
下载掌阅APP,畅读海量书库
立即打开



通过对制造控制系统结构的演变分析可以看出,在复杂的、充满不确定性扰动的动态制造环境中,合理的控制结构非常重要。但是随着控制系统规模变大、结构变复杂,良好的协调机制和方法将对促使控制系统正常工作、提高制造系统的自适应性、控制的敏捷性和稳健性等起到至关重要的作用。
从广义上来说,所谓协调就是多个事物对相互之间依赖关系的管理,这对于群体活动的有序进行具有重要作用。协调活动广泛地存在于人类社会中,但是专门针对协调活动机制和原理的研究是源于人工智能(特别是多智能体系统)的研究需要。随着需要求解问题规模的扩大,各因素之间的依赖关系和协调活动就会凸显出愈发重要的地位。对于规模较大的问题,单个求解器(如个人、组织机构、动物、局部控制器等,以下以Agent代称)往往缺乏足够的资源、信息及能力去独立解决问题,这就需要在合理分解问题的基础上寻求多个具有不同资源、信息和能力的Agent共同完成全局问题的求解工作。由于各个子问题均是由全局问题分解而来的,它们相互之间既相对独立,又相互关联,这也导致各个Agent的子问题求解活动之间必然存在着相互依赖的关系,从而有机地构成了全局问题的求解过程。因此,对大规模问题的求解来说,协调活动是不可或缺的。
存在依赖关系且用来求解子问题的单个Agent为了将各自所解得的结果合并成为最终的全局解,需要通过交互以便协调各自行为,避免混乱和冲突,并达到最终的一致。在全局问题求解过程中,各Agent所拥有的信息、资源和能力均不同,其各自的目标也各有差异,因此,其行为方式各不相同,若无法达成一致,则可能演变成无序、冲突、混沌的状态,从而使局势往不利于求解全局问题的方向发展。而通过交互,个体Agent可以在处理自己任务的同时,及时了解其他Agent正在执行或将要执行的动作,并依据这些信息对自身的行为做出调整,最大化自己的效用函数并完成目标任务。Agent之间的信息交互往往是带有目的性的,很多时候都是为了改变周围Agent,对它们发出协调请求,影响接收方将来的行动。
协调技术与数据通信及中间件技术是有区别的。数据通信仅仅表示控制实体之间数据信息的传递过程,中间件技术则是指各个控制组件在动态开发系统中实现对等通信的技术,它们只强调过程而不关心信息交互后产生的后果。而协调技术强调的是借助信息交互后产生的对交互对象行为的相互影响,以及由此带来的整体局势的变化,并且,这种全局变化通常在协调活动开始之前就已经被作为协调的目标预见到了。
因此,良好的协调活动可以促使个体更好地认清局势,采取与周边个体协调一致的动作,使整体行为趋向于有序,以利于全局问题的求解,提升控制系统整体的性能,增强控制系统解决问题的能力,使智能控制系统可以处理更多的实际问题。而在制造系统控制领域中,协调的定义就是指制造系统的各个制造单元根据各自目标,在对已经拥有的资源进行合理安排的前提下,按照某种事先约定的规则进行相互协调,调节自身局部行为与全局总体目标之间的差异,使整个制造系统的生产活动从混沌转为有序,通过协同工作,快速、有效地完成制造系统的制造任务。
协调机制是指多个子问题求解器Agent之间进行信息交互,并因此决定自己行为时所共同约定的规则。设计良好的协调机制可以有效调节各个Agent之间的行为,快速有效地抓住子问题与全局问题之间依赖关系中的主要矛盾,引导求解系统的局势向有利于解决问题的大方向进化,最终使整个智能控制系统获得优良的系统性能。因此,如何合理选择和设计高效的协调机制,对于完成复杂系统的控制、改善系统的综合性能具有至关重要的意义。
