
下载掌阅APP,畅读海量书库
立即打开



作为一种可靠性分析方法,GO法是从事件树理论发展起来的,它以系统每个基本单元为基础,将可能发生的各种情况及系统中各部件的相互逻辑关系合并后集中到操作符上,使模型得到简化。 GO法通过对系统的分析来建立相应的模型,这个模型称为GO图,GO图用GO操作符来表示具体的部件(例如阀门,泵)或逻辑关系,用信号流来连接操作符,表示具体的物流(例如电流,液流)或者逻辑上的进程,GO图的连接逻辑采用正常工作路径,这就是以成功为导向的建模方法。所以,GO图可以很好地反映系统的原貌并表达系统各个部件之间的物理关系和逻辑关系。 GO图中的操作符遵循一定的算法,GO法将依据GO图,沿着信号流方向,按照每个操作符的算法来完成对系统的可靠性分析,进行可靠度或可用度的计算,进行故障查找或最小割集的分析,得到系统的多种可靠性指标。
GO法有以下特点:
a)用GO图直接模拟系统,GO图中的操作符和系统原理图中的部件几乎是一一对应的。
b)以任务成功为导向,可以直接进行系统可靠性分析。
c)操作符和信号流可以表示系统的多个状态,可用于有多状态的系统可靠性分析。
d)可以描述系统在各个时间点的状态,可用于有时序的系统可靠性分析。
e)可分析系统所有可能状态的事件的组合,分析系统的路集和割集。
GO法中的一些基本概念如下:
1)操作符
系统中的部件、元件或子系统可统称为单元。 GO法中的操作符代表单元功能和单元输入、输出信号之间的逻辑关系,有类型、数据和运算规则三种属性。其中,类型为操作符的主要属性,用来反映操作符所代表的单元功能和特征;数据和运算规则从属于类型的属性。不同类型的操作符表示不同的单元功能或单元间的逻辑关系,因此也就有规定的单元数据要求和规定的运算规则与之相对应。 GO法中已经定义了17种标准操作符,如图3-20所示。
