
下载掌阅APP,畅读海量书库
立即打开




UCAV初始位置(100000m,-15000m,7000m);初始速度250m/s,航迹倾角0°,航迹偏角180°;目标初始位置(0m,0m,7000m);初始速度250m/s,航迹倾角0°,航迹偏角0°;假定机载雷达对RCS为5m 2 的目标最大探测距离为50000m;假定目标在没有探测到UCAV前机动状态保持不变,目标在UCAV探测范围外时,UCAV需要的目标位置信息由地面雷达传送。UCAV模型参数参考F-4“鬼怪”战机 [12] ,导弹与雷达模型如前文所述,目标与UCAV参数相同。仿真结果如图6和图7所示。
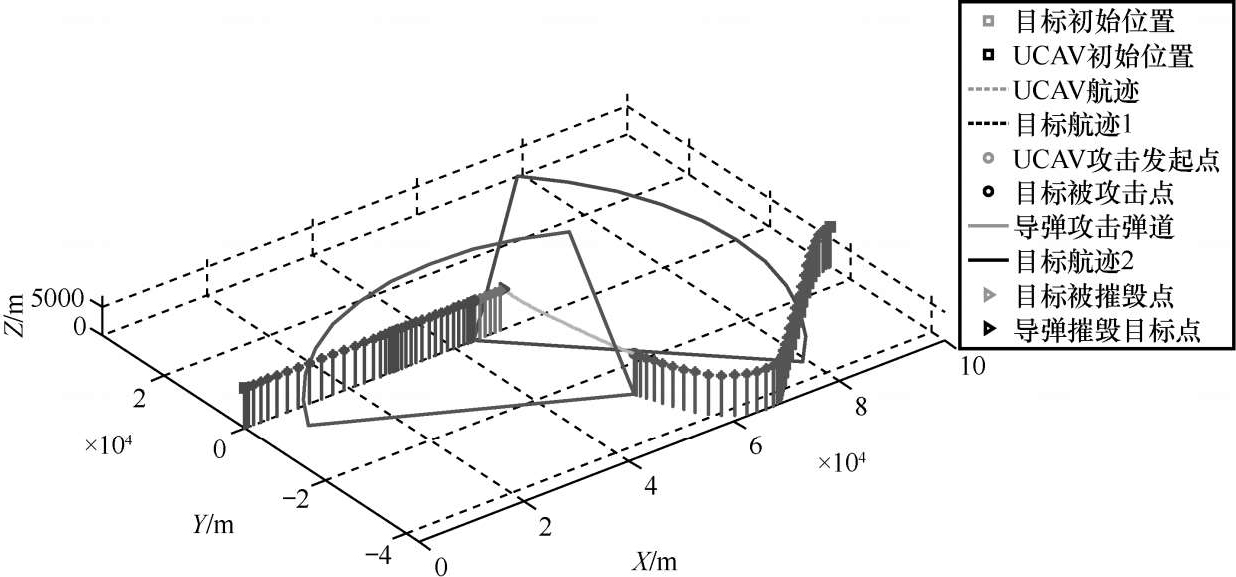
图6 UCAV远距攻击占位航迹3D视图
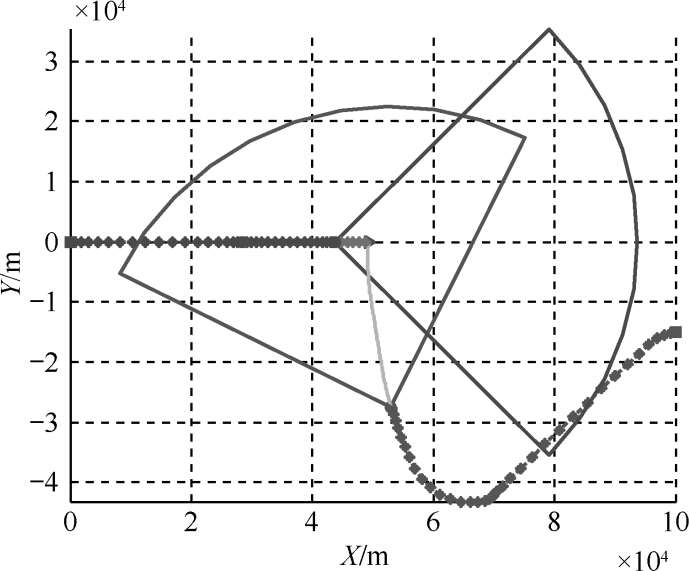
