
下载掌阅APP,畅读海量书库
立即打开



通过上述分析,我们不难看出,生物有机生命系统的生理活动和现代智能制造系统的生产活动在很多方面具有惊人的相似性。生命系统本身是一种动态的开放系统,由简单的细胞逐渐形成具有某种功能的组织,再由相近功能的组织形成各种专门的器官,然后不同作用的器官组合在一起形成了复杂的生命系统,这种结构天然具有高度的分布性特点。生命系统能够在大自然的各种不同环境中生存下来,说明其自身对于外界环境具有很强的自适应能力,同时还能够通过自身的某些协调控制机制实现生命体的进化与群体之间的协作。现代智能制造系统与生命系统类似,也是一种分布式的动态开放系统,制造系统的运行也需要与外界保持物质交换,维持内部各种设备和部门运作的协调性。现代智能制造系统往往是由很多具有自治特性的智能生产设备、AGV、各种机械传输装置、智能检测设备及制造资源等,通过合理的协调控制组合而成的一个庞大而复杂的典型的分布式系统,在这样一个系统中,可以借鉴生命系统中某些优秀的控制结构或协调机制。有研究者从生物控制论的角度解释了人体的一些自适应控制机制和规律,并对生物系统中的子系统与工程控制中的一些系统结构与功能进行了对比,发现在很多方面两者具有惊人的相似性,并且都可以通过相同或相似的组成部分来描述它们的控制机制。因此,在构建现代智能制造系统组织结构和控制协调模型时,尝试赋予制造系统的组成基元或智能子系统更多的生命有机体的特性,适当增强个体的自治能力,同时模拟人体神经内分泌系统的内部协调控制机制进行调控,不仅可以简化制造系统中各个功能单元之间复杂的耦合关系,还可以有效地对现代智能制造系统的智能性、自组织性、动态环境的自适应性和可重构性起到良好的促进作用。进入21世纪以后,现代智能制造系统不再是由一堆死板的、缺乏足够自治能力的生产设备和各种物料组成的,其发展方向必然是希望制造设备或智能生产基元能够独立地根据实时的加工情况,按照其所能感知到的环境状态和已设定的目标,自主地决策下一步的行为动作,更高效合理地完成各种制造任务。
随着科技的发展,制造业的数字化、信息化趋势愈发明显,而生命科学也逐渐由单纯的科学研究转向了更全面的工程化应用,现代智能制造系统与生物系统之间的相似性也就愈发明显和突出,其相互之间的可借鉴性也变得更加具有可行性。从生物控制论的研究成果中我们可以发现,在生物系统中,其整体控制呈现一种递归特性,而其中各个不同层次的子系统又均具有自协调、自组织的特性,都可以灵活地根据周边环境的变化进行自我调节,使生物系统针对复杂多变的外部环境具有更多的灵活性和更强的适应性。