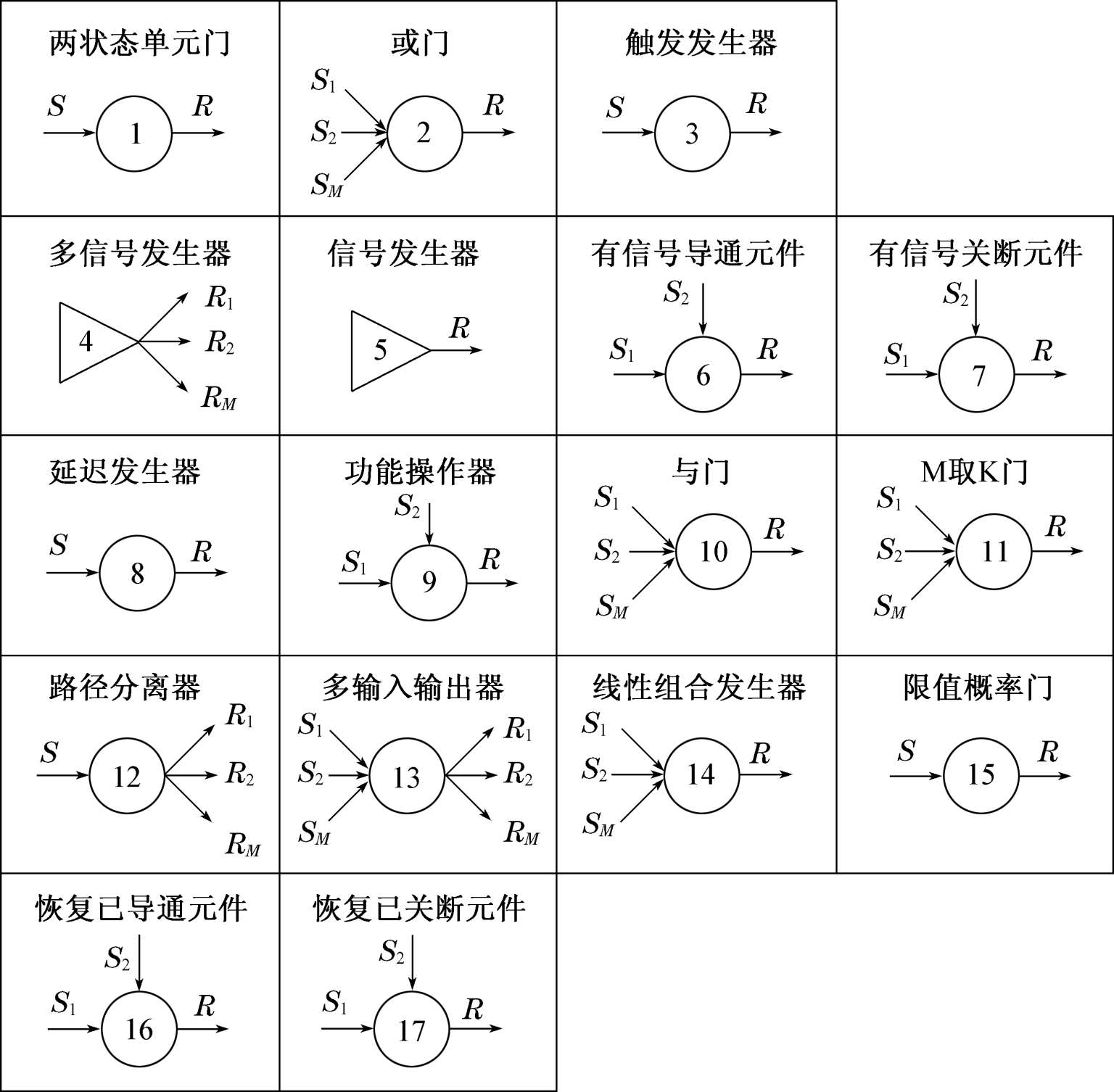
图3-20GO操作符类型
a)两状态单元:可用于模拟电子部件如报警器、放大器、电池、断路器、线圈、传感器等;机械部件如联轴器、减压器、安全阀、伸缩节、直管、过滤器等。两状态单元是最常用的操作符,可模拟两状态部件,即成功状态和故障状态。
b)或门:将多个信号用“或门”逻辑连在一起,得到输出信号。或门操作符是逻辑操作符,不需要概率数据。
c)触发发生器:可用于模拟继电器线圈、螺线管、激励传感器、加速度仪、马达、气动执行器件等。触发发生器操作符比类型1操作符更通用,可模拟3状态部件,即成功状态、故障状态和提前动作状态。
d)多信号发生器:可产生多个相关信号,作为GO模型的输入信号。
e)信号发生器:可产生一个起始信号,作为GO模型的输入,如发生器、电池、空气或水源等。此信号可用于代表环境影响,如温度、振动、光线和辐射等,也可以模拟人因对系统的影响。在一个模型中出现两个或多个第5类操作符时,他们表示的信号必须是相互独立的。
f)有信号而导通的元件:可用于模拟控制开关、电动阀、汽轮驱动泵和电机驱动泵等。第6类操作符表示这样一类经过激励后才能让输入通过的部件。
g)有信号而关断的元件:可以用于模拟这样一类部件,即在激励之前一直让输入通过,经过激励后结束了输入通过的部件,如常开阀和常闭触点等。
h)延迟发生器:可用于模拟部件的延迟响应,如操作员行为、机械延迟响应、电子系统延迟响应、计时器和时钟等。延迟的时间不是自然时间,而是根据系统的特性,人为确定的状态改变或者时间点的改变。
