
下载掌阅APP,畅读海量书库
立即打开




借助群智能思想 [12,14] ,对于满足式(1)、式(2)和式(3)的无人机编队系统,令 ψ pi 和 θ pi 分别为期望航迹偏角和期望航迹倾角,系统内部第 i 个无人机成员的基本飞行规则抽象为
内聚:
跟随:
自导引:
分散:
同盟:
式中,( X iM , Y iM , Z iM )为 n i 个无人机成员的平均质心坐标,( X iL , Y iL , Z iL )为离该无人机成员最近的无人机的质心坐标,( X iR , Y iR , Z iR )为随机选择的无人机的质心坐标,( X iI , Y iI , Z iI )为跟踪信号所处的坐标,( X iS , Y iS , Z iS )为与第 i 个无人机成员间隔小于 s min 的无人机的平均质心坐标。
则群智能规则的多无人机协同防碰撞方法可描述为:根据 ψ di 和 θ di 的计算结果,从而得到Δ ψ di 和Δ θ di ,每架无人机执行该制导指令后即可实现无碰撞飞行。Δ ψ di 、Δ θ di 的计算公式如下:
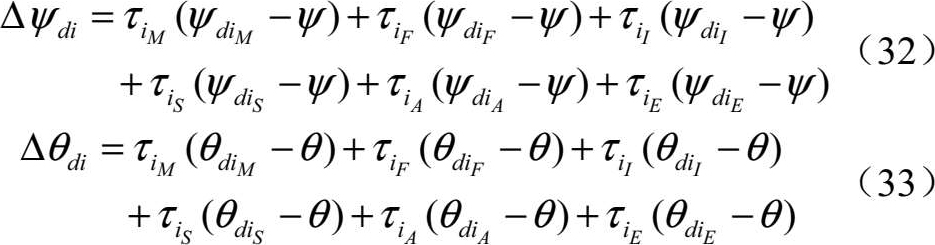
式中, τ 表示对应飞行规则的权重系数, τ iE 表示防碰撞规则的权重系数。
防碰撞:
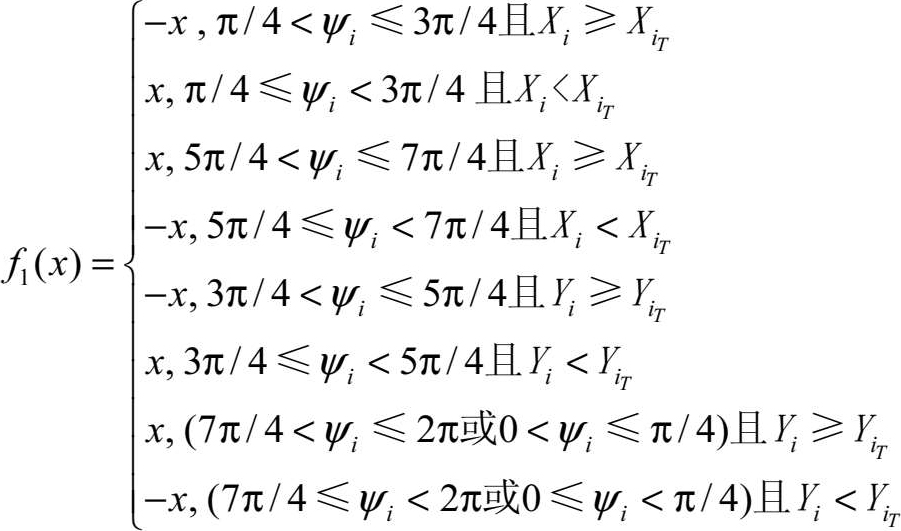
令编队内第 i 个无人机成员的期望航迹偏角为

式中, f 1 是为完成防碰撞设置的方向变换函数。设( X iT , Y iT , Z iT )为处于第 i 个无人机成员探测距离并位于该编队外的所有碰撞威胁的平均质心坐标,则 f 1 ( x )可表示为
类似地,第 i 个无人机成员的期望航迹倾角为

式中, f 2 是为完成防碰撞设置的方向变换函数,且 f 2 ( x )表示为

对于第 i 个无人机成员,防碰撞规则的权重定义如下:
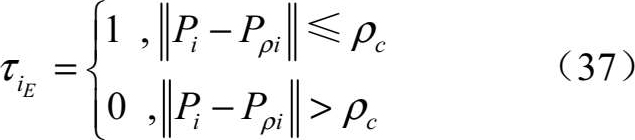
式中, P i = ( X i , Y i , Z i ), P ρi =( X iT , Y iT , Z iT ), ρ c 表示无人机的防碰撞距离。