比如,人体神经内分泌系统中的神经网络可以感知外界刺激,并产生兴奋或抑制某些生理活动的电信号,而后由内分泌系统接收这些信号,进而分泌出相应的激素物质,通过人体体液循环系统调节相应的器官或组织,从而协调控制人体某些生理活动。与此过程类似,借鉴生物自适应、自组织机制,现代智能制造系统应该能够根据市场波动和市场订单快速地克服各种意外干扰,高效地协调和控制自身各种生产活动,这样就可以有效提升企业核心竞争力,迅速适应动态多变的市场,并在激烈的市场竞争中占据一席之地。
因此,在搭建复杂而庞大的现代智能制造系统模型时,参考模拟生物系统的结构形式,针对制造系统的组成实体或子系统给予一定程度的自治能力,不仅可以简化系统各单元的耦合关系,有效提高系统的开放性、灵活性、可重组性和可扩展性,而且可以有效提高整个系统的智能自组织能力和对环境的动态自适应能力。
随着人类社会的不断进步和市场经济的不断发展,现代制造系统的组织结构变得愈发庞大,其制造过程也愈发精细。面对制造系统不断增强的复杂程度,从自然界的各种生命现象中学习其协调与控制复杂系统的原理与机制,是解决当前制造业中所出现的众多疑难杂症的一条有效的、甚至是必然的出路。如果现代智能制造系统想要能够快速地满足复杂的系统运行环境中的各种要求,应模拟生物有机体的调控机制,不仅在静态时需要能够快速地安排优化常规动作(任务),还需要能够具有与生物有机体类似的组织控制结构,以便在制造系统运行环境发生动态变化时能够具有及时响应并快速协调的能力。这种模拟生物机体的自适应与自调节的能力不仅可以在智能基元内部运作,而且还可以在智能基元之间发挥作用,如此,现代智能制造系统才可能在一定程度上体现出生物智能性,更多地发挥出系统的实际制造能力。
通过前文中对现代智能制造系统的分析与类比,以及受到神经内分泌系统及其优越的生物协调控制机制的启发,首先构建类生物化智能自治基元的构成及其控制器的结构,并探讨了其有机特性。在此基础上,针对现代智能制造系统静态任务分配、制造资源动态协调及生产物流中在制品动态库存控制的问题,本章阐述了一个类生物化智能制造系统控制协调模型,从内分泌系统的激素分泌与协调及多重反馈控制结构等方面来研究类生物化智能制造系统中信息流的协调机制与物质流的控制原理。
1. 类生物化智能自治基元
基于现代智能制造系统的分析和受生物体内分泌系统调节机制的启发,我们首先对基于内分泌调节机制的类生物化智能制造系统的基本组成—智能自治基元进行了构建,其地位就相当于机体内分泌系统中的某种细胞组织或腺体器官,类生物化自治基元的基本结构如图2.8所示,它是一个由感知器、控制器、执行器及数据信息库等多模块组成的具有自组织和自适应功能的自治实体。