i)功能操作器:第9类操作符是逻辑门,他将两个输入信号结合起来,而输出信号是用户定义的两个输入信号的函数,可用于模拟示差器等。
j)与门:将多个信号用“与门”逻辑连接在一起,得到输出信号。第10类操作符是逻辑操作符,不需要概率数据。
k) M取K门:用于模拟M中取K个信号的这种“表决门”逻辑关系,得到输出信号。该操作符是逻辑操作符,不需要概率数据。
l)路径分离门:在输入信号到达后,第12类操作符可以选择某一条路径作为它的输出,其他路径将被关闭,可用于模拟多项接头开关等。该操作符的输出信号具有互不相容性。
m)多路输入输出器:第13类操作符是多输入、多输出的逻辑结构,可用于模拟需要多个输入和输出的部件。从理论上讲,所有操作符的功能都可以用第13类操作符等效代替,但是由于该操作符的输入方式很复杂,所以只用于少数情况。
n)线性组合发生器:该操作符是一种逻辑结构,其输出值是输入值的线性组合,可用于模拟逻辑运算器等。
o)限值概率门:可用于模拟这样一类设备,该设备根据自己的输入情况控制自己的输出情况,如模拟控制旁路或报警装置的控制器等,该操作符也可以作为“非门”来使用。
p)要求恢复已导通元件:可用于模拟这样一类部件,即该部件已经被激励,目的是终止输入信号向输出方向的流动,如对已经被激励的继电器解除激励,终止电流流过触点,关闭已经打开的电磁气动阀,停止液体的流动或对某些警报系统部件断电等。该类操作符仅仅应用于部件的成功状态被定义为解除部件的激励后,它的输出同时停止的情况。