图7 UCAV远距攻击占位航迹水平视图
图6~图7分别给出了UCAV占位航迹的三维视图、俯视图和侧视图。航迹规划的第一阶段从时刻 t =0s开始,结束时刻 t =113s;第二阶段从时刻 t =113s开始,结束时刻为 t =175s。在规避目标威胁阶段,UCAV直线脱离目标的可探测区域,满足约束条件需求;在低可见接敌阶段,UCAV迎头接近目标,降低了自身RCS被探测值。绿色的导弹飞行弹道表明导弹成功击毁目标,完成了攻击占位的任务需求。
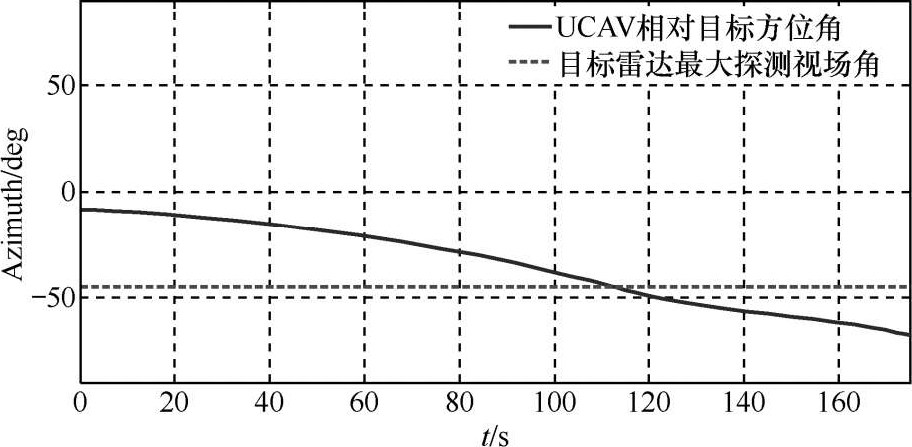
图8 UCAV相对目标方位角
图8给出整个规划时间域上UCAV相对目标方位角的变化。在 t =113s时刻,UCAV相对目标的方位角超过了目标雷达最大探测包络角度,满足第一阶段航迹规划的末端约束。