
下载掌阅APP,畅读海量书库
立即打开



高分辨率遥感图像特定目标分割问题的实质是构建遥感图像空间到目标空间的映射关系,如图1-4所示。
图1-4 遥感图像分割的空间映射本质
根据遥感图像的成像原理,遥感图像空间可表示为

其中, x 表示像素灰度信息,若为可见图像灰度值, x =[0,255]; h 表示遥感图像高方向的变量, h ={1,2,…, H }, H 表示遥感图像的高; w 表示遥感图像宽方向的变量, w ={1,2,…, W }, W 表示遥感图像的宽; c 表示遥感图像信息通道的变量, c ={1,2,…, C }, C 表示遥感图像的信息通道数,RGB遥感图像的信息通道数为3。
特定目标分割结果表示为:

其中, y 表示目标分类编码,不同的编码方式, y 的取值不一样。如直观的编码方式 y ={1,2,…, L }, L 为目标分类总数。若采用one-hot编码且 x h , w 属于第 l 类目标,则 y h , w =[0,0,…0,1,0,…0],其中第 l 个元素为1,其余元素为0。
由于直接从遥感图像空间建立该映射模型十分困难,因此传统的方法是在遥感图像空间里提取目标对应的特征值,并构成特征空间,再构建从特征空间到目标空间的映射关系,具体如图1-5所示。
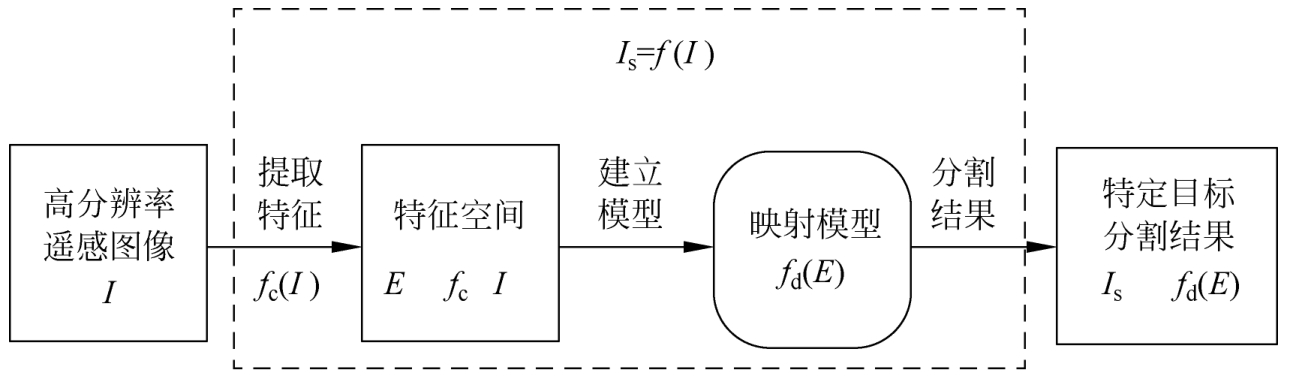
图1-5 特征提取与映射模型
设遥感图像的有限维特征空间为

其中, e 为特征值; m 表示特征通道数, m ={1,2,…, M }, M ∈R;( i , j )表示一个特征通道的特征点位置, i ∈{1,2,…, E h }, E h ∈R为特征通道的高, j ∈{1,2,…, E w }, E w ∈R为特征通道的宽。
根据图1-5,从图像空间到特征空间的映射关系表示为

特征空间到目标空间的映射关系可表示为

因此,传统的遥感图像的分割问题需要求解两个映射关系 f c (·)和 f d (·)。随着人工智能研究深入和技术的又一次暴发,采用深度神经网络完成遥感图像特定目标分割,已可以实现端对端(End-to-End)模式,即通过深度神经网络逼近图像空间到目标空间的直接映射关系

遥感图像的分辨率由低增高的过程也是地表信息更加丰富的过程,同样意味着同一目标在遥感图像中的表征信息更加丰富。这一方面表明能从更多的信息中获取该目标的特征,另一方面则要求分割算法更加复杂和精确。在图像分割中,目标与特征空间之间存在着某种非线性映射,而图像分割算法本质上即是建立该类映射的显性的非线性映射模型。高分辨率遥感图像目标分割面临的挑战性问题包括两个方面:
在低分辨率遥感图像中,表达目标的像素点个数较少,能够提取的特征量有限。而在高分辨率遥感图像中,同一目标的纹理、结构和光谱信息则丰富得多,可以用来表述目标的特征也十分繁杂。如对于统计性纹理特征而言,常用的灰度共生矩阵能提供协同性、反差性、方差、熵等多种表征目标纹理的特征值。除统计性纹理特征外,还存在模型性纹理特征、信号处理型纹理特征等多种表达形式,使得表征目标的特征空间维度大幅增加。由于目标特征空间维度的增加,除了给目标提取提供基础信息外,同时对于目标的关键性特征信息的选取也提出了巨大的挑战。目前,遥感图像特征低秩化是图像处理领域的研究热点和难点之一。因此,在高分辨率遥感图像分割中,如何选取合理的目标特征,去除冗余信息是遥感图像目标分割和提取的关键。
在遥感图像中,地物的复杂状况决定了目标描述的非线性程度。随着遥感图像分辨率的提高,地物的细节信息更加明显,用于描述其特征的映射关系也更加复杂。使得在目标的真实描述中,特征变量(如灰度、信息熵、边沿等)之间往往相互耦合,特征变量与目标输出间呈强非线性关系。传统的核函数模型、浅层神经网络、支持向量机等方法均无法有效拟合这类强耦合非线性映射,从而导致遥感图像中目标的分割泛化能力较差、精度较低甚至分割失败。因此,如何确定遥感图像中目标的低秩特征空间,并构建目标分割的高维非线性映射模型是实现目标高精度分割的关键。