
下载掌阅APP,畅读海量书库
立即打开




仿真初始化结果如下:
h pi =10 s
无人机初始位置为:
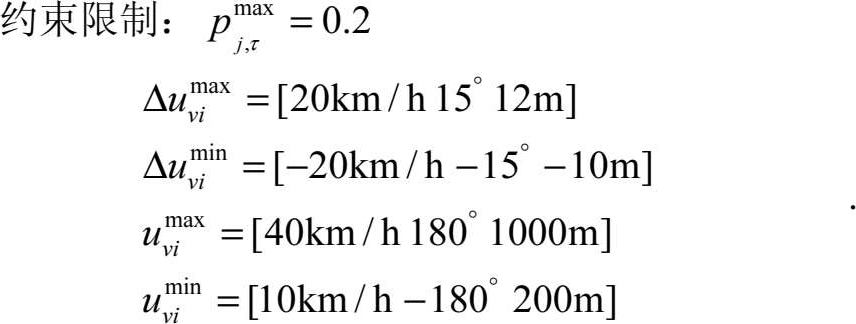
无人机初始控制输入点集为:

权衡常数: ξ ob =400, ξ t ( τ )=1, a = b =0.5
对角矩阵的对角元素在控制时域相同,为 λ =[1×10 -3 1×10 -2 1×10 -4 ] T 。
仿真结果如图2所示。图中虚线代表障碍物和目标点的飞行轨迹,实线代表无人机的飞行轨迹,“v1、v2、v3、ob1、ob2、ob3、target”分别表示“无人机1、无人机2、无人机3、障碍物1、障碍物2、障碍物3、目标点”。
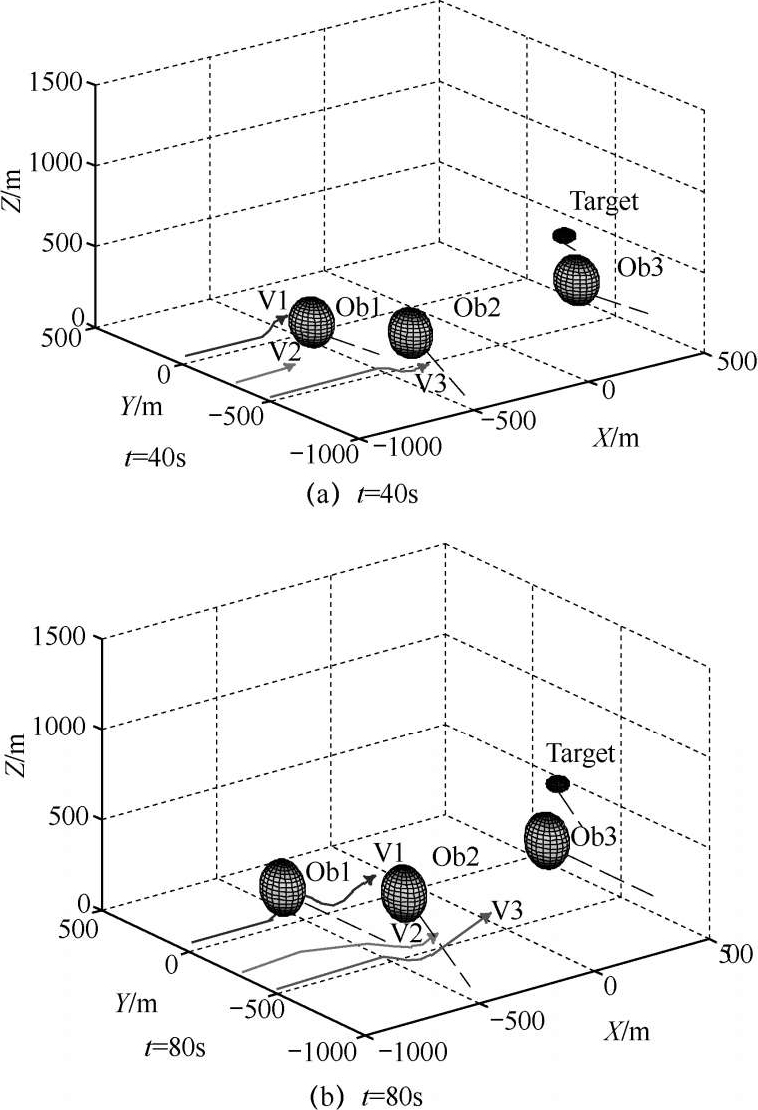
图2多无人机协同防碰撞飞行轨迹