协调机制的分类如图1.7所示,它是按照制造控制系统中的控制实体进行协调活动时相互通信的方式。本节将协调机制研究文献中的常用方法进行了归纳和分类,其主要分为:显式协调机制(Explicit Coordination)、隐式协调机制(Implicit Coordination)和其他形式协调机制。
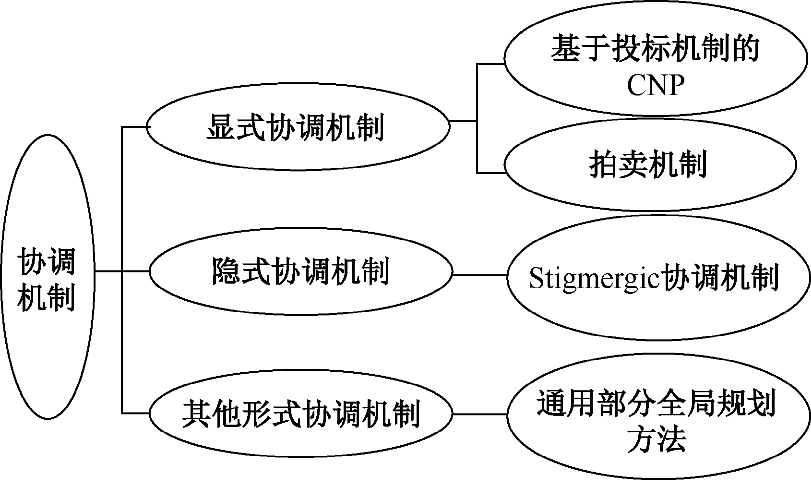
图1.7 协调机制的分类
1. 显式协调机制(Explicit Coordination)
所谓显式协调机制,就是制造控制系统中的各个控制实体在遵循共同约定的行为准则的前提下,通过信息传递明确表现出自身意图的协调机制。在显式协调机制工作过程中,控制实体之间必须进行交互,因此,首先,其必须具有通信模块(有时会很复杂)。而单个控制实体做决策时往往也需要参考来自周围控制实体的信息,导致其控制结构会变得复杂。但是,在制造系统协调过程中使用显式协调机制时,参与协调的控制实体是允许拒绝别的控制实体的协调请求的,这就使各个控制实体可以具有各自不一样的目标,从而使显式协调机制既可以用于分布式制造系统的协调问题,也可以应用于各种动态开放的环境中。典型的方法主要有合同网协议(Contact Net Protocol,CNP)和拍卖机制等。
(1)合同网协议
CNP(合同网协议)是由Smith和Davis为了解决分布式问题求解系统的任务分配问题所提出的一种协调机制,其最早应用于传感器的分布控制系统。当前,在制造领域的各个方面,CNP及改进式CNP得到了非常广泛的应用,如车间调度、机械人协调、物流系统调控等,Caridi等人在其关于Multi-Agent系统的综述中也指出,CNP的使用比例达到了53%。
CNP是模拟市场经济中的投标机制,规定了控制实体的交换意图过程。在使用CNP协议时,需要首先定义两种重要的Agent:管理Agent和资源Agent。其中,管理Agent负责接收上级任务,然后进行评价,判断是否可以由单个Agent独立完成,若无法独立完成,则向其余资源Agent发布任务标书。收到标书的资源Agent对任务招标信息进行评价,并对有能力完成的任务标书进行投标,否则继续等待。管理Agent对返回的标书进行评价,并选出最优者,向其发出中标信息。双方再次经过一轮协商确认后,签订最后协议,然后分配任务。
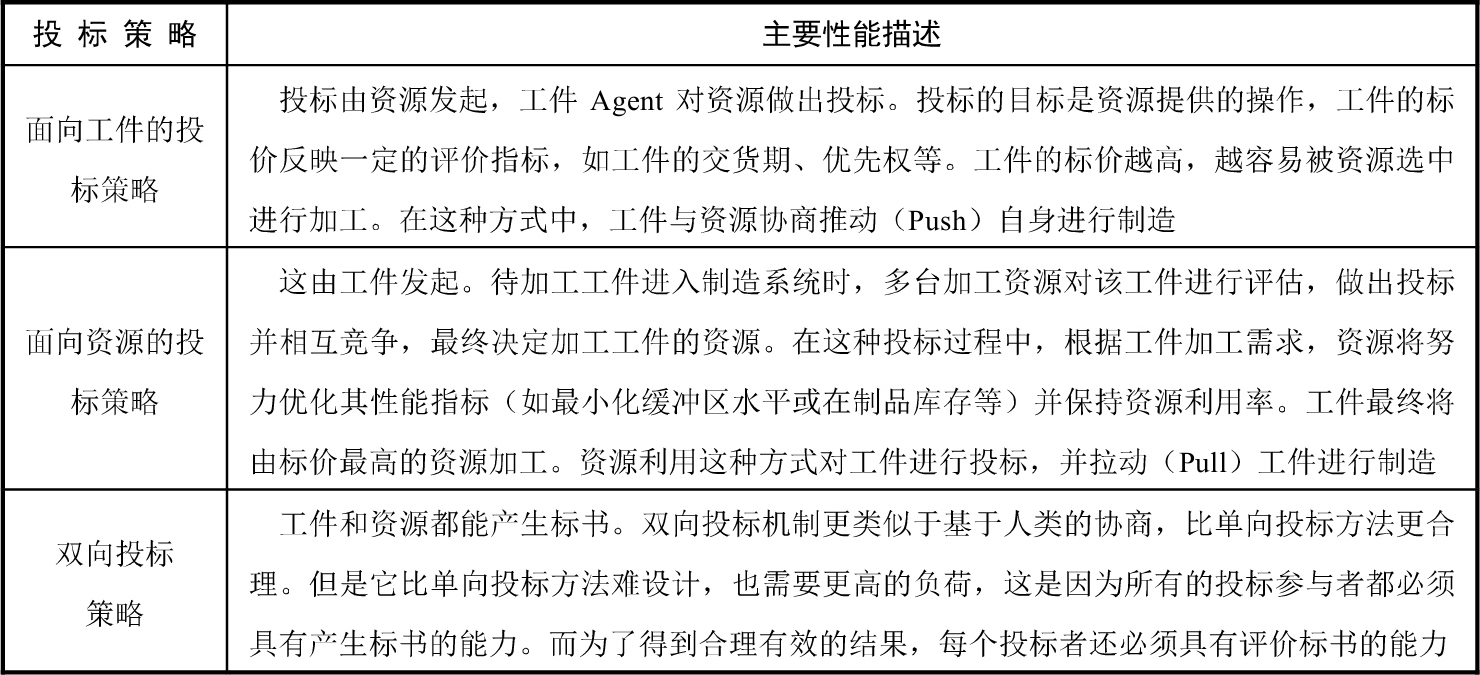
CNP运行的基础和核心就是投标机制,其在制造系统调度领域中常用的投标策略主要分为面向工件的投标策略、面向资源的投标策略,以及面向工件和资源的双向投标策略,其主要特征见表1.2。
表1.2 投标机制的分类
虽然CNP在很多方面具有优点,但由于没有很好地定义其协议范围,导致其全局优化能力欠缺,并且难以预测系统性能。因此,为了改进CNP,建立更合适的协商框架,减少通信数据量,提高协调效率,使其可以应用于更多的场合,众多专家学者对其进行研究,并陆续提出了大量的改进型合同网模型。例如,国际Agent技术推广协会FIPA(The Foundation for Intelligent Physical Agents)在研究基于Agent应用的交互规范时,提出了迭代合同网协议,提高了多Agent协商的效率;日本学者Takuya在其研究中提出了通过范例推理的方法来减少协调过程中的通信总量;有的学者拓展了招标步骤,针对任务目标预先模拟招标,之后再根据评价进入协商过程,从而进一步优化了系统性能;或是对招标结果根据目标函数进行一定的修正,从而提高了改进后CNP的工作效率;通过对Multi-Agent系统中具有时间窗口的多AGV(Automated Guided Vehicle,自动导引小车)路线规划问题进行研究,有学者提出了允许解除承诺的改进型CNP,提高了系统的整体运行性能。