
下载掌阅APP,畅读海量书库
立即打开



PID控制又称比例微积分控制,是一种闭环控制。下面以图3-10所示的恒压供水系统为例来说明PID控制原理。
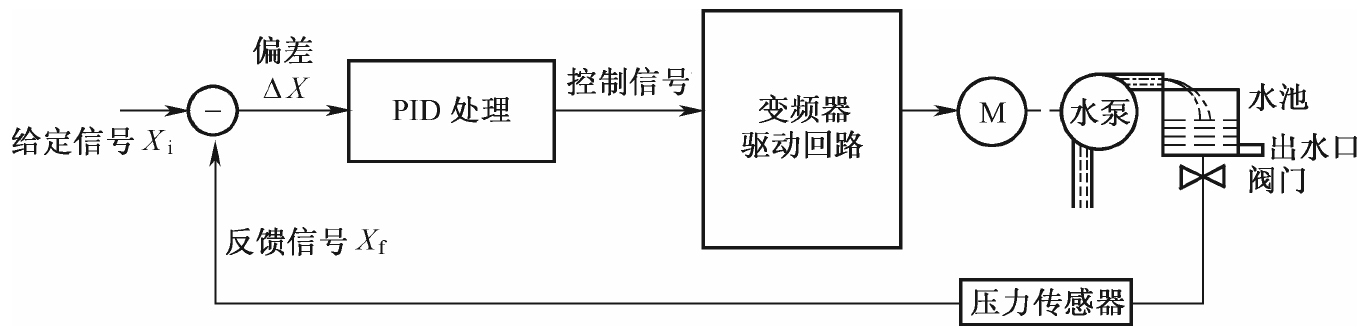
图3-10 恒压供水系统
电动机驱动水泵将水抽入水池,水池中的水除经出水口提供用水外,还经阀门送到压力传感器,传感器将水压大小转换成相应的电信号 X f , X f 反馈到比较器与给定信号 X i 进行比较,得到偏差信号Δ X (Δ X = X i − X f )。
若Δ X >0,表明水压小于给定值,偏差信号经PID处理得到控制信号,控制变频器驱动回路,使之输出频率上升,电动机转速加快,水泵抽水量增多,水压增大。
若Δ X <0,表明水压大于给定值,偏差信号经PID处理得到控制信号,控制变频器驱动回路,使之输出频率下降,电动机转速变慢,水泵抽水量减少,水压下降。