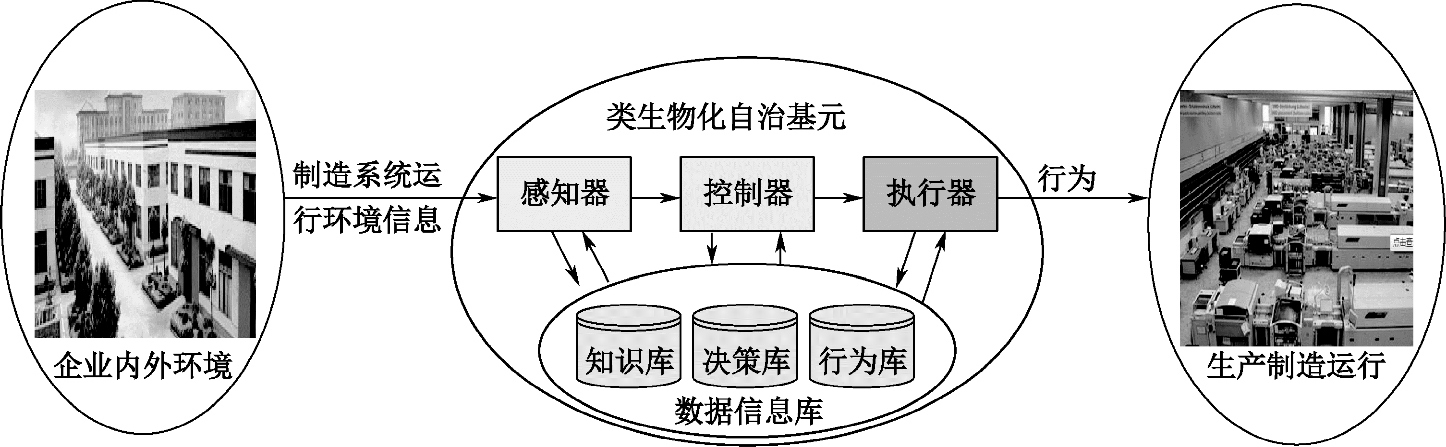
图2.8 类生物化智能自治基元
在现代智能制造系统中,其与生命有机系统类似,都必须通过不断地与外界进行物质、能量及信息等方面的交换来实现自身系统的正常运行与生存进化,以便更好地适应周围环境的改变。同样,作为类生物化智能制造系统的基本组成部分,智能自治基元也必须具备相应的功能,其通过感知器获取制造系统运行环境中的各种信息,并通过控制器结合数据信息库进行决策判断,选择合适的行为通过执行器输出。与生物有机体所处的自然环境一样,类生物化智能制造基元所处的制造环境也分为内环境和外环境两类,前者主要与智能基元的资源构成和内部控制结构有关,其表现形式是控制的实时性;而后者主要是与智能基元运作的周围环境中的变化相关,其表现形式是突发的波动性和控制的滞后性。类生物化智能自治基元由感知器来收集内外环境中的信息,控制并决定如何对内外环境中的各种变化进行平衡,由执行器来处理由内外环境变化所带来的制造过程中的复杂性。而现代智能制造系统的运行环境与市场需求、原料采购、新品开发和工艺更新等多种因素具有密切关系,而这些因素均存在着一定的不可控性,正是这些不可控的因素引起了制造系统运行环境的动态多变。如果现代智能制造系统的运行环境没有这些不可控因素,那么类生物化智能自治基元的控制和协调机制就会变得没有意义。基元的设计与构建就是为了寻求一种更合理、更快捷的途径来处理制造系统这些动态变化的基本构成。
从图2.8中可以看出,类生物化智能自治基元具有与生物体类似的结构,它可以通过自身的感知和知识,决定应对突发事件的处理方式,具有应对动态多边的制造系统运行环境的快速响应能力和自适应的处理能力,可以通过感知器与周围的其他基元进行协调合作,体现出生物特有的对环境的感知性、对变化的适应性和对处理结果的学习性的特点。在智能自治基元所能够表现出来的各种类生物特性中,其递归控制结构最为典型,如图2.9所示。类生物化智能制造系统可以看成由很多个智能自治基元通过不同层次的控制器相互协调组合而成,其中,智能自治基元又可以由基元控制器和下层不同的智能基元构成,最底层的智能基元则可能是由单个的数控机床、AGV或其他多个制造实体通过基层的智能基元控制器组合而成的。因此,类生物化智能自治基元乃至基于此的整个智能制造系统都体现出多层自相似性的递归结构,这种结构可以在不同的层次上进行自组织活动,降低了系统整体的复杂度。
