
下载掌阅APP,畅读海量书库
立即打开




充分利用相控阵雷达波束扫描的灵活性,灵活配置时间和波形资源,实现对导弹目标的快速搜索、捕获、跟踪和识别等,完成复杂的战略、战术任务。导弹防御系统中的远程预警雷达担负着对重点空域的预警任务,精密跟踪识别雷达在远程预警雷达引导下完成引导截获、跟踪和识别等任务,在引导窗口内搜索发现目标后,发出确认波束进行目标搜索确认,完成对目标的捕获,对捕获成功的目标转入稳定跟踪,并按照一定的数据率维持跟踪,直至目标消失或跟踪被取消。相控阵雷达需完成对多个目标的搜索、捕获、跟踪资源的优化管理,实现对导弹目标的快速、稳定捕获和高精度跟踪 [3-5] 。
图3.5 重点搜索空域示意图
相控阵雷达在导弹预警时,可以根据需要将整个搜索空域划分成若干个子搜索空域,将某些空域作为普通空域,将其中的某些子空域作为重点,对该重点空域分配更多的信号能量,以保证具有更远的作用距离。图3.5给出了雷达重点搜索空域示意图。由图3.5可见,对第一搜索区用增加天线波束驻留时间或采用更宽信号脉冲宽度来增加该区域内的作用距离就是一例。
对重点搜索空域也可以提高搜索数据率,即增加该空域内的搜索数据采样率。以图3.5所示的空域划分为例,若要求对第一区增加搜索数据率,则可按如图3.6所示的方法,对三个区域的搜索间隔时间进行分配。第一区域的搜索间隔时间 T s1 要小于第 T s2a 、第 T s2b 两个区域的搜索间隔时间。第 T s2a 、 T s2b 两个区搜索完一遍以后,第一区域已搜索完两遍,因而第一区域的搜索数据率要高一倍。

图3.6 重点空域搜索资源分配
精密测量雷达往往波束较窄,不具备大范围搜索捕获目标的能力,需在远程预警雷达的引导下进行目标截获搜索。对导弹目标引导截获搜索资源的管理分析如下:
假设某远程预警雷达给某精密测量雷达提供引导截获预报。在精密测量雷达坐标系下,预报某导弹的截获距离为
R
,预报导弹在截获处的方位角、俯仰角误差均方根为(Δ
φ
,Δ
η
),则精密测量雷达截获窗单边厚度为预警雷达交接角精度的3倍,考虑方位、俯仰两维角度上的截获,截获窗厚度可设置为7Δ
φ
·7Δ
η
,可保证目标处于截获窗内的概率为
P
cross
=0.9995。假如导弹目标最大穿越速度为
v
,则导弹穿越截获窗覆盖区域的时间为
T
p
=
 。
。
假如精密测量雷达波束宽度为(Δ θ ,Δ ξ )(约0.5°),单个波位驻留时间为 T ,检测概率为 P dect ,则单屏搜索截获时间为:
(3.5)
有效截获的条件之一为: n 次搜索截获时间须小于目标穿越搜索窗时间,即 nT c ≤ T p 。搜索 n 次且满足截获条件的目标截获概率为:
P capture = P cross (1-(1- P dect ) n )
(3.6)
精密测量雷达应按照尽早截获目标的原则设计截获屏,假设远程预警雷达与精密测量雷达在距离精密测量雷达1600km处交接,5000km射程导弹最大速度约为6km/s,精密测量雷达单波束检测概率 P dect =0.9,波束宽度为0.5°,搜索截获目标时每个波位的驻留时间为16ms。随着远程预警雷达预报的角度误差不同,精密测量雷达截获窗口的大小、搜索次数都将随之而变,此时可计算出相应的截获概率,对应关系如表3.1所示。