但是,CNP仅仅是对工作流程的一种规定,本身并不具有优化能力,且在协调过程中仍然不可避免地存在着通信量大、不确定性突出、耗费大量通信资源及可能引起死锁等问题。
(2)拍卖机制
拍卖机制是一种在信息不完全情况下的静态博弈,即拍卖方在给定自己的类型,以及给定其他参与人的类型与战略选择之间关系的条件下,使自己的期望效用最大化。在应用拍卖机制协商时,其中参与的各方Agent均是秉承自利原则的,拍卖方希望通过拍卖的方式将任务所要实现的目标最优化,而投标方则希望通过拍卖的过程以最小的消耗完成最多的任务。在研究拍卖型协调机制并改良其性能的过程中,人们主要是针对拍卖规则进行改进,研究买卖双方所使用的策略,分析拍卖方法的性能。根据具体应用环境的变化和拍卖规则的不同,基于拍卖机制的协调方法可以有多种不同的规则,如Sandholm的多策略组合拍卖机制,FIPA组织提出的荷兰式和英式标准化拍卖规则等。
除此以外,还有很多其他类似市场拍卖的协调机制,如通过对分布式制造环境下的制造加工任务的成本,计算出对应任务报价,应用基于价格模型的协商机制在制造Agent中对制造加工任务进行分配。通常情况下,对这种基于市场拍卖模型的协调机制来说,价格是主控因素,当参与协调任务的Agent数量增多时,可能会导致协同收敛过程变得缓慢,但是可以通过引入其他控制要素进行调节。
2. 隐式协调机制(Implicit Coordination)
所谓隐式协调机制,是指参与协调控制的各个Agent之间的交互方式与传统的需要明确表示自身目的的显示通信相反的通信协调方式,即它们相互之间并不发送明确的符号信息,甚至都不知道相互之间的存在,只是根据某些事先内部建立的完整的合作机制,依据系统中的各种“暗示”,各自进行活动。这样可以保证单个Agent在处理局部问题上的自治性,又可以在一定程度上使其行为有利于全局目标,能为系统的群体利益做出贡献。隐式协调机制是以某种隐式定义和系统中各Agent公认的规则作为单个Agent的行为逻辑,并以此为基础对系统中的各Agent进行协调控制的机制,其可以保证系统中的各个Agent之间在不通过任何形式的形式化通信的前提下进行信息交互。一个典型的隐式协调应用范例是运用在现代数学分支学科—运筹学的博弈论中的各种协作机制,而另一个则是在一些群居的低等动物(如蚂蚁、蜜蜂等)组成的社会群体中基于信息素的Stigmergic协商机制。
在这些由膜翅目或等翅目的昆虫组成的低等动物社会群体中,昆虫个体并不借助语言进行沟通,而是通过每个个体根据自身接收周边环境的刺激而自发分泌出来的某种化学物质—信息素来相互交换信息,以此进行沟通。独立的个体所释放的信息素在其活动的环境中被整合,其他个体则依据环境中所能感知到的信息素强度来决定自己的行为动作。比如,昆虫个体通过释放性激素来告知群体的各个异性昆虫“我准备好了”;蜂群或蚁群在遇到袭击或入侵时,会释放报警信息素(Alarm Pheromone)来通知整个群体对攻击者或入侵者进行反击行动;蜜蜂在发现蜜源后会在蜜源周围释放标记信息素(Labeling Pheromone),用以指示其他蜜蜂可以更快速地寻找到该处蜜源。