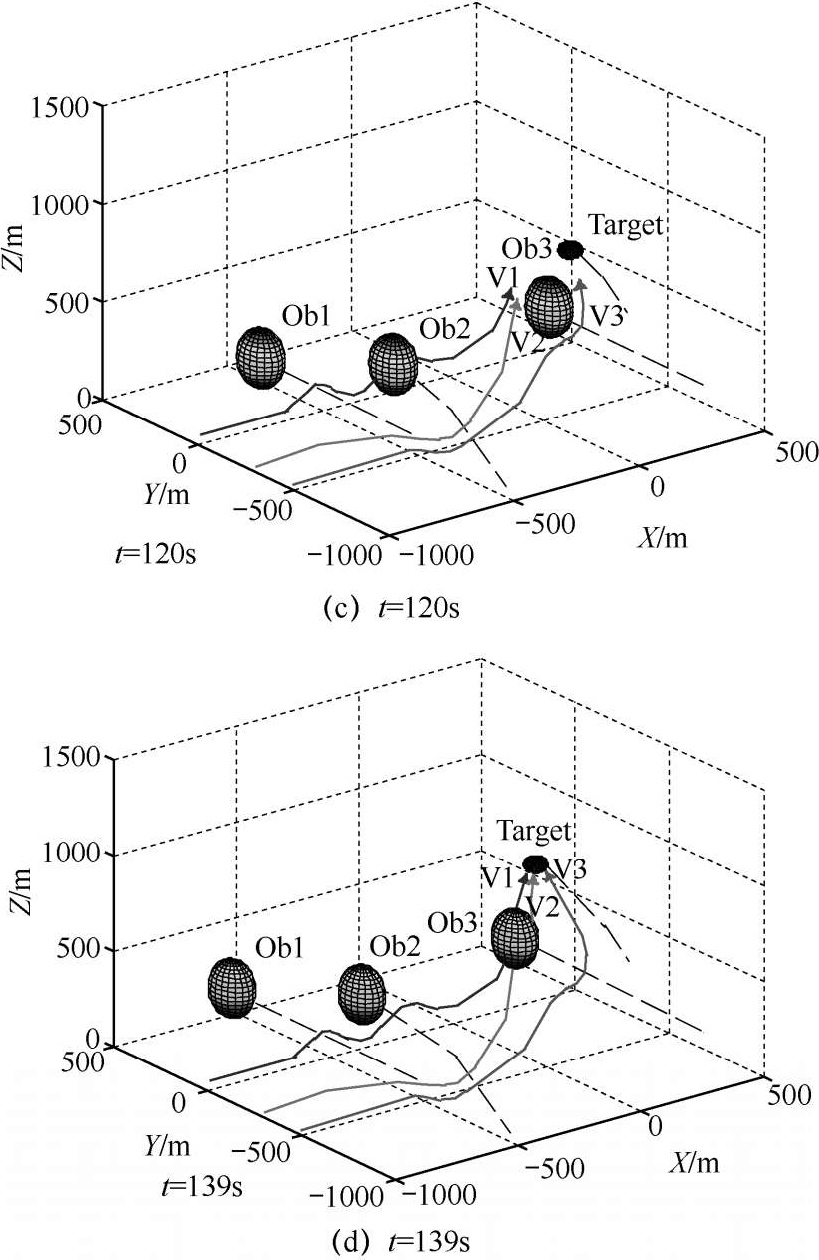
图2多无人机协同防碰撞飞行轨迹(续)
由图2可知,无人机1和3在30s分别发现了障碍1和2,进行信息共享,无人机2在50s提前采取措施以规避障碍2,无人机1在64s提前采取措施规避障碍2;无人机3在108s最先发现障碍3,并将其信息共享给无人机1和2,无人机1和2提前采取措施以规避障碍3,并使得最终三架无人机同时追踪到目标。
两个无人机编队均在二维水平面内,防碰撞决策主要依靠无人机航迹偏角的改变。无人机成员的速度恒定为20m/s ,无人机防碰撞距离为
ρ
c
=400m 。两个集群系统的初始航迹偏角分别为:
ψ
1
=0°,
ψ
2
=180°。无人机的动态特性约束条件为:滚转角−20°≤
 c
≤20°,俯仰平面内过载
n
y
≤ 2g,偏航平面内过载
n
z
≤4g,转弯半径
r
d