表3.1 1600 km 处引导角误差与截获概率关系表
这意味着,如果预警雷达提供的引导角误差较大,精密测量雷达所需设置的扫描窗也越大,才能覆盖目标可能出现的区域,而扫描所需要的时间就会越长。因为受单波束检测概率的限制,如果穿越时间内搜索次数少,截获概率难以提高。比如,表3.1中,如果远程预警雷达的引导角误差约为5°,目标穿越该区域的极限时间约为69.81 s ,而精密测量雷达需设置70×70的扫描窗才能覆盖该区域,该屏扫描一次所需要的时间约为78.40 s ,这表示精密测量雷达还未扫描完1次,目标就穿越该区域,此时截获概率不足89.7%。假如远程预警雷达的引导角误差达到1°,则精密测量雷达可以设置14×14的搜索窗足够扫描4次,目标还未穿越该区域,截获概率可达99.7%。
雷达搜索发现目标后,需要对该目标进行确认,排除杂波和干扰所引起的虚警。相控阵雷达一般通过在发现目标的波束指向附近发射确认波束,并以 m / n 准则(一般为2/3或3/5)确认目标。确认目标后,转入正常跟踪状态。搜索到目标后、转入正常跟踪前的这个过渡阶段,一般称为跟踪捕获阶段。
在搜索与确认期间,目标尚未建立航迹,其飞行方向、飞行速度并不准确,因此,在跟踪捕获阶段,一般使用较高的采样率,或者采用错开一定角度的“梅花状”确认屏进行快速确认。例如,两次确认采样的时间间隔会比正常跟踪情况高2~5倍。跟踪采样时间间隔越短,跟踪过程中越不会丢失目标,越容易进行目标回波的相关处理,但跟踪捕获阶段所花费的时间资源就越多。多目标情况下,时间资源及信号处理和数据处理计算量将大幅度上升。以导弹预警相控阵雷达为例,跟踪捕获阶段的采样时间间隔一般取零点几秒,便能实现可靠的跟踪捕获。
跟踪捕获阶段的时间长度或跟踪采样点数,取决于正常跟踪所要求的条件,这与信噪比、测量精度等有关。在相控阵雷达控制软件中,可以设置一个固定的确认时间长度或者固定的确认次数,也可将确认过程定义为自适应调整的。例如,如果确认波束都检测到目标,那就只要连续取得两、三点目标位置数据后,即可转入跟踪过程;如果两、三个确认波束未检测到目标,可持续更长的确认时间,进行自适应调整。
跟踪数据率或其倒数,即跟踪采样时间间隔,对相控阵雷达多目标跟踪性能有较大影响。正确选定跟踪数据率对确保跟踪的连续性(不丢失目标)、可靠性和跟踪精度有重要意义。如果不适当地提高跟踪数据率,将会使雷达系统设备量急剧增加,严重削弱雷达的搜索能力,不利于降低相控阵雷达的成本。
利用相控阵波束扫描的灵活性,分割时间片,对不同目标采用不同的跟踪数据率是解决跟踪时间资源管理的合理途径。因此,需要将被跟踪目标根据优先等级分成若干类,对不同类别的目标采用不同的跟踪采样时间间隔。例如,对处于跟踪捕获阶段的目标,采用较高的跟踪数据率,这类目标的跟踪状态可称为a状态,跟踪采样时间间隔为T tia 。对已经稳定跟踪的目标,可根据威胁度大小分成若干种跟踪状态。例如,威胁度大的目标,跟踪状态设定为b状态。跟踪采样时间间隔也较小,为T tib ;威胁度较小的目标,跟踪采样时间间隔可以较大。比如,大型相控阵雷达在观测卫星时,对参数已知的或轨道参数稳定的卫星,跟踪数据率可以降低;而对轨道参数不稳定或新发现的卫星,跟踪数据率可以设置较高。
根据探测需要,可定义若干种跟踪状态,对不同的跟踪状态分配不同的跟踪数据率和波束驻留时间(脉冲串长度),信号波形也可按不同的跟踪状态自适应调整。
