
下载掌阅APP,畅读海量书库
立即打开




基于ARM Cortex-M3的STM32F103微控制器单片机教学开发板(或者说机器人大脑)需要连接电源以便运行,同时也需要连接到PC机或笔记本电脑以便编程和交互。以上接线完成后,你就可以用编辑器软件来对系统进行开发与测试。下面将告诉你如何完成上述硬件连接任务。
串口线连接
STM32F103微控制器单片机教学开发板通过串口电缆连接到PC机或笔记本电脑上以便与用户交互,如图1.6(a)所示。如果你的计算机有串行接口,直接使用串口连接电缆。如果没有,此时需要使用USB转串口适配器,如图1.6(b)所示。将一端的串口连接到你的教学开发板上,而另一端连接到计算的USB口上,并安装对应的USB驱动程序。
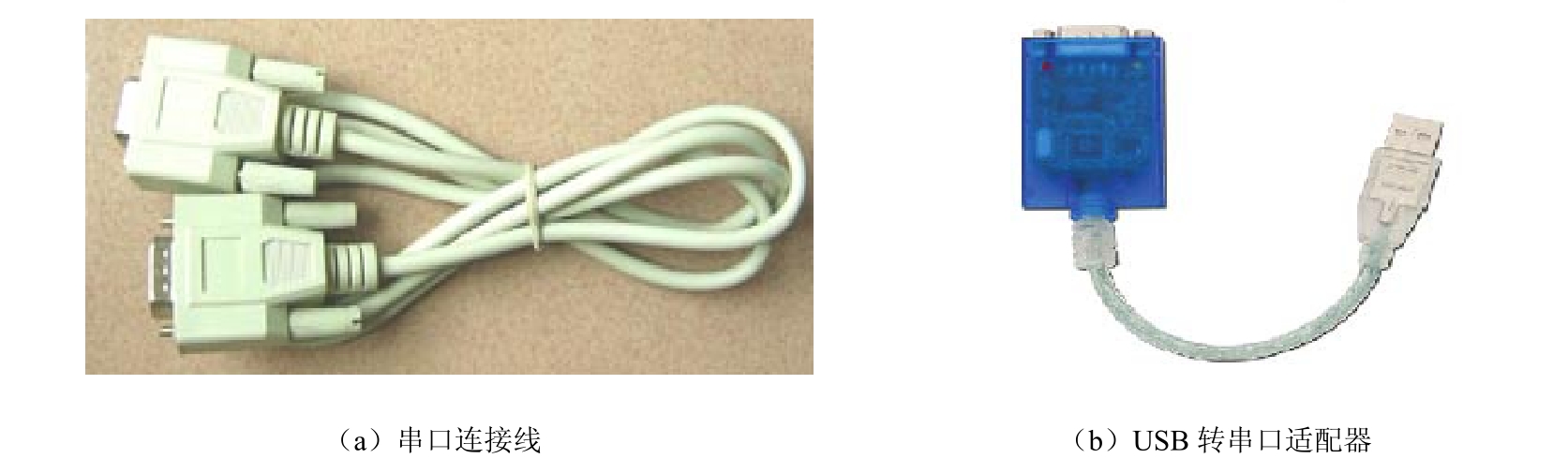
图1.6 串口线连接
基于ULink的JTAG下载线连接
程序是通过连接到PC机或者笔记本电脑USB口的ULink来下载到教学开发板上的单片机内。图1.7所示为ULink下载工具。下载线一端通过USB线连接到PC机或者笔记本电脑的USB口上,而另一端连接到教学开发板上的JTAG口上。
如图1.8所示,这里用的USB线一端是扁形(A型),一端是方形(B型),如图1.8(a)所示。扁形口接电脑,方形口接ULink。USB线一般分为不带屏蔽的USB线和带屏蔽的USB线,外表有屏蔽层的就是带屏蔽的USB线,如图1.8(b)所示,右边的USB线是带屏蔽的,左边的USB线是不带屏蔽的。建议用于程序下载使用的USB线为带屏蔽的。
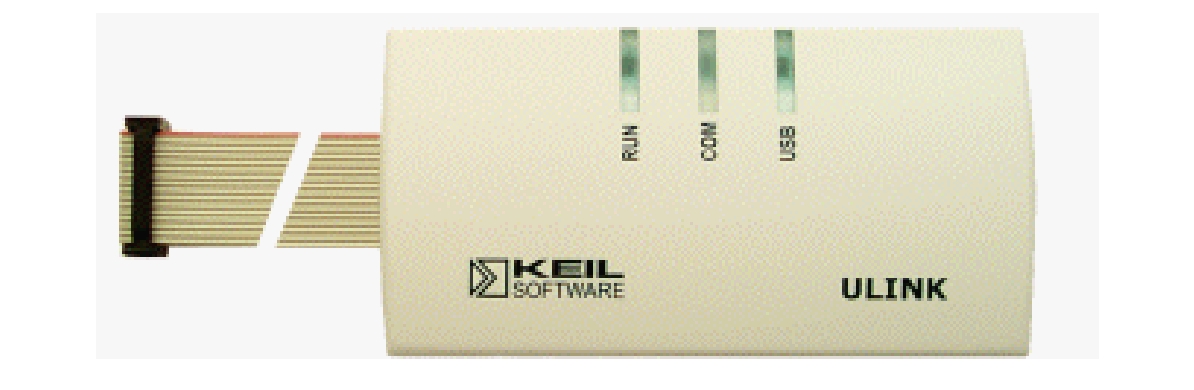
图1.7 ULink下载工具
