节维持在屈曲90°进行内外旋动时,股胫关节内侧关节面的活动度会比外侧受到更大的限制。
外旋时,胫骨的内侧平台担任这个动作的轴心。胫骨内侧平台相对于内侧股骨髁会产生少许前移的动作,而外侧的胫骨平台相对于外侧股骨髁则出现大幅后移的动作(Enoka,1994)。同样的,内旋时,也是以胫骨内侧作为动作的轴心。
膝关节转动的最大范围约70°。其中,外旋占40°,比内旋30°多一些。
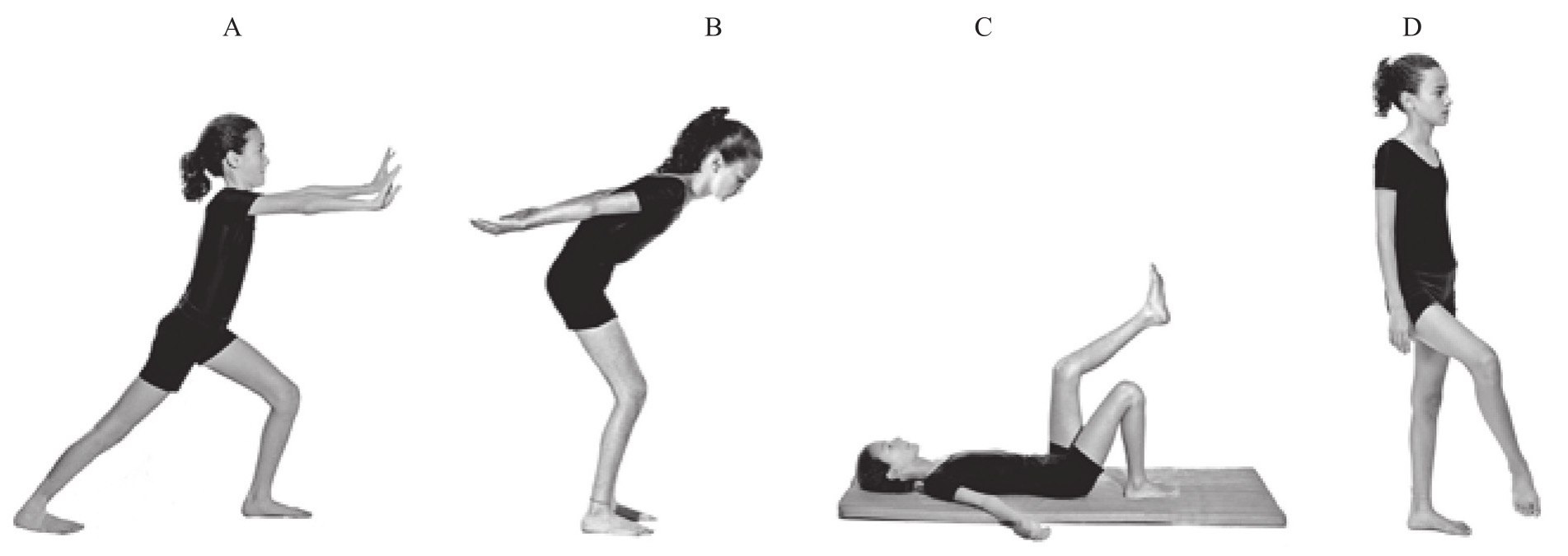
图2.15 闭链运动(A、B)与开链运动(C、D)的膝关节动作
影响膝关节活动范围的因素
在力学上,膝关节的矢状面动作(如屈曲与伸直),并不会受到骨骼结构的限制(如肘关节一般)。因此,关节囊与韧带的功能决定膝关节动作的范围。
大多数连接至膝关节的肌肉,均会横跨两个关节,即髋关节与膝关节。因此,膝关节的动作范围也会依髋关节的位置而定。举例来说,当髋关节过度伸直时,膝关节的屈曲动作将因股四头肌的股直肌被伸展而受限,因此,膝关节屈曲的范围基本在120°~140°之间,依髋关节位置而定。
在开链运动中,即腿部放松时,髋关节的位置将决定膝关节活动的范围。
在闭链运动中,膝关节动作的范围则取决于髋关节与踝关节二者的位置。任何髋关节或踝关节在功能上的限制均会造成膝关节在运动链的动作受限(Hamilton & Luttgens,2002)。
膝关节在开链/闭链运动中的功能
无论处于开链或闭链的动作状态,均会影响膝关节的动作。当双脚离开地面时,下肢是在开链运动中执行动作的。在闭链运动中,双脚则会接触地面。开链与闭链运动之间最大的差异,是足部的动作在闭链运动中会受到限制,但其他关节(膝关节与髋关节)仍可进行动作。
在闭链运动中,膝关节屈曲会伴随着髋关节屈曲与踝关节的背屈。
在开链运动中,无论髋关节与踝关节是否有动作,膝关节均可屈曲(图2.15)。在图2.15C中,膝关节屈曲伴随髋关节屈曲,但踝关节却没有任何动作。
在开链或闭链运动中,我们也必须考虑作用于膝关节的各块肌肉的功能。举例来说,在开链运动中当股四头肌收缩时,产生膝关节伸直;而同样的动作在闭链运动中,则由大腿后群肌与臀大肌参与膝关节伸直。
关节位于股骨头与骨盆髋臼的交会处(图2.16)。除了其骨性结构之外,髋关节由许多肌肉与一个网状的韧带提供稳定,这些韧带与肌肉从周围包覆髋关节,为髋关节提供各种力量与稳定度,使其能在各个平面上做各种动作(表2.4)。
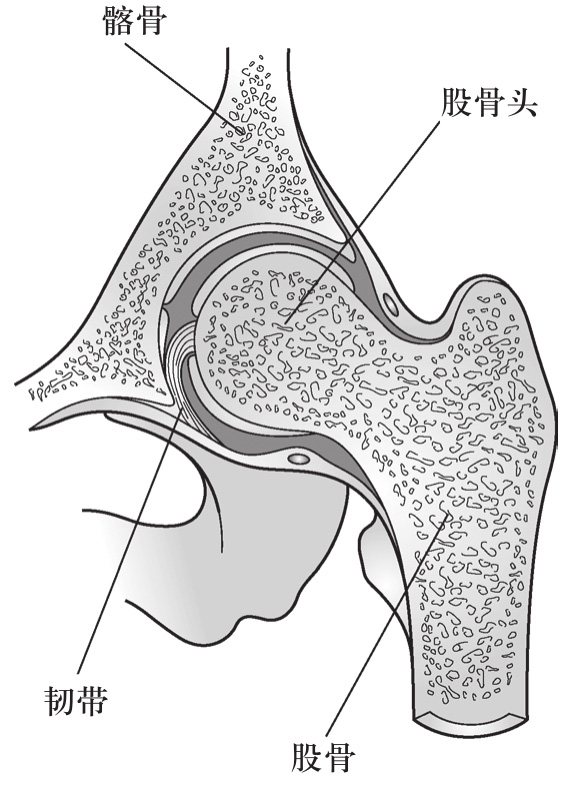
图2.16 髋关节
表2.4 影响髋关节的肌肉
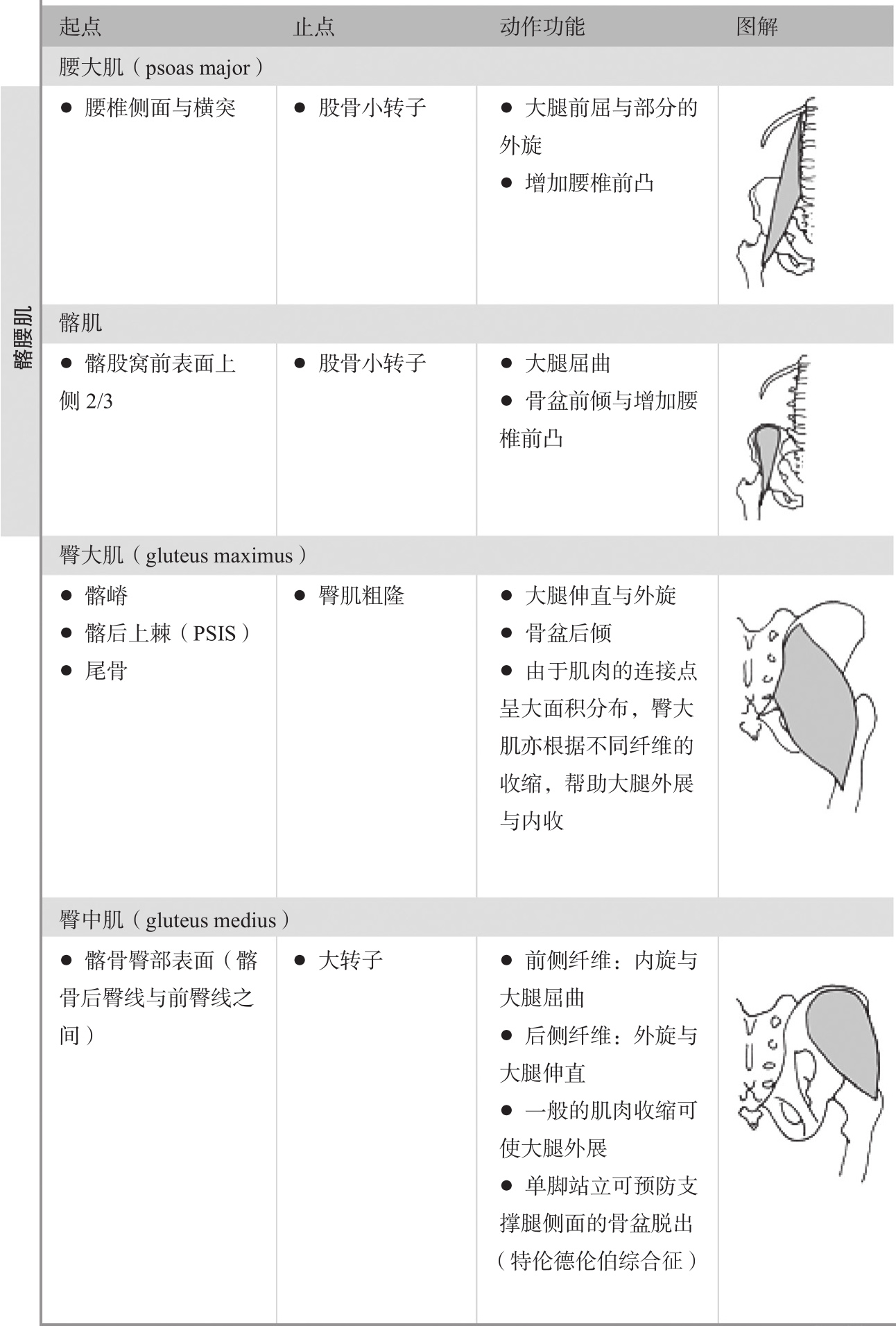
表2.4 (续)
*大部分起点位于骨盆区的肌肉均连接至股骨。
其他作用于髋关节的肌肉,将在本章稍后详述(表2.5)。
表2.4 (续)
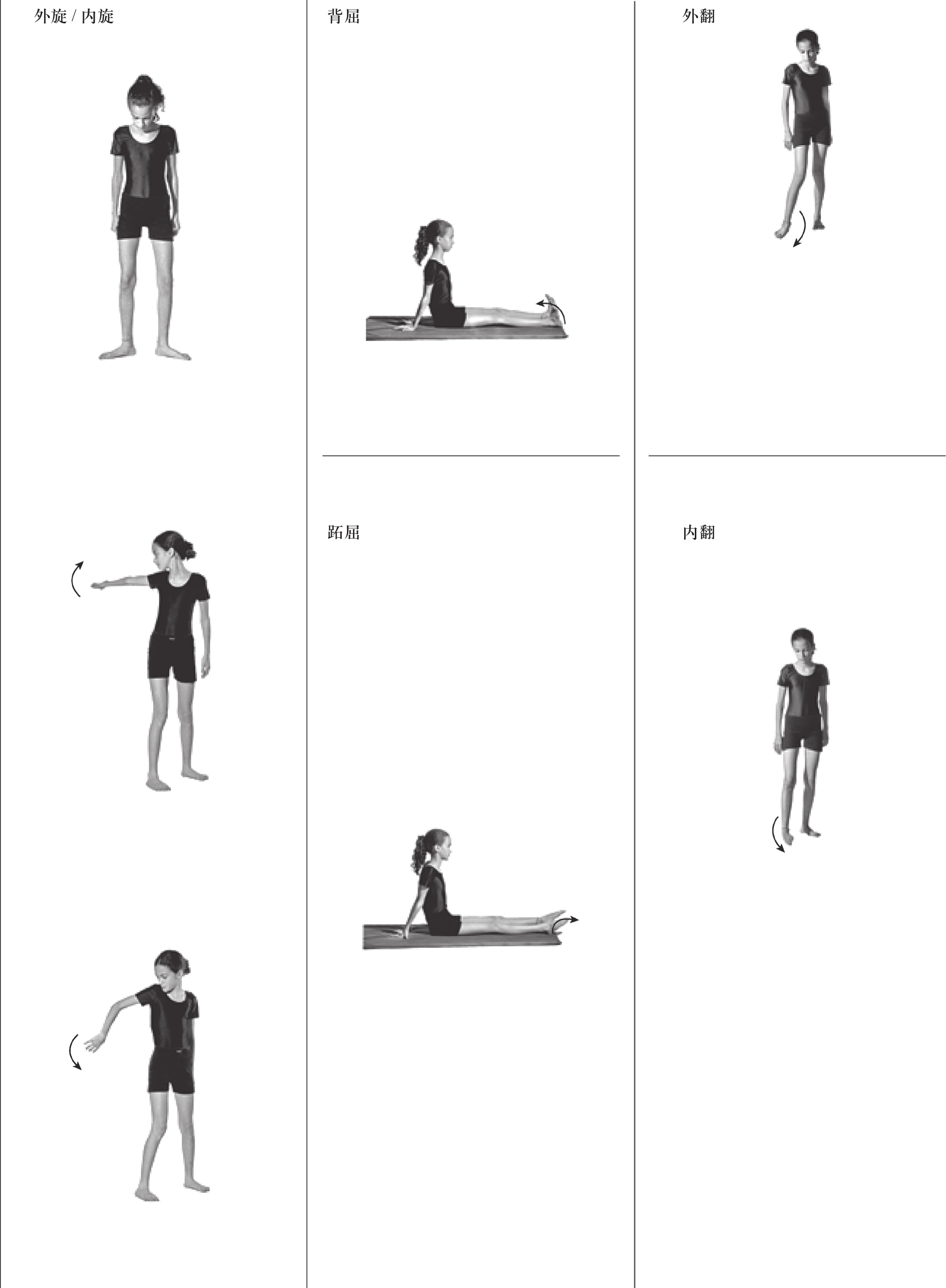
髋关节牵涉到3个平面的动作:
· 矢状面的屈曲与伸直
· 额状面/冠状面的外展与内收
· 水平面的外旋与内旋
· 所有平面上的环绕
髋关节的基本动作范围,由邻近之膝盖与骨盆的关节位置以及肌肉长度而定。在直立的解剖学姿势中,基准的范围如下(Norkin & Levangie,1993):
· 屈曲(膝关节屈曲时):110°
· 伸直:30°