q)要求恢复已关断元件:可用于模拟这样一类部件,即该部件已经被激励,目的是使输入信号向输出方向的流动,如对已经被激励的常闭电磁阀解除激励,让气体流过。该类操作符输入和输出的状态逻辑是相反的,应用时可以同时加上第15类操作符模拟这种逻辑反向,使系统模型的所有成功状态都用相同的状态值表示。
2)信号流
GO法用信号流代表单元的输入和输出以及单元间的关联,用信号流连接操作符生成GO图。信号流的属性是状态值和状态概率。当GO法用于可修系统时,信号流含有可修复系统的可靠性参数,当信号流的状态值 i =0,1,2,…, N 代表一系列给定的具体时间值时,信号流的参数是时间函数,记为 P S ( i )、λ S ( i )和 μ S ( i )。当对工程可修系统进行稳态可靠性分析时,故障率和维修率是常数,即λ S ( i )=λ, μ S ( i )= μ ,可用 P s (1)和 P s (2)分别表示信号流正常工作的状态概率和故障维修的状态概率。
3) GO图
GO图是经过系统分析,按一定的规则直接把系统原理图、流程图和工程图“翻译”成的图形,它有操作符和信号流连接组成。在建立GO图时应符合以下规则:
a) GO图中的每个操作符必须标明其编号和类型号,且编号唯一。
b) GO图中的每个信号流必须标明其编号,且编号唯一。
c) GO图中至少需要一个输入型操作符(类型4或5),通常对操作符进行编号时从输入操作符开始。
d) GO图中的每个操作符的输入信号必须是另外一个操作符的输出信号。
e) GO图中信号流从输入操作符开始应通到代表系统输出的信号流,形成信号流序列,不允许有循环。通常对信号流进行编号时,从输入操作符的输出信号开始,操作符的编号和其输出信号流的编号相同。
4) GO运算
