
下载掌阅APP,畅读海量书库
立即打开




车模行驶过程中的速度控制一般都采用闭环控制,闭环控制需要实时检测车模的行驶速度,常用的测速传感器有光电编码盘和编码器,实物如图2.33所示。光电编码盘价格便宜,但是安装麻烦且容易受外部光线和灰尘的影响,测量精度不高。编码器测量原理与光电编码盘相同,但精度高、稳定性好,当然价格上也贵很多。从竞赛车模来看,绝大多数都选择光电编码器作为测速传感器。

图2.33 智能汽车常用测速传感器
按照工作原理,编码器可以分为增量式和绝对式两类。增量式编码器是将位移转换为周期性的电信号,再把这个电信号转换为可计数的脉冲信号,用脉冲的个数表示位移的大小。绝对式编码器的每一个位置对应一个确定的数字码,因此它的示值只与测量的起始和终止位置有关,而与测量的中间过程无关,智能汽车竞赛一般都选用增量式编码器。
AB相增量式编码器内部结构如图2.34所示,编码盘结构如图2.35所示,在输出方式上分为电压输出和集电极开路输出两种方式,其中集电极开路输出在采集脉冲时需要加一个上拉电阻,同时编码器还有一个Z相信号,即编码器机械零位信号,每当编码器转到机械零位,Z相输出一个脉冲,可用于矫正脉冲长时间的积分误差。