若Δ X =0,表明水压等于给定值,偏差信号经PID处理得到控制信号,控制变频器驱动回路,使之输出频率不变,电动机转速不变,水泵抽水量不变,水压不变。
控制回路的滞后性会使水压值总与给定值有偏差。例如,当用水量增多水压下降时,电路需要对有关信号进行处理,再控制电动机转速变快,提高水泵抽水量,从压力传感器检测到水压下降到控制电动机转速加快,提高抽水量,恢复水压需要一定时间。通过提高电动机转速恢复水压后,系统又要将电动机转速调回正常值,这也需要一定时间,在这段回调时间内水泵抽水量会偏多,导致水压又增大,又需进行反调。这样的结果是水池水压会在给定值上下波动(振荡),即水压不稳定。
采用PID处理可以有效减小控制环路滞后和过调问题(无法彻底消除)。PID包括P(比例)处理、I(积分)处理和D(微分)处理。P处理是将偏差信号Δ X 按比例放大,提高控制的灵敏度;I处理是对偏差信号进行积分处理,缓解P处理比例放大量过大引起的超调和振荡;D处理是对偏差信号进行微分处理,以提高控制的迅速性。
为了让PID控制达到理想效果,需要对PID控制参数进行设置。PID控制参数说明如表3-5所示。