GO法建立好GO图后,首先输入每个操作符的可靠性数据,然后再进行GO运算。从输入操作符输出信号开始,按照下一操作符的运算规则来运算,得到此输出信号的概率和状态,沿着信号流的方向逐个对操作符进行运算,直到系统的某一组输出信号,这一过程被称为GO运算,其可分为定性运算和定量运算。对定性运算,就是按照操作符的运算规则,逐个去分析单元状态和输入信号状态的组合,从而得到输出信号的状态,最后求得代表系统输出信号的状态,分析系统各状态的每个可能的单元状态组合,求出割集和路集。对定量运算,在对所有操作符输入信号的状态和单元组合的状态进行分析得到输出信号状态的同时,可计算出输出信号的状态概率,沿着信号流的方向逐步计算可求得代表系统输出信号的状态概率。
GO法应用于可修系统时,操作符代表系统的可修单元。而系统单元与单元之间,单元和系统之间不是完全独立的,在停工、维修、冗余、备用等方面有一定的相关性,其相依关系定义如下:
a)停工相依:系统由于某单元故障而停工时,没有故障的单元随系统的停工而停止运行,并且不再发生故障,直到系统修复,单元再恢复正常运行。
b)维修相依:系统中同时处于故障状态的单元数多于允许同时维修的故障单元数(简称维修工数)时,多出的故障单元要等待其他单元修复后才能维修。
c)冗余相依:系统中的并联单元数多于系统工作要求的单元数,多出的单元发生故障时,系统仍能正常工作。
d)备用相依:有冗余的并联单元系统中冗余的单元处于备用状态,当正在运行的单元发生故障时,冗余备用的单元开始运行,保证系统继续正常工作,并假定冗余单元处于备用状态时不会发生故障。