假设某雷达设置4种跟踪状态,每种跟踪状态所对应的跟踪数据率及波束驻留时间可分别表示如下:
(3.7)
因此,各种跟踪状态所对应的跟踪间隔时间应是最小跟踪间隔时间的整数倍。
导弹预警相控阵雷达常常在跟踪目标时,还要分配部分资源对某些空域进行搜索警戒,一方面要对目标进行跟踪,另一方面还要继续对整个监视空域进行搜索,因此,只要监视空域中有目标存在,相控阵雷达就将以搜索加跟踪( TAS )的方式进行工作。搜索时只要满足一定的截获概率,搜索数据率可尽可能放宽要求,允许较大的搜索时间间隔。但为了保证目标跟踪的精度,并满足多目标航迹相关等要求,跟踪数据率要高些。为解决这一矛盾,常把跟踪时间安插在搜索时间内。
假定在某4个跟踪区域内存在目标的情况,这些目标的跟踪数据率都一样,跟踪时间均为T t 。天线波束还没搜索完整个监视区域时,由于跟踪数据率较搜索数据率高得多,必须暂时中断搜索过程,将天线波束用于跟踪。对这4个跟踪区域内的目标跟踪完成后,天线波束又继续进行搜索。搜索全部空域的搜索时间T s 应为T s1 ,T s2 ,…,T sk 的总和,在搜索间隔时间内,一共还要对4个目标进行跟踪,因此,搜索间隔时间T si 应为:
(3.8)
在对多目标进行跟踪时,有多种跟踪状态,相应地则有多种不同的跟踪时间间隔,因此,跟踪多目标用的搜索加跟踪( TAS )工作方式,其时间关系要更复杂一些。不论是哪种情况,搜索加跟踪( TAS )工作方式都要依靠相控阵天线波束扫描的灵活性和时间分割原理来实现。
导弹防御用远程预警相控阵雷达,在跟踪导弹目标的同时,还需要继续搜索空域,截获新目标,因此,搜索加跟踪( TAS )工作方式成为一种常态。相控阵雷达能跟踪的目标数目是它的一个重要战术指标。
跟踪事件T t 取决于跟踪目标数目n t 。设在一个时间帧内,有m个脉冲可用于跟踪m个方向的目标,能跟踪的平均目标数目为m P (m P ≤m),处于4种跟踪状态的目标数分别为n ta 、n tb 、n tc 和n td ,则用于这4种跟踪状态的目标跟踪时间分别为:
(3.9)
式中,N为每次跟踪所用的脉冲数,即重复周期数,极限情况下,N=1;F r 为雷达信号的重复频率。
若设搜索间隔时间T st 与跟踪间隔时间之比为ρ j , j 为跟踪状态的代号,于是有
ρ j =T si /T tij
(3.10)
则搜索间隔时间T si 可表示为:
T si =T s +ρ a T ta +ρ b T tb +ρ c T tc +ρ d T td
(3.11)
式中,搜索时间T
s
按式(3.8)的
 计算。
计算。
如果搜索时间和最大允许的搜索间隔时间是给定的,那么允许的最大跟踪目标数目便可完全确定,其计算公式为:

(3.12)
能跟踪的目标总数n为:
n=n ta +n tb +n tc +n td
(3.13)
式(3.12)和式(3.13)表明,跟踪目标数目与重复频率及每个时间帧内能独立跟踪的目标数目成正比,而与用于跟踪的重复周期数或脉冲串长度(N)成反比。若用于搜索的总搜索时间T s 越小,而允许的跟踪间隔时间越大,则跟踪目标数目将因(T st -T s )的增加而增加。最小跟踪间隔时间T tia 对跟踪目标数影响最大,n随着T tia 的降低而减少,T tia 的影响在式(3.12)中是通过ρ a 表示的。从物理概念来说,显然,若T tia 很小,则在T st 时间内,就要对a跟踪状态的目标跟踪许多次,搜索过程将不断被跟踪状态中断。