≥200m 。集群系统正常飞行时,各飞行规则所对应权重的初始值为:
c
≤20°,俯仰平面内过载
n
y
≤ 2g,偏航平面内过载
n
z
≤4g,转弯半径
r
d
≥200m 。集群系统正常飞行时,各飞行规则所对应权重的初始值为:

若编队探测到外部的无人机,权重分别变化:

防碰撞飞行轨迹如图3所示。无人机成员之间的最小距离 R mix 和所有无人机成员离编队质心距离的最大值 d max 变化曲线如图4所示。
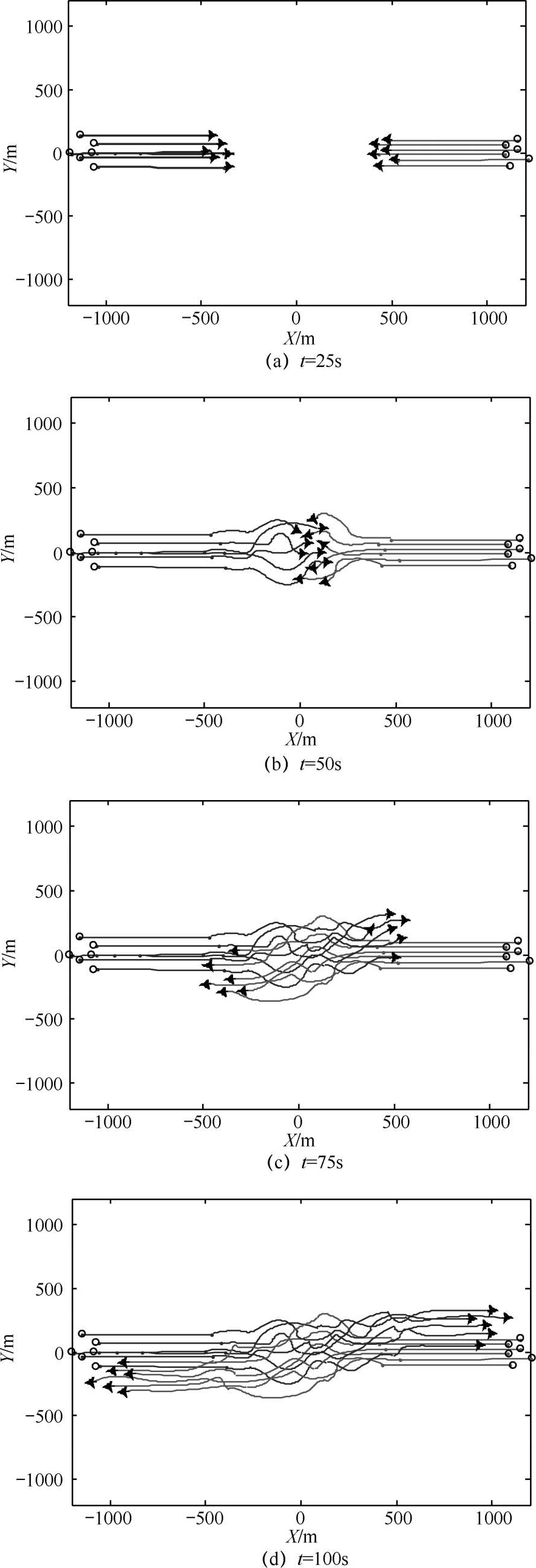
图3两个无人机编队协同防碰撞飞行轨迹
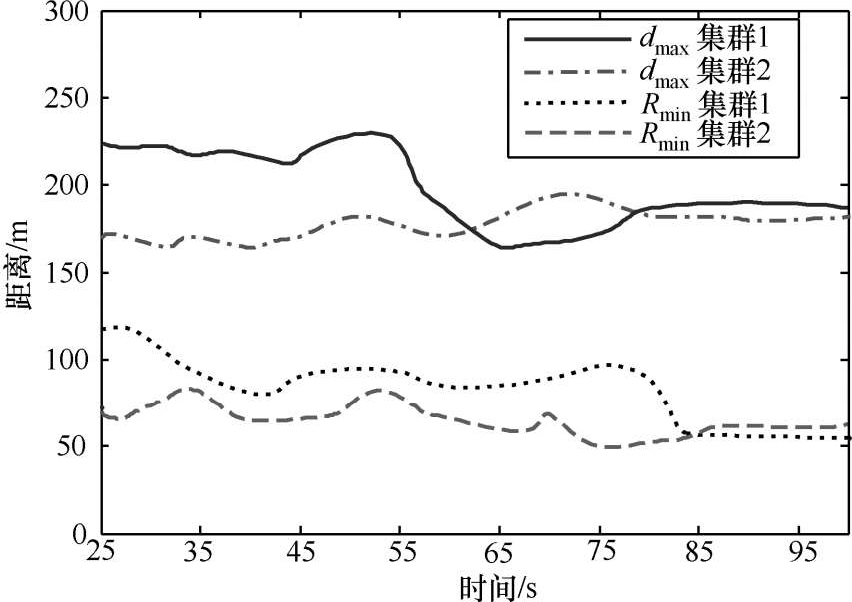
图4 R mix 和 d max 的变化曲线
从上图可以看出,在基本飞行规则作用下,无人机集群能以一定队形保持平稳飞行,同时在防碰撞规则的作用下,可以完成防碰撞,完成规避之后,能实现队形重构。