· 外展:50°
· 内收:30°
· 外旋:60°
· 内旋:40°
髋关节外旋的基准范围为60°,较内旋的40°更大。在坐位时,髋关节会屈曲,髋关节旋转的角度也会较大,因为此时的关节囊与韧带较为松弛。作用于髋关节的拮抗肌群必须先达到功能性的平衡,才能让(位于下方的)下肢与(位于上方的)骨盆维持在正常的位置。
额状面上,其中一侧的髋内收肌是另一侧髋外展肌的协同肌。一般来说,内收肌与外展肌从两侧所施加的力量是相等的,若两股力量之间失去平衡,将会使髋关节位置偏移(Nordin & Frankel,1989)。
髋内收肌或外展肌缩短是髋关节失衡的其中一个原因。内收肌缩短,会使该侧髋关节的位置升高,故腿看起来不一样长(图2.17)。
髋关节的水平面平衡,取决于包覆髋关节的内层与外层肌群之间的功能平衡。多数从髋关节连接至股骨的肌肉群,都能够帮助外旋,因此肌肉内旋的力量会较外旋的力量小一些。当两股力量的差异比例超出正常范围时,髋关节外旋的力量会过大,这也是造成脚趾向外姿势(外八)的原因之一(其他原因会在第5章详述)。
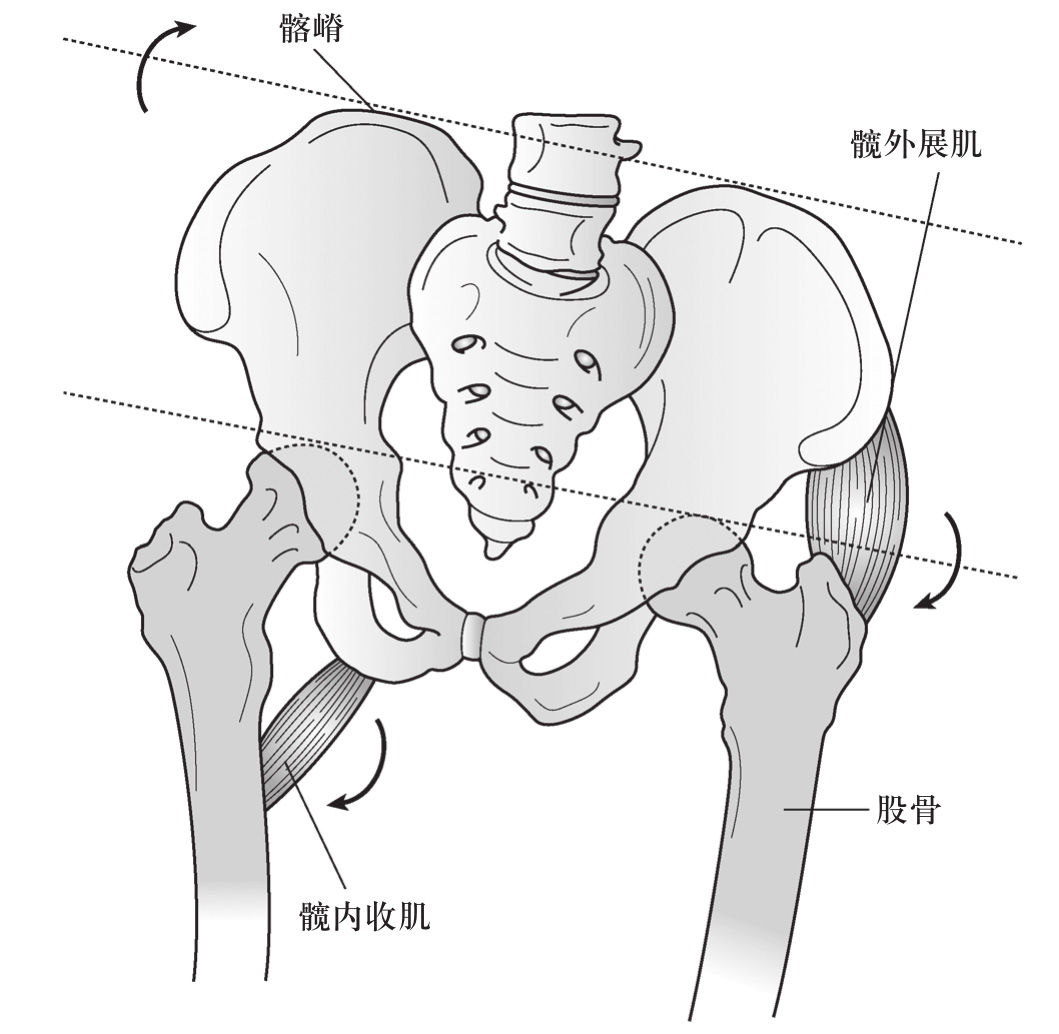
图2.17 因拮抗肌群失去平衡(内收肌缩短)而导致骨盆位置偏移
骨盆(图2.18)在身体的中心位置,在下肢与脊柱之间担任功能链的作用。骨盆之所以能正常运动,是因为肌肉的作用,它可以在动作能力与稳定度之间,维持功能上的平衡。脊柱与骨盆的连接处有一夹角称为骶骨倾斜角(图2.19)。
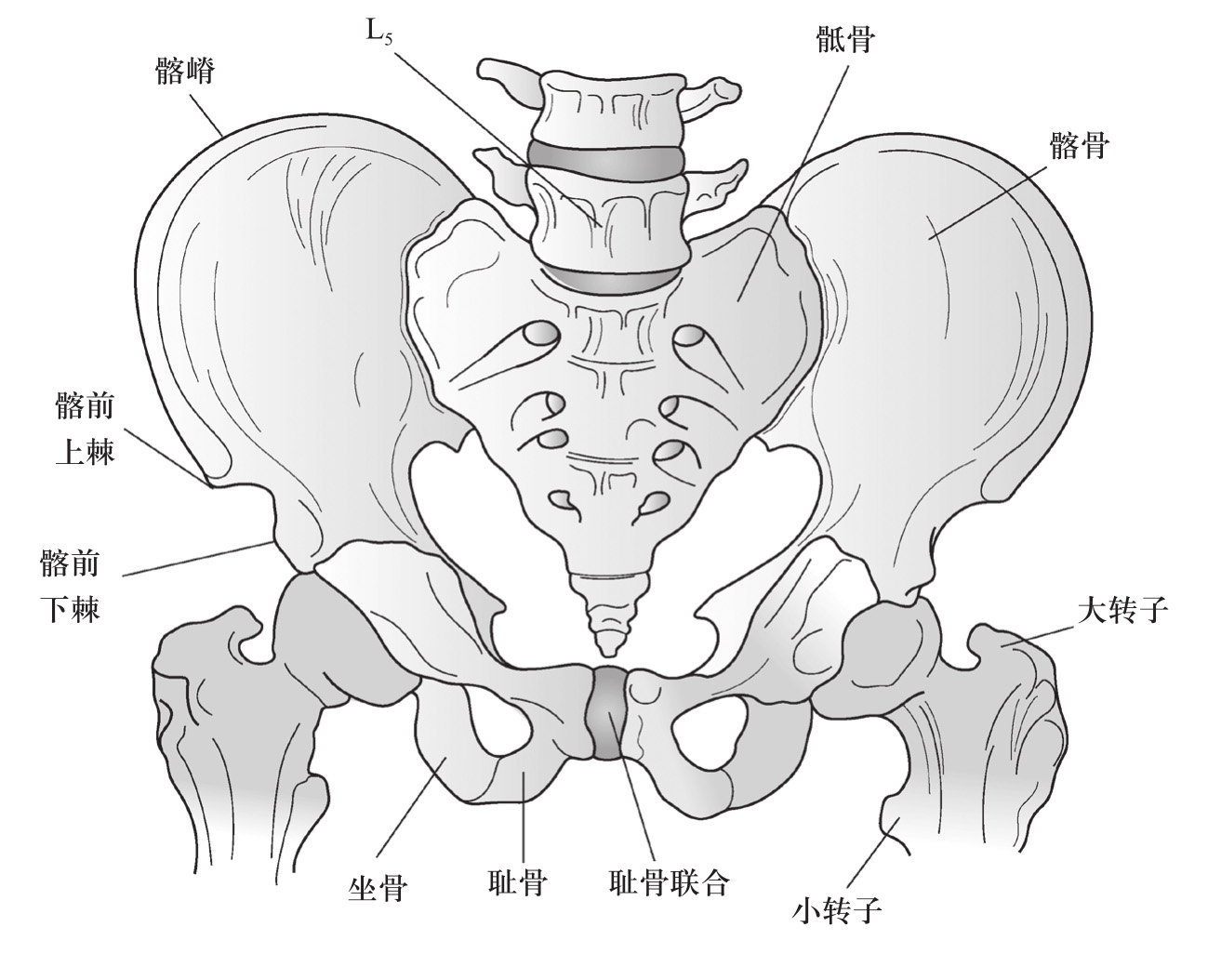
图2.18 骨盆
图2.18是骨盆的自然角度,通常男性的骨盆角为55°,女性则为60°。骨盆角超出正常范围,是脊柱前凸的特殊现象之一,若倾斜角度变小,则会减轻腰椎前凸的现象(Kendal & McCreary,1983)。
骨盆能否平衡在最佳的角度上,主要取决于各种肌肉是否能正常地运动。背部竖脊肌的下半部,与股直肌以及髂腰肌一同使骨盆往前倾斜。换句话说,这些肌肉可以增加倾斜的角度和脊柱的腰椎前凸的角度。在相反的方向,由3个大腿后群肌、腹部肌肉群、臀大肌负责使骨盆往后倾斜,即缩小倾斜角度,并随之减少腰椎的前凸现象(图2.19)。
腰椎在矢状面的姿势正常与否,一部分依赖所有这些肌肉之间的协调。运动治疗的目的是要训练个人(感受)这些肌肉在运动时的正确关系,以及必须改善各个肌肉功能之间的平衡。
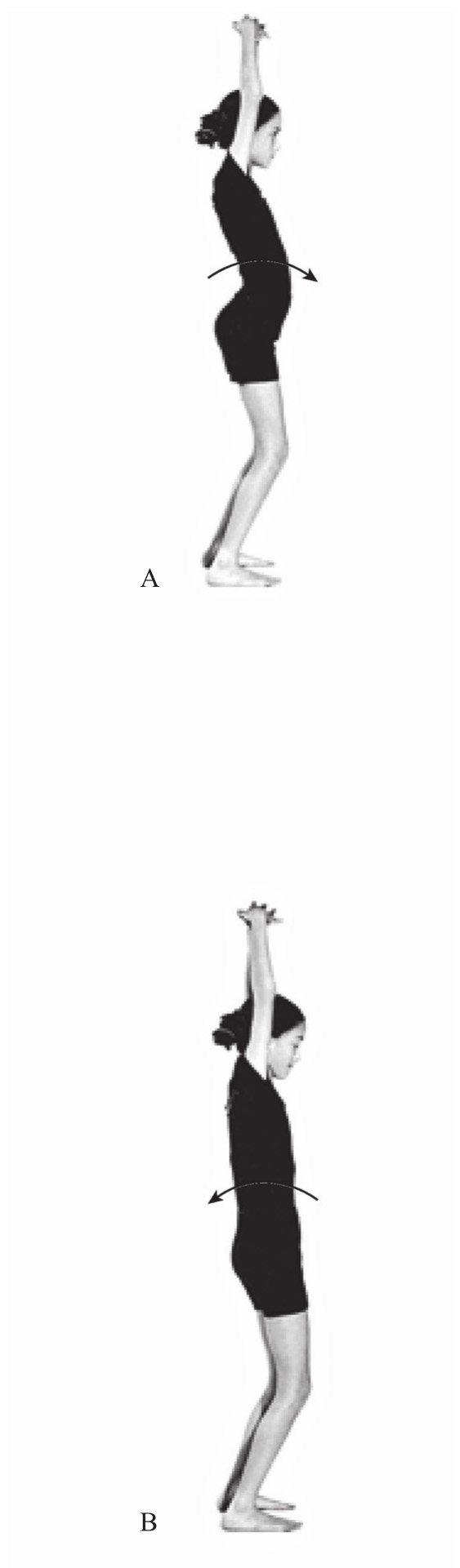
图2.19 (A)前倾与(B)后倾时,骨盆的活动度
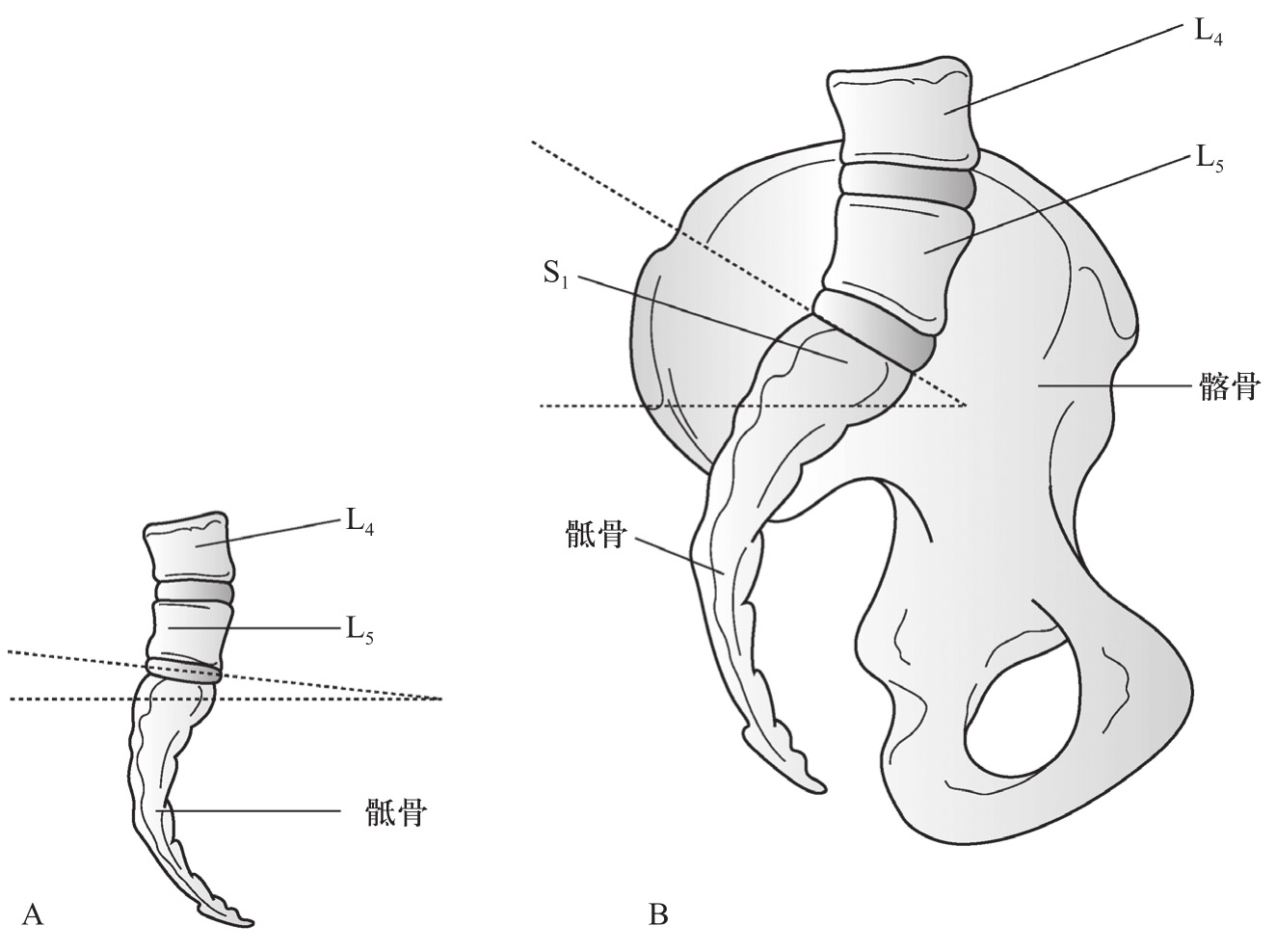
图2.20 尾骨与脊柱(L 5 -S 1 )的交会点
A.角度缩小;B.正常角度
脊柱的腰椎与尾骨之间的连接处,是对日常运动时所产生的负荷非常敏感的集中点。这些压力会使L 5 -S 1 椎间盘的连接点非常容易受伤(图2.20)(Cyriax,1979;Kisner & Colby,1985;Kahle 等,1986)。
骶骨衔接至骨盆的地方,有另一个重要的关节,称为骶髂关节。骶髂关节能在几个平面上产生微弱的滑动动作(图2.21)。骶骨与髂骨之间的各种动作,取决于脊柱的活动度。当脊柱弯曲时,骶骨会向后移动,当脊柱伸展时(向后仰),骶骨则往前移动。