以上计算跟踪目标数目的例子是所有目标均已处于跟踪状态时的情况。如果搜索过程中不断出现新目标,有的被跟踪目标飞出雷达监视空域,那么情况将略有不同。
由于受到阵地部署、威力、精度及来袭目标类型、特点等因素的限制,单部雷达往往无法独立完成对突防目标实施有效的截获、跟踪和制导任务,预警体系通过多部雷达间的任务交接实现对全弹道的自适应跟踪。多部雷达间目标交接的资源自适应调度与管理是预警系统实现系统最优效能的核心,需要根据参与交接任务雷达所面临的作战环境、承担的作战任务、雷达自身能力等因素,按照一定的交接准则,控制一部雷达和其他不同雷达间交接、两个雷达的不同目标间交接的交接方式,实现雷达资源的自适应最大化管理。
预警探测系统从体系作战的角度,为了给精密跟踪识别雷达充足的目标识别时间,通常选择“早交接、早识别”的策略,交接时间最短可以有效提高防御体系对来袭目标的目标识别和拦截效率。多雷达间交接通常包含波束交接和预测交接两种方式,交接方式的选择遵循以下准则。
(1) 参与交接的两部雷达存在共视区。
① 被引导的跟踪识别雷达资源紧张时,必须使用波束交接;
② 预警引导雷达和被引导的跟踪识别雷达资源都紧张时,必须使用波束交接;
③ 预警引导雷达资源空闲时,应该使用波束交接;
④ 引导雷达资源紧张、被引导的跟踪识别雷达资源空闲时,应该使用预测交接。
(2) 参与交接的两部雷达不存在共视区,只能使用预测交接。
根据预警引导雷达预报的弹道轨迹,被引导雷达在预测时刻和位置搜索截获目标的交接过程称为预测交接。预测交接方式对预警引导雷达预报精度有较高要求,如果引导雷达预报误差大,被引导的精密跟踪识别雷达需要设置较大的截获搜索窗,才能覆盖目标可能出现的区域,需要的截获搜索时间大,当被截获目标的速度较大时,截获窗内搜索次数将会减少,影响对目标的有效截获。多雷达预测交接示意图如图3.7所示。
图3.7 多雷达预测交接示意图
接到交接控制命令后,计算交接预报点(区域)位置,外推弹道运动信息(时刻、位置和速度等)和弹道预报的误差管道,精密跟踪识别雷达根据预报时刻、位置、误差管道大小,通过坐标系变换将预报位置空间分布转化到精密跟踪识别雷达坐标系内,按照截获概率要求自适应确定最优截获窗口大小。若首次截获不成功,在第二交接点设置截获窗搜索截获目标。两个交接点的时间间隔根据弹道预报的时间误差、截获窗内驻留时间及新截获窗建立时间计算,确定来袭导弹的多个预测交接点,依次在交接位置2、3进行多次截获搜索,直到捕获目标。
当精密跟踪识别雷达承担多个目标的跟踪识别任务时,不管远程预警雷达时间资源是否紧张,从预警体系整体资源和效率考虑,为了确保短时间内完成交接任务,必须采用波束交接的方式。波束交接是通过参与交接的两部雷达同时跟踪来袭目标,在精密跟踪识别雷达进行截获时,远程预警雷达仍维持目标跟踪,并不断更新交接位置数据直至完成目标交接。波束交接具有交接精度高、交接时间短等特点,波束交接示意图如图3.8所示。
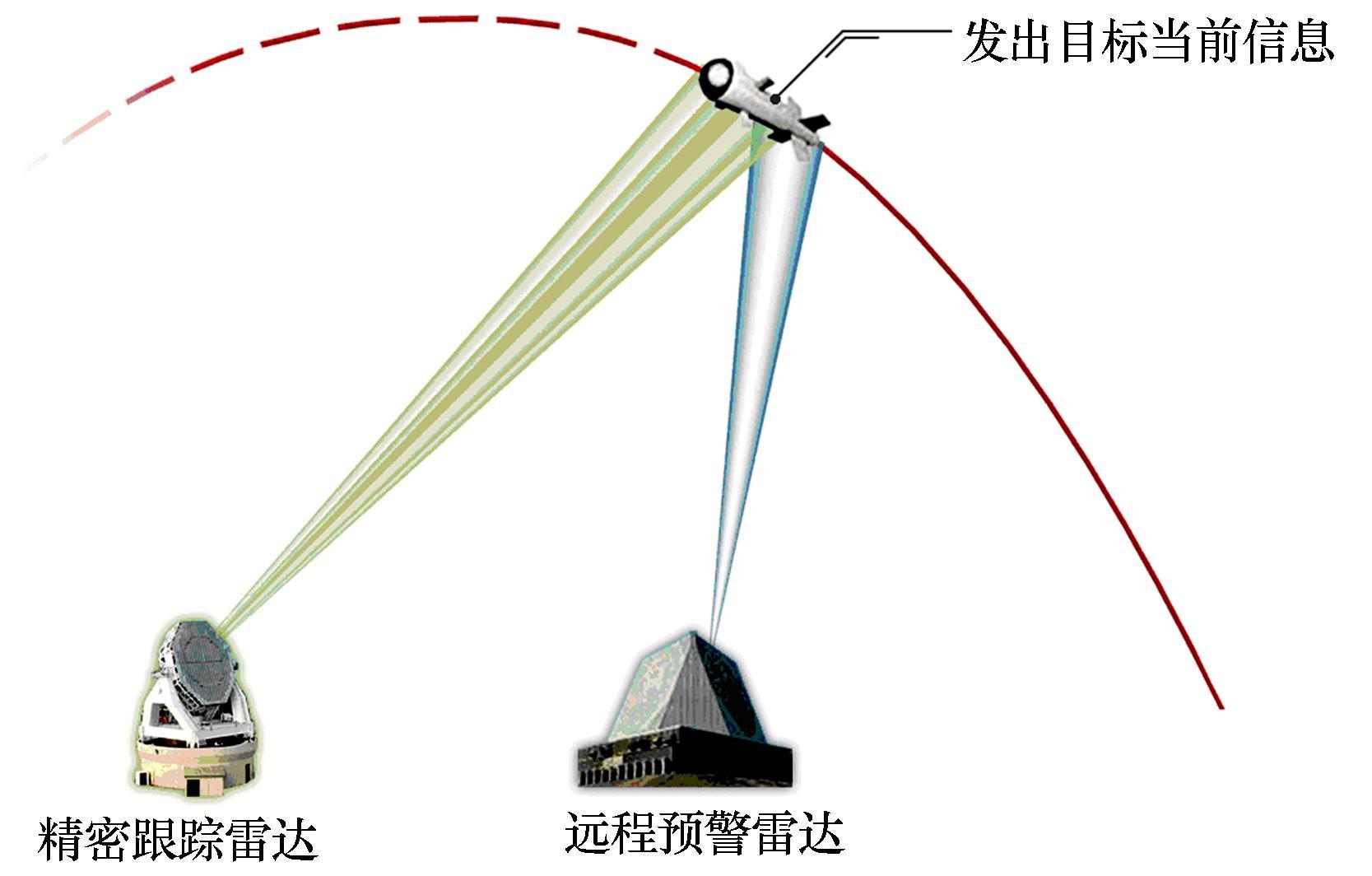
图3.8 多雷达波束交接方式示意图