且方位角随时间增大,UCAV与目标视线越来越靠近两翼方向,获得的目标RCS值越来越大,规避了目标威胁的同时获得了对目标更远的探测距离。
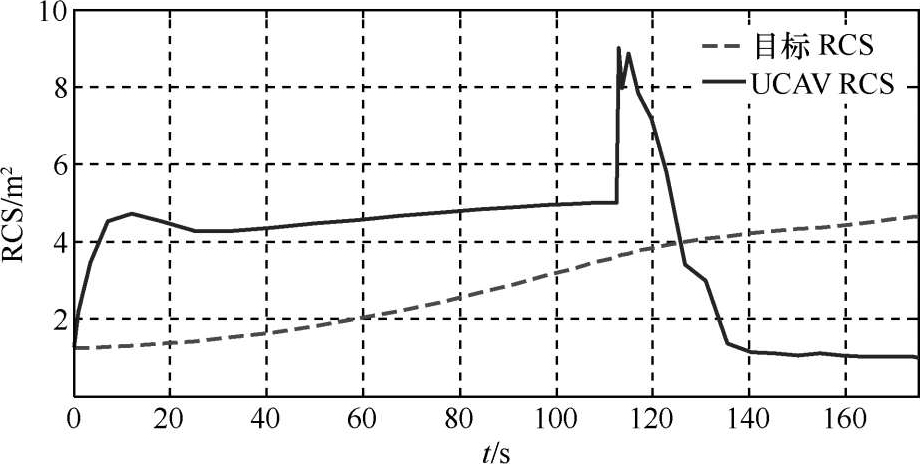
图9 RCS
图9给出了整个规划时间域内的UCAV与目标的RCS变化。在航迹规划的第一阶段内,初始时刻UCAV与目标相向运动,二者RCS相同。下一时刻,UCAV左转,以增大对其相对目标的方位角。UCAV在进行左转机动时,由于法向加速度指向的逆时针偏转,相应产生的滚转角将使UCAV的RCS迅速增大。随后,UCAV保持平飞状态,由于UCAV偏航角不为0°,目标相对UCAV的方位角大于UCAV相对于目标的方位角,因此反映在图中为UCAV的RCS大于目标。在第二阶段内,UCAV由规避转为攻击。UCAV右转迎向目标,转弯产生的滚转角增大了UCAV的RCS,随后迎头接近目标,RCS迅速降低并且保持稳定。整个阶段保持了较小RCS的优势,满足低可见性接敌的作战需求。