从人体运动学的观点来看,骶骨主要受到躯干各种动作的影响,并随之做出反应。例如,躯干往前弯曲,会使骶骨往后移动,反之亦然。
另一方面,骨盆的髂骨主要受到髋关节动作的影响。因此我们可以说骶骨的位置会依从其上方所施加的力。而确定髂骨的位置,主要是从下面给的力而定。
在闭链运动的动作中,骶骨的位置也会受到从下方来的力的影响(Rasch,1989)。
髂骨相对于骶骨的动作,维持脊柱与下肢之间在静态与动态位置的平衡扮演至关重要的角色。骶髂关节若出现功能的障碍,会造成动作僵硬,长期会导致姿势异常。
详见表2.5。
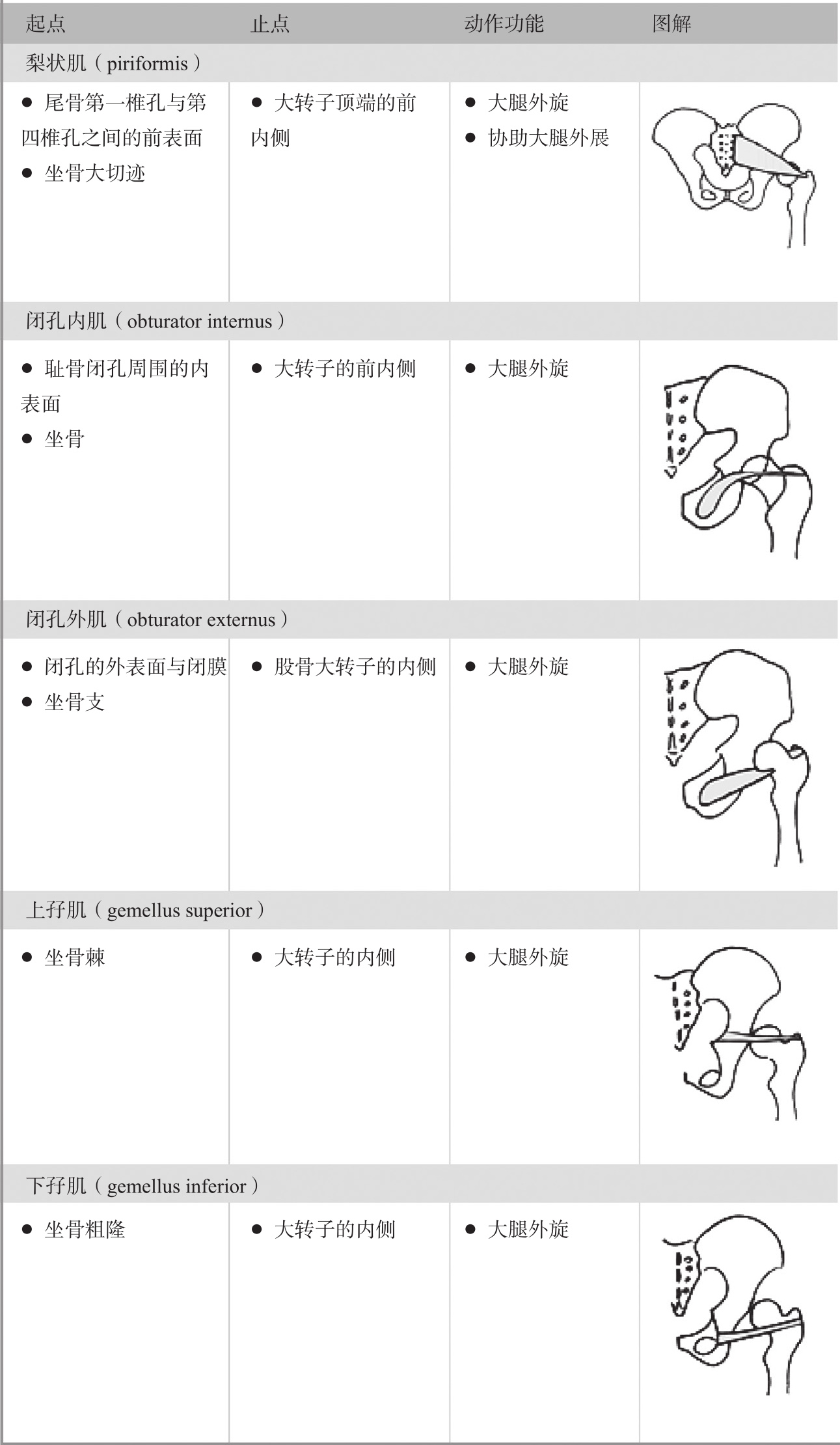
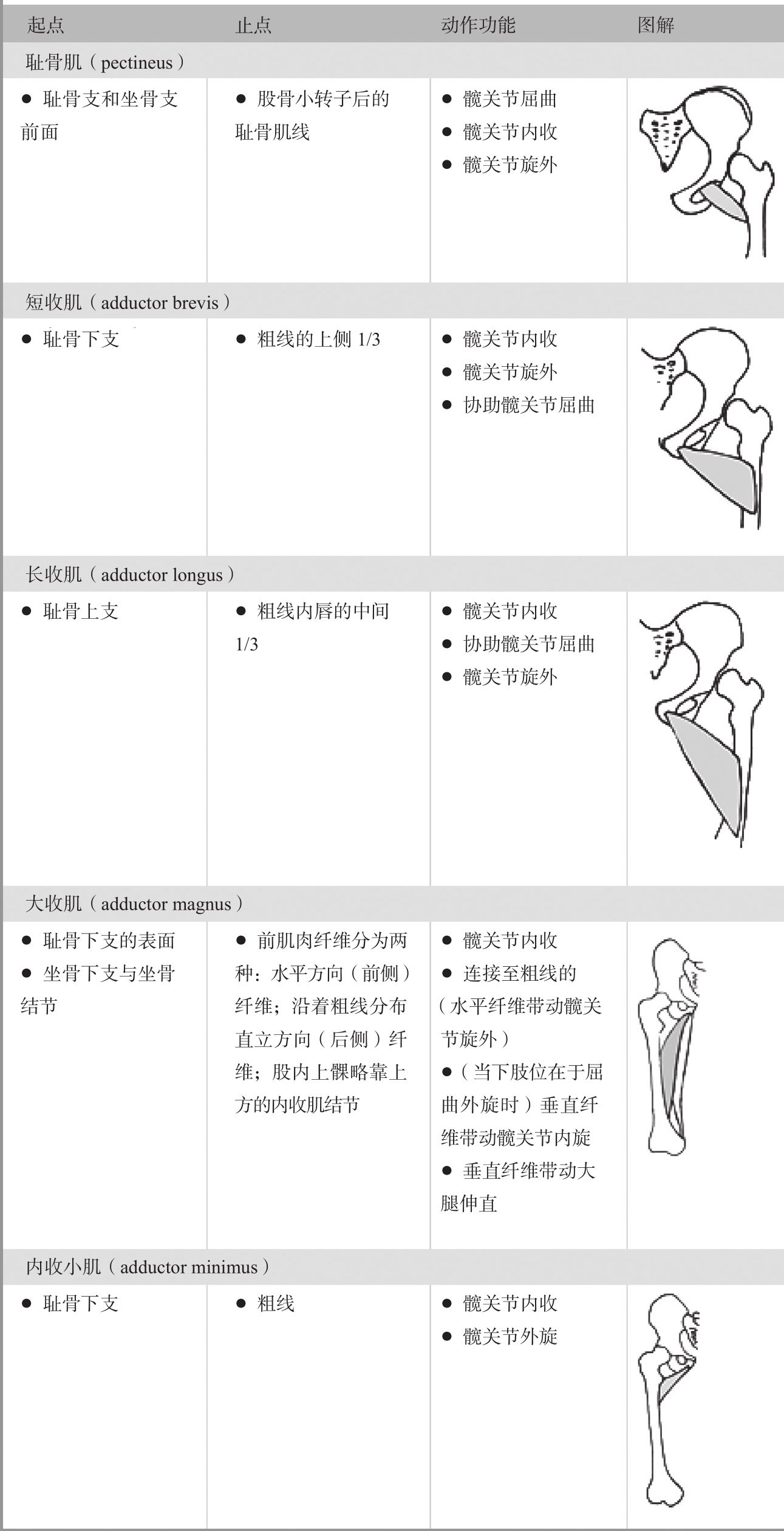
表2.5
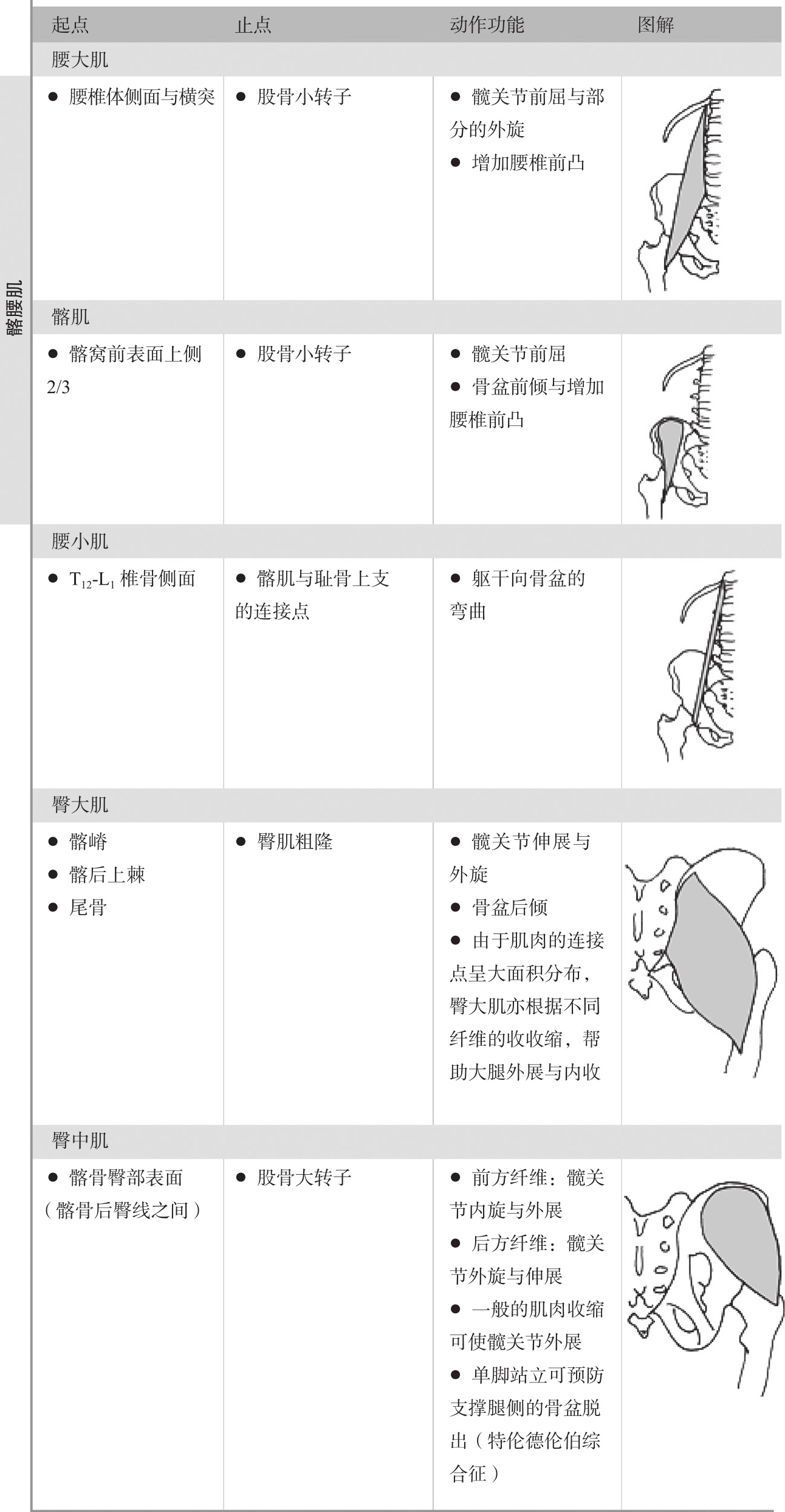
表2.5(续)
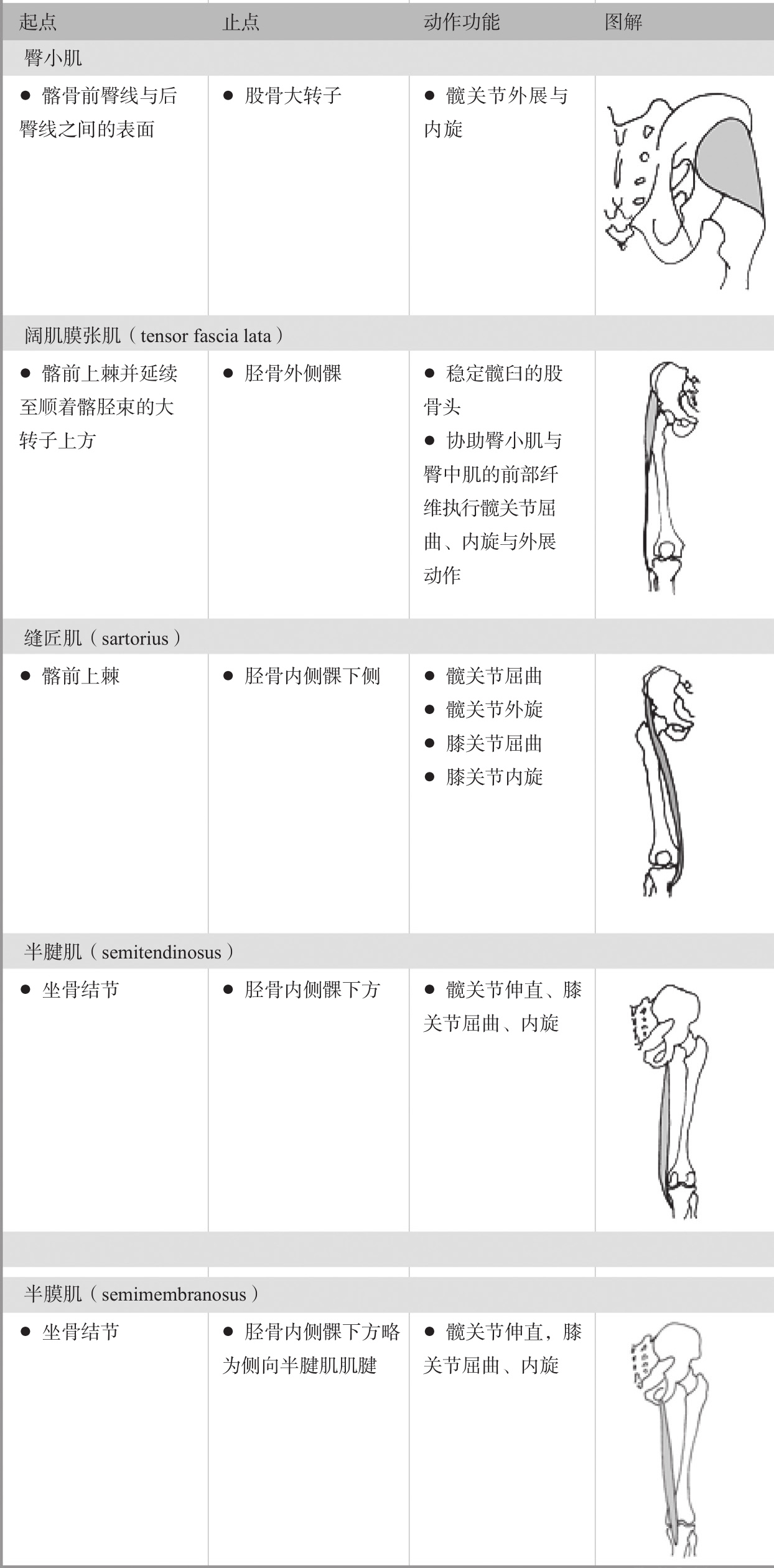
表2.5(续)
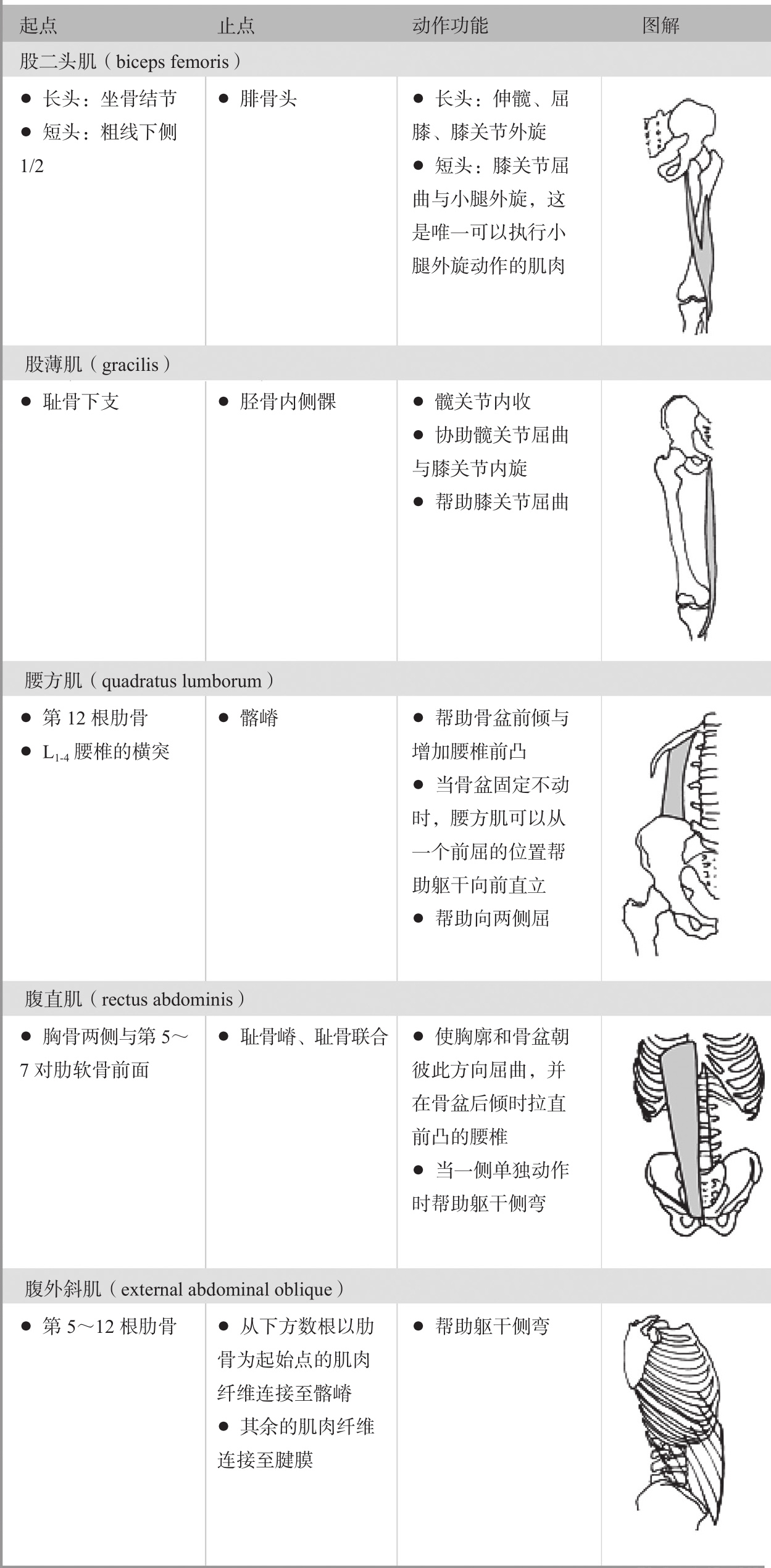
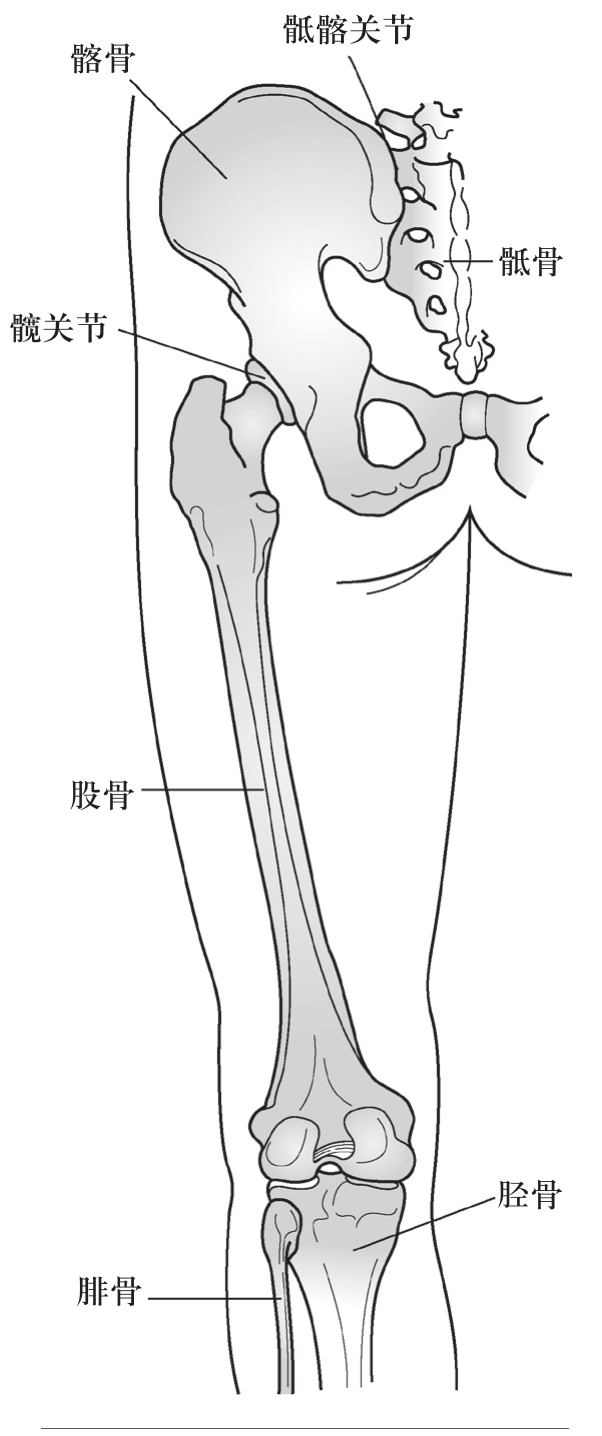
图2.21 髋关节和骨盆的联动关系
在日常活动中,骨盆会根据不同的关节,在数个平面上执行动作(图2.21与图2.22)。以功能来说,骨盆的动作涵盖3个平面:
1.矢状面——骨盆前倾/骨盆后倾(APT/PPT)。
2.额状面——髂骨上提与下降。
3.水平面——带动单侧前旋或后旋。
根据动作联动原则,以及脊柱复杂的功能结构,骨盆的动作常会影响到腰部的几块椎骨,且影响范围并非仅仅集中在L 5 和S 1 的连接点而已。骨盆的结构让我们得以承受重量,从人体运动学的角度来看,它如肩带一样,在同时帮助增加髋关节动作的范围。骨盆的转动,使得我们可以在走路时往前踏步,而骨盆的侧弯,则让下肢在外展时可以向外侧抬。由于骨盆的位置会影响姿势的结构,因此应检查骨盆在3个平面上的位置是否达到完全的平衡。这当中包括了两个最重要的因素:
1. 连接至骨盆的拮抗肌群,其肌肉长度与肌力的比值达到功能上的平衡,会影响骨盆的稳定度。这个平衡在负责骨盆后倾的肌群(包括腹部肌肉群、臀肌肉群与大腿后群肌)与负责骨盆前倾的肌群[包括下竖脊肌、髂腰肌、股四头肌(股直肌)与缝匠肌]之间的比值更为重要。连接至骨盆的软组织如果缩短或无力,可能会打乱此平衡(Kendal & McCreary,1983;Kisner & Colby,1985)。
2. 个人对骨盆适当位置的认知,以及在日常活动中维持此平衡所需的运动知觉处理能力(此部分会在第9章加以详述)。
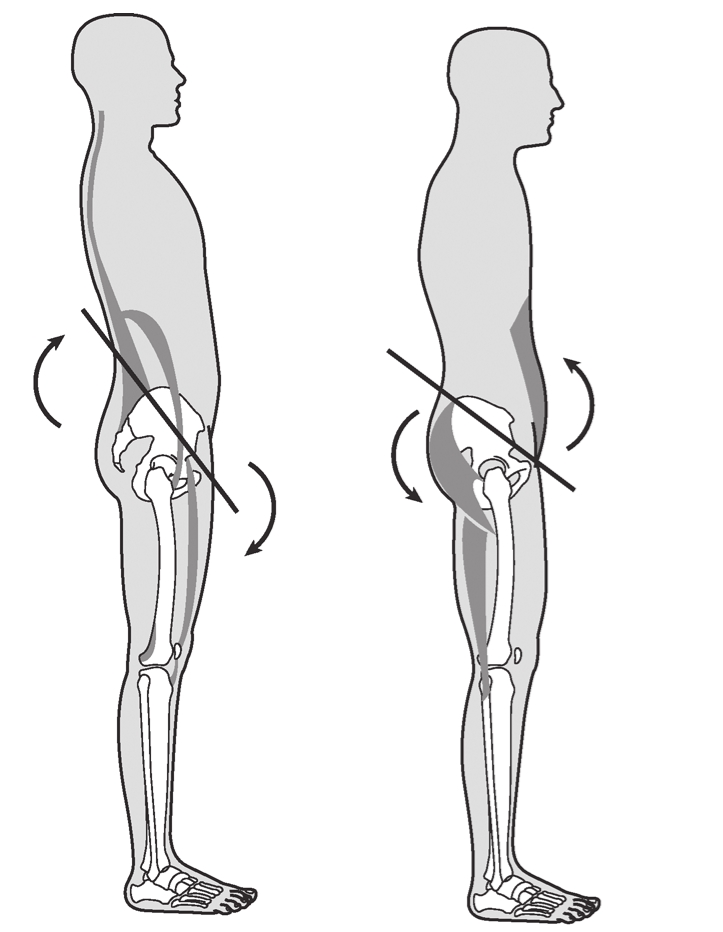
图2.22 会影响骨盆位置的肌肉
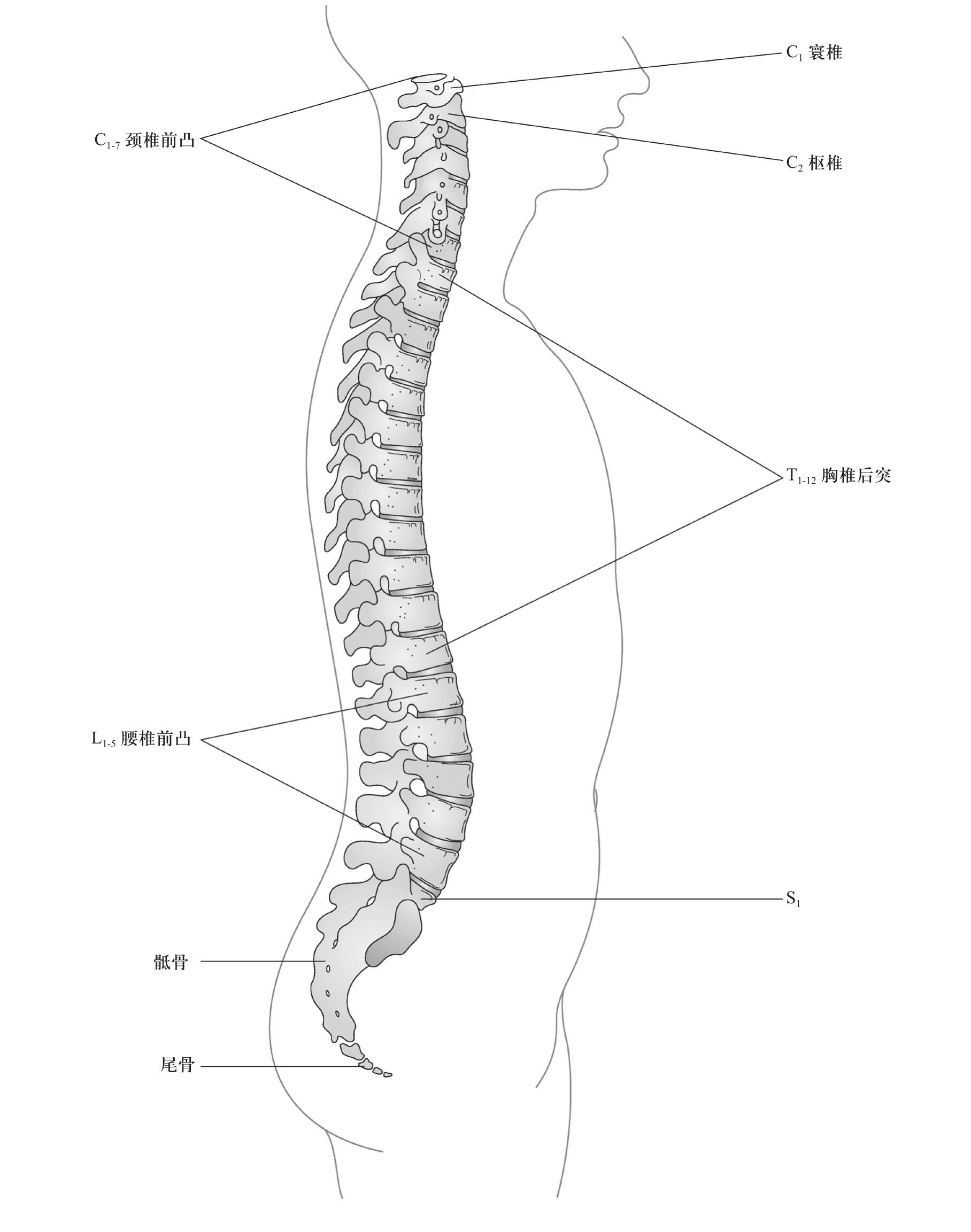
图2.23 脊柱:侧视图、前视图与后视图
椎骨的关节面、椎间盘、肌肉、韧带与神经系统之间所组成的功能上的关系,形成一个错综复杂的系统。它的复杂性使治疗师在诊断与规划适应性运动计划时备感困难。
要有正确的诊断与适应型运动治疗,就必须先了解脊柱在解剖学与人体运动学上的特征。充分了解脊柱结构(图2.23)与各区域的潜在动作所受到的影响,是适当规划运动治疗方案并避免伤害的先决条件。