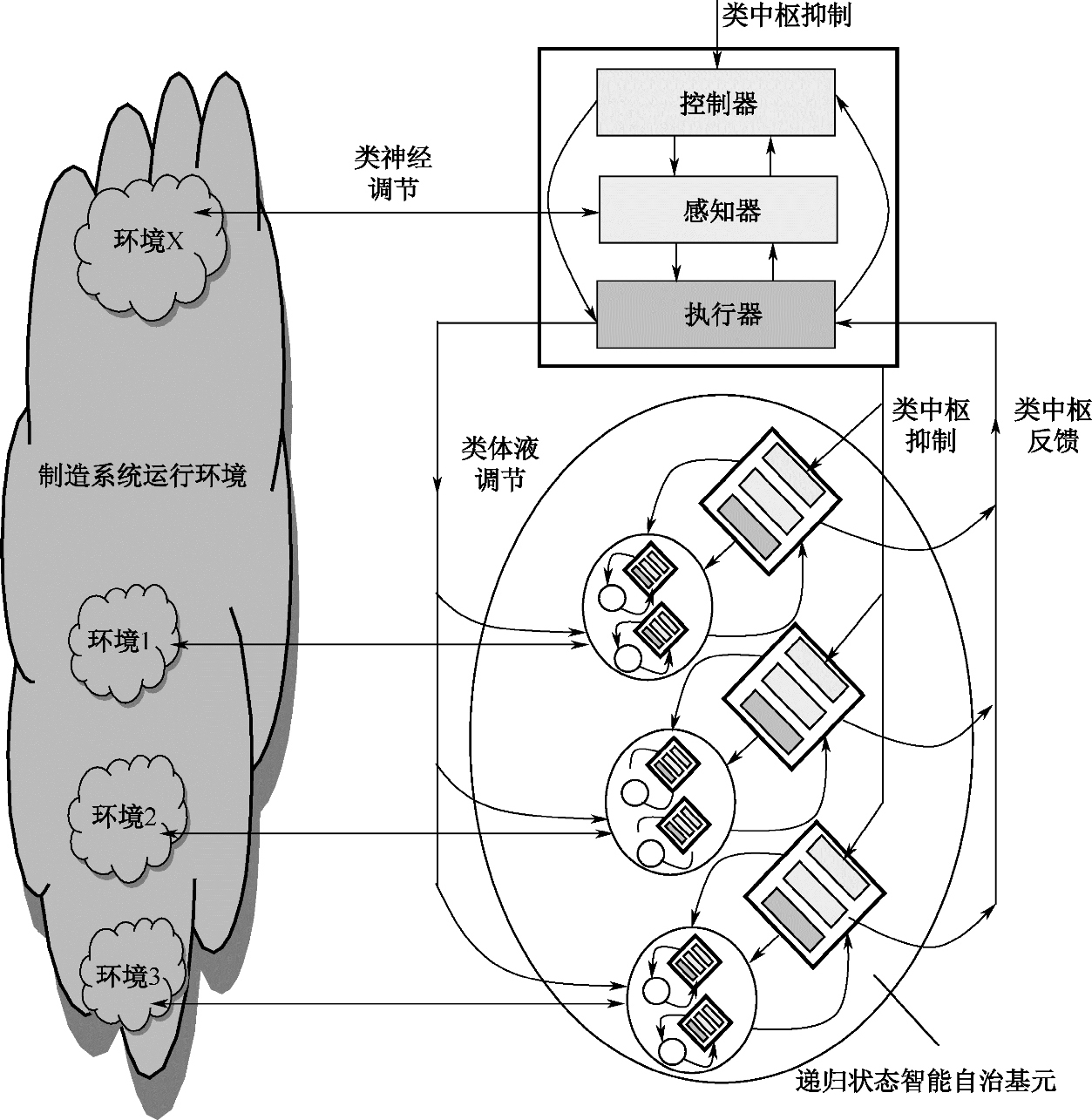
图2.9 类生物化智能自治基元的递归结构
2. 类生物化智能制造系统的协调模型
基于内分泌系统的优良协调特性,在构建类生物化智能自治基元的基础上,我们建立了现代智能制造系统的类生物化控制与协调模型,如图2.10所示。与生物有机体的构成类似,现代智能制造系统中的各种自治基元可以被模拟成内分泌系统中的各种腺体,其感知周围环境和协调合作完成制造的过程可以模拟成激素分泌扩散和相互影响的行为。该模型主要从控制信息层和物料流动层两个层次来研究内分泌系统的调节机制在类生物化智能制造系统中的控制和协调问题。在控制信息层,基于激素调节机制的智能自治基元在一定程度上具有自我决策的自适应性,可以利用内分泌系统的优良调控机制对现代智能制造系统中的生产任务与制造资源之间的静态环境中的调度问题和动态环境中复杂的协调问题进行良好的处理,可以有效提高整个制造系统的智能性和对动态问题的敏捷响应性。而在物料流动层,可以将神经内分泌系统中的多重反馈控制结构运用到生产过程中的在制品库存动态控制模型中,以便使制造系统在运行过程中(模拟体液循环环境)可以更快捷地调整物料的流转数量,提高系统的运行效率。例如,在正常情况下,生产任务(腺垂体分泌的促激素)分解下发到各个智能自治基元(腺体)上,自治基元根据接收到的任务来进行内部调度(分泌激素),如果在运行时遇到突发意外(如某个设备故障等),则该信息会反馈到智能自治基元的控制器中,然后由决策模块进行判断,若能内部处理则自行解决问题;否则,基元控制器就会向上级单位分泌激素信息,提出协作请求,上层控制器则会再分泌相应的激素信息,使各个智能自治基元中有余力的实体进行动态资源重组,组成临时的生产单元,在保证完成制造系统总体目标的前提下,处理系统遇到的意外情况,从而使现代智能制造系统的局部任务和全局目标在内分泌调节机制下均可以得到优化,并体现出强大的个体自治性和系统全局协作性。
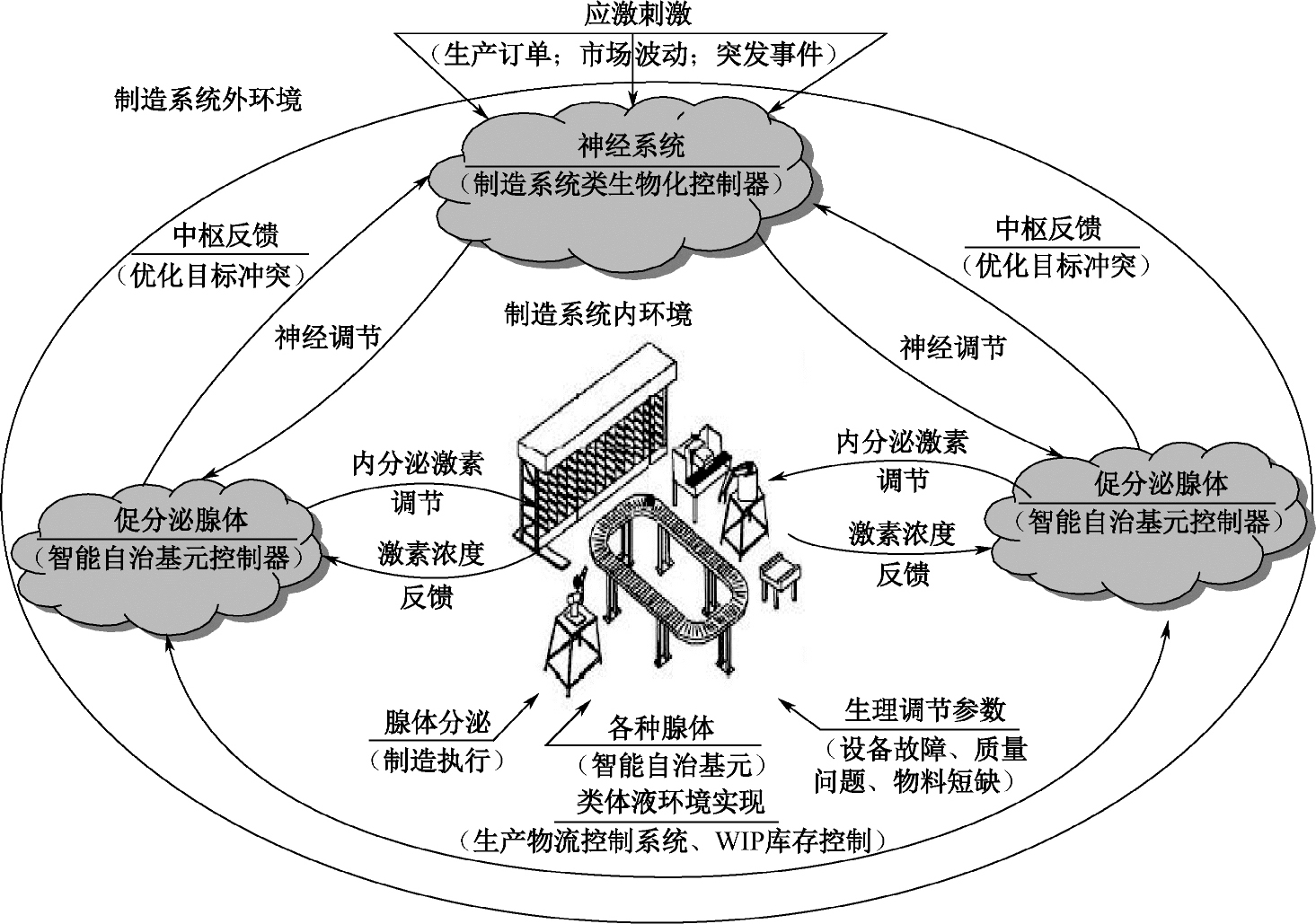
图2.10 类生物化制造系统协调模型
3. 类生物化智能制造系统协调机制实现的思路
针对本书所构建的类生物化智能制造系统的协调模型,我们计划从下述几个方面对其中的部分关键技术进行研究和实现。