图10给出了四种距离随时间变化的关系。其中暴露距离是指在当前RCS值下被雷达可探测的最远距离,见公式(4)。在 t =113s时刻前,UCAV的暴露距离小于UCAV与目标的相对距离,避免了被目标雷达发现。在 t =113s后,由于UCAV的RCS短暂波动,UCAV暴露距离相应增大,但都小于相对距离,且此时UCAV已经位于目标探测包络外。在 t =166s时刻,目标暴露距离开始小于相对距离,此时UCAV可以对目标进行主动扫描和跟踪。在最后 t =175s时刻,目标进入UCAV导弹攻击包络范围,UCAV发射导弹,目标被击毁。
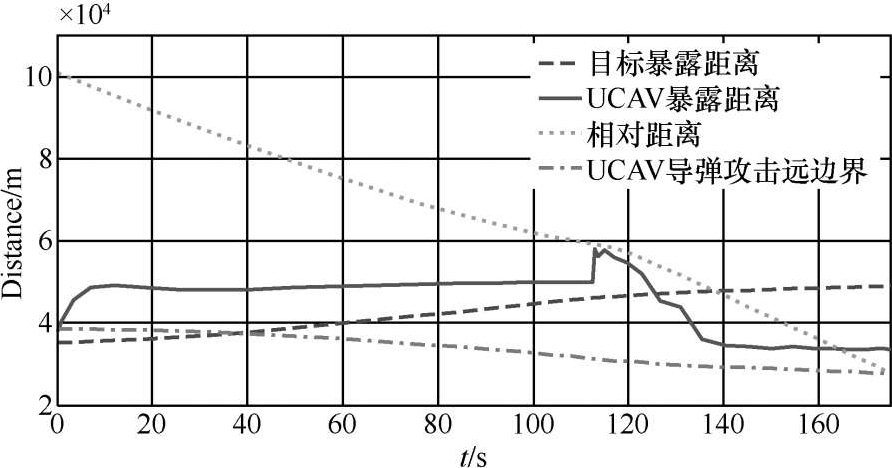
图10相对距离示意图