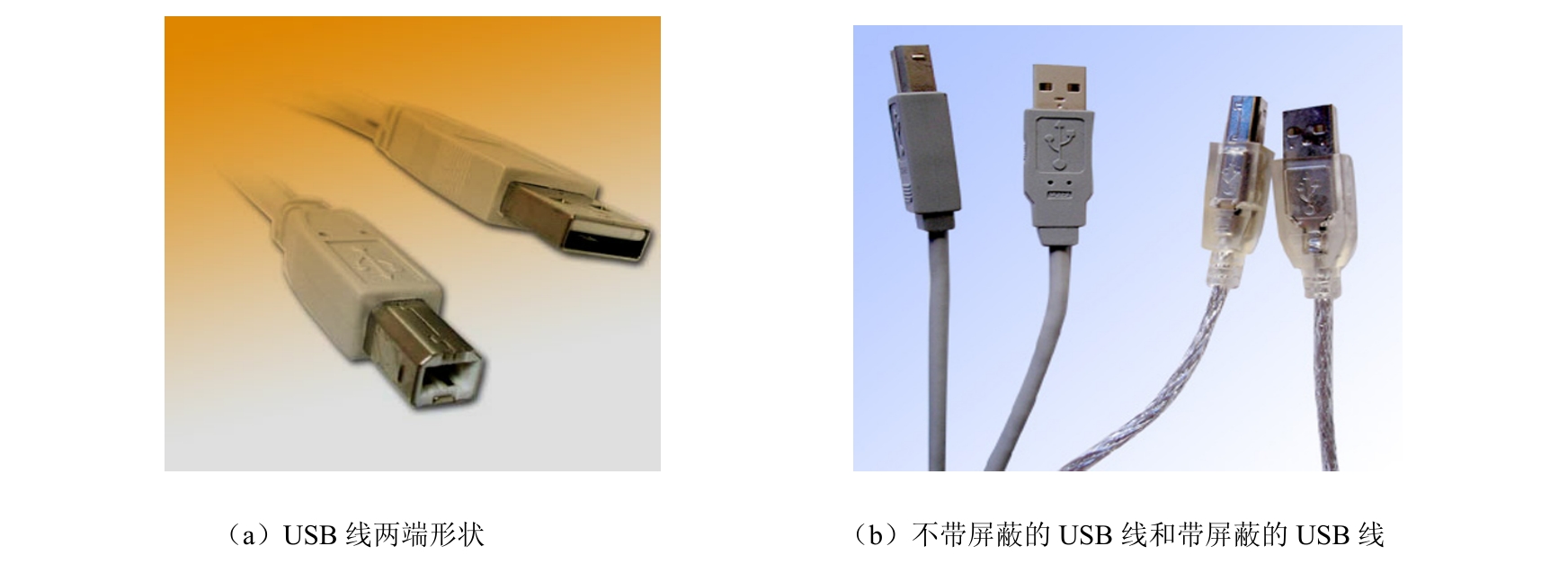
图1.8 USB线
电源和电池的安装
教学开发板可以使用从电脑USB口引出的5V电源。使用图1.8(b)左边不带屏蔽的USB线,扁形口接电脑,方形口接教学开发板。但需注意电脑引出的USB电源供电电流最大只有500mA,当给电机(舵机)供电时可能会造成供电电流不足,导致电机(舵机)不能正常工作。教学开发板也可使用电池供电。本书使用的机器人采用4节五号碱性电池给机器人电机和教学开发板供电,可将电池盒引出的电源线插入电源插座(f2.5细针)。在继续下面的任务前,请先检查机器人底部电池盒内是否已经装好电池,并是否有正常的电压输出。如果没有,请更换新的电池。更换过程中,确保每颗电池都按照塑料盒子里面标记的电池极性(“+”和“-”)方向装入。
当然,教学开发板也可以使用外接的5V或6V输出的电源适配器供电。
给教学开发板进行通电检查
教学开发板上有一个电源三位开关。如图1.9(a)所示,当开关拨到“0”位断开教学开发板电源。无论你是否将电池组或者其他电源连接到教学开发板上,只要三位开关位于“0”位,那么设备就处于关闭状态。
现在将三位开关由“0”位拨至“1”位,打开教学开发板电源,如图1.9(b)所示。检查教学开发上的LED电源指示灯是否变亮。如果没有,检查USB供电线缆或者电池盒的接头是否已经插到教学开发板的电源插座上。
将开关拨至“2”后,电源不仅要给教学开发板供电,同时还会给机器人的执行机构——伺服电机供电,同样地,此时LED电源指示灯仍然会变亮。
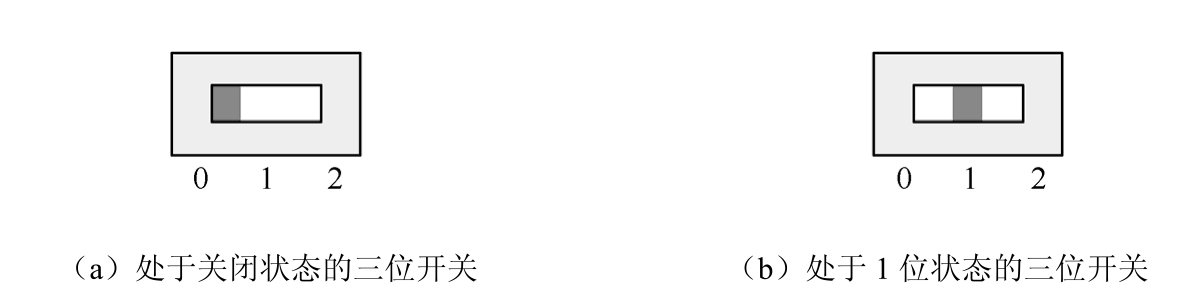
图1.9 电源三位开关