AB项增量式正交编码器输出分为两种,一种是AB项都输出脉冲信号。如果正转,A相输出超前B相 90°,如果反转,A相滞后B相 90°,如图2.36所示;另一种是A项输出脉冲信号,B项输出方向信号,如图2.37所示。对于AB项脉冲输出来说,如果只是采集A相或B相的脉冲数,只能测量转速的大小,而不能判断旋转的方向。正交解码则能解决这个问题。
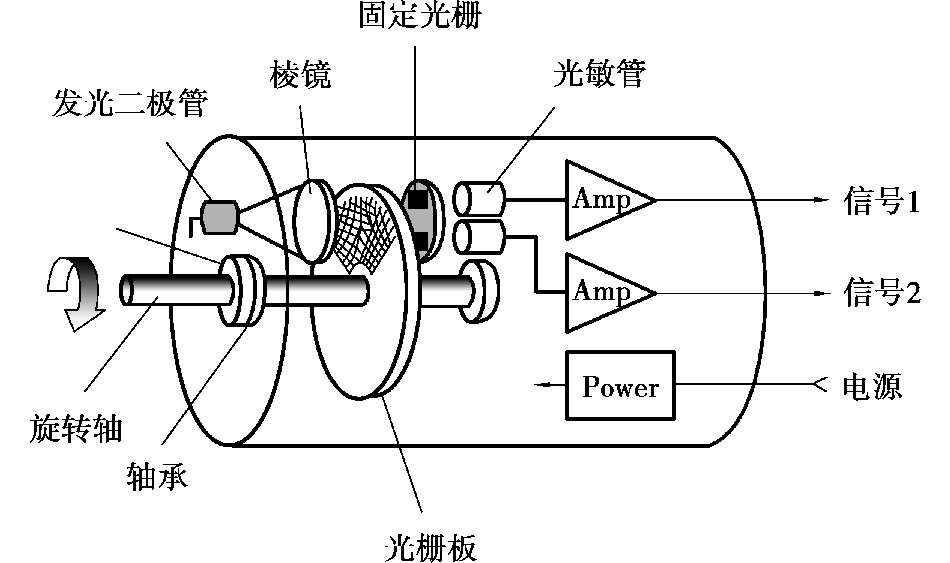
图2.34 光电编码器内部结构
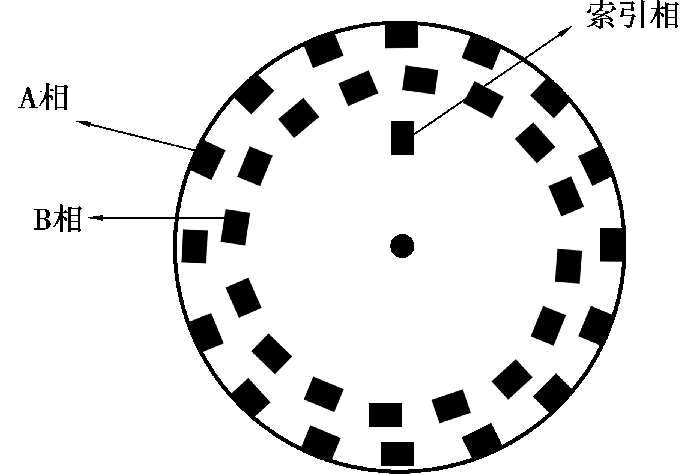
图2.35 增量式正交编码盘示意图
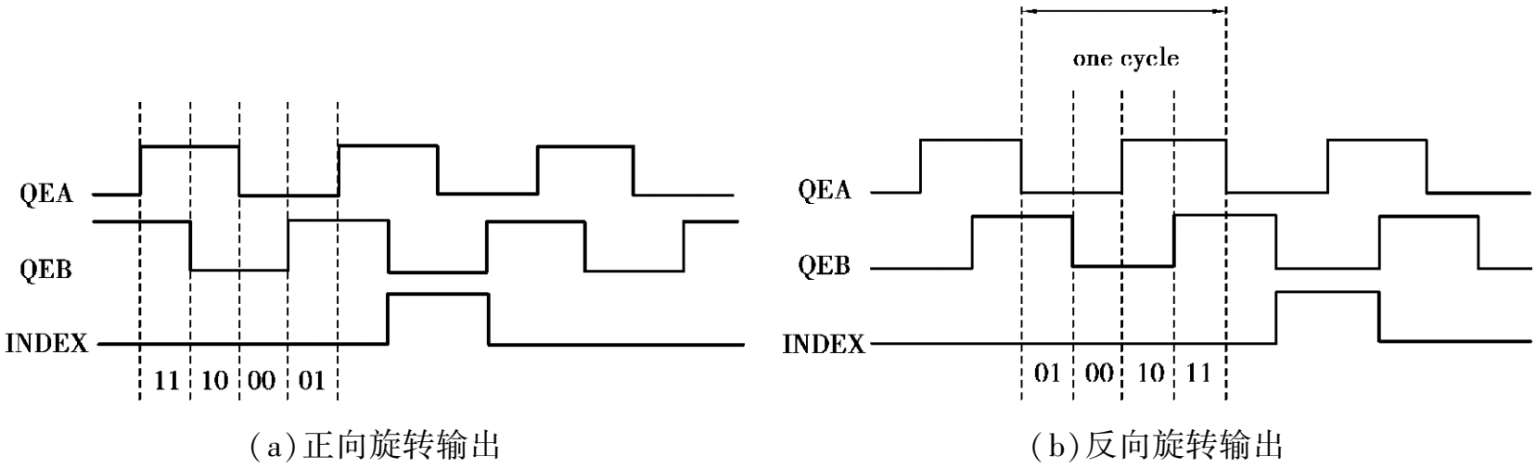
图2.36 AB项输出脉冲信号
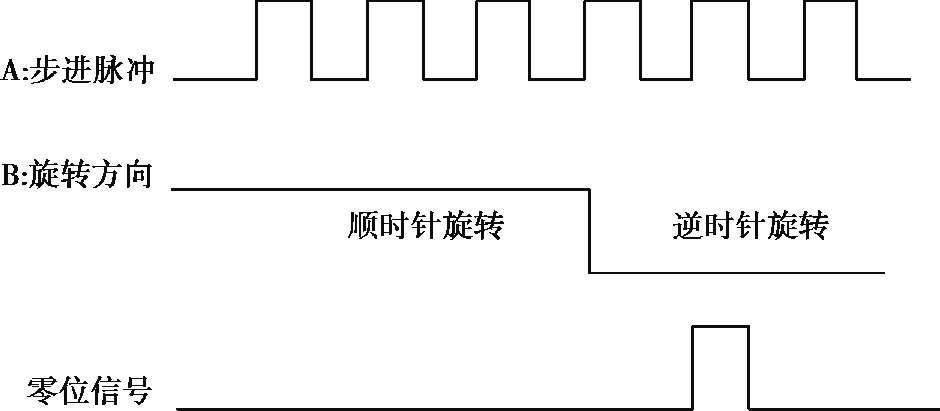
图2.37 A项输出脉冲、B项输出方向