可修系统的操作符代表的单元是可修系统,只有成功状态和故障状态。稳态时,操作符成功状态的概率就是单元的可用度,操作符故障状态的概率就是单元的不可用度,操作符的故障率和维修率就是可修单元的故障率和维修率。
以含一个共有信号的电力系统为例,建立其GO图如图3-21所示。图中,后一位数字表示操作符编号;连接线上的数字表示信号流编号。可见图中共有4种不同形式的操作符,
分别为“两状态单元”(类型1)、“或门”(类型2)、“信号发生器”(类型5)和“有信号而导通的元件”(类型6)。以
P
Si
表示状态值为
i
的信号流成功的概率,以
P
Ri
表示状态值为
i
的操作符成功的概率。根据图可以对各部分状态概率进行定量计算,得到系统的成功概率为:

 。
。
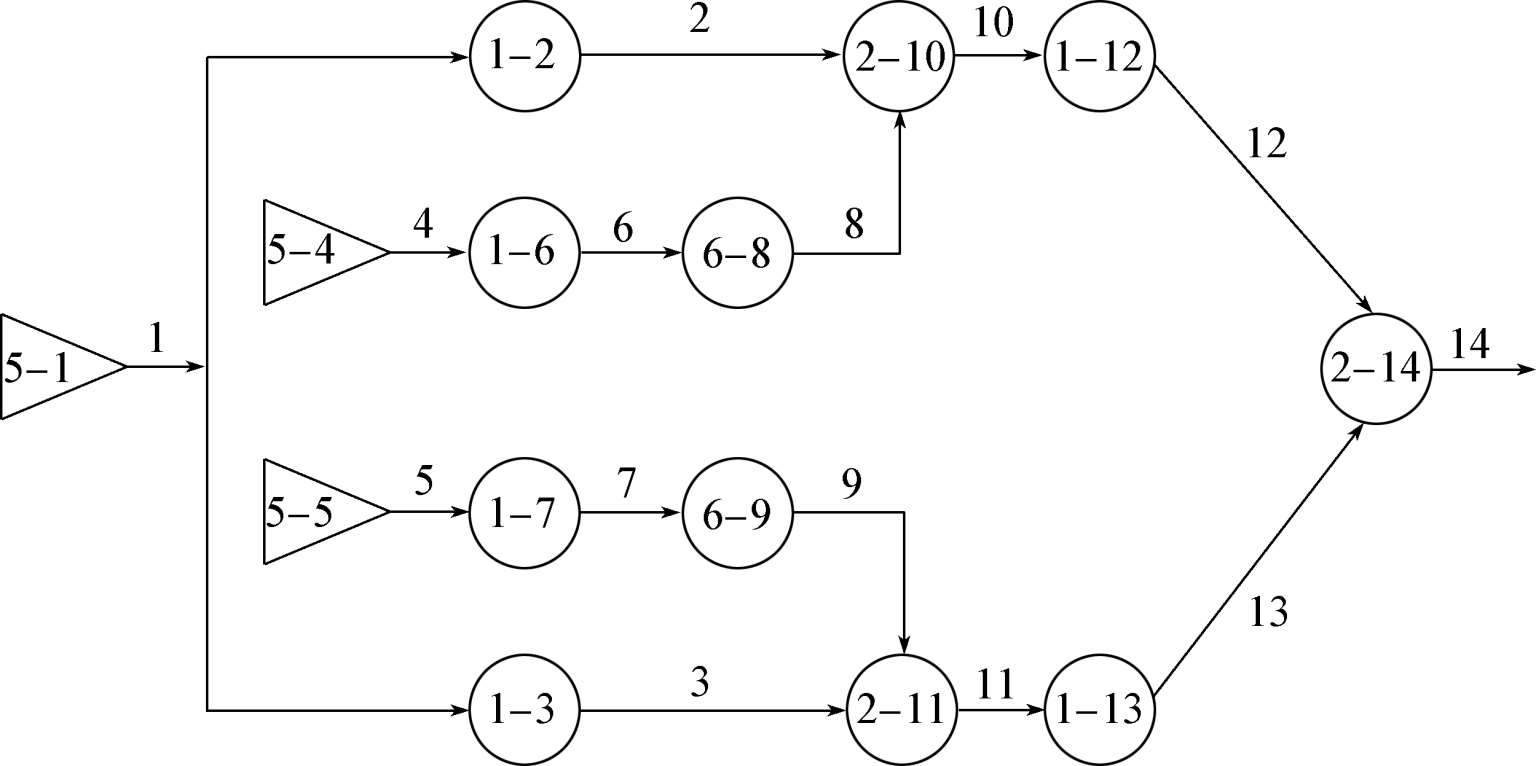
图3-21某共有信号电力系统GO图
由于系统中只含有一个共有信号,因此系统状态概率方程将含有共有信号的2次项;当系统存在多个共有信号时,将出现共有信号的高次项。修正时采用一次项代替高次项,对方程进行简化,同时修正了共有信号项,得到正确的表达式,即:
 。
。
当系统存在多个共有信号时,系数计算复杂,一般采用编程方式进行处理以快速得到计算结果。
5)小结
a)方法原理
GO法是一种以成功为导向的系统概率分析技术,它的基本思想是把系统图或工程图直接翻译成GO图。 GO图中用操作符代表具体的部件或者代表逻辑关系,用信号流连接操作符,代表具体的物流或者代表逻辑上的进程。主要步骤就是建立GO图和进行GO运算,而GO图和GO运算的二大要素就是操作符(operator)和信号流( signal),通过两大要素可以建立GO法模型并进行可靠性计算。
b)建模方法