(1)神经内分泌系统在生物体的机体调控功能中起到至关重要的作用,它通过激素调节的方式使生物系统能够在各种复杂的环境中体现出良好的自适应性和稳定性。各种激素的分泌变化规律通常都遵循Hill函数,通过相互之间的影响来实现机体生理活动的快速自调节功能。基于此,借鉴激素浓度的调节规律,在信息控制层面的绿色车间调度问题中,针对粒子群优化调度算法,设计了自适应激素因子,使粒子之间的信息可以更全面地共享,在保证粒子群算法过程中粒子种群多样性的同时,解决了传统粒子群算法在求解车间调度问题中存在的易于陷入局部最优和收敛速度缓慢等问题。
(2)在神经内分泌系统的调节过程中,基于激素协调的方式是一种隐式的动态协调方法,具有强大而有效地动态协调与寻优能力。因此,受生物内分泌系统中激素反应扩散机制的启发,我们对现代制造系统的任务与资源协调分配的数学模型进行了分析,构建了制造系统中相关激素量的奖惩函数,将研究基于激素反应扩散机制智能制造系统的隐式动态协调原理与实现方法。
(3)在物料流动层面,为了对基于神经内分泌调节机制的智能制造系统内部生产物流系统的及时配送能力进行协调控制,将以零件在制品为研究对象,结合神经内分泌系统的多重反馈控制结构,对已有的在制品库存模型进行优化,建立动态生产环境下的在制品库存控制模型,以提高制造系统物流系统的配送能力和抗扰动能力,增强制造系统控制的稳健性。
1. 自治性与协作性(Autonomy and Cooperation)
类生物化制造系统是在分布式制造系统的基础上,受生物有机体的内分泌调控机制启发而形成的一种新型智能制造系统,它模拟生物内分泌系统工作原理所设计的智能自治基元具有双重倾向,一方面可以模拟激素腺体具有自决趋向,即维持其作为一个独立自主的个体存在的趋向;另一方面可以模仿内分泌系统整体协同工作的特点,通过协调机制可以与其他自治基元合作形成更大的系统。体现在类生物化制造系统中的智能自治基元上的基本特性表现为自治性(Autonomy)和协作性(Cooperation)。自治性主要是指类生物化自治基元的自决趋向可以使其在面对外部环境的突变时自主做出各种合适的反应,提高系统的稳定性;而协作性则表现为类生物基元通过某种协调机制相互合作,集成为一个更大的整体,以便完成更大、更复杂的任务。
自然界中生物的进化过程也体现了这种自治性与协作性的过程。例如,生命最初是以单细胞形式出现的,而随着生命系统的进化,细胞个体逐步集成为更加复杂的生物体以便应对各种环境中的生产进化挑战。从行为科学上来分析,个体的自决性往往表现为个体所固有的行为模式或习惯,而集成性则体现为具有创造性的学习能力和应对动态变化环境的自适应性等。在现代制造系统中,数控机床中的程序控制实质上可以看作机床的自决趋向,它是制造资源所固有的某种行为模式;而市场对产品的不同需求却使不同功能的数控机床或其他生产设备必须集成起来以满足顾客需求,这又体现出了制造系统的集成化趋向。