表3-5 PID控制参数说明
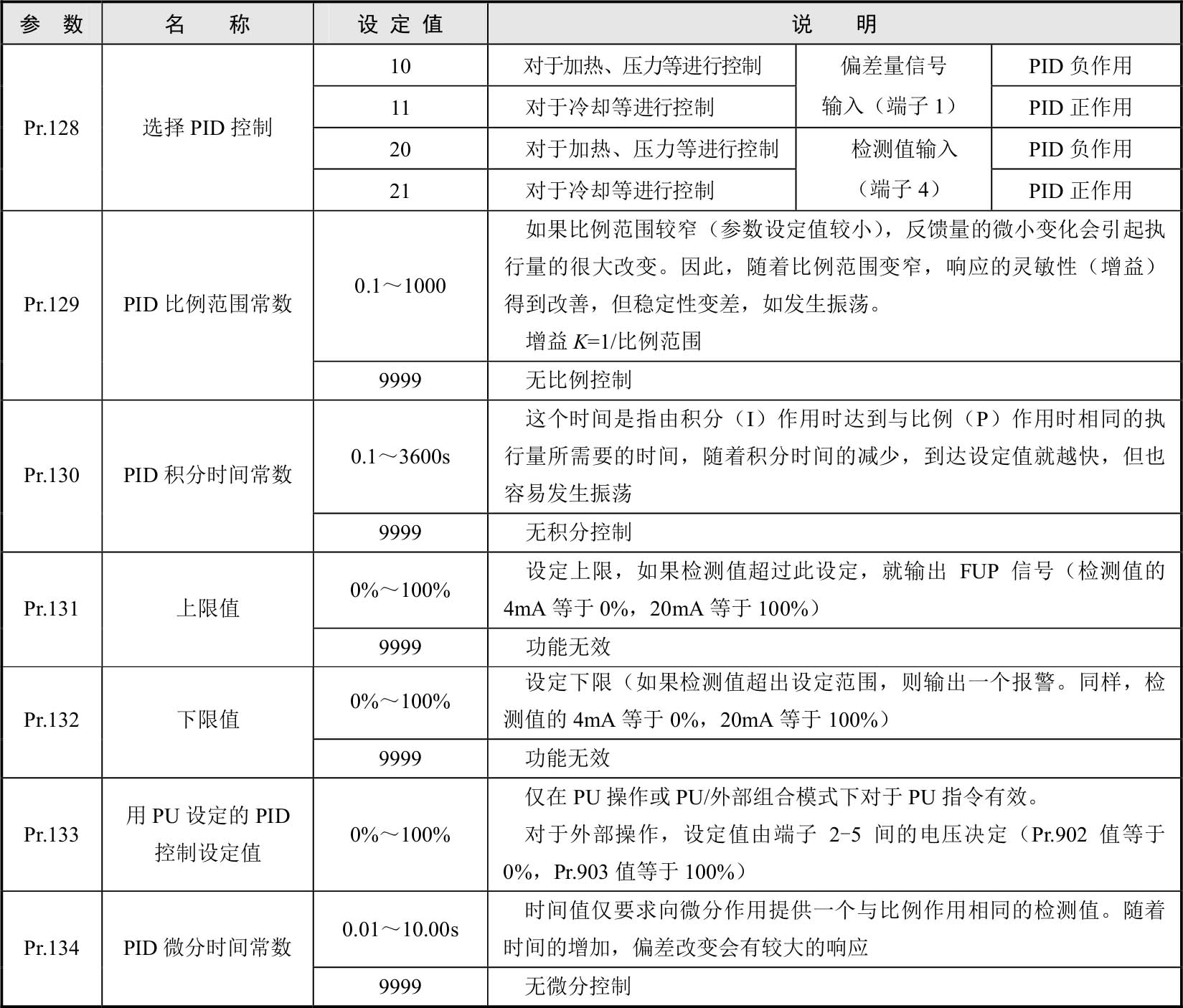
图3-11所示是一种典型的PID控制应用电路。在进行PID控制时,先要接好线路,然后设置PID控制参数,再设置端子功能参数,最后操作运行。
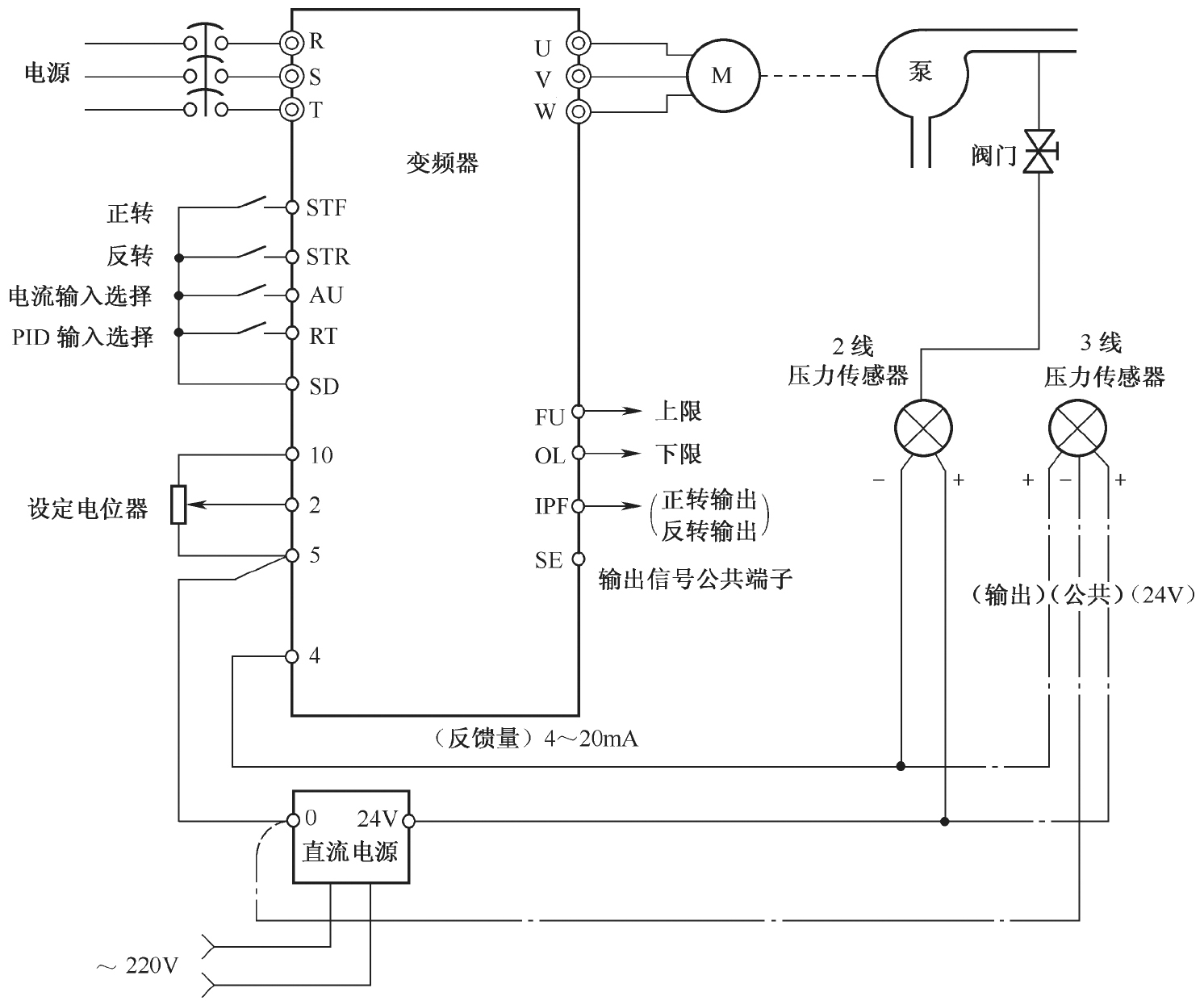
图3-11 一种典型的PID控制应用电路
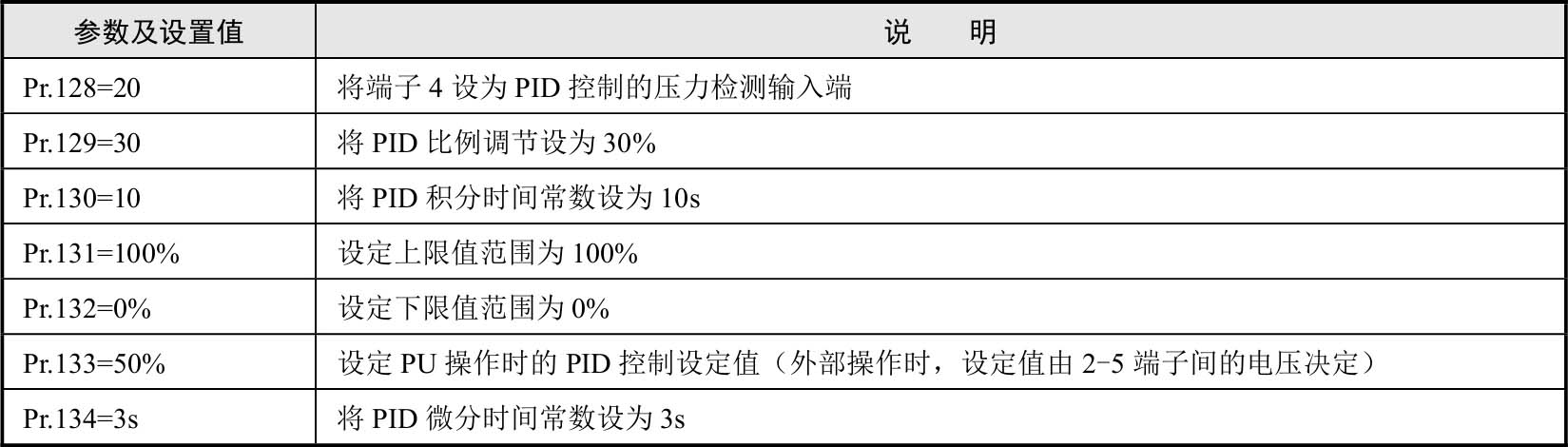
图3-11所示电路的PID控制参数设置如表3-6所示。
表3-6 PID控制参数设置
PID控制时需要通过设置有关参数定义某些端子功能。端子功能参数设置如表3-7所示。
表3-7 端子功能参数设置

① 设置外部操作模式。设定Pr.79=2,面板上的“EXT”指示灯亮,指示当前为外部操作模式。
② 启动PID控制。将AU端子外接开关闭合,选择端子4电流输入有效;将RT端子外接开关闭合,启动PID控制;将STF端子外接开关闭合,启动电动机正转。
③ 改变给定值。调节设定电位器,2-5端子间的电压变化,PID控制的给定值随之变化,电动机转速会发生变化。例如,给定值大,正向偏差(Δ X >0)增大,相当于反馈值减小,PID控制使电动机转速变快,水压增大,端子4的反馈值增大,偏差慢慢减小,当偏差接近0时,电动机转速保持稳定。
④ 改变反馈值。调节阀门,改变水压大小来调节端子4输入的电流(反馈值),PID控制的反馈值变化,电动机转速就会发生变化。例如,阀门调大,水压增大,反馈值大,负向偏差(Δ X <0)增大,相当于给定值减小,PID控制使电动机转速变慢,水压减小,端子4的反馈值减小,偏差慢慢减小,当偏差接近0时,电动机转速保持稳定。
⑤ PU操作模式下的PID控制。设定Pr.79=1,面板上的“PU”指示灯亮,指示当前为PU操作模式。按“FWD”键或“REV”键,启动PID控制,运行在Pr.133设定值上,按“STOP”键停止PID运行。