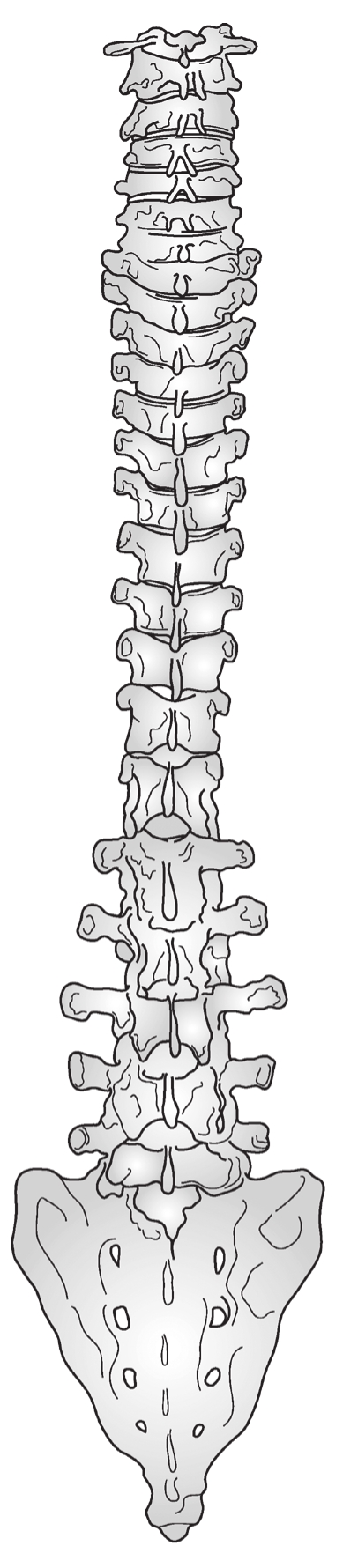
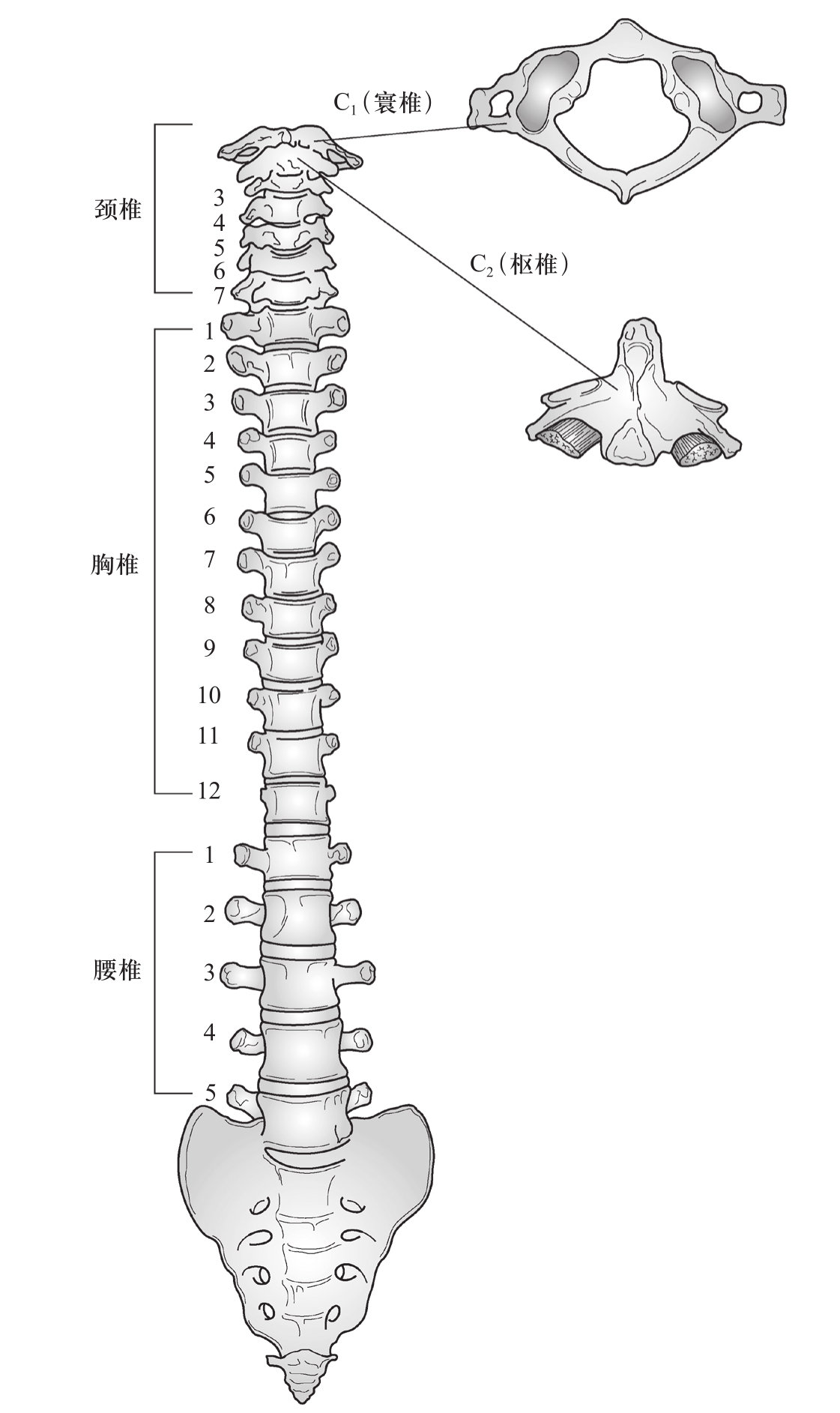
图2.23 (续)
典型椎骨的一般结构(图2.24),椎骨包含两大部分:
· 椎体
· 椎弓
· 棘突
· 横突
· 关节突
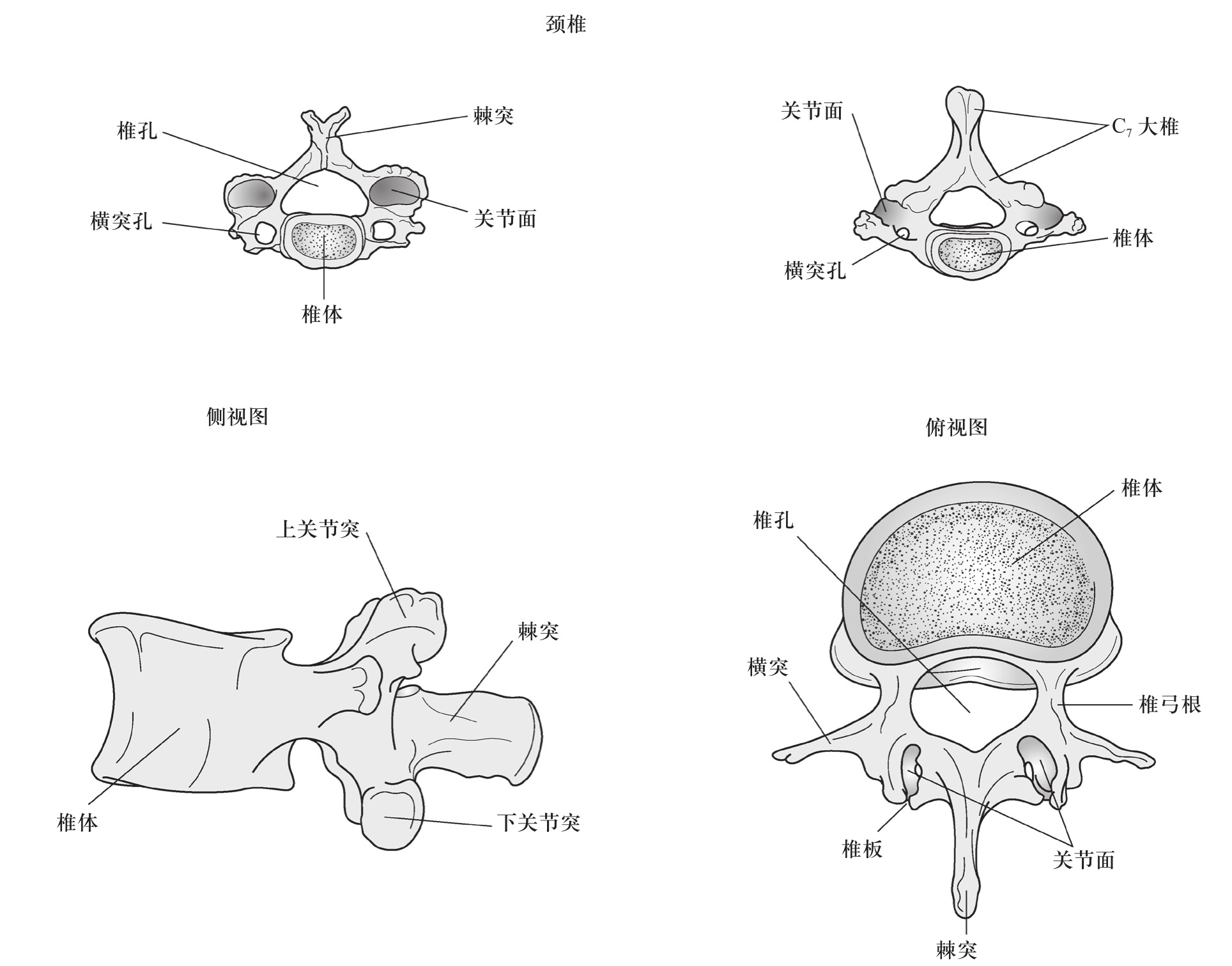
图2.24 椎骨的一般结构
当我们看整个骨骼时,可以清楚地看见脊柱的曲线(图2.23):
· 颈椎前凸(C 1-7 )
· 胸椎后凸(T 1-12 )
· 腰椎前凸(L 1-5 )
脊柱每个区域的椎骨均有其独特性,支配着各种动作。这特性会逐渐在不同区域的交会点变得越来越不明显。
C 1-7 颈部(图2.25)
· 水平面动作(C 1-2 椎骨之间,左右转动头部)
· 额状面动作(颈椎侧弯,将耳朵往肩膀方向靠近)
· 矢状面动作(屈曲与伸展)
T 1-12 胸部(图2.26)
· 额状面动作(躯干侧弯)
· 水平面动作(脊柱转动)
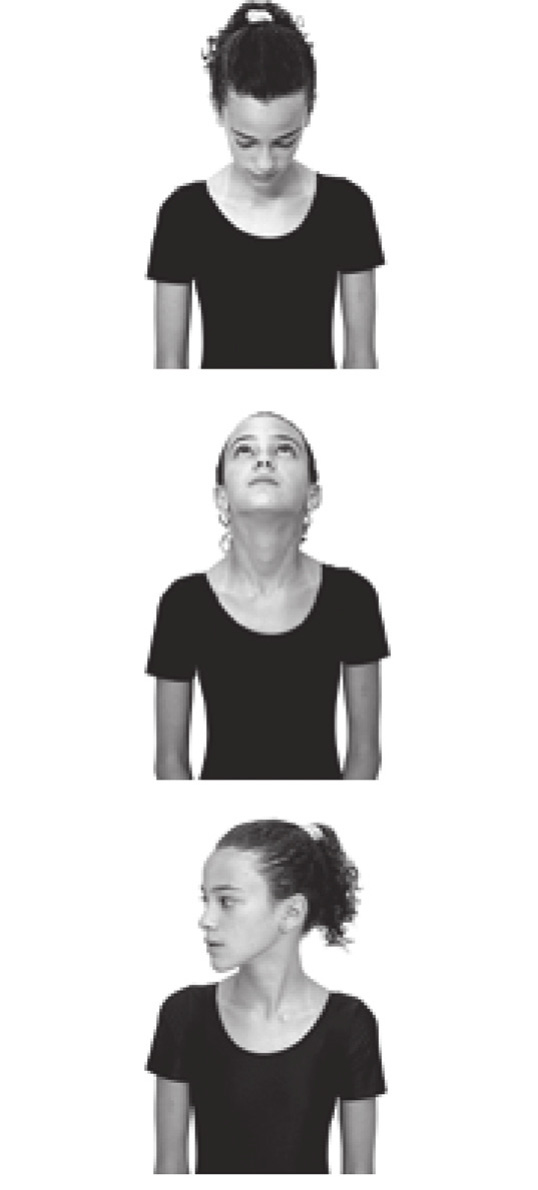
图2.25 颈椎可做的动作
这些椎骨因为其骨骼结构与其连接至胸廓的关系,使得此区域的动作范围相当受限,且我们提到的多数动作均牵涉到其他位于腰部与颈部的关节。
图2.26 胸椎可做的动作
L 1-5 腰部(图2.27)
这些椎骨的主要动作都发生在矢状面(腰的屈曲与伸展)

图2.27 腰椎可做的动作
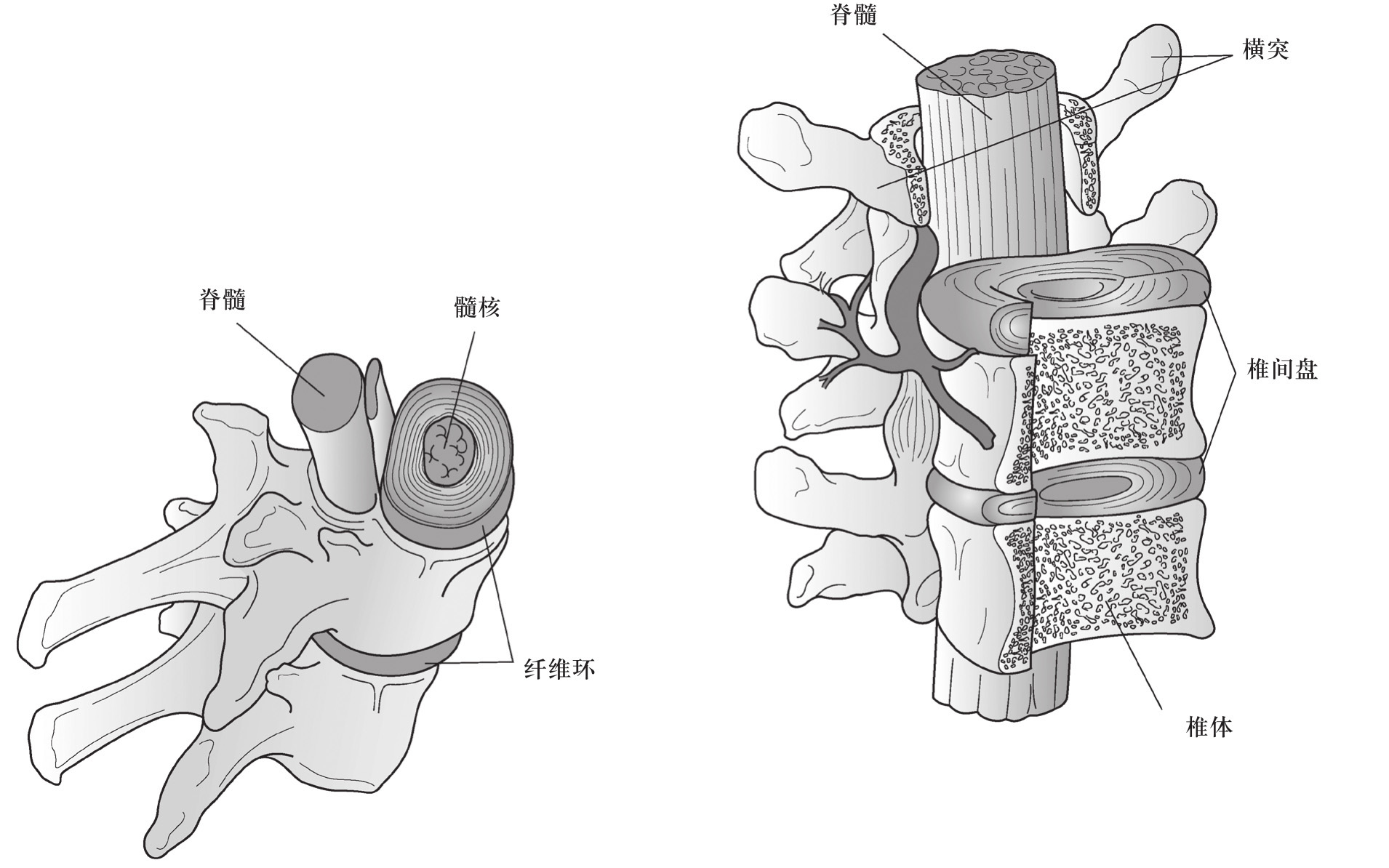
图2.28 椎间盘
椎间盘的功能是支撑与转移椎骨之间的负荷。椎间盘让椎骨之间得以活动,并帮助吸收来自于整个脊柱的震动。椎间盘有两个主要的结构(图2.28):
1.髓核——一种胶状物质,主要由蛋白物质与水组成。
2.纤维环——位于椎间盘的外部,由内含胶原的坚硬结缔组织构成。
脊柱若岀现结构或功能异常,会使椎间盘岀现退化现象。这些过程是长年磨损的结果,椎间盘承受机械负荷的能力会因此降低,并导致椎间盘滑脱、突出等伤害(见第3章)。
韧带的功能是稳定脊柱并限制脊柱在数个平面上的运动。沿着整个脊柱的主要韧带见图2.29~图2.31。
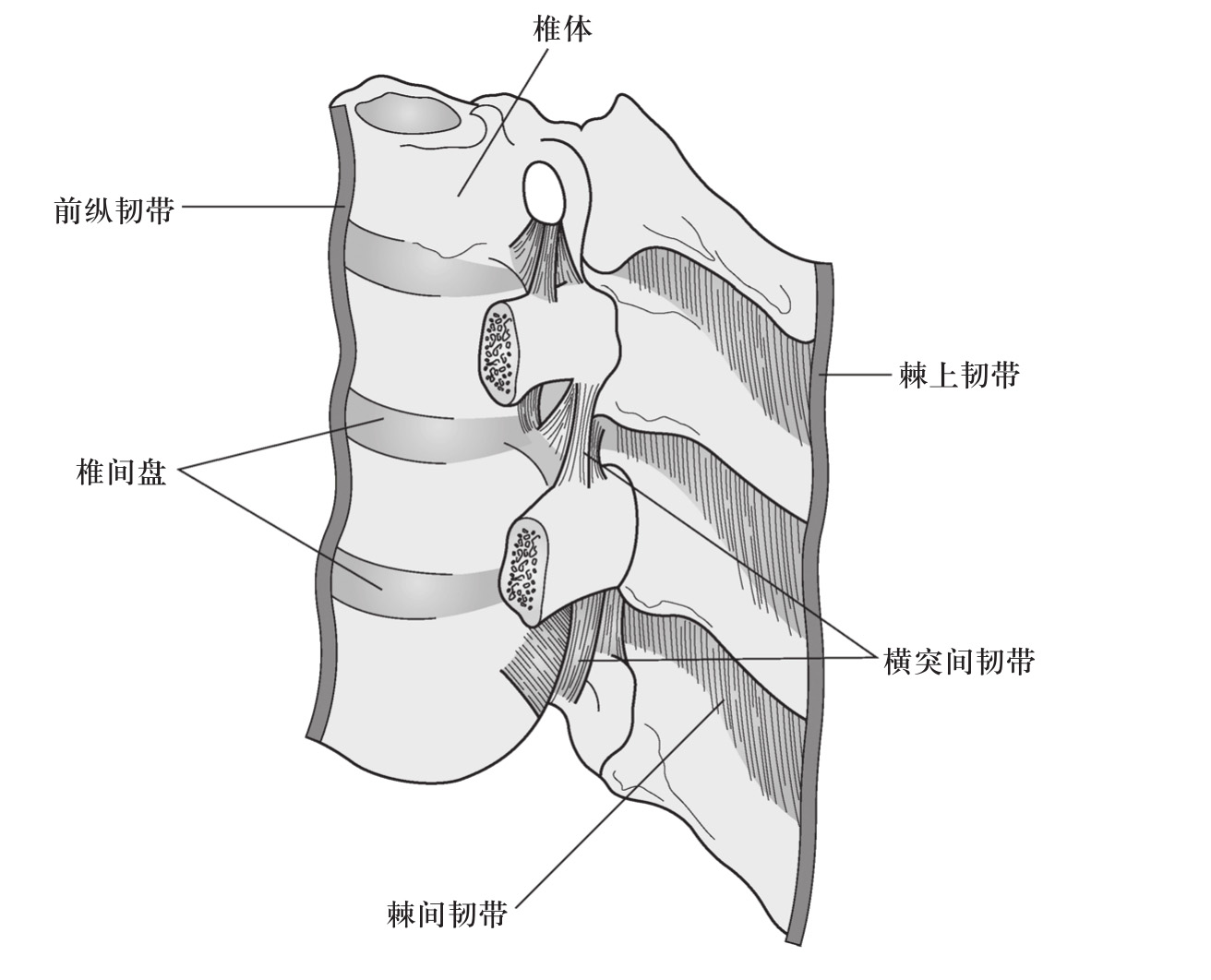
图2.29 脊柱韧带(侧视图)
1. 前纵韧带通过整个脊柱的前端。前纵韧带可限制身体后屈的动作。
2. 后纵韧带穿过椎孔并跨越椎骨的后端。后纵韧带经过并与每块椎骨连接,形成椎管的前壁。
3.黄韧带构成椎管的后壁。
4. 棘间韧带位于上下相邻两节椎骨的棘突之间,可限制脊柱向后伸展与躯干前屈。
5.棘上韧带跨越后棘突,可限制身体前屈。
6. 横突间韧带位于上下相邻两节椎骨的横突之间,可限制躯干在额状面的侧弯动作。
深层竖脊肌群必须不断抵抗地心引力,并帮助脊柱执行动作与保持脊柱的稳定度。
从解剖学的角度来看,竖脊肌分布在脊柱的两侧,由中心往外展开。竖脊肌可分为两个群组:
1.外侧——浅层群组(在背部从骨盆穿越至头骨)。
2. 内侧——深层群组(其中某些肌肉呈纵向分布,某些呈斜向分布)。
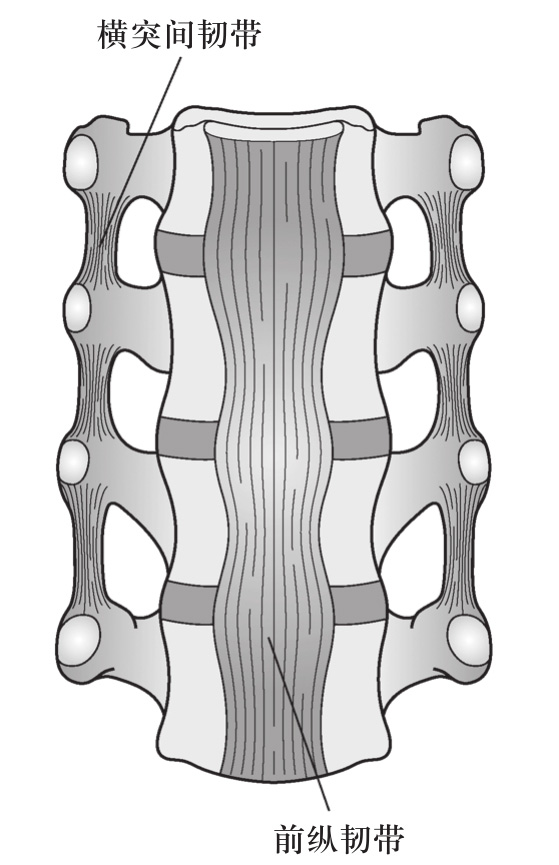
图2.30 脊柱韧带(前视图)
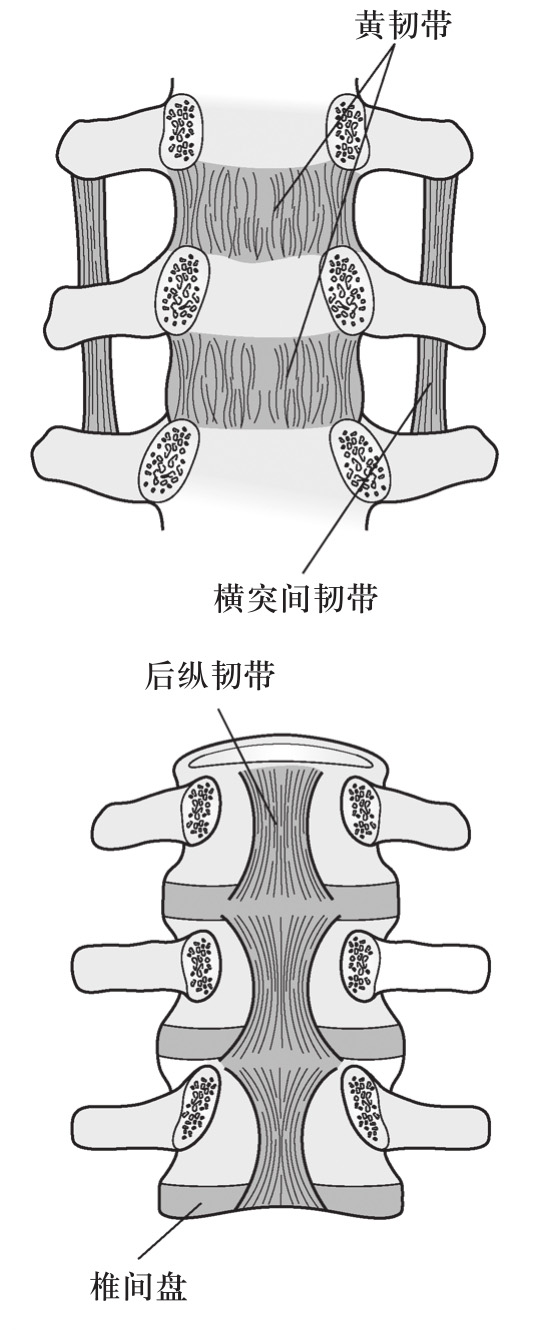