类生物智能自治基元所具有的自决性与协作性的特点使制造系统的基本组成单元在实现内部自治的前提下,可以通过优良的协调控制机制更好地实现制造系统全局目标的优化。所以,基于该特性下的类生物化制造系统可以在不确定性的动态制造环境中获得良好的自适应性和自组织能力,面对突发扰动具有良好的快速响应能力。
2. 动态平衡与无序(Equilibrium and Disorder)
类生物化制造系统在运行状态时,其所包含的智能自治基元在各自内部有自决的趋向,而在基元外部又有协作集成的趋向,因此其整体始终处于某种动态的平衡之中。合理的协调控制机制可以有效地维持类生物化制造系统的这种动态平衡,使自治与协作的优势得以最好的发挥。如果两种趋向中的某一种趋向占据了较大的优势,则会导致类生物化制造系统中的这种动态平衡被打破,从而导致系统的无序。
3. 多重递阶(Multiple Hierarchies)控制结构
类生物化制造系统中的任何智能自治基元均可以同时在多个不同的递阶控制结构中承担不同的角色,进而使整个制造系统中的控制系统形成多重递阶控制结构。在生物有机体中,神经内分泌系统起整体控制协调作用,其有效的控制结构正是这种多重递阶结构。通过将多个递阶控制结构进行交叉重叠的方式构成复杂的大型控制系统,可以通过良好的协调机制使类生物化制造系统拥有较强的稳定性和稳健性。
4. 自催化和自反馈机制(Auto-catalytic Set and Positive Feedback)
在生物系统中,为了使自身能够适应复杂的自然环境,通常会在机体内部形成某种生理系统或调节机制,使生物能够不断地完善、进化自身,从而能够在残酷的自然选择中生存下来,这是自然界中自催化机制的由来。而在制造系统中,同样需要该种自催化机制,例如,当某种控制体系结构可以较好地满足市场需求所带来的控制要求时,就会得到更多的支持,有利于其不断地进行自身改进,从而更加具有竞争力。类生物化制造系统同样是按照这种思路设计的,即先在分布式智能制造系统的某个局部区域里采用类生物化控制协调的机制,以展示出类生物化系统的各种优良的控制特性,最后再逐步将其推广到整个制造系统。同时,为了更好地体现类生物化基元的自治特性,类生物化制造系统中还构建了超短反馈机制,当制造系统局部出现干扰时,首先通过超短反馈将干扰信息反馈给生产设备自身的控制器,并由其调整分泌相应的激素(工艺参数)自行解决问题。如果自身不能处理,则通过类体液网络将问题信息反馈给上级自治基元控制器,通过协调合作的方式进行处理。