系统中的元件、部件统称为单元,GO法中用操作符来代表单元。操作符的属性有类型、数据和运算规则。类型(Type)是操作符的主要属性,操作符类型反映了操作符所代表的单元功能和特征。
信号流表示系统单元的输入和输出信号以及单元之间的关联。信号流连接GO操作符生成GO图。信号流的属性是状态值和状态概率。用0,1,2,…, N 整数状态值代表 N + 1个状态。状态值 u 代表一种提前状态。如过早发出的信号,信号来到前发生的动作等。状态值1,2,…, N -1表示多种成功状态。最大的状态值 N 表示故障状态。相应状态值的概率之和为1。
GO图建立后,输入所有操作符的数据,从GO图的输入操作符的输出信号开始,根据下一个操作符的运算规则进行运算,得到其输出信号的状态和概率,按信号流序列逐个进行运算直至系统的一组输出信号,这就是GO运算。定性运算分析系统各状态的所有可能的单元状态的组合,求出路集和割集。定量运算计算所有输出信号的状态概率。
c)计算方法
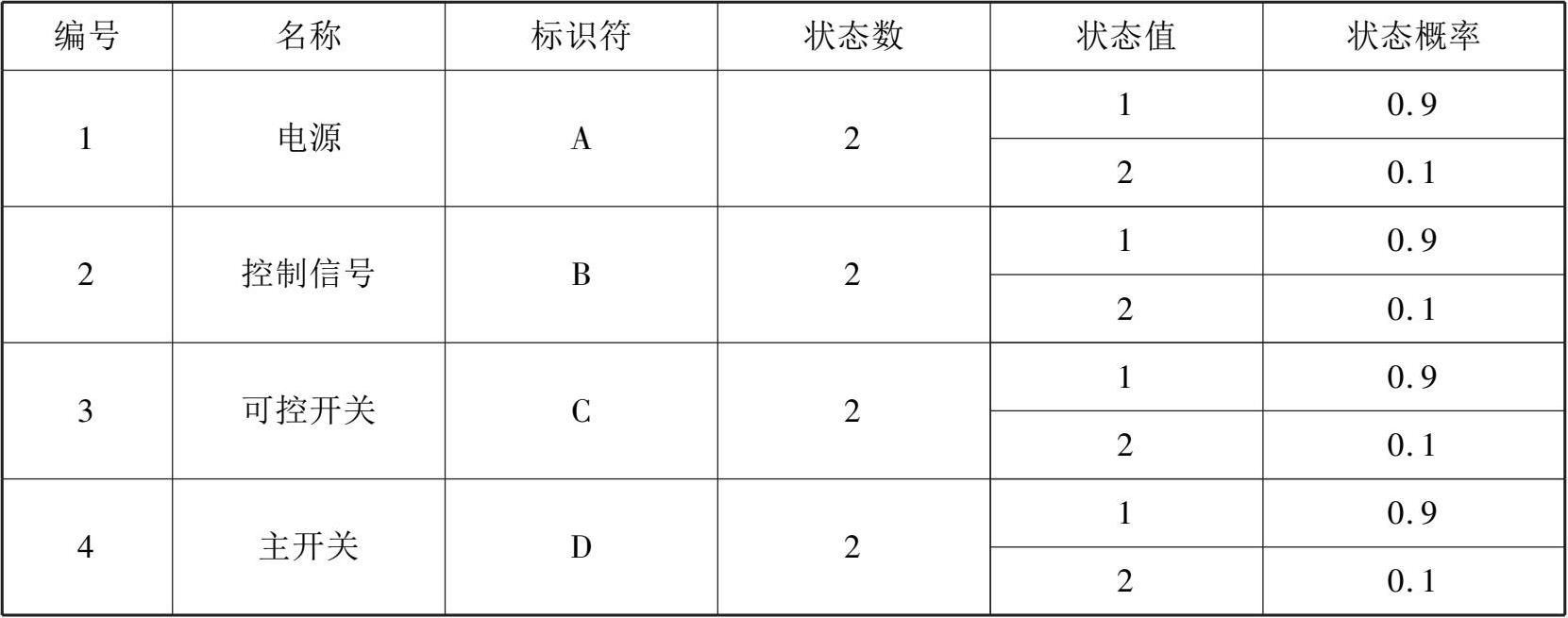
[例3-2] 图3-22是某电源系统的系统结构,以及用GO图表示的系统模型。(图3-23)。假设静态系统状态(状态1为成功,2为故障)和概率如表3-7:
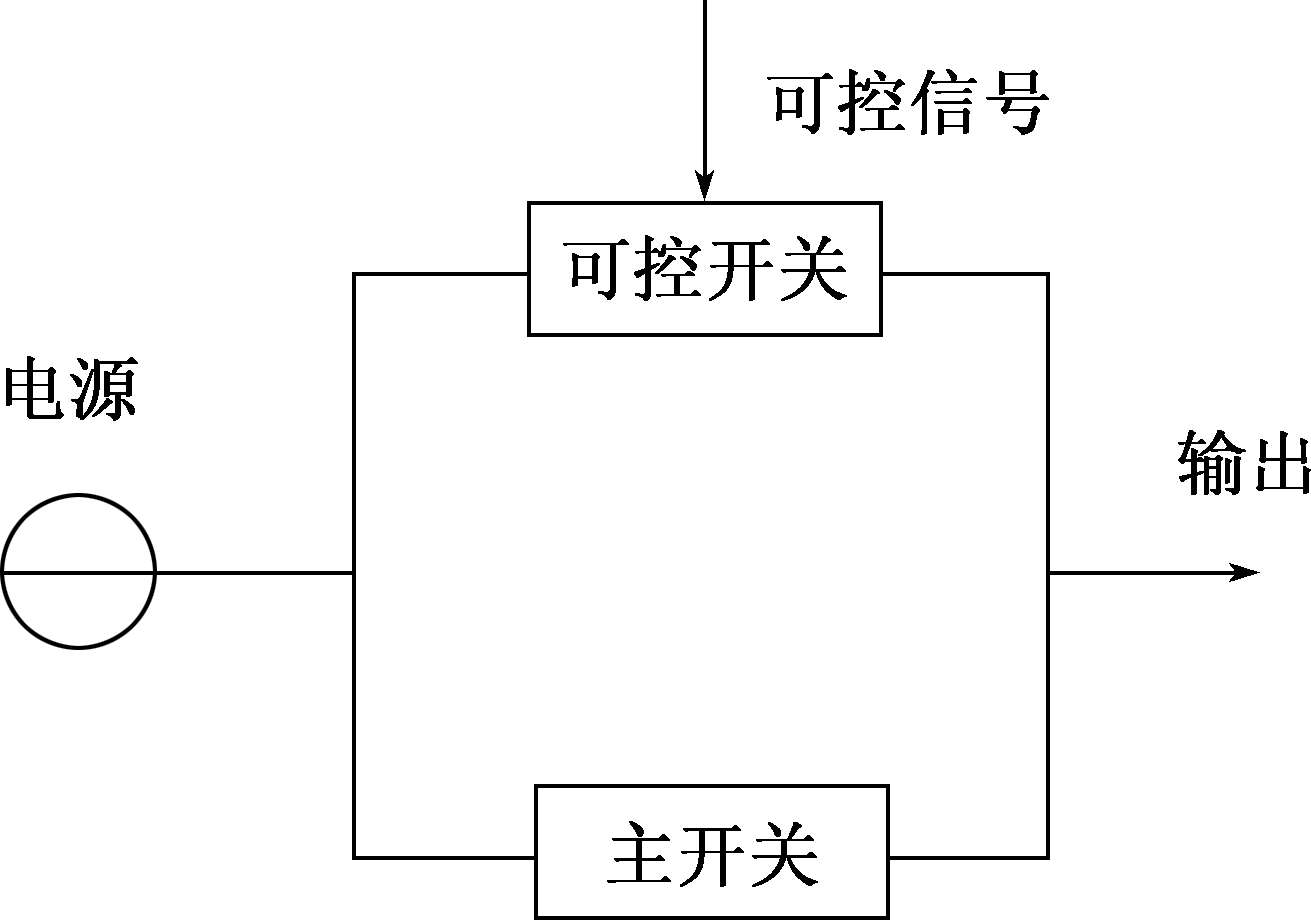
图3-22某电源系统
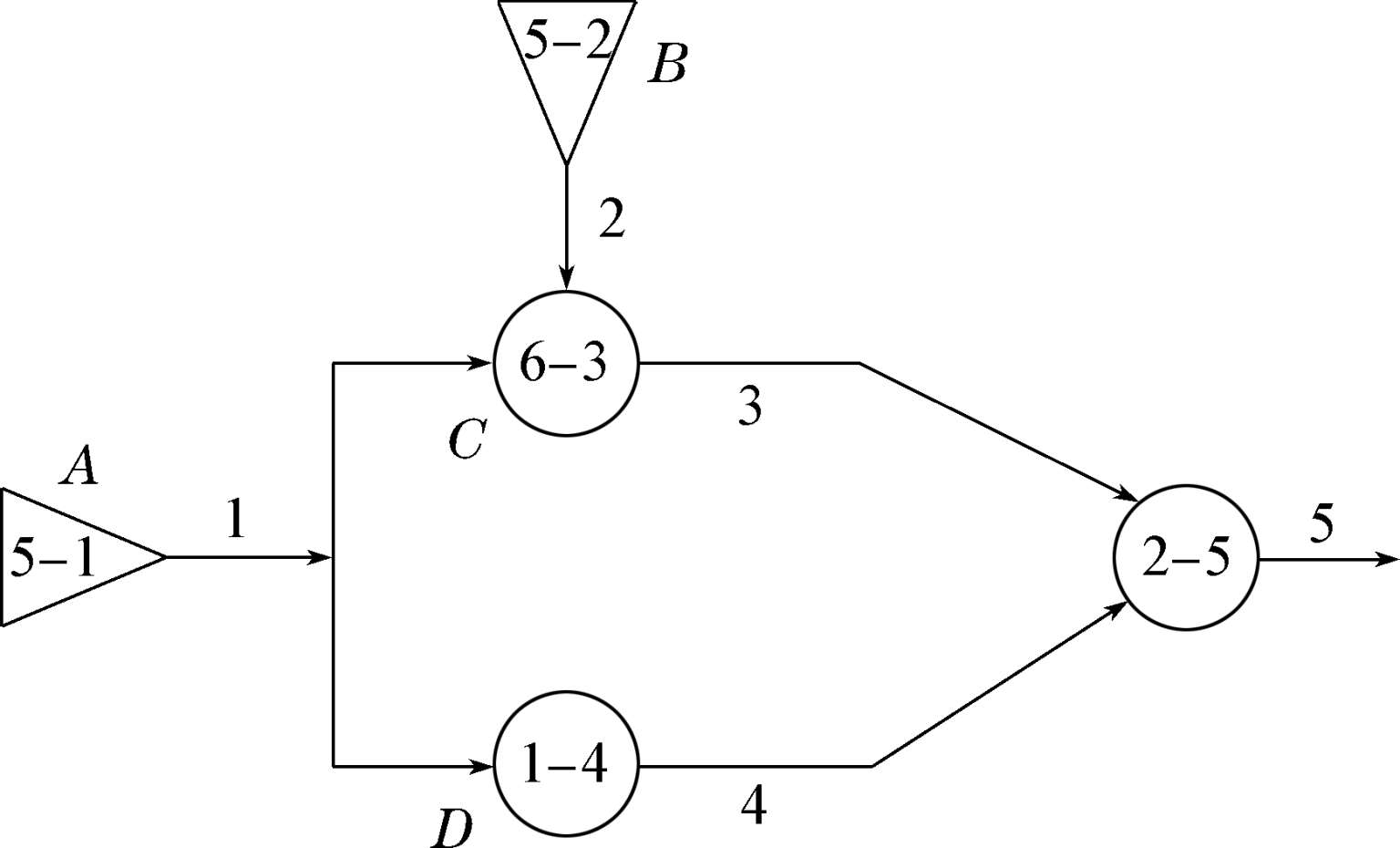
图3-23电源系统GO图
表3-7电源系统状态值和状态概率
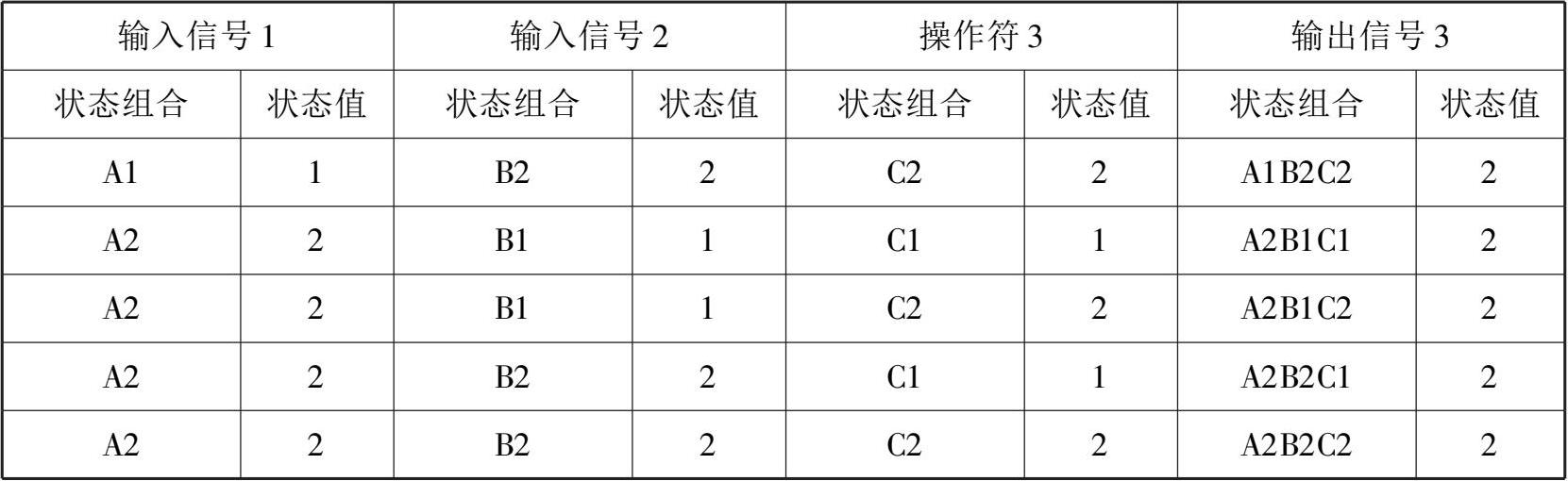