图2.31 脊柱的纵切面
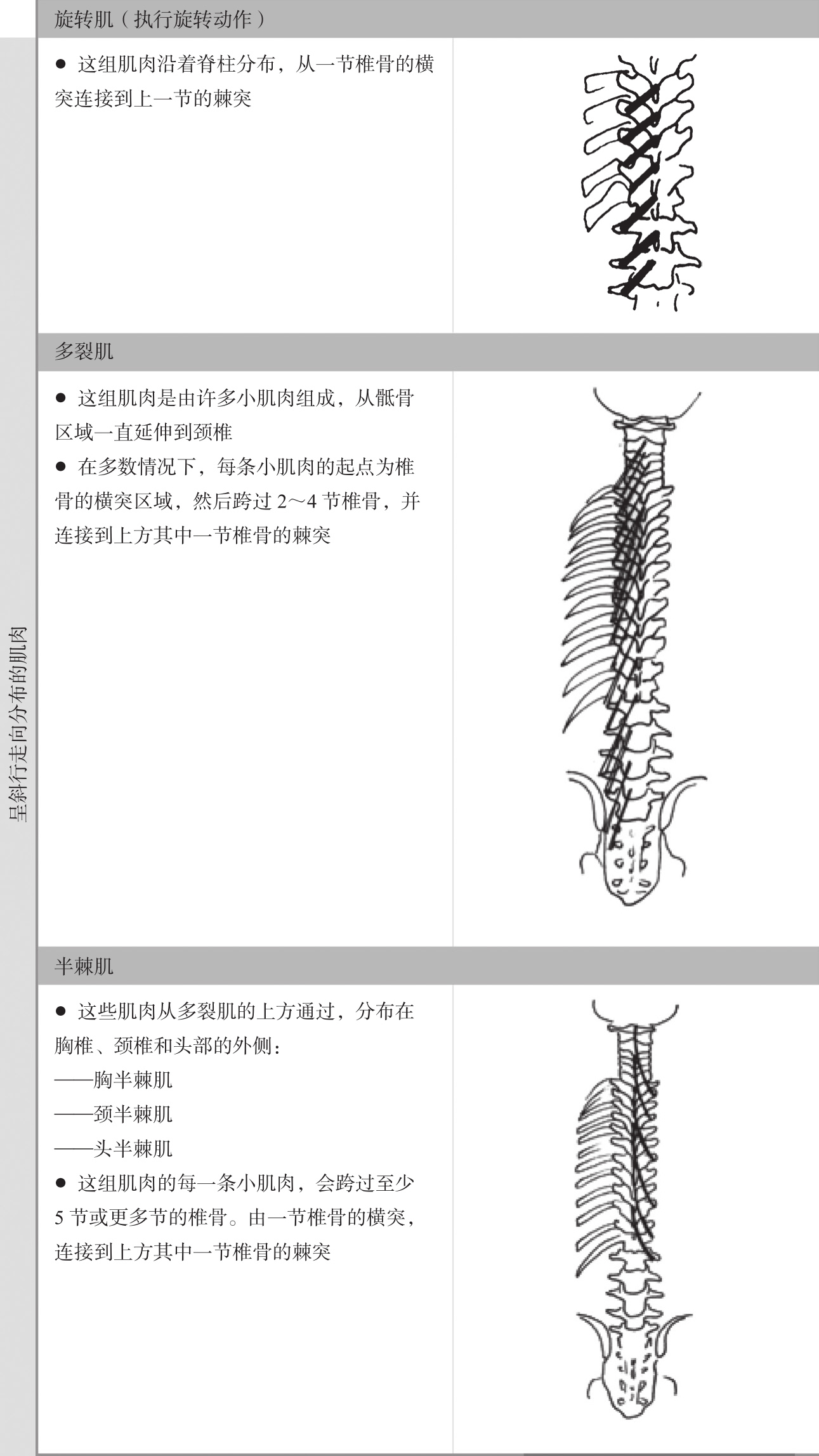
外侧(浅层)群组可细分为三类(表2.6a):
表2.6a
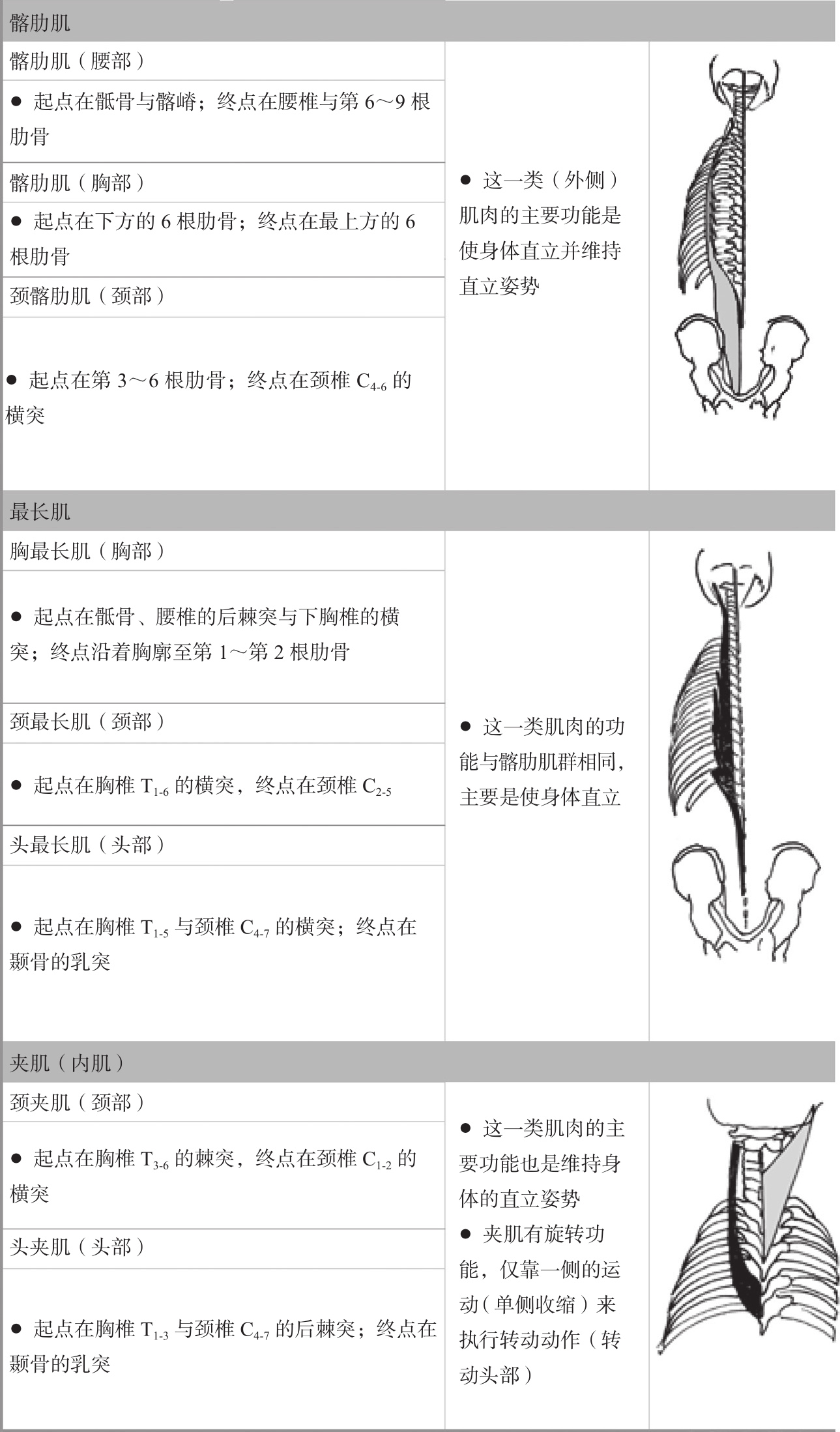
内侧(深层)群组可细分为两类(表2.6b):
表2.6b
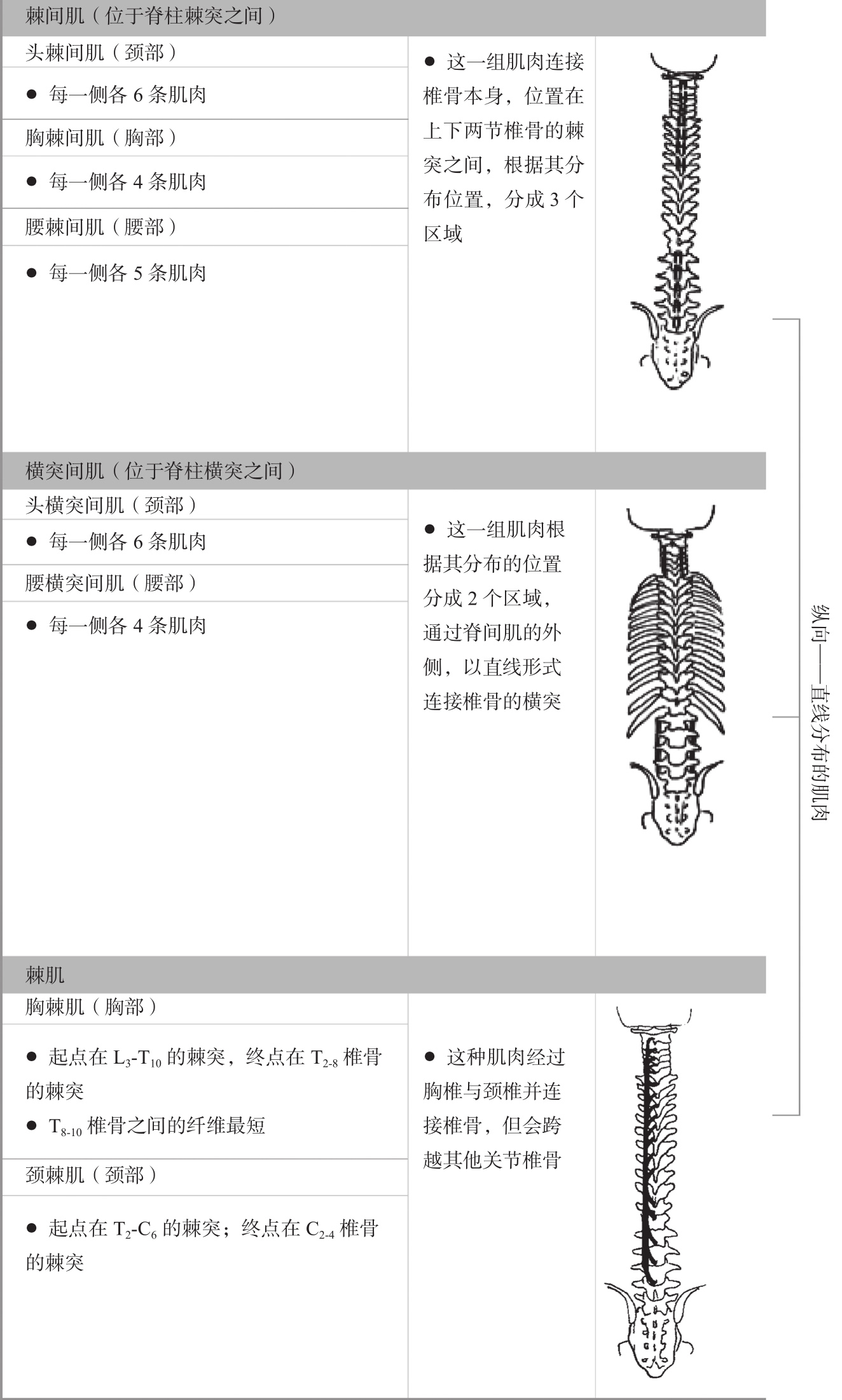
内侧——深层肌肉群组(表2.6c):
*深层肌肉的动作:
· 呈直线走向分布的肌肉群,主要可使背部挺直,且两侧一起活动时,可使背部往后伸直。只有单侧肌肉收缩的时候,可使躯干侧弯。
· 斜向分布的肌群,当单侧肌肉收缩时,可以使躯干进行水平面的转动,当两侧同时收缩时,可使背部往后伸直。
表2.6c
复杂的脊柱结构,可以帮助脊柱在许多平面上完成各式各样的动作。这些动作是由每节椎骨之间依照整个脊柱整体结构所产生的小部分动作联合而成。因此,一般的椎骨活动度,会依照骨间许多小关节的活动功能而定。如果某个局部小关节位置受到限制,不但会直接影响到该区的动作,也会间接影响到上面与下面的区域(Tendler,1970;Kahle 等,1986)。
因为肌肉相互关联的缘故,连接到脊柱结构的其他部位的活动也能影响到脊柱的功能:
1.骨盆:骨盆与脊柱的下端连接。
2. 胸腔:胸腔与胸椎骨连接。胸腔的动作主要在肋骨与椎骨之间(肋椎关节),以及肋骨与肋骨之间(呼吸过程中的动作)(Kahle等,1986)。
对这些结构有所了解之后,我们认识到在人体运动学层面,骨骼系统的各功能之间的复杂关系。每个关节包括脊柱的活动度,都会对身体其他区域的活动度有间接的影响。这些相互关系也表明,可以借由髋关节、骨盆关节或胸廓关节来放松或解决许多背部的问题(这些治疗原则会在第9章有详述)。
头部与颈部位置的平衡,对姿势的构成有重要的意义。颈椎不正确的姿势时间过长,会使颈部伸肌的肌肉张力升高,长期可能对分布在颈椎的神经结构有负面的影响。这类问题通常会导致头痛、影响通往手部正常的神经传导,有时甚至会阻碍正常的血流。这些异常现象通常会引起颈部的不适、紧张、疲劳,以及经常性的疼痛(Steindler,1970;Rasch,1989)。
从人体运动学的观点来看,头部与颈椎关节的排列,与下方身体各关节之间有相互的关系。在下肢、骨盆、脊柱中(图2.32),针对改善头部与颈部倾斜的运动治疗过程,或许也能间接地改善下方的区域,如肩带、胸廓、腰部;相反地,对于下半身关节的治疗,或许对头部倾斜状况也有积极意义。至于在运动治疗计划中该从哪一部分介入,则因人而异,应该依每位患者其独特的人体运动学姿势特征而定。
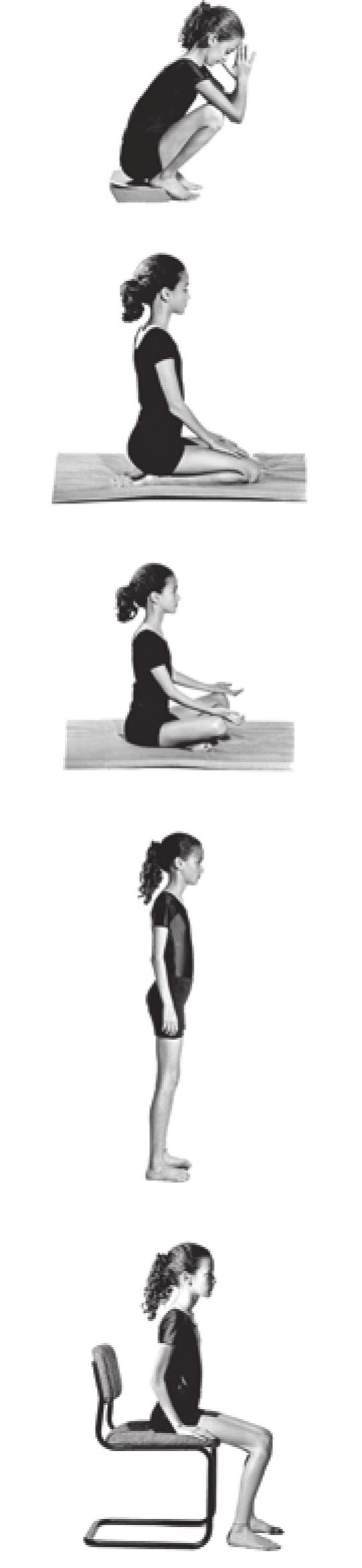
图2.32 头部在不同初始位置的姿势
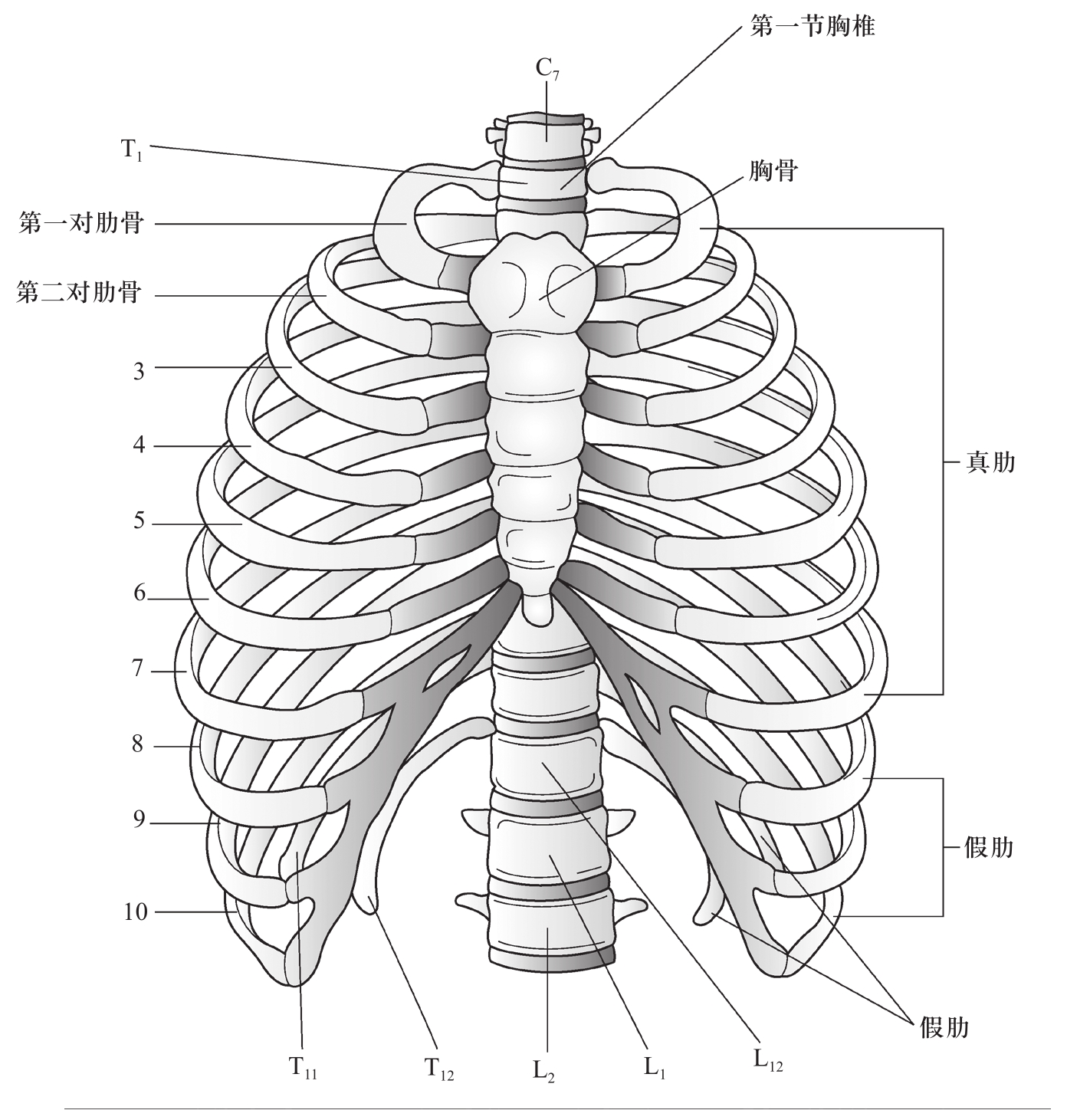
图2.33 胸廓
从解剖学上来说,胸部的骨骼结构也就是胸廓,是一个由12节胸椎(T 1-12 )与12对肋骨以及胸骨所构成的骨架(图2.33)。胸廓的主要功能:
· 保护内部系统(心、肺、大血管、神经)
· 成为许多肌肉的中心点
· 主动协助呼吸过程
前七对肋骨经由软骨直接连接到胸骨,称为真肋。
第八对到第十对肋骨经由软骨连接到第七对肋骨,称为侧肋。
