
下载掌阅APP,畅读海量书库
立即打开




在单机自主防碰撞方法的基础上,构建多无人机协同感知与防碰撞系统结构,如图1所示。
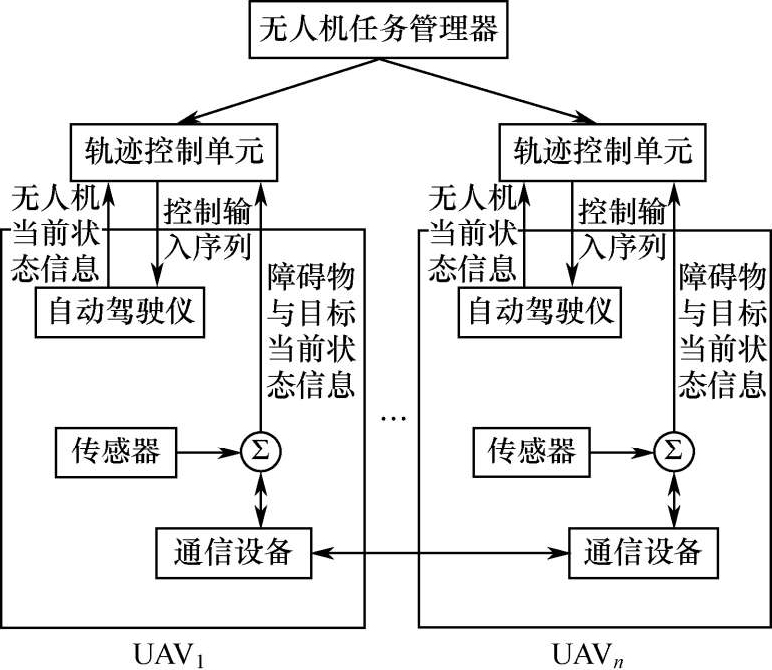
图1多机协同感知与防碰撞系统结构
多无人机协同感知与防碰撞系统核心的功能为协同感知协同规避。
1)协同感知
每架UAV均利用机载摄像机、雷达、红外探测器等传感器对任务空域的环境信息进行测量,实现对障碍物的感知。无人机获得障碍物和目标的信息后,能够与处于其通信距离内的无人机进行共享,实现对环境的协同感知,从而获得更加精确和全面的环境信息。
2)协同规避
无人机获得障碍物和其他成员的信息后,随即探测碰撞威胁,通过决策方法采取相应的碰撞规避机动,并发出恰当的规避导引或机动指令,使飞控系统能够按照指令操纵飞机自主飞行,摆脱潜在的威胁,全面的环境感知可以指导无人机的协同防碰撞制导决策,实现决策行为总体优化。