运用GO法分析各操作符的状态。例如对操作符3进行分析,操作符3为类型6的操作符,结果如表3-8。
表3-8电源系统操作符3状态分析

(续表)
以此类推各个操作符的状态,最终可以得到电源开关系统的定性分析结果。如表3-9所示。
表3-9电源系统最终输出状态组合
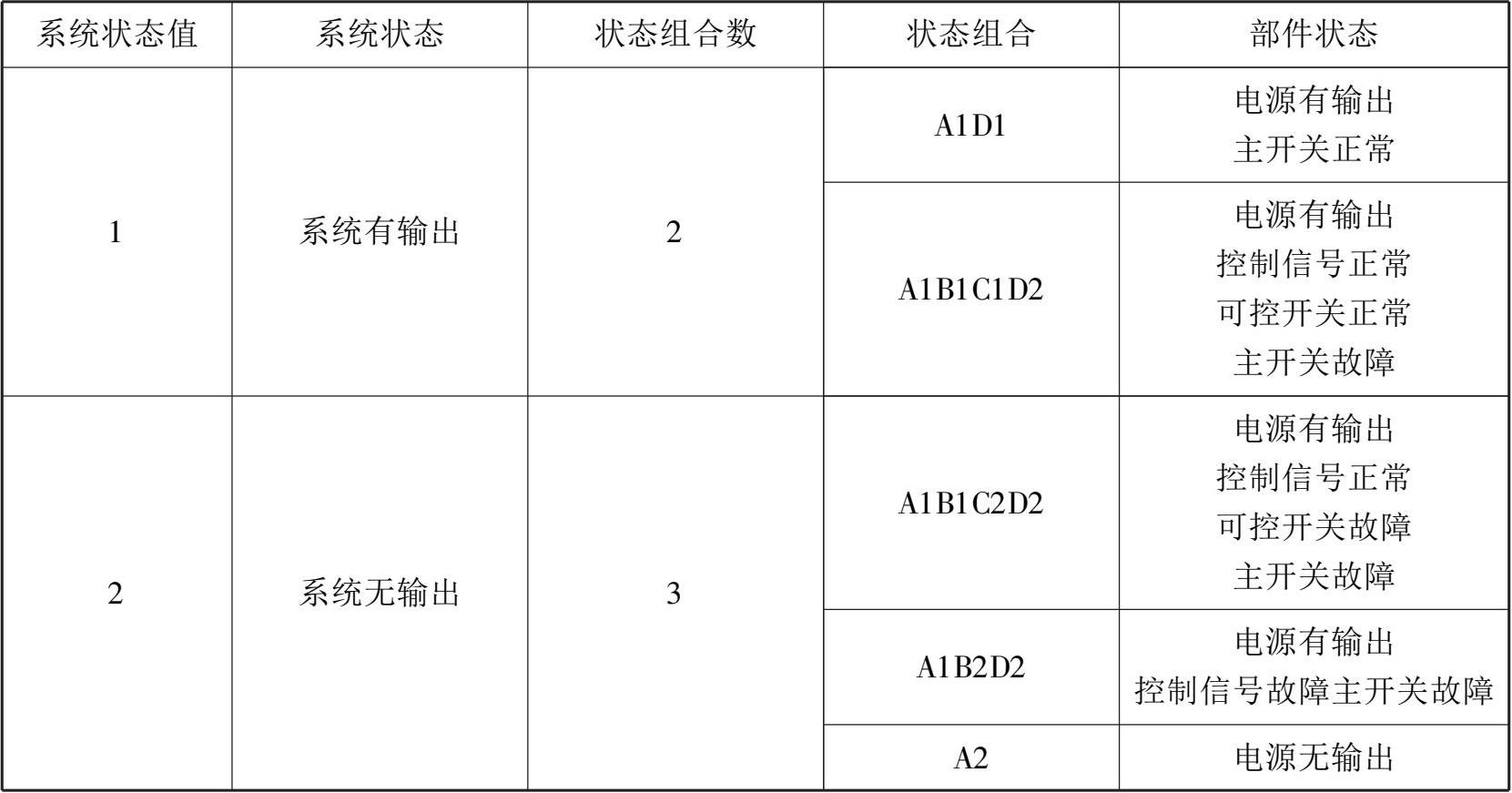
根据最终系统状态和相对应的状态组合情况,我们便可以通过进一步分析最小路集和最小割集,确定系统的状态和对应事件组合。
系统实际运作过程中,我们得到的并非是静态概率,而是会存在每个状态间动态转移概率。在这种情况下,若系统的组件遵循指数分布失效规律,我们可以通过马尔科夫状态转移对系统进一步进行建模分析,根据静态状态的割集和路集等信息,确定出系统在各个状态下运行的概率等可靠性参数。若系统的组件失效是非指数的失效规律,则需要通过时变马尔科夫等方法进行求解,在多级数的展开过程中会让计算较为复杂。
d)适用范围
GO法可以有效提供系统可靠性的精确定量化信息,可以帮助进行系统可靠性评价,对于有时序的任务,可以用来确定系统最佳的运行方式。另外,GO法可以分析导致系统成功和失效的组件事件的集合,用于确定系统的最优配置方式,提供最高的系统运行可靠性。对于关键组件的评价,GO法同样能够确定组件对故障的影响程度,鉴别系统中的关键设备,确立组件的优先级,建立更合理的维修检修体系。
GO法与故障树方法两者之间有很多特性和适用性差异。 GO法是一种成功导向方法,运用归纳法推导出原理图;故障树方法是以故障为导向,通过演绎法对系统以分层次逻辑图进行分析。 GO法更加适用于多状态有时序的方阵模拟和隐性故障分析,而故障树更适合两状态的显示故障分析。