第十一对与第十二对肋骨称为假肋,并未连接至胸骨。
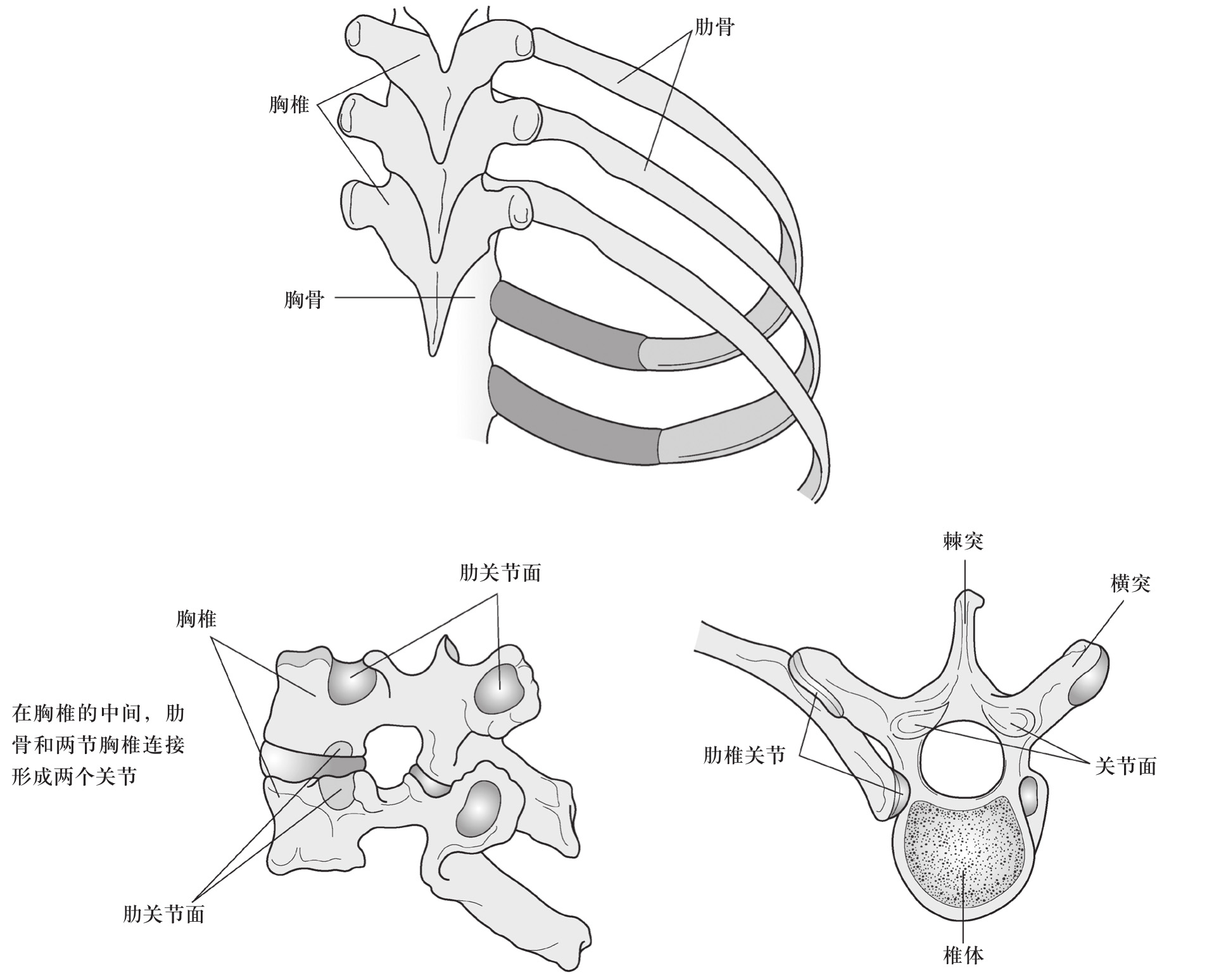
图2.34 胸廓与胸椎
肋骨在连接到胸骨与椎骨时,会形成数个关节。其中有两个关节在功能上尤其重要:
· 肋椎关节(图2.34)
· 胸肋关节
就内部身体系统功能而言,最佳的胸廓结构与动作,对呼吸过程有直接影响。因此,从功能性来看,呼吸与许多连接至胸廓的关节有关,其中包括连接至背部椎骨的关节、肋骨与T 1-12 椎骨之间的关节,以及连接肋骨与胸骨的关节。这些关节必须要有正常的活动与运动,才能保持最佳的呼吸深度。如果在活动上受到任何形式的限制(例如脊柱后凸等状况——见第3章),会对呼吸功能产生不利的影响,当然也连带影响姿势特征和内部系统功能。
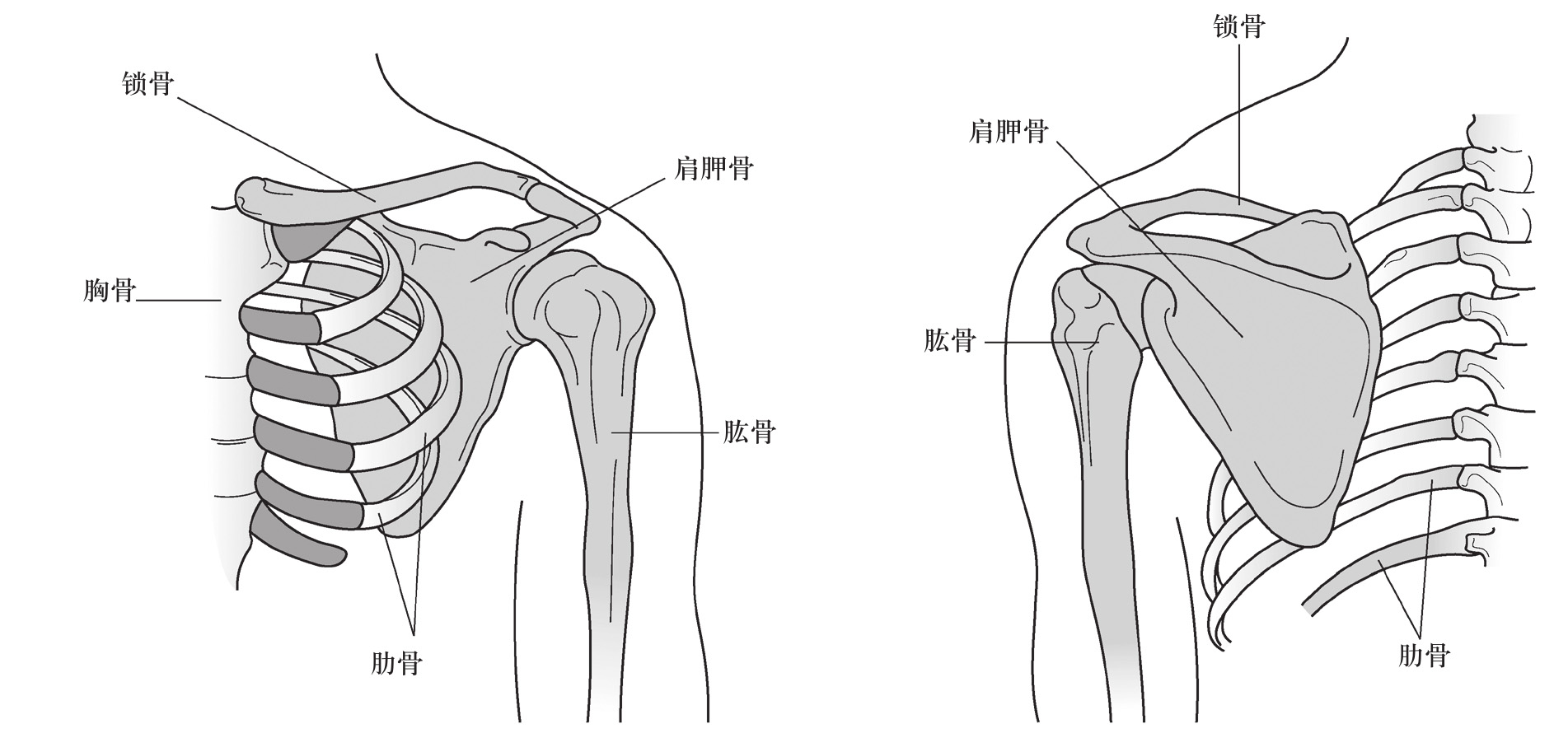
图2.35 连接至肩带的骨头
连接至肩带的骨头包括肩胛骨、锁骨、胸廓、肱骨(图2.35)肩带由4个关节组成,相互和谐且同步运动,在3个动作平面上带动各式各样的动作(White & Carmeli,1999):
1. 肱盂关节:位于肱骨与肩胛骨的连接处。这个滑膜球窝关节可在3个平面上执行动作。肱盂关节由软骨环包围,且有许多韧带加以支撑,并透过旋转肌群与肱二头肌的长头提供其稳定性(Kendall & Mccreary,1983)。
2. 肩锁关节:位于肩峰端与锁骨外端的连接处。这个滑液关节可在几个平面做环绕的动作。
3. 胸锁关节:位于胸骨与锁骨内端的连接处。这个关节是上肢骨与躯干骨之间唯一的连接点。
4. 肩胛胸廓关节:位于肩胛骨与胸廓的交会处。许多止点在肩胛骨、脊柱与手臂的肌肉,都在这个区域运动。
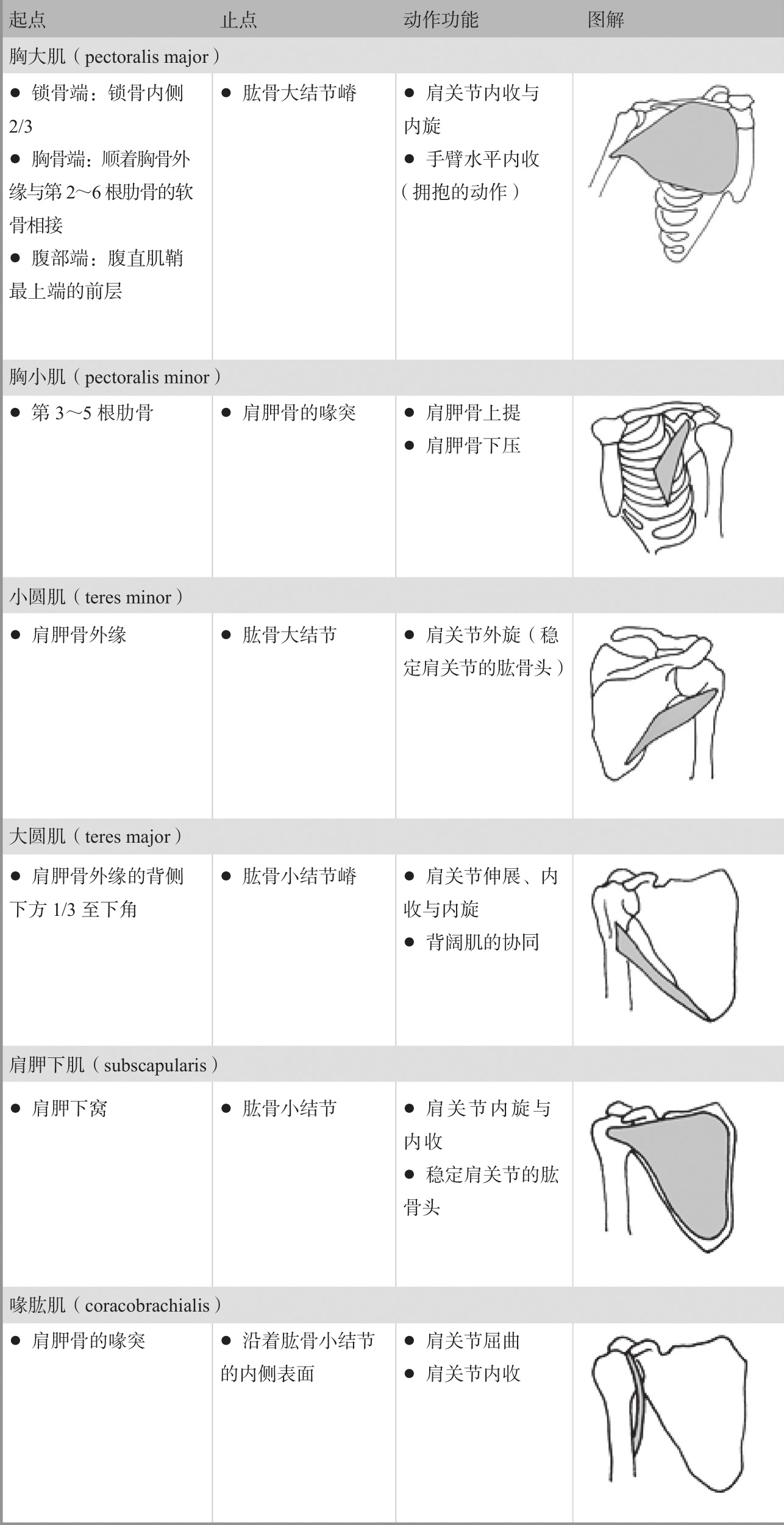
表2.7
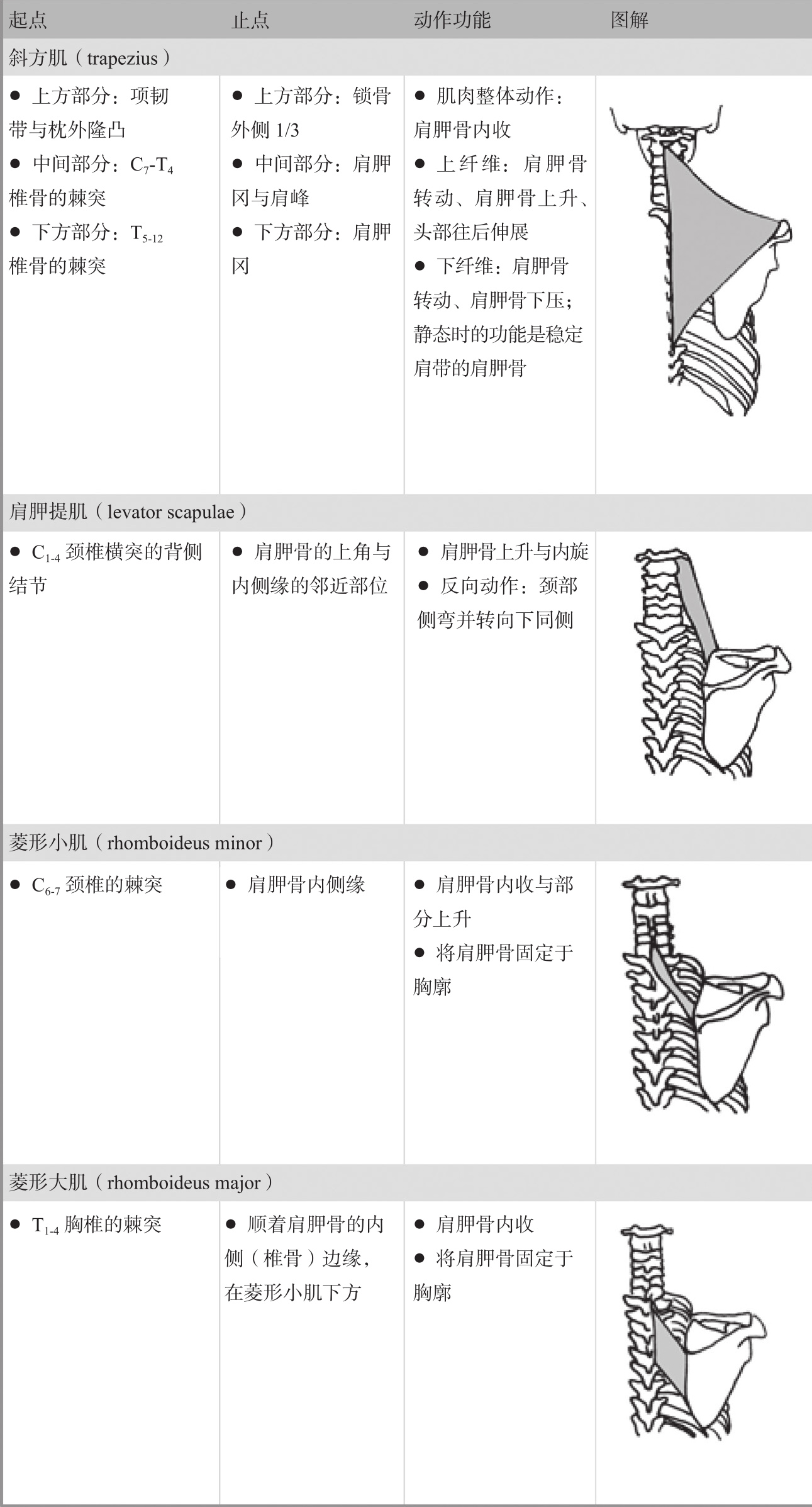
肩胛骨上有许多肌肉附着,可帮助上肢自由地活动。
与髋关节有非常稳定的结构不同的是,肩关节的解剖学结构较为脆弱。旋转肌群具备重要的功能,可维持关节的稳定性,并将肱骨头往肩胛窝挤压(Hoppenfeld,1976)。
旋转肌群包含下列肌肉:棘上肌、棘下肌、肩胛下肌、小圆肌。
*接下来会详细描述肌肉群中各个肌肉所做的特殊动作。
表2.7(续)
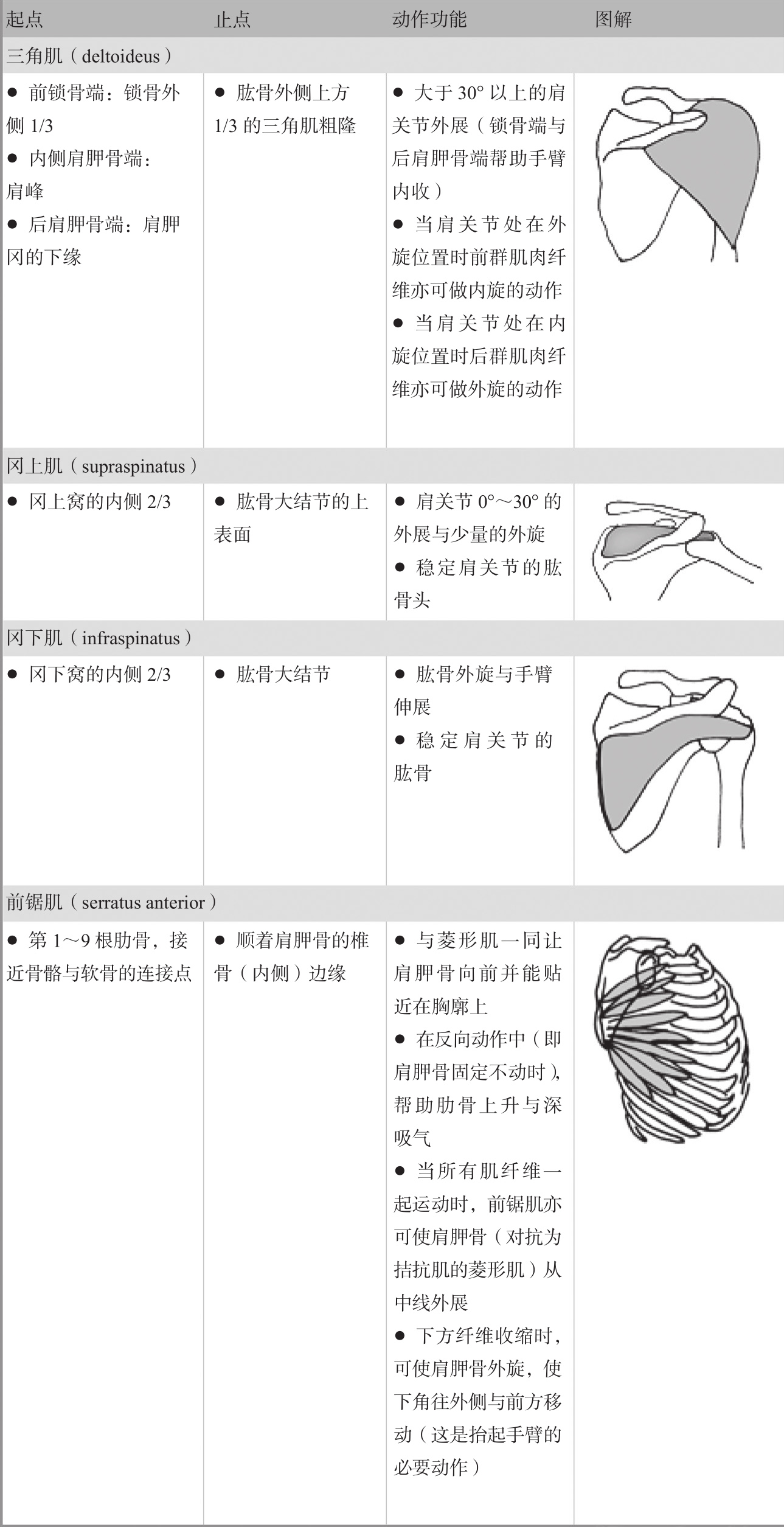
表2.7(续)
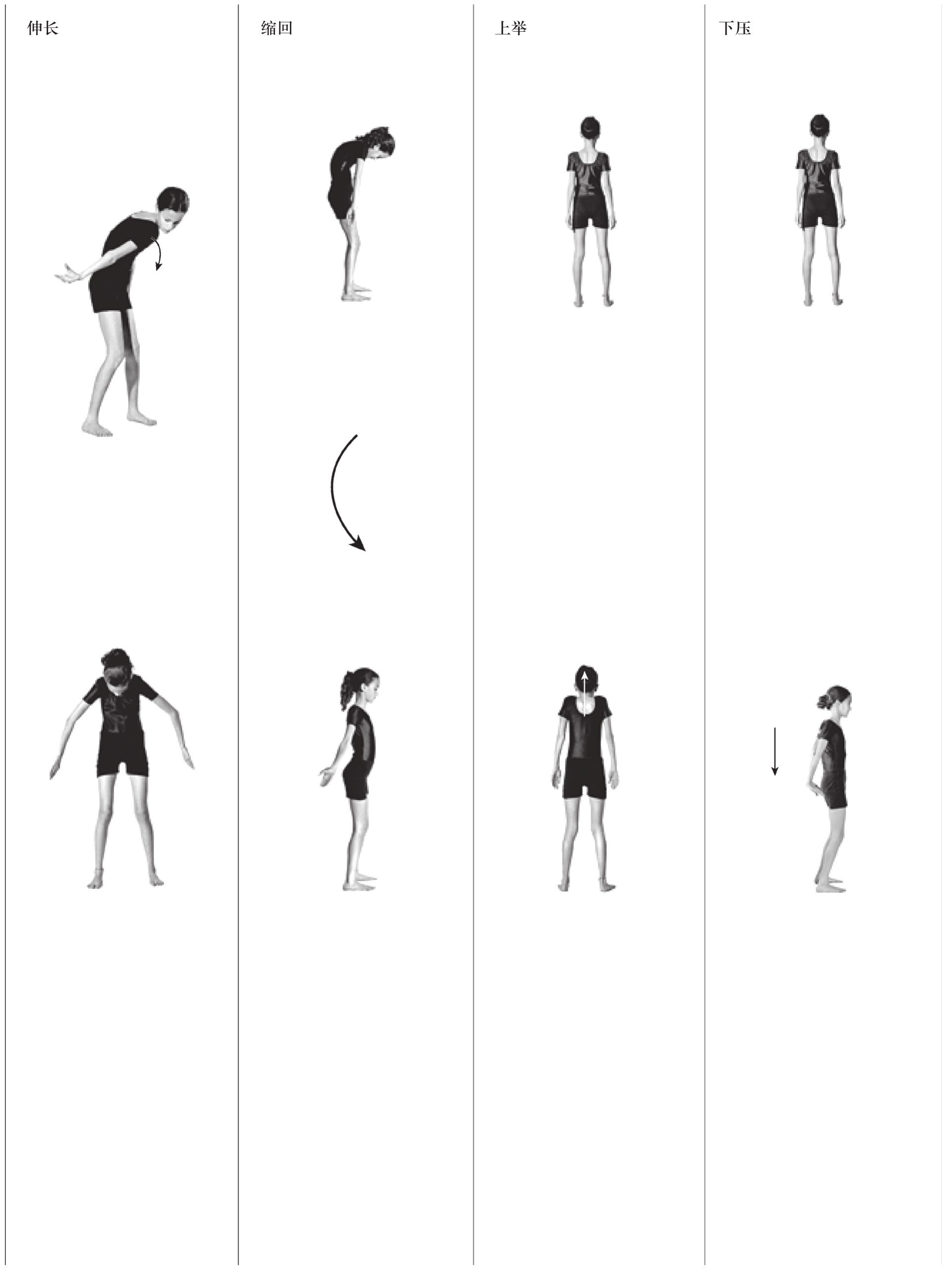
正如前面所提到的,肩胛骨在与锁骨和肱骨的连接处有两个滑液关节,分别为肩锁关节与肱盂关节。这些关节可以让肩胛骨做出如下动作:
· 上提——下压
· 后缩——前突
· 外旋——内旋
· 内收——外展
肩胛骨与肱骨之间有一个特别重要的动作顺序,称为肩胛肱骨节律,主要为各种手臂外展/内收的动作。
在人体运动学上,这个外展的动作可以分成3个阶段(Rasch,1989;Hamilton Luttgens,2002):
第一阶段:手臂外展到0°~30°之间时,肩胛骨固定不动。
第二阶段:在30°~90°之间,肩胛骨的外旋动作会以2∶1的比率,回应手臂的外展动作,即手臂每外展2°,肩胛骨就会旋转1°。
第三阶段:手臂外展超过90°时(及至180°之前),此功能比变为1∶1,即手臂每外展1°,肩胛骨就会外旋1°。