由此可见,虽然群体中的每个个体之间没有语言通信,但是,借助释放在环境中的信息素的调节作用,蚂蚁、蜜蜂等群居类昆虫可以有效地引导个体快速地融入当前群体所需要的整体目标中,从而实现群体中个体的彼此行为的协调。虽然这些弱小的个体独立生存能力很差,基本无法独立生存,但仅依靠“感知—动作”这种个体本能动作,可以在信息素的帮助下,使数目庞大的个体形成一个可以有条不紊完成各种复杂任务,具有稳定有效协调合作秩序的群体,并在漫长的自然淘汰中存活下来,这直接证明了隐式协调机制的强大效能。
1956年,法国动物学家Grasse在对群居的昆虫社会的运作机理进行深入研究后,专门构建了一个新词—Stigmergic来表征昆虫社会中这种利用非符号的异步交互方式,随后,越来越多的研究者发现群居昆虫社会中的这种基于隐式协调机制的调节方式在协调合作和群体秩序等方面有很多优秀的属性。例如,参与隐式协调的Agent由于采用的是非符号式通信手段,其无须进行复杂的通信及信息处理,只需要一个简单的行为决策模块,因而其结构比较简单。同时,昆虫社会隐式协调机制成功的关键在于每个个体的利他原则,即Agent个体并不包含协调策略,其个体决策准则就是不计较个体利益,而是以便利地与他人协调为目的,这样可以保证整个团体的稳定运作。因此,如何有效利用这种简单的隐式协调机制已成为人工智能领域的一个研究热点。
比如,将Stigmergic隐式协调机制应用到单电子隧道技术中的计算空间优化分配等方面,提高了计算效率。而在多台机器人的任务协调分工方面应用了基于Stigmergic隐式协调机制进行优化分工。有的学者针对单元制造系统(Celluar Manufacturing System,CMS)中的多单元协作加工问题,提出了基于信息素的柔性路径加工调度方法,利用Stigmergic协商机制建立了基于Multi-Agent的单元制造系统模型,并通过实验验证了Stigmergic协商机制的优化性能及系统良好的稳健性。而在车间控制系统层面上,有学者将基于激素的协商机制应用于其中,并以此为基础建立了原型系统,验证了Stigmergic协商机制在混合流水车间的控制系统中的应用,并取得了良好的效果。在Holonic制造系统中,研究者通过模拟蚂蚁觅食的过程,提出了基于Stigmergic协商机制的制造控制系统,并通过案例仿真证明了基于Stigmergic的协商机制具有良好的任务优化能力,以及针对动态环境的自适应能力,指出其更适用于处理制造系统中的动态突发事件,或是利用RFID技术和基于Stigmergic的简易机器人控制策略模型,通过大量实验验证在多机器人环境下该控制方法的可行性和高效性。
通过上述分析可以看出,基于Stigmergic的隐式协调机制采用的是非符号方式的通信,其通信负荷较低,内建的协调机制以利他性为原则,具有较高的优化性能和良好的自适应特性。而且,根据众多研究应用可知基于Stigmergic的隐式协调机制还具有以下几个主要特点:①环境是解的一部分,其不仅充当了信息传递的媒介,还起到了总合的作用,同时还隐含了系统的复杂性和动态性;②全局信息局部化,系统中各Agent给出的信息仅表达了局部信息,而其获取的信息也非全局信息,而是局部环境中多个Agent给出的信息总和;③信息的获取和给出不需要在时间上具有确定的对应关系,即采取的是异步通信方式。