图11~图12给出了UCAV三个控制量的变化曲线。曲线连续,满足控制量的约束条件,证明了航迹规划结果的正确性与可行性。
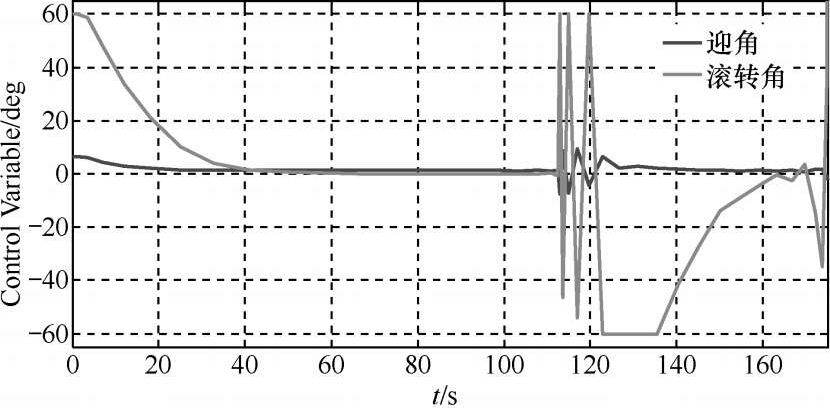
图11控制量
对UCAV不同初始航迹偏角情况下进行仿真,验证算法的适用性,如图13~图15所示。
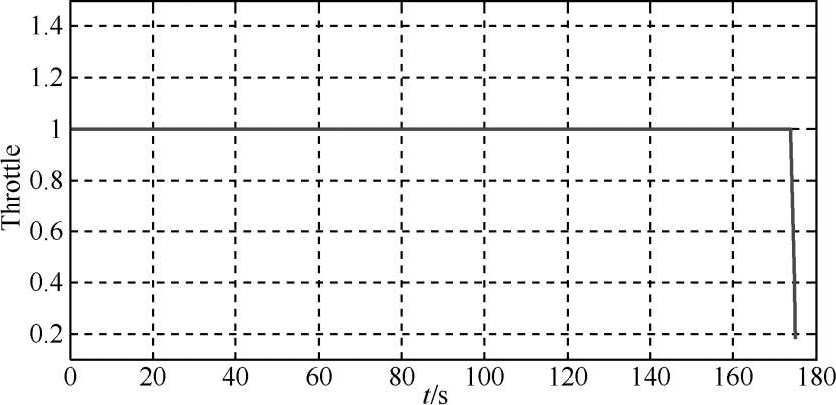
图12油门
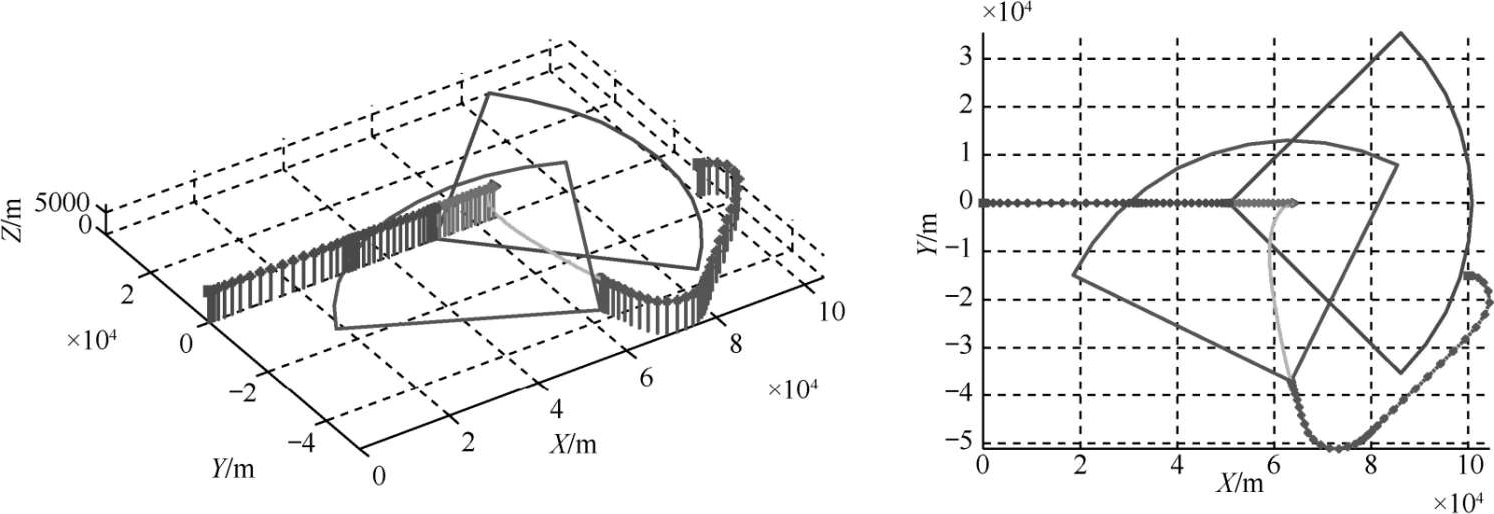
图13初始航迹偏角为0°时UCAV占位航迹
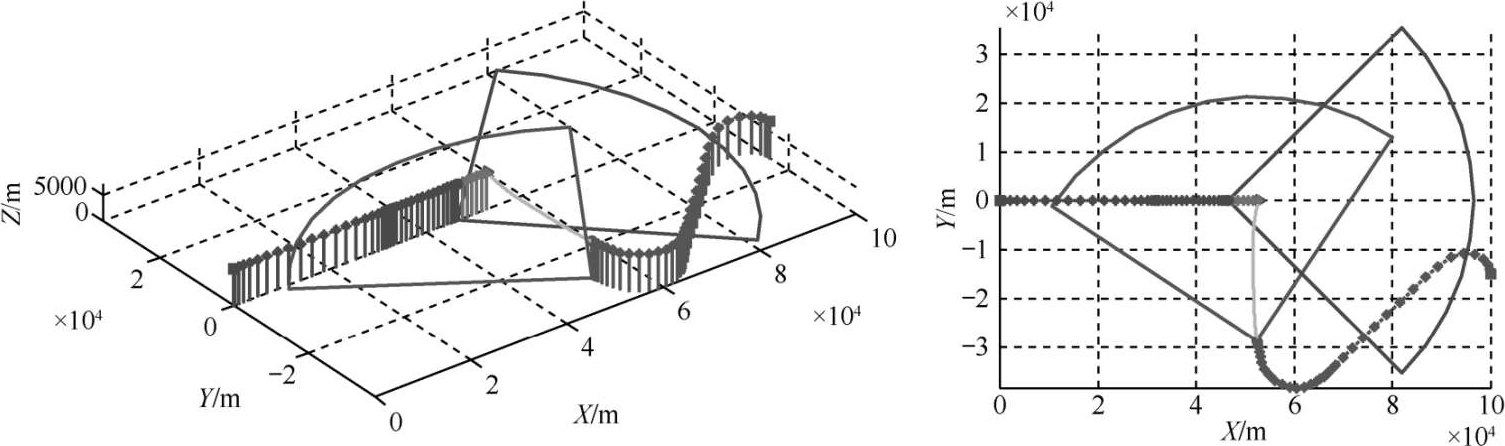
图14初始航迹偏角为90°时UCAV占位航迹
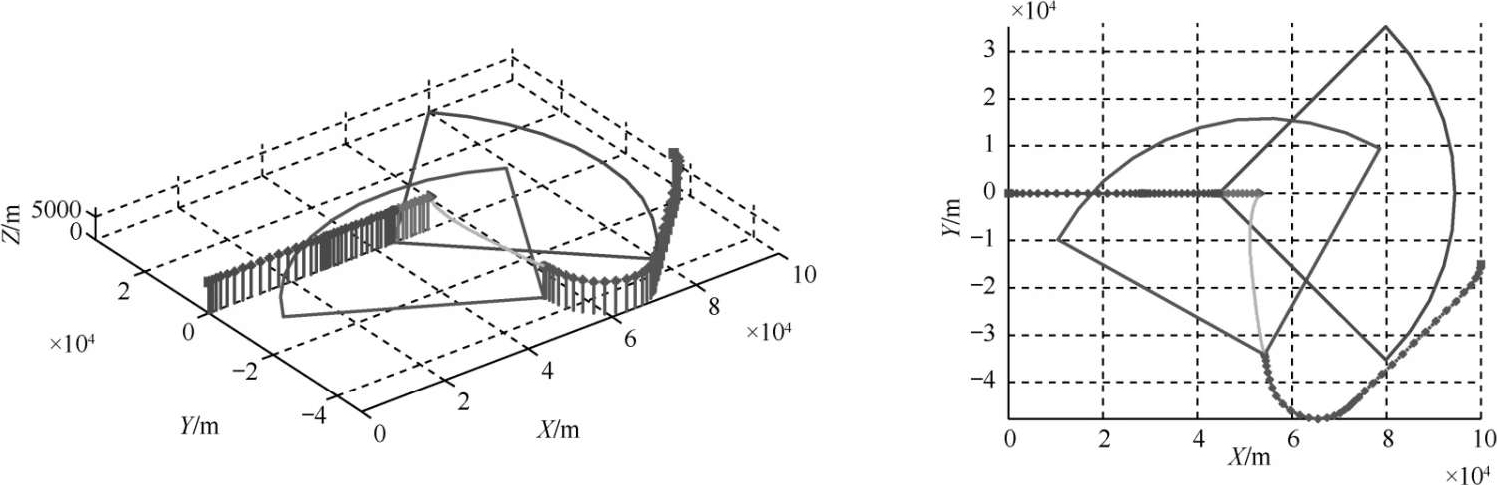
图15初始航迹偏角为-90°时UCAV占位航迹