上肢外展的另一个方面是手臂在水平面的位置。在一般情况下,外展的范围可达120°。在这个时候,肱骨的大结节会碰到肩峰而停止不动。但从这个角度开始,若手臂要继续做外展的动作,则需要由手臂外旋,以解除这个“解剖限制”的状况(Hoppenfeld,1976)(图2.36)。
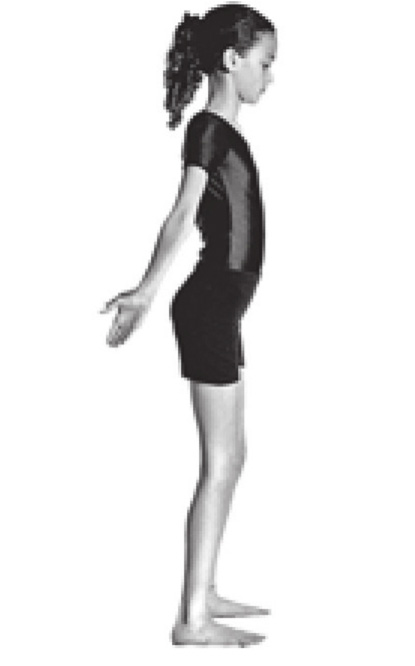
图2.36 手臂必须往外旋,才能增加外展的幅度
正常的肩胛骨功能运动,会影响到所有与之连接的结构,使手臂、肩膀、胸部与脊柱之间的动作均产生连带关系。
图2.37所示的连锁反应便是其中一个例子。手臂在内旋时,会使肩胛骨往前突,并让躯干弯曲与旋转。同样地,手臂往外旋的时候,会将肩胛骨往后推挤(缩回),使躯干反向旋转,当这个机制同时在身体的两边起作用时,手臂内旋的连锁反应将集中在矢状面,并且使躯干呈现驼背的姿势。
从人体运动学的观点来看,当胸椎有后突的情况时,肩胛骨会向前呈现前突的状态。但是,如之前所说的,不同的结构会相互影响。换句话说,当肩胛骨往后移动时(缩回),会使躯干挺直并减少脊柱后凸的幅度(Basmajian & Honecker,1989)(图2.38)。
总而言之,从人体运动学的观点来看,肩胛骨的位置会影响整体姿势,肩胛骨在活动度上的任何降低,都将危害到上述各个结构的最佳功能运动。因此,姿势治疗会特别将注意力放在改善肩胛骨的活动度上,且在许多病例中,姿势异常的特征之一,即为肩胛骨区域岀现功能性的僵硬问题。
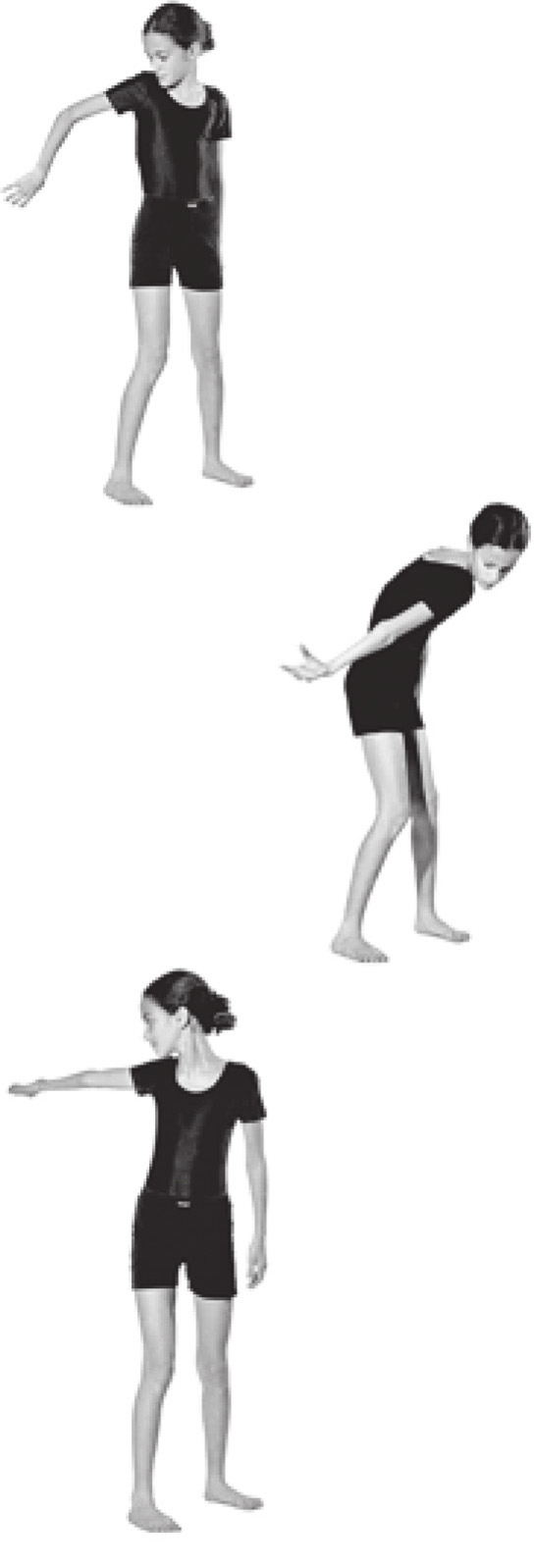
图2.37 四肢关节与躯干的相互关系

图2.38 肩胛骨位置对胸椎前突的影响
人类的神经系统可以让身体接收到感觉并对环境的改变作出反应,并且协调许多器官与四肢的活动。神经生理学家尝试去了解神经系统的协调方式,以挖掘不同现象之间的关联,并用化学和物理学的方法解决有神经缺陷或不健全的地方。本单元将着重在神经系统的功能层面来讨论神经系统如何控制姿势与动作模式,而不会谈到解剖学层面,即神经系统的结构与各个要素。
随着身体的正常发育,成熟的中枢神经系统可以让肌肉系统精确地执行动作,使特定动作由特定的肌肉来执行,并阻止其他肌肉出现不相关的活动。这种机制有助于完成各种复杂的动作,并且在协调能力正常的情况下,机制得以正常运作。如果这个机制出现问题,运动则不协调或相关联的动作受到影响。
相关联的动作是指伴随在主要的指令动作中出现,但和动作目标无关的动作。这类动作可在动态情况下看到,可以称为力量调节不当且无法区分动作时,所导致在能量上不经济的动作;这类动作也可在静态情况下发生,即在各种姿势位置时,肌肉张力过高。静态时肌肉张力过高,是导致各种姿势异常的主要原因之一,因为这会使身体不断地养成不良的姿势习惯。
评估中枢神经系统的结构是否成熟的方法之一,是观察有多少神经纤维被髓鞘包覆。神经纤维外层披覆的髓磷脂,可以让动作电位传达更快速也更精确。因此,神经纤维髓鞘化的程度一般被视为检测神经系统成熟度的标志(Yakovlev & Lencours,1967)。通常,多数髓鞘形成的过程会在出生后的两年到三年之间完成,但某些系统的髓鞘形成过程,甚至会延续至岀生后的前十年至二十年。其中包括连接大脑两半球知觉区的胼胝体。这些系统若延迟成熟,会出现动作协调障碍,并发展出姿势异常(Dennis,1976)。