通过对基于CNP的显示协调机制和基于Stigmergic的隐式协调机制进行定性的对比分析可以发现:基于Stigmergic的隐式协调机制在系统目标的优化能力、系统计算负荷、通信负荷和消除系统内部变动所产生的涟漪效应等方面具有较大的优势,但是,相比CNP,其在制造系统资源负荷平衡、针对任务变动的适应性及系统针对不同领域Agent的开放性等方面相对较弱。同时,在研究基于Stigmergic的隐式协调机制过程中,如何通过系统参数与奖惩算法的合理设计来加快系统适应过程也一直是本领域的研究热点和难点。
3. 其他形式协调机制
针对半导体生产调度中批量生产交货期问题,有学者提出了Look-Ahead任务协调分配策略,使批量生产下的交货期问题得到了优化处理。针对协调分布式车辆检测测试系统中的Agent,有研究者提出了PGP(Partial Global Planning)方法,利用其给各个Agent提供局部规划,然后由各个Agent之间进行合作,交换各自的局部规划来求解全局问题,进而完成总体目标。后来美国的Decker等人在PGP的基础上进一步完善和扩展了其协调内容和方法,提出了GPGP(Generalized Partial Global Planning)协调规划方法,利用模块化的协商方式和图形化任务描述语言TAEMS(Task Analysis,Environment Modeling and Simulation),为Multi-Agent系统提供动态的柔性协调方案和信息表达工具。在针对并行机协调调度问题研究中,将分支定界法与拉格朗日松弛法(Lagrangian Relaxation,LR)相结合的混合算法应用于其中,获得良好的实验结果。在柔性制造系统中,应用改进型的时间Petri网方法进行协调控制,并通过评价任务序列等待时间等指标来提高制造系统的快速响应性等性能;并且在分布式制造系统的协调调度中,也尝试将混合Petri网方法应用于其中,这样能够有效地解决并行制造中的相关问题。
所谓制造系统协调机制的形式化描述,就是用具有严格语法和精确语义的描述能力足够强的语言,对协调过程的并行性进行建模和分析,并能够利用这种表达方式验证和转换交互协议的静态和动态模型,其最终表述应该逻辑性强,简单易懂,具有相应的工具支持。这也是形式化描述运用这些协调机制的现代制造系统体系结构的基础。
目前,经常用于描述协调机制的典型方法有π演算、增强Dooley图(Enhanced Dooley Graphs)、CPN(Colored Petri Nets)、AUML(Agent Unified Modeling Language)、STD(State Transition Diagrams)和DFA(Deterministic Finite Automata)等。
π演算是进程代数的一种,具有良好的数学和逻辑框架,可以对并行系统内部具有动态结构的进程及进程间的交互进行描述和分析,但难以对Agent模型进行形象的表述。Dooley图可以详细地表述Agent的各种状态信息,但其无法对进程中的并行交互行为进行描述。CPN是一种基于图形化的建模工具,对于描述分布式系统和并行系统中的交互协议非常适合,但其同样缺乏针对单独Agent描述的模块化概念,并且当系统规模变大、复杂程度增加时,利用CPN进行建模描述时会产生状态爆炸现象。STD表述简洁,在对自治单元之间交互协议的描述中经常用到,但其对交互时间需要有确定的对应关系,即无法对异步通信形式进行表达,无法表示协议的集成。DFA可以在对Agent交互协议进行建模的同时对其进行验证,但是面对复杂的Agent交互过程则显得力不从心。