这种情况发生时,管理高级神经中枢动作的脊髓与大脑,便会出现异常,引起刺激动作超过抑制动作的过程,造成动作不协调。
若假定脑皮质某区域负责控制身体的运动,抑制该区域功能则导致运动不协调,那么可假设我们可以通过学习来减少不协调情况。换句话说,适当的练习可大幅改善身体一般协调力,而好的协调能力又是改善姿势的先决条件。
在人体生长发育的每个时期,其动作模式都反映岀神经成熟度与环境要素之间的关系。如果想不断地增加神经协调动作的能力,并从中获得最大的益处,则必须减少既往习得的不良动作习惯带来的干扰。如果可以控制并纠正先前习得的不良动作模式,便能更轻松地学习新的动作反应,来对抗已有的旧习。
一般认为特定的动作模式,是由中枢神经系统的遗传结构来决定。而中枢神经系统在成熟的过程中,会形成抑制机制,来抑制、克服或同化这些特定的模式(Fuchs等,1995)。人们能否停止这些被同化的动作模式,或抑制并学习新的动作与姿势习惯,取决于神经的发育、认知能力以及适当的训练与练习。这些要素都能够帮助学习,让人更轻松快速地运用新的动作模式。
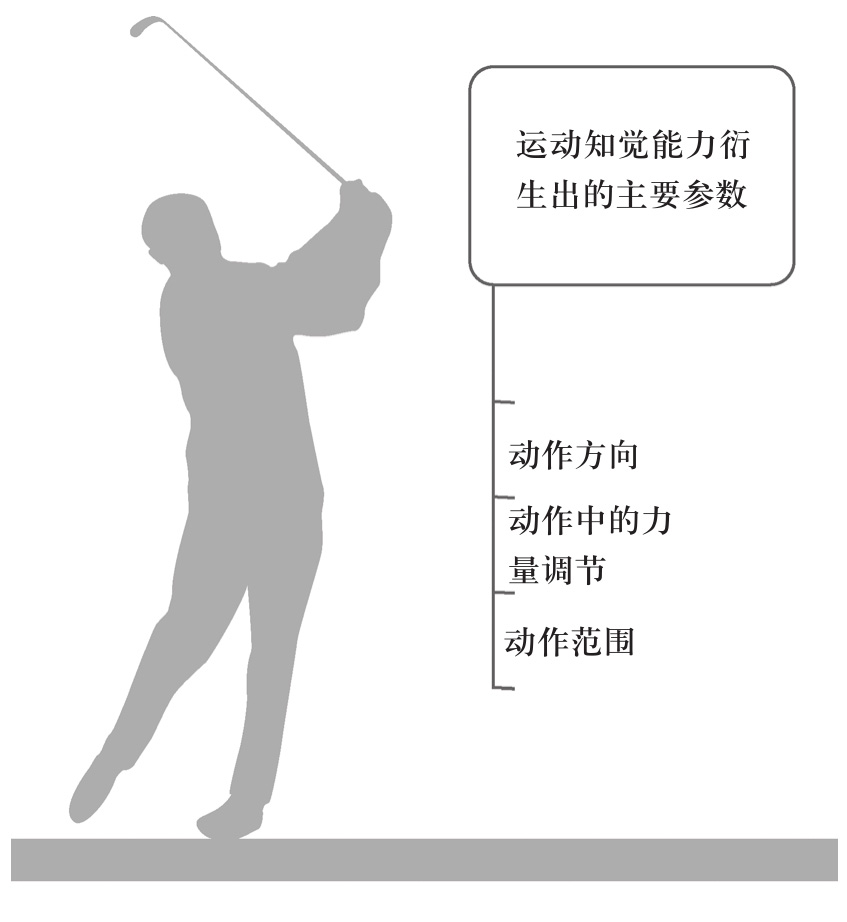
图2.39 运动知觉能力衍生出的主要参数
处理知觉信息的接收,是神经系统在控制动作与姿势模式时的一个重要功能。希腊文中运动感觉(kinesthesia)一词,由两部分组成:kine表示动作,esthesia表示感知或感觉的能力,合起来的意思是动作的感觉。薛灵顿(Sherington,1906)在他有关人体内皮下与内部感受器的研究结果中,强调神经生理学的层面。而本体感觉一词,常常被当作运动感觉的同义词。
运动感觉是一个知觉的系统,从肌肉与关节的感受器开始,延伸至小脑以及大脑皮质的运动感觉区(Swarts,1978;Spiduso,1978)。有些人将运动感觉视为一种感官,而每个个体可通过这个感官来感觉整个身体、四肢与肌肉收缩的强度。
运动感觉可以通过许多硏究方法切入,也有许多的定义。但这个领域的专家学者一致认为,运动感觉是在传递动作活动与四肢位置等特定类型的信息。因为,运动知觉处理能力本身就是极为重要的能力,能够让人在静态与动态中维持正常的姿势。
产生动作感觉的主要要素,来自于关节内3种类型的感受器(关节感受器):
1. 高尔基感受器——位于包裹关节的韧带中,以及连接肌肉与骨头的肌腱中。这些感受器负责提供关于关节位置与动作方向等信息。
2. 路菲尼感受器——位于关节的关节囊内,主要分布在结缔组织中。这类感受器对于动作的方向与速度极为敏感。路菲尼感受器会受肌肉张力影响,因此当动作在对抗阻力时,感受器也会开始运动。
3. 巴氏(巴齐尼)感受器——亦位于关节囊内,这个感受器对关节方向或与角度无关的快速动作极为灵敏。巴氏感受器会因肢体动作的速度、加速度与方向而启动功能。
上述位于肌纤维内的感受器(肌梭)之间的功能整合运动,可以帮助维持调整好的姿势,并且能在没有任何视觉反馈的情况下,提供动作位置、范围、力度等信息(图2.39)。
运动感觉无疑是一个影响动作与姿势模式的重要能力。身体的觉察认知能力、动作监测、学习新动作与动作记忆,均依赖于运动感觉的信息。这也是大多数的运动知觉处理障碍会发展出姿势异常的原因。因为这些人无法感觉到他们各个身体部位的空间位置(第9章将会讨论在疗程中可处理的这几类问题)。